
基于激光扫描的地铁隧道收敛变形快速检测技术*
2022-11-21 05:57刘新根许敏娟邢智馨
城市轨道交通研究 2022年9期
刘新根 许敏娟 邢智馨
(1.上海同岩土木工程科技股份有限公司, 200092,上海;2.上海地下基础设施安全检测与养护装备工程技术研究中心,200092,上海;3.昆明地铁运营有限公司, 650011,昆明∥第一作者,高级工程师)
隧道结构安全状态是地铁运营监护的重点,而其变形监测则是重中之重。目前,传统的隧道结构收敛变形检测主要采用人工手持位移收敛计进行测量,工作效率低且数据覆盖性差。除此之外,还有通过预安装激光测距仪进行隧道收敛变形监测的方法,但其前期投入及后期运营维护成本均很高,且不能全隧道覆盖测量。三维激光扫描技术能够高密度、高分辨率、非接触地获取对象表观海量点云数据,是较为理想的隧道变形测量方法。
文献[1]提出了从原始激光测距数据集中提取隧道轮廓线的方法,精度可达±0.5 mm。文献[2]提出了一种通过视觉辅助、激光测距和自动测量周围标记的岩体位置相对变化方法。文献[3]将三维激光扫描仪与组合轨道导航车、惯性系统相结合,实现了隧道数据的自动化采集。文献[4]提出了隧道轮廓三维激光扫描横断面提取的高效方法,提高了隧道收敛变形监测的效率。文献[5]通过试验改进地面激光扫描的测量方法,从而减小系统测量误差。文献[6]基于三维激光扫描数据,提出了一种连续截取地铁隧道断面的方法,单点扫描精度为2 mm。文献[7]利用三维激光扫描技术获得隧道内部结构点云数据,并进行点云环片提取分析变形。文献[8]将三维激光技术引入隧道变形监测中,实现了隧道收敛快速高效监测。文献[9]将三维激光扫描仪运用到海底隧道施工安全监测中,偏差在4 mm以内。文献[10]基于三维激光扫描技术,提出了基于激光点云的隧道断面连续提取与形变分析方法。文献[11]使用GRP5000移动激光扫描系统,以不超过1.8 km/h的推行速度对运营期盾构隧道进行检测。文献[12]提出针对地铁隧道横向变形的移动检测方法,误差控制在2 mm以内。文献[13]提出了基于特征点的改进算法,提高了地铁隧道三维激光扫描数据的配准效率。文献[14]提出了基于k维二叉树(kD-tree)和法向量估计的局部点云简化方法,改进了BaySAC算法的三维激光点云二次参数曲面拟合方法。
综上,多数研究是基于激光扫描技术进行静态监测的,数据处理中人工干预较多,移动测量速度较慢,难以满足作业要求。本文基于激光扫描数据处理技术,提出一种高精度组合里程定位修正方法,研制的移动式地铁隧道结构变形检测车可为地铁隧道变形提供高效、精准的非接触移动式测量。
1 隧道收敛变形检测技术
1.1 移动式激光断面扫描
三维激光扫描是一种非接触式测量技术,利用激光测距原理能够快速扫描被测物体表面并获取大量密集点的三维坐标、反射率等信息。通过对激光扫描数据进行预处理(噪点剔除、坐标修正等),再通过曲线拟合结果与隧道轮廓的设计值或历史扫描数据比对,即可获得这一时段隧道各方向的收敛变形。

