
基于多元感知及数据融合技术的隧道安全监测与预警系统研究
2022-11-19 09:16李玉环李宇江胡翠云
现代信息科技 2022年19期
李玉环,李宇江,胡翠云
(广东飞达交通工程有限公司,广东 广州 510663)
0 引 言
根据国家统计年鉴及交通部的信息发布显示,到2021年底,我国高速公路隧道长度达到1.5 千米,广东省高速公路隧道达到1 000 公里。自2018年以来,交通部、交通运输厅等管理部门陆续出台7 项关于隧道安全、隧道设备数字化、隧道信息化管理的相关政策。与一般公路路段相比,隧道在空间结构、光线、通风、温度、通信等方面有其特殊性,所以保证隧道内设施设备、车流车速、环境因素正常是保证隧道安全通行的关键要素。传统隧道监测存在感知设备单一、多个系统独立、异常事件无法及时感知、应急处置无法互联互通等问题,在交通强国、智慧交通、隧道数字化及信息化管理的政策及行业背景下,开展基于多源感知及数据融合技术的隧道安全检测与预警系统研究。
1 设计思路
本研究在国家政策及行业需求的背景下立项,从隧道安全通行的智能化管理入手,对隧道的环境状态、设施设备运营、车行路况、突发事件等进行多元感知,获取环境数据、设施数据、设备数据、行车数据、事件数据,利用大数据技术将数据进行预处理、检测、融合,利用算法对多源数据进行融合、推理、态势预测。
2 系统架构
按照数据传输及控制逻辑,高速公路隧道安全监测与预警系统从下到上分为数据采集层、数据传输层、数据处理层、数据应用层、展示层。所有网络和设备均需进行网络安全管理。构成一个多元传感器获取数据、多源数据融合的功能架构,其数据和管理业务互相交叉共享,形成一个集视频调看、报警联动、设备巡检、风险预警、事后回溯跟踪于一体的平台系统。系统架构图如图1 所示。
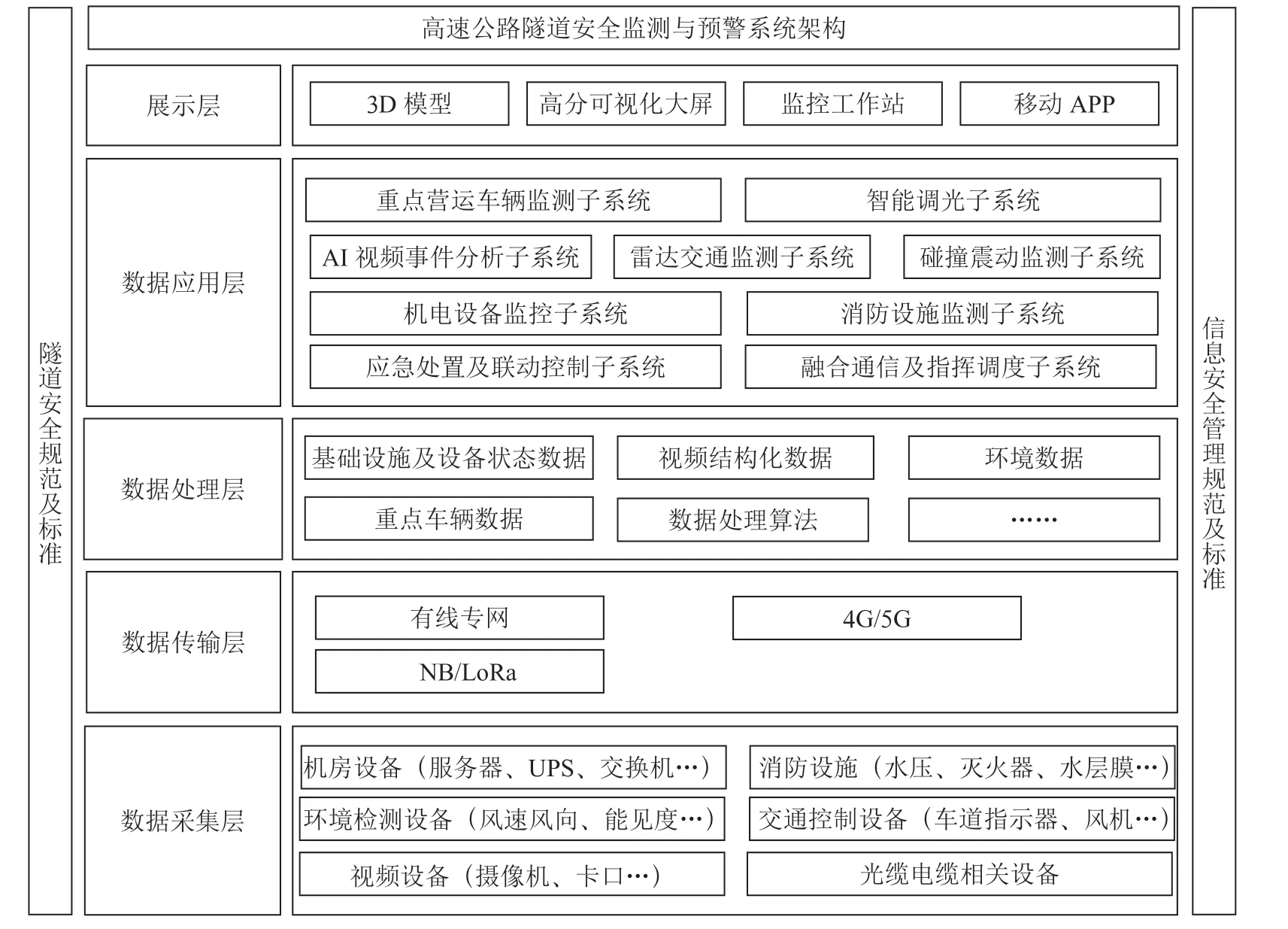
图1 系统架构图
3 多元感知数据来源及传感器管理
3.1 数据来源及类型
