
基于克隆免疫决策的无人机集群协同探测跟踪*
2022-11-12 11:08周方宇周洁陈超波高嵩
现代防御技术 2022年5期
周方宇,周洁,陈超波,高嵩
(西安工业大学,陕西 西安 710021)
0 引言
面对未来空中作战环境的日益复杂与多任务作战需求,无人机集群作战显现出独特的优越性[1],具有作战效能高、任务完成率高、作战成本低等特点[2],并能有效避免单无人机任务执行受限等问题,是未来空中作战的重要形式之一。无人机集群作战是指利用大规模具备自主能力的小型无人机进行协同作战,这些无人机利用传感器获取环境态势信息,并通过与周围无人机个体信息交互实现集群感知与态势共享,进行快速决策响应[3]。无人机协同搜索作为无人机集群作战的重要组成部分,其核心思想是协同控制方法。
传统的协同控制方法主要有领航-跟随法、虚拟领航法和人工势场法[4]等方法。在较为复杂的战场环境下,这些方法均存在着一些致命的缺点。例如,领航-跟随法[5-7]对于领导者的运动较为依赖,一旦领导者故障,整个编队系统将会瘫痪;虚拟领航法[8-9]有效地避免了领航-跟随法的这个缺点,但对集群系统的实时性、通信感知能力要求较高;人工势场法[10-11]则容易产生局部振荡等问题。
随着仿生学理论的发展,许多专家学者将仿生学思想应用在无人机集群协同控制中。张岱峰等[12]针对感知范围受限下的无人机集群合围控制问题,提出了一种分层结构的狼群交互动力学模型,利用空间概率分布实现了分层交互势场的自适应强度调节。该算法保持了较好的合围编队稳定性,且对机载感知能力的要求更低,因而适用于较为恶劣的任务环境。周贞文等[13]针对多无人机对入侵飞行器的协同追踪围捕控制问题,将自然界中生物群落在捕捉猎物时展现的逃逸-围捕策略引入到多无人机协同作战研究中,设计了一种多无人机协同围捕逃逸目标策略。通过仿真验证策略在多无人机围捕和阻止目标逃逸场景中的可行性与有效性。霍梦真等[14]针对无人机目标搜索问题提出了基于自适应变异的多目标鸽群优化算法,提高了无人机目标搜索的效率。
针对上述算法存在的易陷入局部最优解、集群响应速度慢等问题,一些学者考虑将免疫学方法引入无人机集群协同控制问题中。周洁等[15-16]提出了一种基于传染-免疫仿生模型的无人机集群协同探测及跟踪策略,该算法在实现无人机集群对目标的探测基础上,有效地提高了集群应对外界刺激时的响应速度。Weng 等[17]针对无人机群体协同跟踪问题,提出了胸腺增强静态策略人工免疫方法(thymus enhancement static strategy artificial immune system,TE-SS AIS),实验结果表明,该方法在动态变化的环境下,能够实现对目标的有效跟踪,但随着信息超载效应的增加,该方法跟踪成功率明显下降。针对该问题,Stogiannos 等[18]提出了一种基于人工免疫系统的增强分布式可变策略的集群控制方法(enhanced decentralized variable-strategy algorithm based on artificial immune system,ED-VS AIS),通过将可变策略池思想引入标准的基于人工免疫系统(AIS)的分布式方法中,避免了集群选择无效策略的可能性,并与静态策略人工免疫方法(static strategy artificial immune system,SS AIS)、胸腺增强静态策略人工免疫方法(TE-SS AIS)、集中式粒子群方法(PSO)进行了对比,实验结果表明,在跟踪性能方面,ED-VS AIS 优于 TE-SS AIS 和 SS AIS,具有接近PSO 的跟踪性能,算法运算时间仅为PSO算法运行时间的1/10 左右,略高于TE-SS AIS 和SS AIS 方法,能够实现较为不错的跟踪效果,但随着无人机集群数目的增多,存在集群聚集导致遗漏目标的情况。
综上所述,在无人机集群感知范围受限,进行局部信息交互情况下,研究无人机个体的决策机制,对于保证集群整体资源的合理调度,提升无人机集群探测跟踪目标性能,具有一定的推动作用。据此,本文提出了一种基于人工免疫系统的克隆选择-传染免疫的集群控制策略方法(clonal selectioninfection immune algorithm based on artificial immune system,CS-II AIS),设计了无人机决策激活机制,在提高无人机发现跟踪目标能力的同时,确保集群资源的有效调度;构建了无人机策略决策机制,保证无人机进行合理的策略选择;引入“过热”策略判断机制,避免集群聚集情况的发生。最终实现无人机集群资源更加合理的调度,为无人机集群在高动态的复杂战场环境下提供新的探测与跟踪目标方法。
1 问题描述
1.1 任务假定
针对无人机集群协同探测与跟踪问题,本文假定无人机集群作战任务为:在特定区域内,一组无人机正在执行巡逻任务,另一组目标无人机进入该区域,个体的任务是实现探测并跟踪目标。具体来说,个体需完成2 个任务:①实现对尽可能多的目标跟踪;②保持尽可能高的探测区域覆盖面积。
1.2 基本假设
(1)集群内无人机通信低延迟、无干扰,确保任务的时效性需求,无人机通信区域为半径为Rcom的圆。
(2)集群内无人机均搭载雷达定位系统,可获得探测区域内目标无人机位置,无人机探测区域为半径为Rdet的圆。
(3)集群内无人机具有感知决策能力,可通过通信交互及雷达探测实现自主避障功能。
1.3 基本策略决策
将每个个体在单位时刻上可选策略的集合定义为策略池[18],为实现无人机集群协同探测跟踪,假定在单位时刻,个体将在各自策略池中选择合适策略执行。策略池表达式表示如下:

其中,个体策略类型可分为“巡逻”和“跟踪”两大类。定义R 为“巡逻”策略,表示个体在区域内随机漫游;定义Ti为“跟踪目标”策略,下标i 表示目标编号。设置个体初始时刻执行“巡逻”策略,进行区域内随机漫游;为避免无人机跟踪无效目标情况的发生,设定个体策略池时刻更新;“巡逻”策略始终在个体的策略池当中,当个体探测或接收到目标信息时,个体的策略池中将出现“跟踪”该目标的策略。
图1 描述了个体探测跟踪目标的所有情况,所有个体初始时刻策略池策略为“巡逻”策略,个体探测跟踪目标情况可分为3 个类型。图1 个体策略池策略情况如表1 所示。
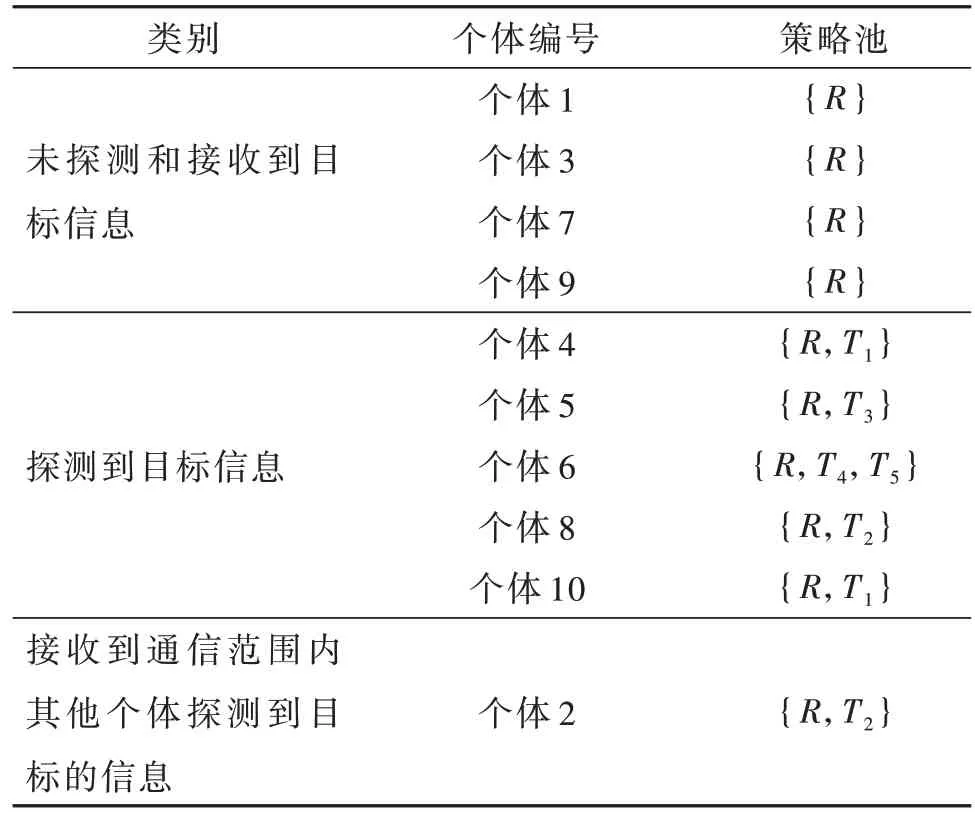
表1 图1 个体策略池策略情况Table 1 Figure 1 individual policy pool policy situation