图1 移动式激光扫描示意图Fig.1 Diagram of mobile laser scanning
移动式激光扫描示意图如图1所示。由图1可知,地铁隧道移动式激光扫描是利用轨道移动激光扫描设备对隧道进行螺旋式运动扫描,其纵向扫描间距与激光扫描转速、移动速度有关。例如,当激光扫描仪频率为100 Hz、移动测量速度为10 km/h时,其三维激光扫描环间理论间距为2.78 cm,故在实际扫描测量时,需依据测量精度,综合选用激光扫描移动速度和扫描转速。中国工程建设标准化协会标准T/CECS 10024—2019《公路隧道检测车》规定:隧道激光扫描纵向点间距宜小于100 mm。考虑到地铁隧道结构变形控制更为严格,故对于地铁隧道激光扫描环间距Ls不宜大于50 mm。
1.2 高精度里程定位
地铁隧道收敛变形计算需要对相同位置的前后检测数据进行对比才能确定,故检测数据需要较高的里程定位精度。常规的检测车定位方式为:通过安装于车轮上的编码器转动时激发的脉冲数换算而获得距离测量。但由于编码器的长距离测量累计误差较大,难以满足收敛变形的测量精度。
本文提出编码器+图像特征高精度组合里程定位修正法,其定位修正步骤如下:
步骤1:利用检测车测距轮(内置高精度光电编码器)对里程L进行初步定位,并通过时间t将激光扫描数据S与L进行关联。
步骤2:利用数据S生成激光点云二维展布图,对展布图上的结构环缝、百米标、设备箱等特征点信息进行自动识别。当矿山法隧道无明显结构特征时,可以预先贴或刷一些定位标签,通过所识别的特征点信息反算对应的激光扫描数据Si(i为不同扫描点编号),并从预设的特征信息里程数据库中获得其真实里程Lr。
步骤3:通过Si可获得其对应的采集时间ti,通过ti进一步获得对应的测量里程Li,此时,将Li值取为Lr,期间里程数据按均一化进行修正。
步骤4:对各识别的特征点处的里程依据步骤2和步骤3进行逐一修正,则可极大地降低编码器距离测量误差,并消除距离测量累计误差,实现检测系统厘米级绝对定位和毫米级相对定位,其修正原理如图2所示。

图2 高精度组合里程定位修正误差示意图
1.3 激光扫描数据预处理
隧道激光扫描数据预处理主要包括噪点剔除、扫描点空间坐标转换及空间平面投影。
1.3.1 噪点剔除
受隧道内部线缆、照明系统、逃生平台、设备箱等因素的影响,在激光扫描过程中不可避免地会产生与隧道结构无关的噪点,如图3所示,噪点会直接影响隧道断面轮廓拟合的效率和精度。