隧道内感知设备种类繁多,决定隧道内是否安全的要素,除了设施数据、设备数据、环境数据,还包含了动态的行车数据、事件数据等等,如果隧道内发生交通事故、火灾、危化品泄漏等事件,需要对隧道进行可视化监控,同时隧道内的感知设备能迅速识别并报警。所以保证隧道内所有设备的可用、可测、可控、可视对于隧道安全管理至关重要,隧道内数据包含静态数据,也包含了实时动态数据,设备设施的基本信息为静态数据,设备状态、车流、车速、事件等属于动态数据。从数据结构上来分设备数据、环境数据等属于结构化数据,视频数据属于非结构数据。
3.2 多元传感器管理
高速公路隧道内的感知设备包括环境设备、交通设备、照明设备、消防设备、监控设备、通风设备、标志设备、火灾探测报警设备等。多元感知设备类型及名称如表1 所示。
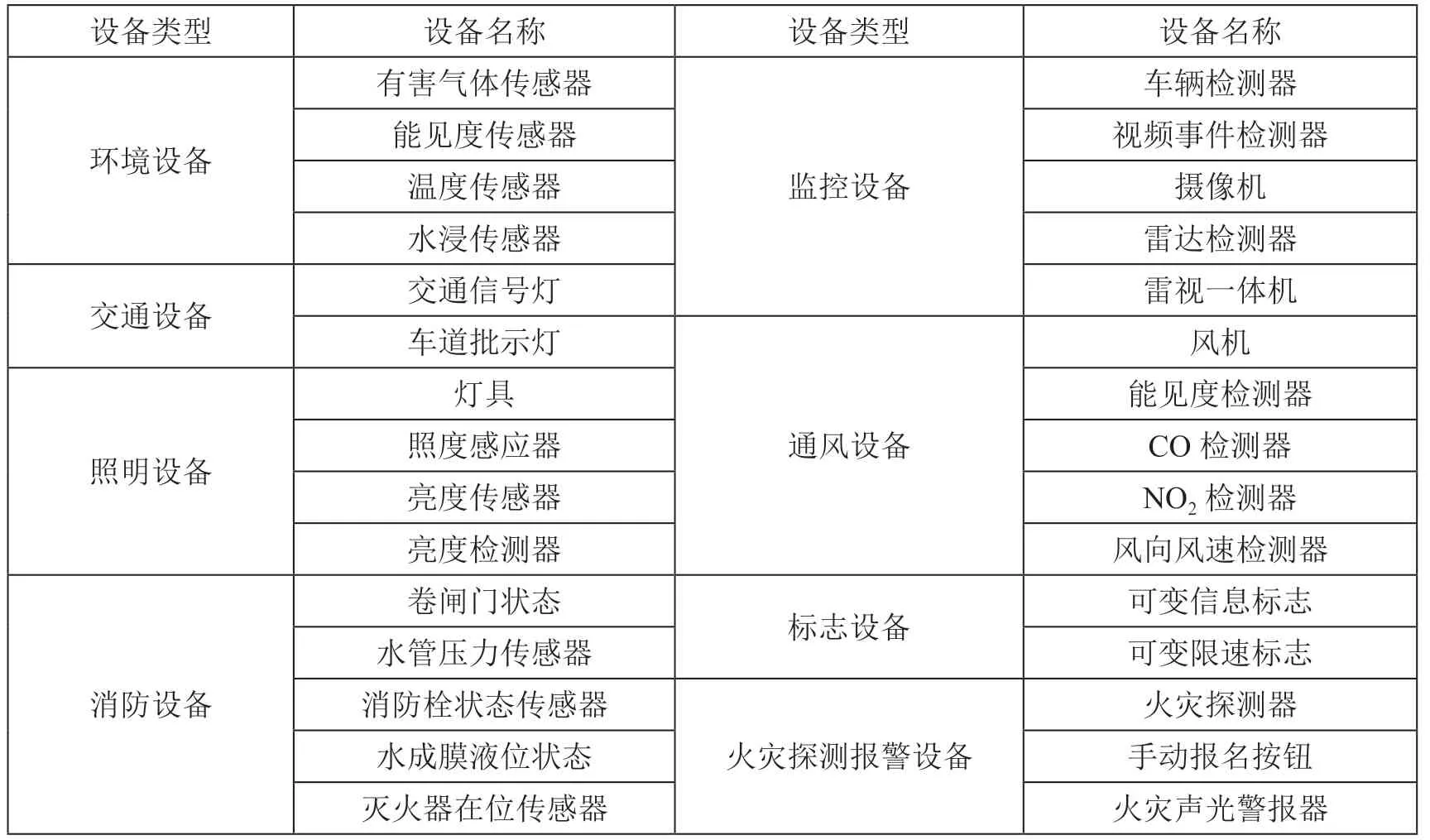
表1 多元感知设备列表
隧道内传感设备种类繁多,每个传感设备获取的数据都是独立的,为了使多传感器的数据能够有效融合,需要对多传感器在接口、操作方方法、使用环境、逻辑算法等方面进行约束[1]。所以传感器管理显得十分重要,隧道传感器管理是指在隧道环境的约束下,根据隧道安全管理和运营管理的具体要求任务以及最优原则,科学合理地协调、分配动态环境中有限的传感器资料,使隧道监测与预警系统能高效完成目标检测、数据采集与融合,充分发挥多元感知及数据融合的功能与性能,取得最优化结果[2]。
3.3 数据融合中的传感器管理
在隧道监测和预警系统中,传感器管理与数据融合是相辅相成的,传感器管理是数据融合的重要组成部份,传感器管理是为了更好地服务数据融合,而数据融合的结果又可以反馈给传感器作为管理依据。本研究采用的是美国国防部联合指挥工作组提出的传感器管理及数据整合的4 级闭环模型。4 级传感器反馈控制的闭环数据融合模型如图2 所示。

图2 传感器反馈控制的闭环数据融合模型
在这个模型中,分别由隧道环境、传感器子系统、数据整合子系统、传感器管理子系统、决策支持子系统组成,而决策支持子系统由态势估计及威胁估计两部分组成。传感器子系统通过隧道内的环境、温度、视频、消防等传感器获得隧道内静态及动态数据,将数据传输到数据融合子系统进行数据的处理及融合,数据融合的数据结果传递到传感器子系统,传感器子系统通过决策支持子系统的态势估计及威胁模型进行数据对比,将结果反馈到传感器子系统,对多元传感器进行有效的监测及预警,这样就形成了隧道多元感知的4 级闭环系统。