图1 单位时刻个体探测跟踪目标情况图Fig.1 Unit time individual detection and tracking target situation diagram
(1)未探测和接收到目标信息
当个体未探测到目标并且未接收到其他个体探测到目标的信息时,个体策略池策略为“巡逻”策略。
(2)探测到目标信息
当目标被个体探测到时,个体将更新策略池(增加跟踪该目标策略)。
(3)接收到通信范围内其他个体探测到目标的信息
当个体接收到通信范围内其他个体发送的探测到目标的信息时,个体将更新策略池(增加跟踪该目标策略)。
2 克隆选择-传染免疫模型
模型实现主要分为传染免疫和克隆选择2 部分,构建传染免疫模型实现无人机集群的决策激活机制,构建克隆选择模型实现无人机集群的策略决策机制。本文将无人机集群作战系统(UAV cluster combat system,UAV-CCS)与传染免疫系统(infectious immune system,IIS)进行类比,介绍传染免疫模型部分(见表2),将无人机集群作战系统(UAVCCS)与免疫系统(immune system,IS)进行类比,介绍克隆选择模型部分(见表3)。设置当个体i 病毒量超过病毒量阈值时,个体i 触发策略决策机制,计算策略池策略强度,选择最优策略执行,个体执行的策略将影响集群整体的分布变化,从而反作用于集群的策略激活机制。

表 2 UCCS 和 IIS 类 比 关 系Table 2 Analogy relationship between UCCS and IIS

表 3 UCCS 和 IS 类 比关 系Table 3 Analogy relationship between UCCS and IS
2.1 传染免疫模型构建
通过对传染病流行过程的研究分析可知,个体染病源于直接感染和交叉感染。直接感染指免疫缺失的个体接触到0 号感染者并被染病的过程。在该过程中,个体将被0 号感染者传播一定病毒量,所含病毒量越高,则代表感染程度越重,当个体所含病毒量超过感染阈值时,个体染病,并成为交叉传染源。交叉感染指免疫缺失的个体接触到交叉感染者并被染病的过程。同样,在该过程中,个体将被交叉感染者传播一定病毒量,当所含病毒量超过感染阈值时,个体染病,成为交叉感染者。
基于此,构建无人机集群的决策激活机制,该决策激活机制主要由直接感染机制、交叉感染机制两部分构成。
2.1.1 直接感染机制
将所有目标视为0 号感染者,将所有个体视为易感个体,当0 号感染者出现在个体的探测半径内时,个体将存在被直接感染风险。因此,可定义直接感染概率表达式:

式中:Pdiri(t)为个体i 在t 时刻下的直接感染概率;Dij为个体 i 和 0 号感染者 j 之间的距离;Rdet为无人机探测半径;Pd为有0 号感染者出现在个体探测半径内时个体的直接感染概率;Pf为个体探测半径内无0 号感染者,个体由于某种未知因素直接感染概率。在无人机协同探测跟踪中,Pd表示有目标出现在个体探测半径内时,个体发现目标的概率;Pf表示个体受未知信号干扰,误判探测范围内存在目标的概率。
当个体被直接感染后,即个体被0 号感染者传播一定量的病毒,定义直接感染传播病毒量为

式中:Vjdir(t)为0 号感染者j 在t 时刻下直接感染传播给个体i 的病毒量,其中病毒量设置为定值Kd,在无人机协同探测跟踪中,当个体探测到目标后,得到数值Kd并触发策略决策机制,设置该值大小等于触发策略决策机制的阈值(即病毒量阈值)大小。
2.1.2 交叉感染机制
当一些个体被感染后,个体通信半径内出现携带病毒个体时,该个体存在被交叉感染的风险。定义交叉感染概率为
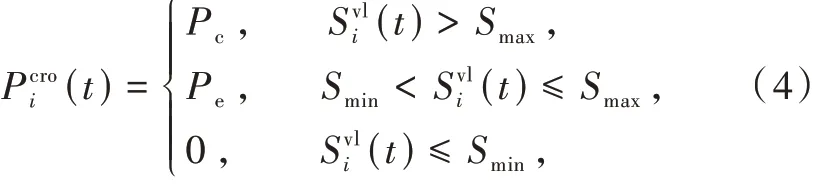
式中:Pciro(t)为个体i 在t 时刻下的交叉感染概率;Svl(t)为个体i 在t 时刻下自身含有的病毒量;S 为imax最大病毒量,即病毒量阈值;Smin为最小病毒量;当自身病毒量Svil(t)大于病毒量阈值Smax时,个体交叉感染概率为Pc;当Svil(t)处于最小病毒量Smin和最大病毒量Smax之间时,个体交叉感染概率为Pe;在此期间,个体病毒量处于积累状态;当Svil(t)小于等于最小病毒量Smin时,个体处于健康状态,感染概率为0。阈值Smax大小影响个体在接收到其他个体探测到目标的信息时,触发策略决策机制的难易程度,其值根据个体交叉感染传播病毒量确定,为避免个体频繁调用策略决策机制,设置Smax大于个体交叉感染单次最大传播病毒量。
当个体被交叉感染后,该个体会被携带病毒量的其他个体传播一定的病毒量。其中,传播病毒量大小受多个因素影响。定义交叉感染程度因子为