图3 隧道激光扫描噪点示意图Fig.3 Diagram of tunnel laser scanning noise
为能有效地剔除扫描噪点,基于隧道结构特征和断面三维激光扫描仪工作特点,通过距离最小二乘法多次迭代进行单环扫描噪点剔除,最终实现整个隧道点云数据的除噪。
矩形隧道激光扫描噪点剔除示意图如图4所示。对于矩形隧道,通过距离最小二乘法对扫描点进行初步曲线拟合,并设定距离阈值DT,计算各扫描点距拟合矩形的垂直距离Di,并依据下式对扫描点F进行剔除,则有:
(1)
重复上述步骤,并调整距离阈值,如取DT的一半,再次进行噪点剔除,通过2~3次迭代即可。同理对于盾构隧道,亦可以通过圆或椭圆拟合方式进行多层次迭代噪点剔除(该方法的专利号为:ZL201810039089.0)。
1.3.2 扫描点空间坐标转换
利用隧道断面轮廓激光扫描点进行收敛变形检测时,需将扫描环上的各激光点转换到同一扫描空间平面内,扫描点空间坐标转换方法如下。
1) 取当前扫描环前3个扫描点组成一个空间平面,记为V,并构建直角坐标系T,如图5所示,其坐标原点为(0,0,0),坐标系Oxy位于平面V内。
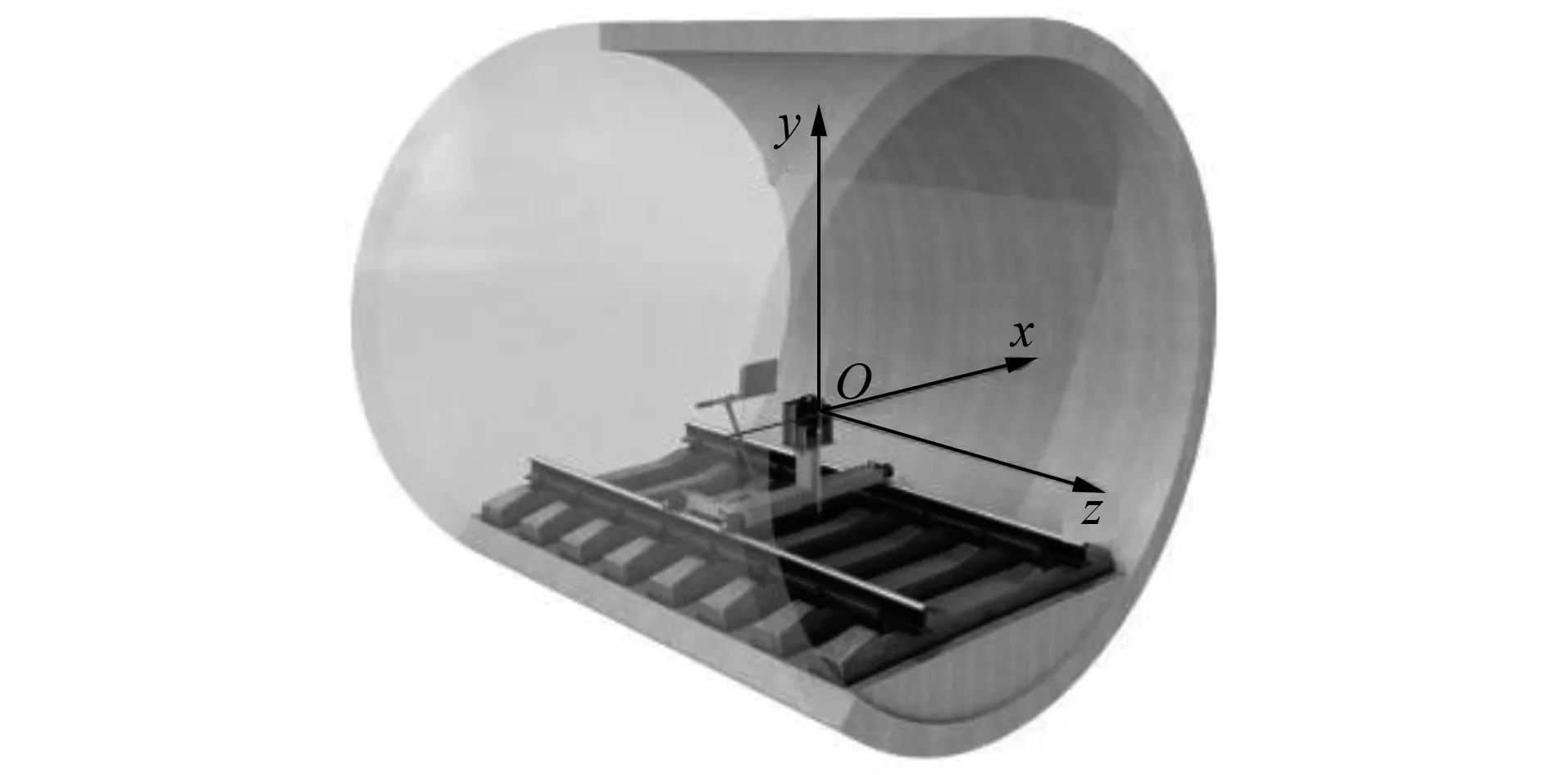
图5 激光扫描系统直角坐标系示意图Fig.5 Diagram of laser scanning system Cartesian coordinate
2) 扫描点通过坐标转换至直角坐标系T中,转换方法为:
(2)
式中:
(x,y,z)——旧坐标系激光点P的坐标;
(x′,y′,z′)——新坐标系(即激光扫描仪设备坐标系)激光点P′的坐标;
A——转轴变换系数矩阵;
B——平轴变换系数矩阵;
x0、y0、z0——平移变换矩阵系数;
α1、β2、γ3——新旧坐标系x轴、y轴、z轴之间的夹角,可以通过三轴动态倾角测量获得;
α2、α3、β1、β3、γ1、γ2——矩阵A中的对应系数,由α1、β2、γ3计算获得。
由于在实际激光扫描中,单激光扫描环的移动距离一般小于5 cm且沿轨道行驶,在较短的移动距离内A和B可进一步简化为:
(3)
(4)
式中:
ΔL——扫描点对应当前扫描环第1个点的扫描仪移动距离。
由于基于激光扫描点进行隧道收敛变形计算仅需用到激光点(x,y)坐标,且坐标系Oxy位于平面V内,故可令z=0,则式(4)可进一步简化为:
(5)
重复步骤2),可完成对当前扫描环后续激光扫描点的空间坐标转换。
1.4 隧道区段收敛变形分析
隧道结构一定区域(如纵向1 m环宽)或单环管片内会存在多个激光扫描环点云数据,如图6所示。通过对预处理后的每个激光扫描环点云数据进行曲线拟合并均值处理,可获得当前隧道结构区域内的曲线拟合参数。利用曲线拟合参数与隧道设计参数或前一次检测拟合的曲线参数进行比对,可获得当前隧道断面的收敛变形值。

