
船载高频地波雷达目标方位校正的时域DBF方法❋
2022-11-15 09:48杨开先武茂凯
中国海洋大学学报(自然科学版) 2022年11期
杨开先,牛 炯,张 玲,武茂凯
(中国海洋大学工程学院,山东 青岛 266100)
高频地波雷达具有可全天候工作、超视距探测等优点,因此在监测专属经济区、保护海洋环境等方面得到了越来越广泛的应用[1-2]。相比于岸基雷达,船载高频地波雷达不仅包含了其大部分功能,还具有更好的灵活性[3],探测范围也更广,因而有着更好的发展潜力[4]。然而,船载平台的运动会造成海杂波和目标点在距离和多普勒向上展宽和偏移。相比于岸基雷达而言,船载地波雷达受平台空间所限,阵元个数少且排列更加紧密,阵列更加小型化。孔径的减小降低雷达分辨率,大大降低了信噪比,使得距离多普勒(RD)谱图更加杂乱[5]。这些因素都严重影响了目标参数估计的精确度,因而需要对船载高频地波雷达的目标检测方法进行研究。
2020年,Yang等[6]做了对船载平台的6自由度(6-DOF)运动的建模和平台运动对船载高频地波雷达检测船只目标参数(距离、速度和方向角)的校正和分析,然而从处理结果来看,目标距离和速度都可以做到很大程度的补偿,但是角度的精度不高。考虑到第二次快速傅里叶变换(FFT)会对雷达数据做相参积累,同样的,测向误差在此过程中也会被积累。因此,对目标方向角做补偿造成很大的困难。文献[6-7]中提到了频域做处理的办法,取偏航角度的加权平均值对频域DBF求得的方位角结果做粗略的修正,这种方法在平台做匀速偏航的情况下效果尚可,但船只偏航很难做到严格意义的匀速偏航,且船只前行过程中包含艏摇。因此,为了更准确地与惯导数据同步,实现船载高频地波雷达方位角的精确补偿,采用在时域做数字波束合成(DBF)处理的方法,避免第二次FFT的相参积累对误差的累积。
1 问题描述
高频地波雷达船只目标参数求解的过程通常采用如下几个步骤[8-9]:(1) 通过一次傅里叶变换解出船只目标所在距离;(2) 通过二次傅里叶变换解出船只目标的径向速度;(3) 基于恒虚警检测的结果对目标进行测向,通常在频域进行。对于岸基雷达,由于探测环境平稳,时域测向和频域测向结果一致,而对于船载地波雷达,由于平台晃动,在频域测向的误差较大,因此需要在时域进行测向。本文比较了时域补偿和频域补偿测向的方法及实验结果。
2 时域数据DBF补偿方法
这里结合不规则阵列[10],假设N根接收天线无规则地摆放在同一平面内,对于来自远场的独立来波信号s(t),阵元的坐标分别为(xk,yk),k=1,2,3,…,N。选择第一根天线单元作为位于原点的参考阵元,结合船载6自由度运动的方向矢量[6]可写做:
(1)
以一个相参积累时间内的数据为例,设θ0为初始时刻目标来波方向,φ(t)为每一采样时刻与相参积累初始时刻的航向角偏差,则θ(t)=θ0+φ(t)为每一时刻的来波方向。阵列的接收信号可表示为:
x(t)=α6-DOF(t)s(t)+n(t)。
(2)
(3)
对上述时域信号x(t)进行DBF处理,输出y(t):
y(t)=wTx(t)。
(4)
取w为式(1)中的方向矢量,β为此空域滤波器的角度自变量,取值范围为[-48°,+48°]。对上式进行求模,可得空域滤波器的输出:

(5)
对上式归一化,则有:
(6)
对上式的输出做傅里叶变换,即可得到波束频域数据。随着方位角β的变化,权矢量w也在不断变化,当β取θ0时,来自来波方向上的信号相位全部被补偿,此时输出信号增益最高,波束形成的输出最大,由此可以得到来波信号的方位角。利用时变的导向矢量对回波信号的相位进行修正,可以精准地补偿偏航、艏摇和前向运动等产生的角度偏差。