式中:FCIDFi(t)为个体i 在t 时刻下的交叉感染程度因子,该因子反映个体感染程度高低;Nei(t)为个体i通信半径内的感染个体集合;Dij为个体i 和个体j 之间的距离。
根据交叉感染程度因子,可定义交叉感染系数为

根据式(6),定义个体i 交叉感染传播病毒量为

式中:Vcroi(t)为个体i 在t 时刻交叉感染传播病毒量。
根据直接感染和交叉感染传播病毒量,定义总传播病毒量为

式中:Kv为病毒量衰减系数,在无人机协同探测跟踪中,该值表示上一时刻个体接收到目标信息对当前时刻个体的影响程度。
2.2 克隆选择模型构建
保护生命体不受疾病侵害的系统称为[19]免疫系统。B 淋巴细胞(也称B 细胞)是免疫系统的重要组成部分,其通过自身表面受体识别外来物质(抗原),产生识别特定抗原的抗体,来发挥免疫调节作用。当一种抗原被识别并与抗体结合时,分泌这种抗体的B 细胞受到刺激,从而快速增殖并产生大量抗体,抗体克隆的多少受亲和度高低(受体与抗原匹配度高低)影响,亲和力高的抗体将被大量克隆,以对付外来入侵者(抗原)。
基于上述理论,构建无人机集群的策略决策机制。通过计算无人机策略池各策略强度,选择合适策略作为执行策略,实现无人机集群探测跟踪。
2.2.1 策略强度描述
基于 Farmer[19-20]提出的免疫系统数学模型,本节定义描述个体策略强度表达式如式(9)所示,当个体被感染后(激活策略决策机制),个体将更新自身策略池并计算策略池各策略的策略强度,进行策略选择。

由于策略强度计算的4 部分组成均涉及到相同的变量,因此,定义函数 f (N(t),M,Rag,k,i)如下:f (N(t),M,Rag,k,i) =
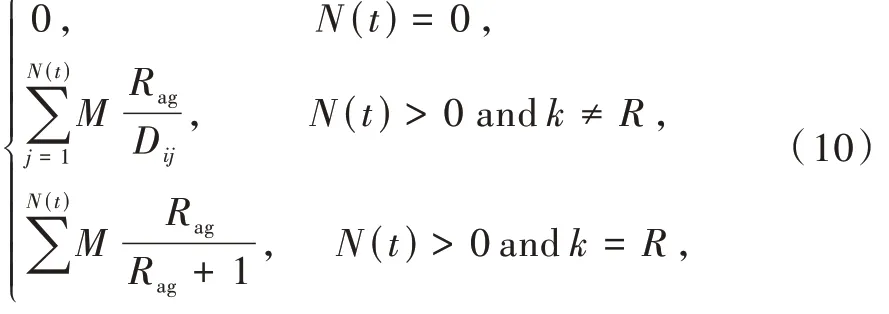
式 中 :Dij为 个 体 i 与 个 体 j 之 间 的 距 离 ;k 为 所 选 策略;R 为巡逻策略;N(t)为在 t 时刻的某一集合;M 为交互系数;Rag为某一半径。
根据式(10),可定义策略强度各部分组成如下:

式中:Npati(t)为在t 时刻个体i 通信范围内巡逻的个体集合;Msti为个体之间的相互刺激系数;Rcom表示无人机通信半径;Dij为个体i 与个体j 之间的距离。

式中:Ntrai(t)为在t时刻,个体i通信范围内跟踪目标的个体集合;Minh为个体之间的相互抑制系数。

式中:ni(t)为在t 时刻个体i 探测范围内目标的集合;Maff为个体与目标之间的相互影响系数;Rdet为无人机探测半径。
其中,在交互系数取值部分,设置目标对个体的影响程度大于个体之间的影响程度(Maff>Msti,Maff>Minh),以保证当个体探测到目标时,更趋向于选择跟踪目标策略。