4 多源数据融合模型研究
国内外多源数据融合的方法很多,主流的有Bayes 方法(英国数学家Thomas Bayes 创立,主要是将归纳推理法用于概率)、Monte Carlo 理论(随机模拟方法,由美国物理学家提出)、Dempster-Shafer 证据理论(由Dempster 提出,由Shafer 完善,所以又称为D-S 理论),本研究主要根据隧道实际数据应用D-S 理论来研究数据融合。Dempster-Shafer证据理论的基本策略就是将传感器采集的数据进分成两个或以上的相互独立的子集,对子集数据结果进行独立判断,然后利用Dempster 将子集数据结果进行数据组合[3]。
4.1 隧道安全状态的评估与预测流程
隧道安全要素是由隧道内的环境、设备、设施、动态行驶车辆等因素决定的,主要方法是首先通过判断单个设备设施或行驶中的车辆状况产生的结果,再通过单个要素安全状况判断整个隧道安全状况。隧道安全状态评估与预测整体流程图如图3 所示。
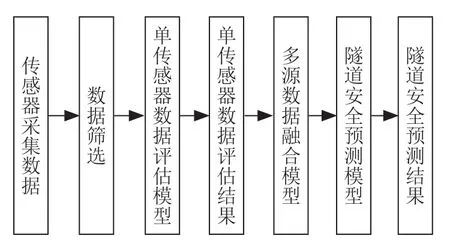
图3 隧道安全评估与预测流程图
在这个流程中,通过隧道内的各种感知设备获取隧道内静态及动态的实时数据,由于感知设备种内繁多、数据量大,产生大量的冗余数据,所以首先要先对数据进行筛选,筛选后的数据通过单传感器评估模型得到评估结果,通过数据融合模型、安全预测模型,最后得到整体隧道安全的预测结果,根据预测结果判断是否启动紧急预案。
4.2 Dempster-Shafer 数据融合模型
对于大部分的感知设备监测采用了多种指标的参数,目的是能够多方面监测设备,使得预测的结果更加准确[4]。但是对于多个指标数据,单独使用可能提现不了该数据的价值。因此,需建立一套多源数据融合模型以判断单个感知设备的健康状况。本研究拟使用D-S(Dempster-Shafer)证据推理方法,对多个指标参数进行融合判断,并输出一个结果。D-S证据理论的组合规则如公式1 所示。

