一维综合孔径辐射计相位定标研究
2022-11-09 07:13栾英宏赵永涛孙彦龙冯剑锋姜丽菲徐红新
电子学报 2022年9期
董 健,栾英宏,赵永涛,孙彦龙,冯剑锋,姜丽菲,赵 锋,徐红新
(上海航天电子技术研究所,上海 201109)
1 引言
海面温度在全球气候变化和长期天气过程中起着重要作用,是海气界面水循环中的重要参数,对全球水循环和全球表面的能量收支平衡也具有重要作用[1].遥感获取海面温度的途径主要有红外和微波遥感,微波遥感具有全天时、全天候不间断观测的优势,是获取海面温度的重要手段[2].
目前,世界各国都在发展海面温度微波载荷,例如我国云海一号的微波辐射计[3]、日本AMSR(Advanced Microwave Scanning Radiometer)[4]、美国WindSat[5]和欧洲Microwat[6]等.上述微波载荷均采用实孔径体制,受制于天线尺寸,实孔径体制微波辐射计的空间分辨率相对较低.综合孔径微波辐射计利用小口径天线等效为大口径天线,提高了空间分辨率,是目前微波辐射计领域研究的热点[7,8].为了获得高精度、高分辨率的海面温度,上海航天电子技术研究所提出一种C波段推扫式一维综合孔径辐射计方案,通过一维综合孔径辐射计测量得到的海面亮温值,反演得出海面温度.
相位信息是一维综合孔径辐射计获得海面亮温值的关键因素,相位误差会严重影响海面亮温值的精度.国内外专家学者提出了多种定标方法,李青侠等[9]、刘浩等[10]利用外部点源和模拟外部点源测量综合孔径微波辐射计系统的响应G矩阵,通过G矩阵定标、校准系统的相位和幅度.此相位定标方法简单、高效,可精确定标系统相位.但一维综合孔径辐射计的有源器件在每次开机时相位均会发生变化,导致需频繁使用上述定标方法,耗时较多;Corbella等[11]、赵锋等[12]采用相关噪声注入法定标系统通道的同相相位误差.此相位定标方法可精确消除系统内部接收通道之间的相位误差,但缺乏对天线到前端之间路径的相位定标.
本文受文献[9~12]启发提出一种相位定标方法,此方法综合利用外部点源法和相关噪声注入法,将系统中有源器件和无源器件的相位误差分离,具有定标精度高、重复性好、节约定标时间的优点.本文首先介绍一维综合孔径微波辐射计原理以及样机的组成,接着给出相位定标方法,然后介绍定标实验,包括实验方案、实验结果、并对实验结果进行分析,最后给出结论.
2 一维综合孔径辐射计原理和样机
2.1 一维综合孔径辐射计原理
如图1所示,一维综合孔径辐射计一对基线的两组天线、接收机对目标场景的辐射亮温信号收集和放大后,经复相关运算得到可见度函数.可见度函数与目标场景的亮温之间关系如式(1)~(3)所示[13]:
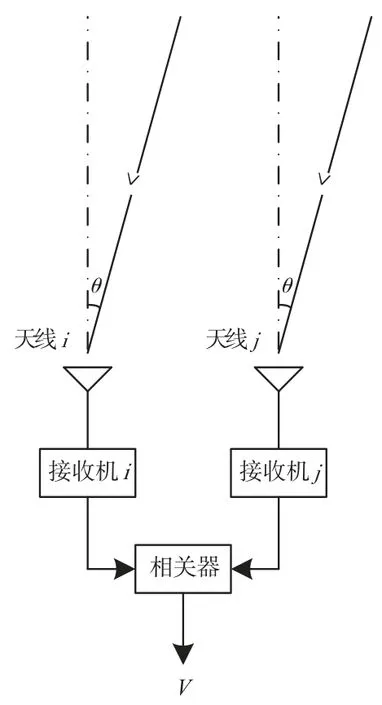
图1 一维综合孔径辐射计二接收单元示意图