式中:l 为衰减系数;Ski(t - 1)为个体 i 在 t - 1 时刻策略k 的策略强度。
通过将式(11)~(14)代入式(9)可求得个体策略池中各策略强度,以此选择合适策略执行。
2.2.2 过热策略判断机制
在每一时刻,所有个体将根据周边情况对自身策略池中策略进行策略强度计算,并选择策略强度最大的策略执行。同时,引入文献[17]提出的“批评家”思想,个体通过评估当前选择的最强策略是否“过热”(即除巡逻策略外是否有过多个体执行该策略)决定是否执行该策略,若策略“过热”,个体将选择策略池中下一个最强策略执行,避免大部分个体跟踪单个目标情况的发生。

式中:Tjnum表示个体j 周围的跟踪个体数量;NUM 为个体个数;MTp为预测目标数量;Tjoh(t)为在时刻t下跟踪目标j 策略是否“过热”,若Tjoh(t)为 1,则表示该策略“过热”。
如图2 所示,初始时刻,所有个体执行巡逻策略,当个体i 探测到目标(直接感染)或个体i 接收到其他个体发现目标的信息时,该个体存在感染风险,当个体自身所含病毒量高于病毒量阈值(即个体被感染)时,个体i 触发集群策略决策机制,若个体i 未发现目标,在特定时间间隔后,个体i 将再次判断;若个体i 触发策略决策机制,该个体将获取周围个体执行策略及自身探测范围内的目标情况,调整策略池策略并计算各策略强度,选择最强策略并评估该策略是否“过热”,若策略“过热”则选择下一个最强策略评估,若该策略未“过热”,则执行该策略,并在特定时间间隔后重复执行,直至整个系统调用终止。
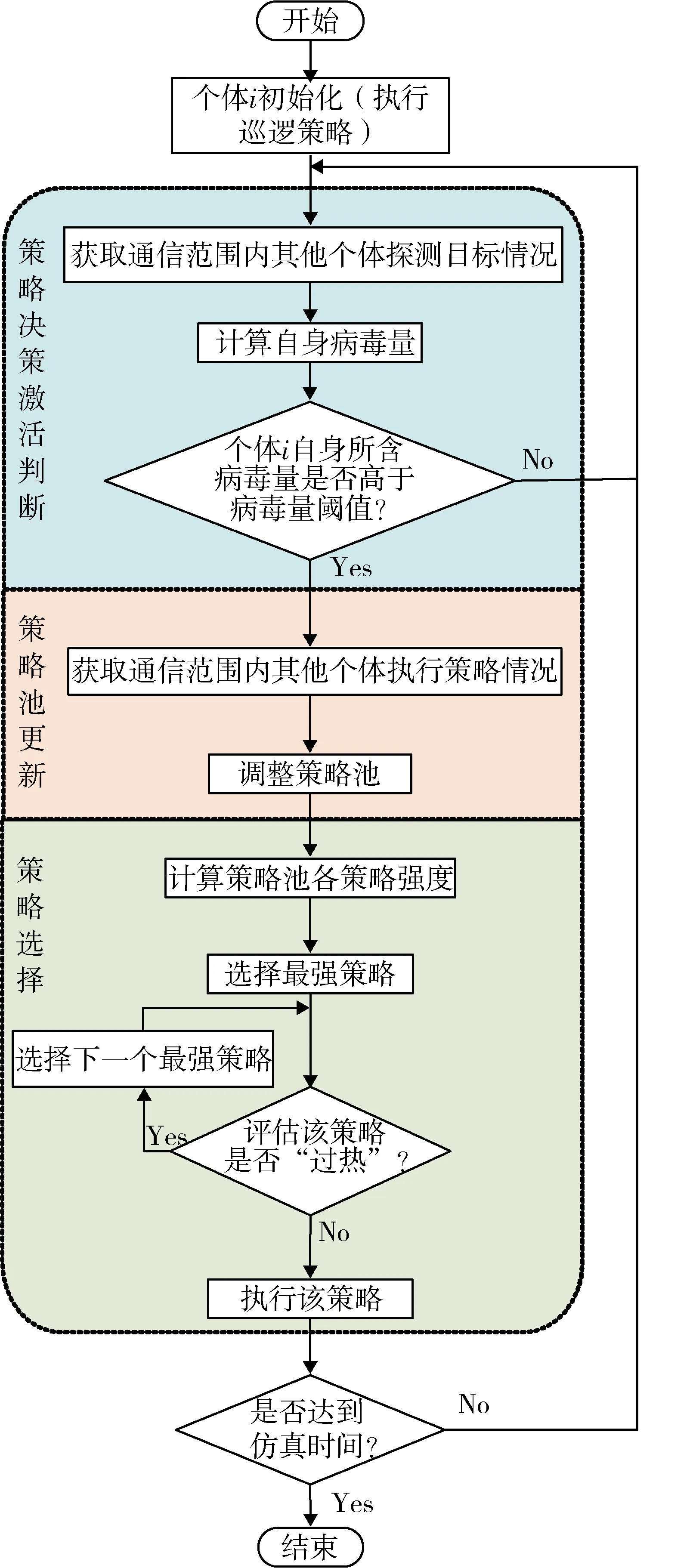
图2 算法流程图Fig.2 Algorithm flowchart
3 仿真分析
在本节中,对比了CS-II AIS 和ED-VS AIS 2 种方法,在相同参数条件下,对2 种不同方法的无人机集群跟踪目标情况进行分析。
3.1 环境及参数设置
本节设置无人机监控范围为正方形区域,为方便观察,将个体和目标均作为质点。区域大小、个体通信半径、探测半径根据下一节案例情况确定,设置我方无人机个体和目标无人机最大速度为50 km/h,转弯角度最小为20°,目标为随机运动轨迹,设置时间单位为s,一个仿真步长为1 s,CS-II AIS 方法的参数设置如表4 所示。