其中,

其中K为归一化因子。
其方法步骤如下:
(1)数据融合,把监测到单个设备的多种数据通过特定函数进行目标合成,输出一个总的结果。
(2)推断,对上述输出的数据进行推断,推断出来的结果与设备状况相关。
输出结果的数值通过公式换算是的范围在0 ~100,其结果区间含义如下:
10 ~60:不合格,表示传感设备出现故障;
61 ~80:合格,表示传感设备有存在故障的可能性或者风险;
81 ~100:优良,表示当前传感设备运行状况良好,发生故障的可能性比较低。
5 隧道安全预测模型
通过对隧道内各单独传感设备运行状况的判断,可得到大量的设备运行状况数据,为了充分利用数据的价值,本研究拟使用人工智能技术对多元传感器采集的大量数据进行训练预测,获得各设备健康状况对整个隧道安全系统影响的权重值,建立隧道安全模型对整个隧道系统的安全状况进行预测,预测的结果同样公式换算成区间在0 ~100 数值,其数值区间含义如下:
(1)0 ~60:不合格,表示隧道安全系统出现故障;
(2)61 ~80:合格,表示隧道安全系统存在故障的可能性或者风险;
(3)81 ~100:优良,表示当前隧道安全系统运行状况良好,发生故障的可能性比较低。
将大量独立传感设备健康状况的结果数据输入到卷积神经网络中,如公式(2)所示,对数据进行学习,训练预测模型,并通过卷积神经网络的反向传播的特点,不断完善模型的准确度。

在卷积神经网络中,高层的特征信息比较抽象,在模型分类中起到重要的作用。但是,卷积神经网络的一个特点不仅仅是能够提取高层特征信息,还能提取底层,中层的特征信息[5]。因此,为了充分利用不同层次的特征信息,本研究将结合残差网络思想设计一种能提取多层次特征卷积神经网络模型,神经网络结构图如图4 所示。
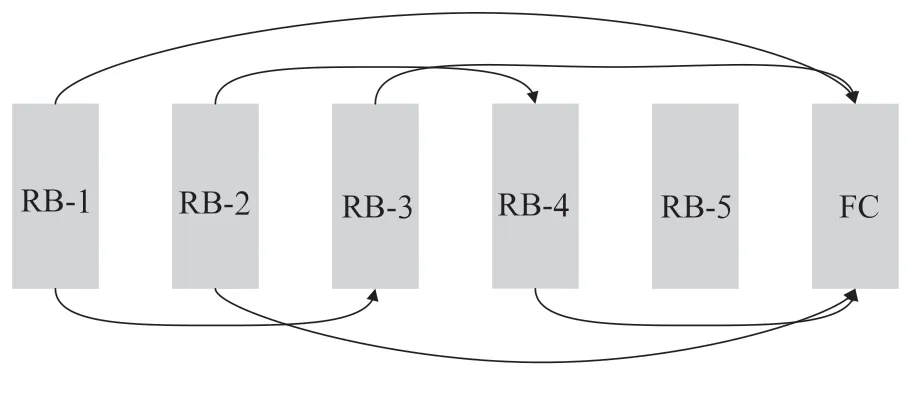
图4 神经网络结构图
通过对模型持续训练,最终获得一个最佳的预测模型,对输入数据可通过模型进行隧道安全状态进行监测,从模型训练的流程如图5 所示。

图5 模型训练流程