其中,f0为系统中心频率、i和j为接收单元编号、μ为空间频率、ξ=sinθ为方向余旋、Vi,j(u)为可见度函数、为洗条纹函数,在基线较短时可忽略、Di和Dj为天线增益、TB(ξ)为目标场景亮温、Tr为接收机物理温度、Fni(ξ)和Fnj(ξ)为归一化天线电压方向图、Bi和Bj为接收单元带宽、Gi和Gj为接收单元增益、Hi(f)和Hj(f)为接收单元频率响应.
2.2 一维综合孔径辐射计样机
一维综合孔径微波辐射计样机如图2所示.样机采用抛物柱面反射面天线加一维稀疏排布的线性馈源阵的形式.样机包括方位俯仰驱动机构、抛物柱面反射面天线、C波段微带天线阵、接收机、高速数据采集板、数字相关器、配电单元、预处理单元、载荷计算机、定标系统、地测设备等硬件和软件.
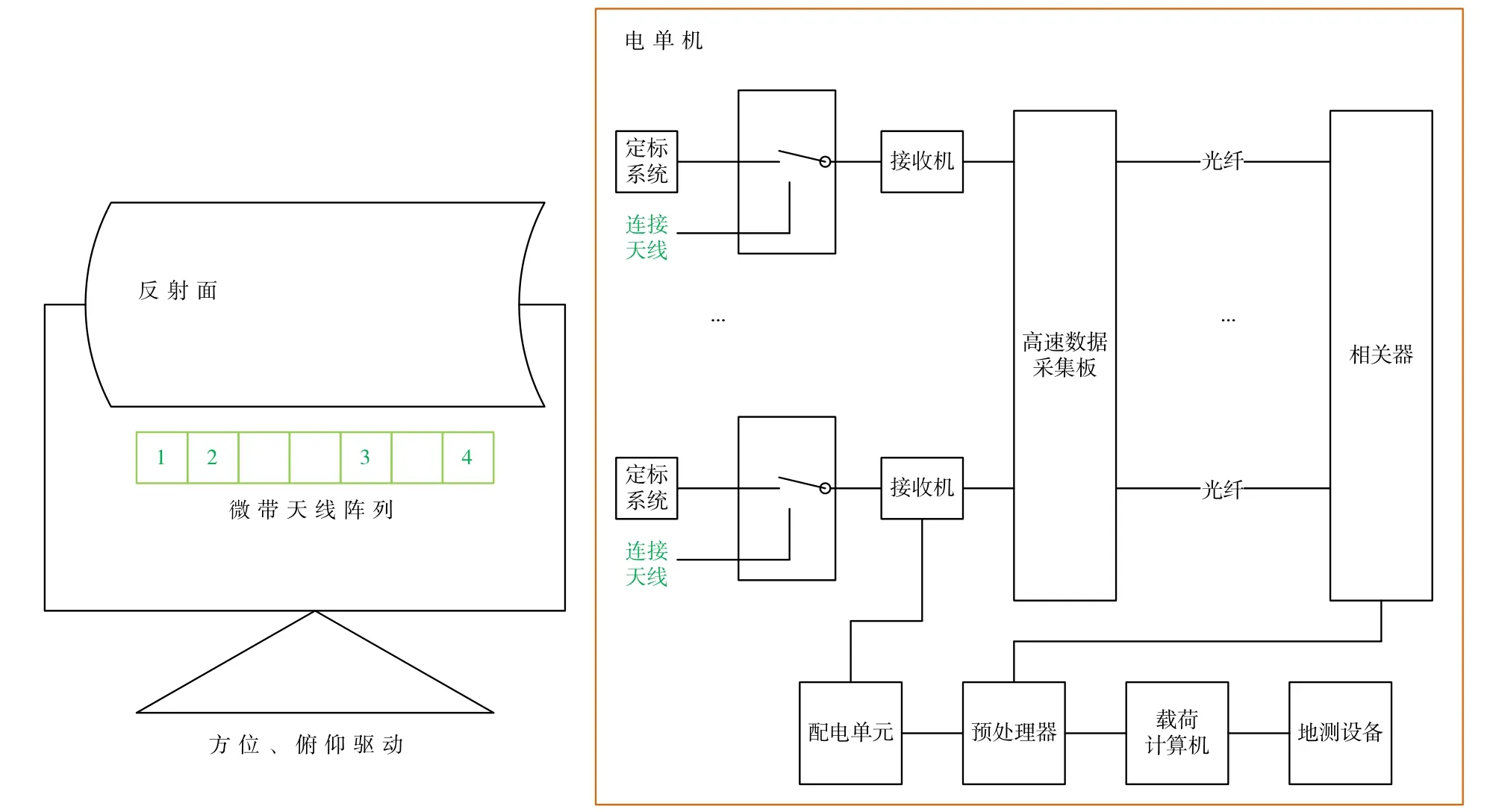
图2 一维综合孔径微波辐射计样机
地测设备控制方位俯仰驱动将综合孔径辐射计指向目标场景.目标场景的辐射信号通过抛物柱面反射面进入微带天线阵.微带天线阵包含4个微带天线,共组成6条连续基线.信号经极化分离后,到达开关.每个开关包含2路,分别接天线端口(天线态)、和定标系统(定标态).当选择开关切换到天线态和定标态时,目标场景信号、噪声信号分别进入接收机内部.信号在接收机中完成放大、下变频后变为中频信号.中频信号分为两路,一路中频信号经检波后输出至地测计算机,另一路中频信号输出至高速数据采集板.高速数据采集板对中频信号采集、IQ解调、数字下变频、滤波后变为基带信号.基带信号经过光纤传输到相关器,在相关器内两两复相关处理后,输出结果到地测计算机.