表4 CS-II AIS 参数设置Table 4 CS-II AIS parameter settings
3.2 仿真研究
本节将介绍应用CS-II AIS 方法的个体对目标的跟踪情况,在此基础上,设计了2 个案例对CS-II AIS 和ED-VS AIS 方法进行测试分析。
首先验证CS-II AIS 方法的有效性,假定在面积为1 000 m2的区域范围内,由10 个个体对5 个目标进行探测跟踪。其中,个体探测半径为100 m,通信半径为150 m,所有无人机速度最高不超过50 km/h。如图3 所示,黑色直线表示巡逻策略判断阈值,当策略强度分值高于该值时,执行跟踪相应目标策略,其他情况执行巡逻策略,对于个体来说,红色方块代表在该时刻,个体探测到目标时的策略强度分值,绿色菱形代表在该时刻,个体未探测到目标时的策略强度分值。

图3 10 个个体在120 s 仿真时间内的策略强度分值变化情况Fig.3 Changes in strategy strength scores of 10 individuals in 120 s simulation time
通过观察探测到目标的个体和未探测到目标的个体策略强度分值以及巡逻策略判断阈值,可以发现,在120 s 仿真时间内,大部分探测到目标的个体策略强度分值高于巡逻策略判断阈值,少部分低于策略强度分值可能受“过热”策略判断机制影响最终选择执行巡逻策略。大部分未探测到目标的个体策略强度分值则低于或等于巡逻策略判断阈值,少部分个体可能接收到其他个体传来的目标信息,选择跟踪相应目标策略,即当个体探测到目标后,大部分个体将选择跟踪策略,少部分个体将选择巡逻策略,当个体未探测到目标时,大部分个体将选择巡逻策略,少部分个体选择跟踪目标策略,符合预期设想。
3.2.1 性能评估
为评估案例研究,设置5 个性能指标。
个体探测到的目标数量:获取在单次仿真结束后由个体探测到的目标的数量,循环200 次取平均值作为个体探测到的目标数量。
个体实际跟踪到的目标数量:获取在单次仿真结束后由个体跟踪到的目标数量,循环200 次,取平均值作为个体实际跟踪到的目标数量。
巡逻个体数量:获取在200 次仿真结束后巡逻的个体总数量,取平均值作为巡逻个体数量。
算法运行时间:取整个模拟的总持续时间除以算法运行次数作为算法运行时间。
区域覆盖面积比例:个体探测范围所占区域范围的百分比。计算方法:从区域中每间隔1 m 取一个点,以1 000 m2区域面积为例,共取1 001×1 001个点,其中,相邻列和行的点可构成边长为1 m 的正方形,为方便求取区域覆盖面积,假定当正方形4 个角均在个体探测范围内,则该方块在个体探测范围内。如图4 所示,当正方形4 个角均不在个体探测范围内,则该方块不在个体探测范围内;当正方形有1 个角在个体探测范围内,则该方块的1/4 面积在个体探测范围内(图4 a));当正方形任意2 个角在个体探测范围内,则该方块的1/2 面积在个体探测范围内(图 4 b)~4 c));当正方形任意 3 个角在个体探测范围内,则该方块的3/4 面积在个体探测范围内(图 4 d)~4 f));当正方形 4 个角均在个体探测范围内,则该方块的面积在个体探测范围内(图4 g)~4 i))。以此来求取区域覆盖面积比例。