图6 单管片环激光扫描示意图Fig.6 Diagram of single segment ring laser scanning
本文所提方法基于隧道一定区域内的激光扫描数据进行收敛变形计算,可反映结构的整体变形,并避免或减少单环扫描数据定位和拟合误差,有效提高隧道收敛变形计算的稳定性和精度。
2 检测装置及软件研制
2.1 检测装置研制
变形检测车如图7所示。集成上述成果,研制了地铁隧道变形检测车TDV-S3,主要由轨检小车和二维激光断面扫描仪Profiler 9012组合而成。Profiler 9012扫描仪测距分辨率为0.1 mm,旋转速度高达200 Hz,单圈扫描点数5 024个,数据采集可达百万点/s,可满足0~10 km/h的检测速度要求。检测车上搭载有动态倾角仪、编码器、测距轮、路由器、电池和计算机等设备。检测车的主要功能有:于轨道上均匀移动检测车对盾构隧道结构轮廓进行快速、非接触数据采集,点云数据用于隧道断面变形的检测。

图7 变形检测车Fig.7 Deformation detection vehicle
2.2 软件研制
基于上述研究成果,利用C++编程语言,开发了变形检测车配套数据采集和处理软件。数据采集软件主要用于控制各采集装置的数据采集和存储,并实时显示相关分析结果。数据处理软件的主要功能有:激光扫描数据自动解析,环缝自动识别,收敛变形分析,激光扫描二维展布图,三维隧道点云模型及检测报告自动生成等。
3 工程试验与应用
3.1 动态倾角仪测量精度试验
变形检测车对激光扫描数据进行预处理时,需要实时获得车体运动过程中的倾角数据,此数据可通过安装于车体内的动态倾角仪测量获得,其分辨力为0.01°。为验证倾角仪在移动过程中测量数据的稳定性,进行了实地测量试验。选取一段200 m长的废弃铁路轨道,每隔10 m做好标记,首先利用倾角仪对各标记点处进行静态测量,并记录数据;然后,检测车以5 km/h的速度进行动态测量,并自动获得各标记点处的倾角数据,将静态测量和动态测量的数据进行对比分析。
横滚动态测量与静态测量对比如图8所示。俯仰动态测量与静态测量对比如图9所示。横滚动态测量和静态测量的最大差值为0.046°,最小差值为-0.049°,差值均值为0.027°。俯仰动态测量和静态测量的最大差值为0.246°,最小差值为-0.184°,差值均值为0.06°。依据GB 50157—2013《地铁设计规范》:曲线最大超高应为120 mm(角度为4.78°),线路纵向最大坡度为4%(角度为2.29°)。可见,倾角仪动态测量的误差值均远小于上述规范规定值,满足检测车姿态测量的要求。