如图5 所示,获取单个消防设备的健康状态数据,将数据输入模型网络之前,需要设置参数,例如学习率,batch_size 等参数,输入数据训练后若模型收敛则训练结束,获得预测模型,并与之前训练得到的模型进行比较,通过不断调整训练参数获得最优参数权重值,以得到最佳预测模型。
6 案例应用成效
本研究是根据高速公路隧道安全管理的实际业务需求开展的,具体落地场景为广东省紫惠高速的好义隧道,紫惠高速起点位于河源市紫金县南部,与汕湛高速公路相接,连接河源、惠州两市。好义隧道单洞长1 700 多米,共有摄像机23 套、雷视一体机12 套、火灾探测器28 套、车道指示器36 套、交通灯2 套、风机27 套、卷帘门4 套、风速风向仪2 套、CO/VI 检测仪2 套、光强检测仪4 套、高位水池液位探测仪2 套、水泵4 套、消防柜117 套、水浸检测器2 套、照明控制器2 套。好义隧道于2020年12月建成并投入使用。
在本研究中,以好义隧道所有感知设备采集到的数据作为原始数据,通过研究中建立的模型对数据进行融合,通过模型的反复训练,判断隧道内所有感知设备的健康状况及对隧道安全进行预测,通过一年多的应用,取得了预期效果,大大提高了管理效率。
7 结 论
本研究从隧道多元感知设备的管理入手,通过传感器反馈控制的闭环数据管理,对传感感器采集到的数据进行处理,采用D-S 证据推理方法,建立数据整合模型及隧道安全预测模型,并将研究结果应用于实际案例中进行验证,取得了预期的效果,为工程上实际的隧道安全管理提供参考。但研究结果仅限于实际的物理空间的隧道安全管理,数字孪生需要进一步研究。
猜你喜欢
小学科学(2022年8期)2022-09-07
云南画报(2021年9期)2021-12-02
舰船科学技术(2021年12期)2021-03-29
汽车维修与保养(2021年8期)2021-02-16
时代英语·高一(2019年1期)2019-03-13
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
中国集体经济(2017年1期)2017-01-04