图4 区域覆盖面积计算方法示意图Fig.4 Schematic diagram of the calculation method of regional coverage area
3.2.2 案例描述与分析
针对以下案例,设置个体在未检测到目标时进行随机漫游,同时,设置个体分布位置如图5 所示,在仿真开始之前,个体将随机运动30 s,以保障在测试案例中,个体初始位置相同。

图5 个体初始位置分布Fig.5 Initial location distribution of individuals
(1)测试案例1:区域范围为1 000 m2情况下,10 个个体跟踪不同数量目标情况,其中,个体探测半径为100 m,通信半径为150 m,所有无人机速度最高不超过50 km/h。
图6 为在案例1 情况下,应用2 种方法的个体在不同数量目标情况下的区域覆盖面积比例变化,可以看到,在跟踪不同数量目标情况下,应用CS-II AIS 方法的集群区域覆盖面积比例普遍高于应用ED-VS AIS 方法的集群。

图6 应用2 类方法的无人机集群在跟踪不同数量目标情况下的区域覆盖面积情况Fig.6 Area coverage of UAV swarms using two types of methods when tracking different numbers of targets
通过图7 曲线可以看出,提出的CS-II AIS 方法能够保持和ED-VS AIS 方法基本相同的探测性能、算法运行时间的情况下,实现对更多目标跟踪,并且探测区域覆盖面积提高了13.13%。在个体未发现目标时,应用CS-II AIS 方法的个体仍能通过周围个体传染实现对目标的探测跟踪,有效地提高了集群的响应速度。因此,通过图7 c)可以看出,应用CS-II AIS 方法的无人机集群在跟踪多个目标情况下,跟踪效果要优于应用ED-VS AIS 方法的无人机集群。
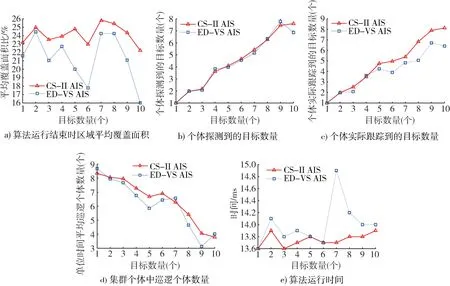
图7 应用2 类方法的无人机集群在跟踪不同数量目标时的性能比较Fig.7 Comparison of the performance of UAV swarms using two methods in tracking different numbers of targets
(2)测试案例2:为测试多个个体跟踪少量目标情况下,无人机探测跟踪情况,设置区域范围1 000 m2情况下,25 个个体跟踪不同数量目标情况,其中,个体探测半径为100 m,通信半径为150 m,所有无人机速度最高不超过50 km/h。
图8 展示了在案例2 情况下,应用2 种不同方法的集群对目标的跟踪情况。可以看出,应用ED-VS AIS 方法的集群更容易出现聚集,且出现了未探测到3 号和5 号目标的情况,应用CS-II AIS 方法的集群则有效避免了该情况。
图9 为应用2 种方法的个体在不同数量目标情况下的区域覆盖面积比例变化,在极限情况下,应用CS-II AIS 方法的集群区域覆盖面积比例高于应用ED-VS AIS 方法的集群。图10 表明,在相同大小的探测区域下,当个体远远多于目标时,2 种方法都能实现对目标的有效探测和跟踪。在同样的跟踪性能情况下,应用CS-II AIS 方法的集群能够保证更多的个体处于巡逻状态,探测区域覆盖面积比例较应用ED-VS AIS 方法的集群提升了3.717%。