3 方法流程
时域DBF补偿方法的流程如图1所示。取雷达信号接收原始数据,信号形式见式(2)所示,按照图1所示步骤进行处理。
步骤一:对原始数据做去斜、混频等预处理。
步骤二:对处理后的原始数据做第一次快速傅里叶变换得到时域通道数据。
步骤三:令w=α6-DOF,用有6-DOF的方向矢量作为空域滤波器的权值w来对时域的通道数据做DBF,如公式(4)所示。
步骤四:对空域滤波器输出做归一化处理,见式(5),可以得到归一化的时域波束数据。
步骤五:对时域波束数据做第二次快速傅里叶变换得到频域波束数据。如此,可以将每一采样时刻的平台运动对测向带来影响的部分做出补偿。
4 方法验证
4.1 仿真实验
这里对频域和时域两种方法进行对比仿真,仿真条件:目标位于平台-45°方位,距离40 km。平台前向运动速度5 m/s,偏航角度为5°或0°。
图2对平台有、无偏航分别作频域DBF得到波束方向图结果的比较。其中,蓝线表示无偏航情况,红色虚线表示平台在一个相参积累周期内匀速偏航5°的情况。从图中可知,当平台无偏航时,DBF的仿真结果为45.2°,当平台匀速偏航5°时,DBF测向结果为47.6°。由于仿真中偏航运动是匀速偏航,相参积累近似于对偏航的角度取平均,即2.5°,叠加在初始的来波方向角上,该结果与图2的结果相一致。图2的结果也验证了当平台匀速偏航时频域补偿方法的可行性。
图3为当平台匀速偏航5°,经过时域DBF补偿方法的补偿结果。由图3可知,经过补偿,DBF的测向结果为45°,与仿真预设的目标方向一致。
为了更加充分地对照时域和频域方法的补偿效果,表1统计了在多种偏航的情况下,时域DBF(TDBF)和频域DBF(FDBF)的补偿结果。
从仿真效果来看,当平台均匀做偏航运动时,时域补偿与频域补偿两种方法都可行,但当平台变速偏航时,时域补偿比频域补偿明显具有更好的效果。

表1 仿真多种偏航的补偿效果比较Table 1 DOA detection results under several kinds of yaw motions (°)
4.2 实测数据测向与AIS验证
实测数据于2019年7月21日在威海近海位置采集,雷达工作频率为4.7 MHz,相参积累时间(CIT)为131.072 s。安装在货船上的惯性导航系统(INS)同步记录平台运动信息,可以用做检测结果的补偿。自动识别系统(AIS)配合全球定位系统(GPS)提供海面船只的船位、船速、及航向等信息,可以用来验证雷达目标测向的准确性[11-12]。
由于AIS数据提供的船只位置为地理坐标系的经纬度而非雷达坐标,因此要用AIS数据求出船只目标的真实距离和径向速度,并将其投射到雷达回波数据的RD谱上,使AIS数据与雷达坐标相匹配。图4为某一批数据的AIS匹配结果。具体匹配方法如下,首先基于恒虚警率检测(Constant False Alarm Rate,CFAR)圈出RD谱中的疑似目标点,再通过点迹关联来确定真实目标[13-14]。将检测结果与AIS数据进行比对,进而确定目标,以此来确保找到的目标点的可靠性。惯导数据的使用过程中,由于船载地波雷达惯导数据的采样时刻与雷达相参积累时刻不一致,因此还需要对惯导数据进行插值处理,使得姿态数据尽量匹配雷达目标参数。这就是船载高频地波雷达数据的处理方法。之后用处理过的AIS和雷达数据来做测向对比实验。本文作者主要验证时域DBF的处理效果,并与频域处理方法加以对比。分别用时域DBF和频域DBF两种方法求解目标方位角。
