基于模糊控制实现采煤机的自动化调速控制
2022-11-12 08:48段兴尧
机械管理开发 2022年10期
段兴尧
(山西新景矿煤业有限责任公司, 山西 阳泉 045000)
引言
由于煤矿井下工作环境特殊、采煤机自动控制技术仍不成熟,当前对采煤机的截割路径、滚筒转速以及推进速度判断等都需进行人工控制。然而在煤矿井下实际开采过程中,经常出现因煤尘浓度高、工作环境视野范围差影响采煤机司机判断的情况,采煤机作业路径偏差、切顶等事故也时常发生,难以保证采煤机的截割效率,同时也无法确保采煤机司机安全工作。本文基于综采工作面采煤机人工作业现状,通过模糊控制实现采煤机的自动化调速,进而实现采煤机综采智能化作业,达到高效安全开采的效果。
1 采煤机截割状态分析
采煤机截割过程中,煤层的直接受力部位为采煤机截割滚筒。采煤机滚筒通过改变截割电机截割转矩力的大小来调节对煤壁的截割状态,从而进行煤壁的截割作业。采煤机滚筒控制方式有两种,分别为横向和纵向,如图1 所示,其作用力的大小为:
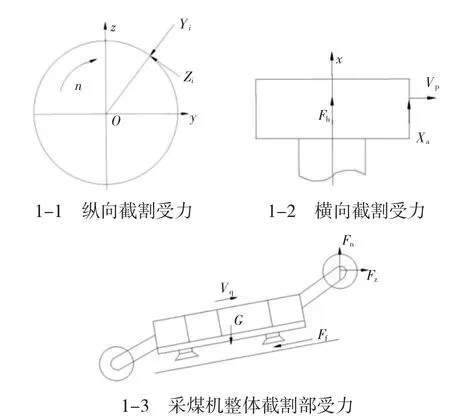
图1 采煤机截割作业受力分析简图
式中:Fh为采煤机截割电机作用在横轴上的截割力;n为截割过程中截齿的数量;Xa代表第a 个截齿所承受的横向分力的大小,求和计算则为总的横向合力;Fz为截割电机的纵向分力和,通过对每个截齿的分力总和进行矢量叠加计算得到;Fn代表截割电机在纵向的截割分力和;βa为截齿的方位角;Za为a 个截齿受到的摩擦阻力大小;Ya为采煤机截齿的工作阻力大小,分别同正弦值、余弦值相乘后进行求和计算可以求得总摩擦力大小。
通过上述对采煤机整体截割作业时的受力情况进行分析,可以看出在采煤机推进过程中,采煤机滚筒的截割速度以及采煤机的推进速度,总会受到截割煤壁时产生的摩擦阻力的影响,因此设想通过研究采煤机截割阻力与采煤机推进速度及采煤机滚筒截割速度之间的关系,可以起到对采煤机作业速度进行灵活调节的效果。通过对综采工作面采煤机推进过程中的牵引速度以及滚筒截割速度进行参数收集,并利用压力传感器收集采煤机截割煤壁时的工作阻力参数来进行截割负载与截割参数的优化设计。
2 截割负载与截割参数优化设计
综采面采煤机的截割作业过程中,影响采煤机推进速度以及采煤机滚筒的截割转速的主要原因在于对煤壁截割时产生的截割阻力,这也是截割负载中最大的影响因素。而截割阻力直接影响着采煤机的推进速度以及采煤机滚筒的截割速度,也就是对采煤机截割电机的电流波动产生影响。因此通过设计截割电机工作时的电流波动效果来分析截割煤层过程中受到的截割阻力的大小,对提高采煤机截割电机的稳定性以及综采效率有着显著效益。而对采煤机截割电机的优化控制,即可以实现采煤机滚筒截割速度以及采煤机推进速度的优化调节,具体研究结果见下图2 所示。
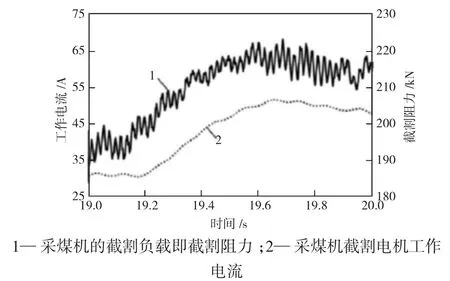
图2 采煤机滚筒截割阻力与截割电机电流值关系示意
由图2 中截割电机电流变化情况与截割煤壁过程中受到的截割阻力情况进行对比可以看出两者具备一定的相关性,因此设想通过设定一定的截割阻力范围,对采煤机截割电机工作过程中遭受到的截割阻抗大小的不同即截割阻力的变化情况进行自动识别,通过自身所处的截割阻抗范围自动调整采煤机滚筒的截割速度以及采煤机的推进速度,实现采煤机的自适应控制效果[1]。具体设计为利用采煤机截割电机在不同截割阻力下的工作状态进行数据收集,设计出不同阻力状态下采煤机截割速度以及采煤机推进速度的最优截割参数,通过这种不同阻力下的工况进行截割控制系统的自动调整,设计出合理的截割速度以及推进速度。
3 基于模糊控制下的采煤机自动调速设计
3.1 模糊控制系统构成