图8 横滚动态测量与静态测量对比图

图9 俯仰动态测量与静态测量对比图
3.2 检测车重复性试验
利用变形检测车对昆明地铁2号线2个区间共1 820个环管片,36 h内进行2次重复性测量试验,检测速度约为5 km/h。水平和垂直内直径重复测量差值柱状图如图10所示。由图10可知,水平内直径差值(单位:mm)落在[-1,+1]共计1 499环、落在[-2,+2]共计1 791环、落在[-3,+3]共计1 820环,分别占总环数的82.36%、98.41%和100.00%;垂直内直径差值(单位:mm)落在[-1,+1]共计1 309环、落在[-2,+2]共计1 697环、落在[-3,+3]共计1 800环,分别占总环数的71.92%、96.21%、98.90%。基本符合正态分布规律,复测精度为±2 mm,多数可达到±1 mm。试验表明:检测车测量系统和数据处理算法具有较高的稳定性和重现性。

图10 重复测量水平和垂直内直径差值柱状图
3.3 工程应用
利用研制的地铁隧道收敛变形快速检测车对昆明地铁3号线和6号线的区间隧道进行了多次全覆盖检测。通过检测车对昆明地铁3号线某区间隧道进行了2次检测,扫描间隔为3个月,第1次检测距隧道建成已5年(3号线开通运营1年多),隧道内直径为5 500 mm。激光扫描检测得到的年度水平收敛变形结果如图11所示。季度水平收敛变形δh结果如图12所示。
由图11可知,δh最大值为31 mm,97%的管片环δh值小于22 mm(直径变化量的4‰),位于22~33 mm之间的管片环数占比为3%,根据CJJ/T 289—2018《城市轨道交通隧道结构养护技术标准》可知,隧道管片变形健康度评定绝大多数为1级,少部分为2级,总体状况良好,对于健康度为2级的管片环,下次检查中可重点关注。由图12可知,该区段盾构隧道单个季度的收敛变形最大值为8 mm,总体位于[-5 mm,5 mm],由于检测时间间隔短,隧道结构变形基本无变化。

图11 隧道结构年度水平收敛变形曲线Fig.11 Curve of tunnel structure annual horizontal convergence deformation

图12 隧道结构季度水平收敛变形曲线Fig.12 Curve of tunnel structure quarterly horizontal convergence deformation
通过工程实际应用,检测车在移动检测作业中具有较高的检测精度和稳定性,可显著提升检测效率,并且其变形检测结果对隧道养护处治具有重要的参考价值。
4 结论
1) 依据激光扫描系统对隧道断面轮廓区段或管片环进行收敛变形快速移动检测,可同时兼顾检测精度和效率,是静态定点测量的有益补充。
2) 采用编码器+图像特征高精度组合里程定位修正方法,可实现检测系统厘米级绝对定位和毫米级相对定位。
3) 集成上述研究成果,研制了地铁隧道结构变形快速检测车,开发了配套数据处理软件,可自动进行数据预处理和计算分析,工程试验和实际应用结果表明:检测车系统采集精度为±2 mm,具有良好的稳定性和重现性,可满足隧道变形检测普查要求。
猜你喜欢
云南画报(2021年9期)2021-12-02
影像视觉(2020年4期)2020-05-09
中国外汇(2019年6期)2019-07-13
表面工程与再制造(2019年1期)2019-05-11
影像视觉(2019年3期)2019-04-20
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
制导与引信(2017年3期)2017-11-02
小天使·四年级语数英综合(2016年11期)2016-11-29
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