图9 应用2 类方法的无人机集群在跟踪不同数量目标情况下的区域覆盖面积情况Fig.9 Area coverage of UAV swarms using two types of methods when tracking different numbers of targets
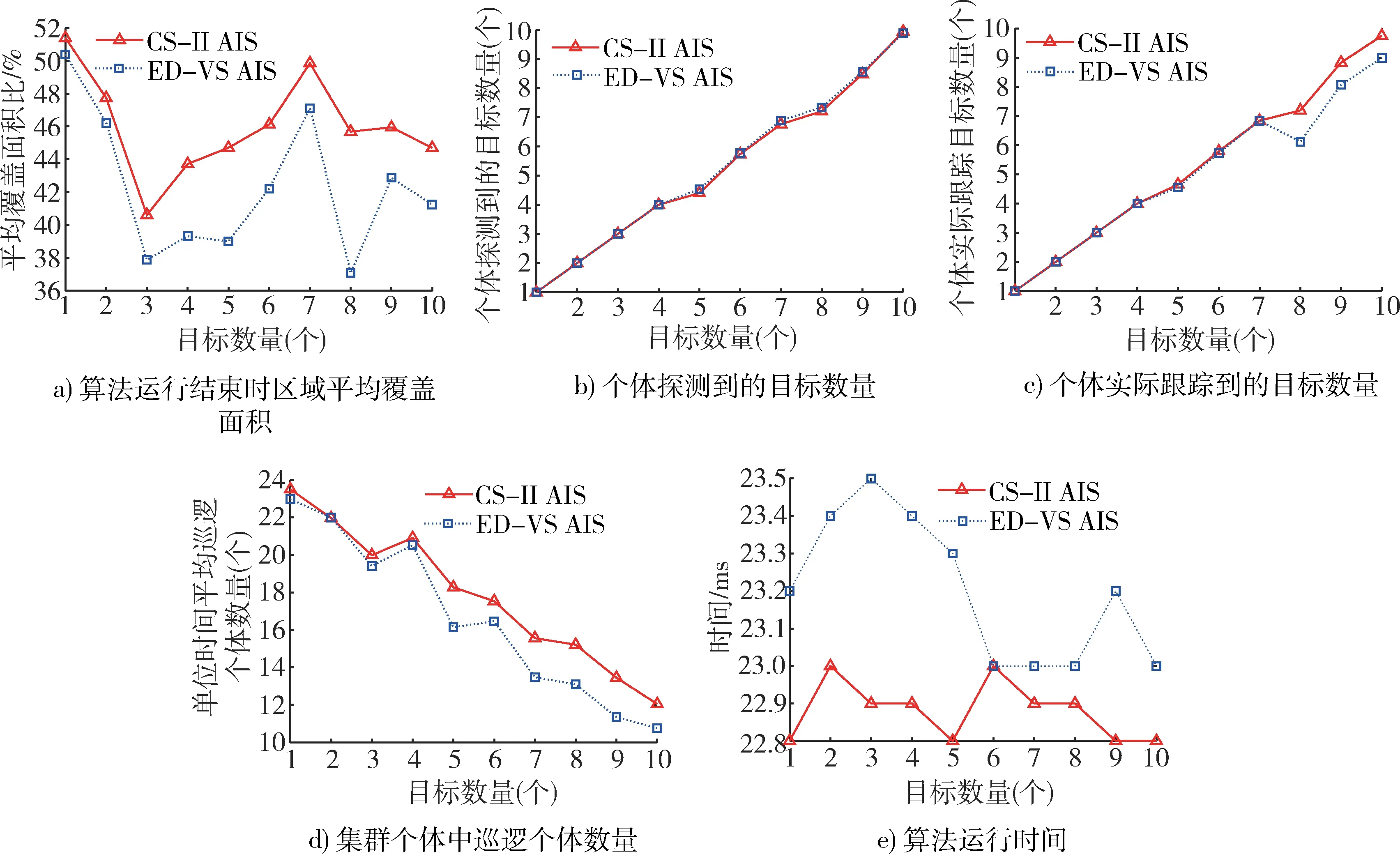
图10 应用2 类方法的无人机集群在跟踪不同数量目标时的性能比较Fig.10 Comparison of the performance of UAV swarms using two methods in tracking different numbers of targets
通过以上案例测试可以看出,相较于ED-VS AIS 方法,本文所提出的CS-II AIS 方法在不同环境中均有较好的表现。
4 结束语
针对无人机集群区域探测跟踪目标问题,本文提出了一种基于克隆选择-传染免疫模型的无人机集群系统的目标探测跟踪方法,将克隆选择过程和病毒传播过程引入到无人机集群控制当中,构建无人机决策激活机制和策略决策机制。加入实时更新的策略池机制,确保感知范围受限情况下的无人机集群进行正确的策略选择;同时,引入“过热”策略判断机制,以实现使用少量的无人机集群对多个目标实施有效跟踪,提高无人机的区域探测能力。仿真结果表明,应用CS-II AIS 方法的无人机集群能够实现区域内无人机对于目标的有效探测与跟踪。
猜你喜欢
数学杂志(2022年2期)2022-09-27
环球人物(2022年4期)2022-02-22
小资CHIC!ELEGANCE(2021年32期)2021-09-18
中国医药指南(2020年6期)2020-01-12
军事运筹与系统工程(2019年4期)2019-09-11
电子制作(2018年11期)2018-08-04
中国交通信息化(2017年3期)2017-06-08
青春(2017年5期)2017-05-22
知识就是力量(2017年2期)2017-01-21
中国卫生标准管理(2015年6期)2016-01-14