采煤机的截割模糊控制系统构成为三大部分,即模糊控制器、采煤机截割推进电机以及速度调节器。模糊控制器为核心部分实现对采煤机滚筒截割速度以及推进速度的自动化调节,主要由模糊化模块、模糊控制依据算法以及决策模块三部分组成。其中模糊化模块即对控制输入量的参数进行设定存储;模糊控制的依据算法是通过设计的采煤机截割煤壁工作阻力的阻抗范围,实现对采煤机滚筒截割速度以及采煤机牵引速度的调节;决策模块是通过工作阻抗的调节量输出具体的参数调节值,从而实现对采煤机工作速度的调节效果[2]。
为实现上述截割控制系统进行自动化操控的效果,基于井下复杂的工作环境影响,利用模糊控制器来实现控制系统对截割速度以及推进速度的自动化调节。通过采煤机截割电机截割作业时的设计转速与实际工作过程中转速的误差值进行差值计算,将这一差值作为模糊控制系统的输入变量,经过模糊控制系统进行推导计算后,对输入的截割速度以及推进速度的参数量进行优化调整,从而实现截割控制系统的优化精确控制效果,具体操作如图3 所示。通过对采煤机的实时工况进行数据收集,通过模糊控制器利用截割阻力范围对输入变量进行调整,从而输出调整后的参数实现对采煤机作业速度的自动化调节效果。
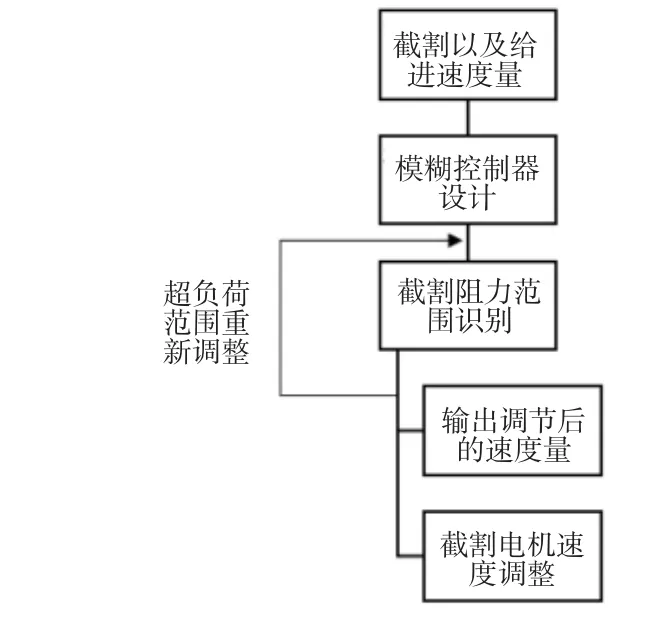
图3 模糊控制下的自动截割调速流程图
3.2 截割效果仿真模拟
为确定模糊控制设计对采煤机滚筒截割速度以及采煤机牵引速度的调节效果,现对设计完成后的采煤机截割速度自动调节模糊控制系统进行试验验证,具体验证结果如图4 所示,通过利用不同阻力下模糊控制器的自动调速实际效果来验证系统的控制性能。可以看出,在截割阻力未变化的前20 s 内,采煤机滚筒的截割速度以及推进速度均未发生变化;在20 s 之后采煤机的截割阻力增大,而采煤机的推进速度在30 s 后也随之降低,呈现了一段时间的滞后性,而采煤机截割滚筒的截割速度则在20 s 后同步降低。因此基本可以确定模糊控制的可靠性,可以在保证采煤机截割作业稳定性的前提下实现对采煤机作业参数的灵活调节,提高综采工作效率。
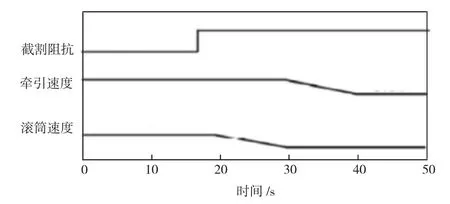
图4 采煤机截割速度及给进速度随截割阻力变化示意图
下页图5 为采煤机在超载欠载下的工作曲线图由图5 可知,采用模糊控制系统对采煤机的推进速度以及滚筒截割进行自动化控制,基本可以实现取代人工操作的效果。在超载作业工况下或欠载工况下模糊控制的调节速度要明显高于人工控制,可以实现对细微工作阻力的灵敏捕捉实现对采煤机作业速度的灵活控制,使用效果显著[3-4]。
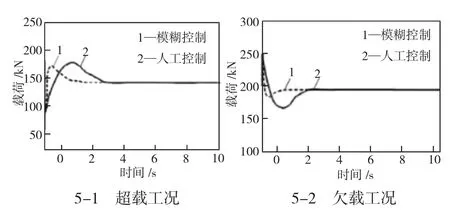
图5 采煤机在超载欠载下的工作曲线图
4 结语
本文通过对采煤机截割作业时的几种截割状态进行研究,得出控制截割作业的关键因子,即截割阻力对截割速度以及采煤机推进速度的影响。以截割电机作业时的截割速度以及采煤机推进速度的初始值做输入变量,通过模糊控制器利用截割阻抗范围实现对输入参数的调整,从而达到对截割电机的优化调速目的,并通过仿真模拟实验成功实现模糊控制系统对采煤机截割作业的调速优化控制,起到了采煤机自动化、智能化作业效果,对煤矿产业智能化、高效化发展具有重大意义。
猜你喜欢
防爆电机(2022年1期)2022-02-16
河北画报(2021年2期)2021-05-25
煤炭工程(2020年12期)2020-12-22
煤炭工程(2020年8期)2020-08-27
机械管理开发(2020年4期)2020-06-10
煤矿安全(2020年4期)2020-04-24
电子技术与软件工程(2019年15期)2019-12-03
中国工人(2016年7期)2016-08-16
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17