从图4的RD谱中可以看到,船载数据的RD谱杂波展宽范围较大。因此,实验验证的目标选取需要避开大范围杂波区域,包括RD谱中部的射频干扰,以及位于零频点的地杂波等。而海杂波几乎是不可避免的,从图中可以看到海杂波几乎覆盖了船只可能出现的频点。此外,高频地波雷达方位角检测范围为-48°~48°,超出此范围检测,方位角精度不高。因此,数据遴选范围为单元格9~45和80~110;角度范围-48°~48°。分别求2种方法得出的角度与真实角度的绝对值误差。
表2~4分别为横纵坐标位于(39,98)、(27,102)、(88,124)3个目标点,批次2~7,共6个批次的跟踪结果。表中分别列举了未经过补偿、经过频域方法补偿(FDBF)和经过时域方法补偿(TDBF)3种情况的测向结果和误差情况,最后求取了6批次数据测向结果的平均绝对误差(Mean Absolute Error,MAE)。在整个数据采集的过程中,第3个相参积累周期(第三批次数据)中船载平台存在偏航运动,其他批次数据的平台运动状态为直线行驶。
从以上3个目标的处理结果来看,偏航运动对于普通频域DBF测向方法影响严重,第三批未补偿的FDBF目标点一的测向误差为14.92,目标点三为11.4。由于平台的偏航运动近似匀速偏航,因此在频域采取平均值的补偿方法效果尚可,而时域DBF的补偿方法效果最好。
图5(a)、(b)分别为频域、时域两种方法处理所得到的波束RD谱,波束方向-28°,来自第三批数据。从图5可以看到在图5(b)中能够观测到一些在图5(a)中能量较弱的点,对比同一批次的AIS匹配图,如图4,可知这些点确实为目标点。

表2 目标点一的测向补偿结果Table 2 Direction compensation result of target No.1
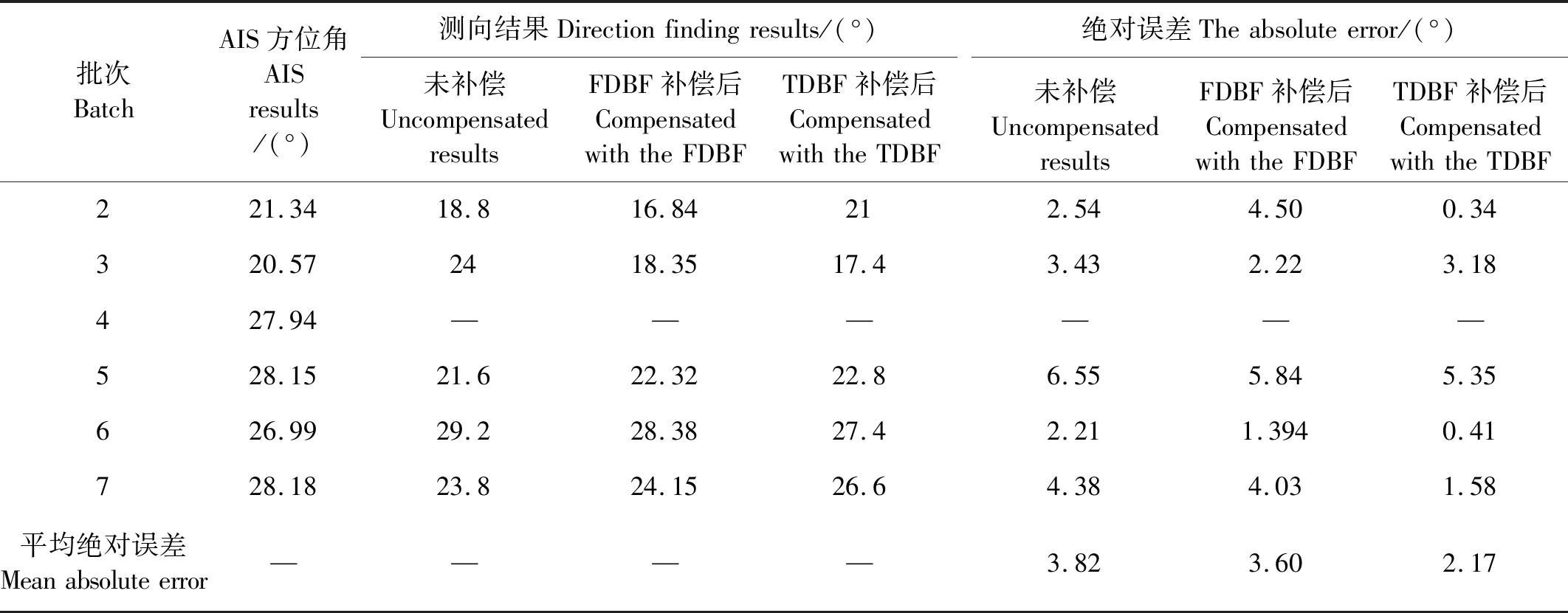
表3 目标点二的测向补偿结果Table 3 Direction compensation result of target No.2

表4 目标点三的测向补偿结果Table 4 Direction compensation result of target No.3
5 结语
本文提出了在时域DBF中对船载地波雷达目标测向进行补偿的方法,并进行了仿真和实测数据验证。模拟来波数据的仿真结果表明,本文方法能够精确求得来波方向,比频域的补偿方法具有更高准确性,也更适应复杂时变的实际情况。在时域的方法补偿中,补偿可以在每个时刻不仅对偏航艏摇,还可以对其他可能对回波信号造成角度偏差的前向运动等做出补偿。
从地波雷达实测数据的测向处理结果可以得出,与频域处理方法相比,时域处理方法没经过相参积累处理,因此总体信号能量降低,从而信噪比也相应减小了。但时域处理方法却能够更加细致地对方位角做补偿,求得的方位与AIS方位误差较频域DBF更小,准确性更高,具有一定的实用性。
猜你喜欢
电声技术(2022年7期)2022-09-23
哈尔滨工程大学学报(2021年10期)2021-11-05
成都信息工程大学学报(2021年1期)2021-07-22
大众投资指南(2020年10期)2020-07-24
军事运筹与系统工程(2019年4期)2019-09-11
宇航计测技术(2019年1期)2019-03-25
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年3期)2017-11-23
人生十六七(2016年14期)2016-12-01
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