采用Camps[14]方法,根据实验样机的参数对相位误差引起的海面亮温测量误差进行仿真分析.仿真发现:海面亮温为200 K时,当相位误差为1°时,海面亮温误差约为0.4 K.相位校准前,相位误差在几十度到几百度之间,对海面亮温测量影响较大,因此减小相位误差对提高海面亮温测量精度具有重要意义,
3 相位定标方法
根据样机得到的接收链路的相位示意图如图3所示.从天线i和天线j到相关器的相位分别为Φch_ant,i和Φch_ant,j,由天线相位(Φant,i和Φant,j)、天线到接收机相位(Φa_s,i和Φa_s,j)、接收机相位(Φrcv,i和Φrcv,j)、接收机到相关器相位(Φr_c,i和Φr_c,j)组成.接收机由射频单元、中频单元、本振单元等有源器件组成.射频单元、中频单元、本振单元中含有放大器.在每次开机时,放大器增益的初相都会发生变化,导致每次开机后接收机之间的相位差会发生变化.其它器件均是无源器件,其物理相位不变.从噪声源到相关器的相位Φch_ns,i和Φch_ns,j与天线到相关器相位类似,也分为4个部分.
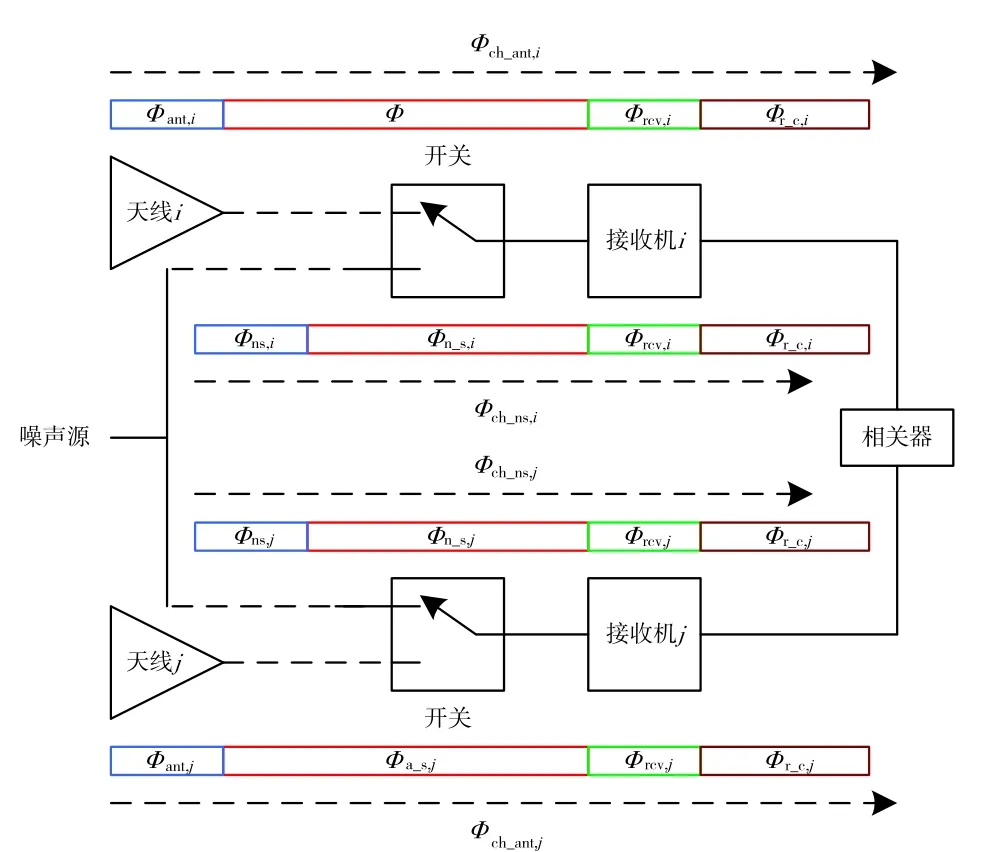
图3 综合孔径辐射计接收链路相位示意图
目标场景信号到达两个天线的相位分别为Φsence,i和Φsence,j,其理论相位差为Φsence,i-Φsence,j.而目标场景信号到达相关器的实际相位为Φsence,i+Φch_ant,i和Φsence,j+Φch_ant,j,相位定标的目的是移除Φch_ant,i与Φch_ant,j的相位差.
放置一个点源,开启点源时,一对基线在一个方向的可见度函数(u)如式(4)所示:
其中Ts为点源亮温,φ为天线到相关器的相位差,Δr为信号到达两个天线的距离差,V0为背景场可见度函数.
关闭点源时的可见度函数如式(5)所示:

点源开启和关闭的可见度函数差如式(6)所示:

可见度函数差Φv,i,j与链路相位的关系如式(7)所示:

其中,Φpsrc,i、Φpsrc,j为点源达到天线i和j的理论相位,由点源与样机的位置计算得到.
相关噪声源注入时的可见度函数Vns,i,j的相位为Φns,i,j与链路相位的关系如式(8)所示:
定义Φfix,i,j如式(10):

可见Φfix,i,j可由式(9)计算得到.Φfix,i,j消除了接收机的变化相位Φrcv,i和Φrcv,j,是一个固定值.
当观测目标场景时,此方向的理论相位差为Φsence,i,j,如式(11)所示:

实际观测相位差为,如式(12)所示:
结合式(8)、式(10)~(12)得到两者之间的关系如式(13)所示:

可见通过Φns,i,j和Φfix,i,j即可消除此方向的链路引入的相位差.其中Φns,i,j通过相干噪声注入测量得到,Φfix,i,j仅与天线方向图有关,通过测量不同方位角的点源得到.
4 相位定标试验
4.1 实验方案
进行相位定标实验.实验前,首先采用在冷热黑体法[15],将热定标源和冷定标源放置在微带天线口面,标定每路的系统增益和电压偏移量,用于幅度定标.实验时,噪声点源固定不动,方位驱动机构驱动样机以每1度方位间隔运动,测量范围从-50°到+50°.每个方位角度的测量生成三组数据,分别对应点源开启、点源关闭以及噪声源开启.测量需满足远场条件,按照式(14)计算:

其中R为远场距离、D为天线口径、λ为观测波长.
试验样机与点源的之间的距离需大于46 m,距离较远,为此在半开放暗室进行试验.如图4所示,点源放置在信标塔上,试验样机放置在半开放暗室内.点源与样机的直线距离为455 m,远大于远场条件.

图4 实验场地示意图
4.2 实验结果及分析
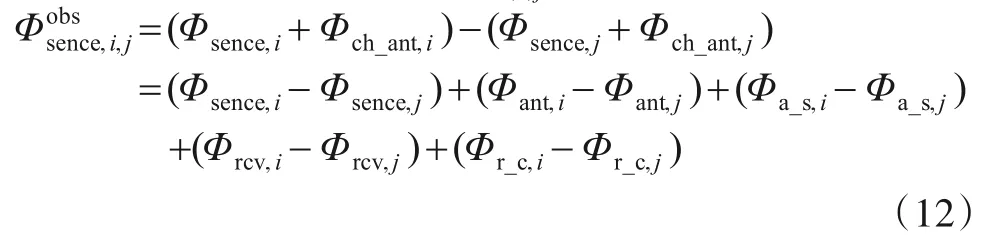
对样机的H极化和V极化均进行了相位定标实验,实验结果相似,本文仅展示H极化的测量结果.6条基线的归一化可见度函数的幅度如图5所示.按照式(6)计算得到的干涉条纹如图6所示.
图5 H极化的6条基线的归一化可见度函数幅度.绿色表示点源开启、红色表示点源关闭、蓝色表示噪声源开启

图6 H极化的6条基线的干涉条纹.红色表示干涉条纹实部、蓝色表示干涉条纹虚部,绿色表示干涉条纹幅度
受天线方向图加权影响,±40°以外区域的信号可忽略.根据式(6)和式(9)计算得到的±40°以内的Φfix,i,j如图7所示.对H极化的Φfix,i,j测量了两次,两次测量的偏差值为0.35°,重复性较高.比较两次测量的Φns,i,j,Φns,i,j有较大变化,表明接收机在每次开机时相位差确实发生变化.

图7 不同基线在不同位置的固定相位误差
为了验证测量结果的准确性,首先在暗室内测量了实验样机(仅包括反射面和微带天线)的4组天线方向图的相位,将4组天线方向图相位两两组合构成6条基线的相位,并与Φfix,i,j比较,两者的变化趋势一致,均方根误差如表1所示.由于暗室内天线方向图的相位测量精度约为2°,根据误差传递式(15)计算得到本方法的相位测量精度约为0.7°,由此引起的亮温变化约为0.28 K,满足定标要求:
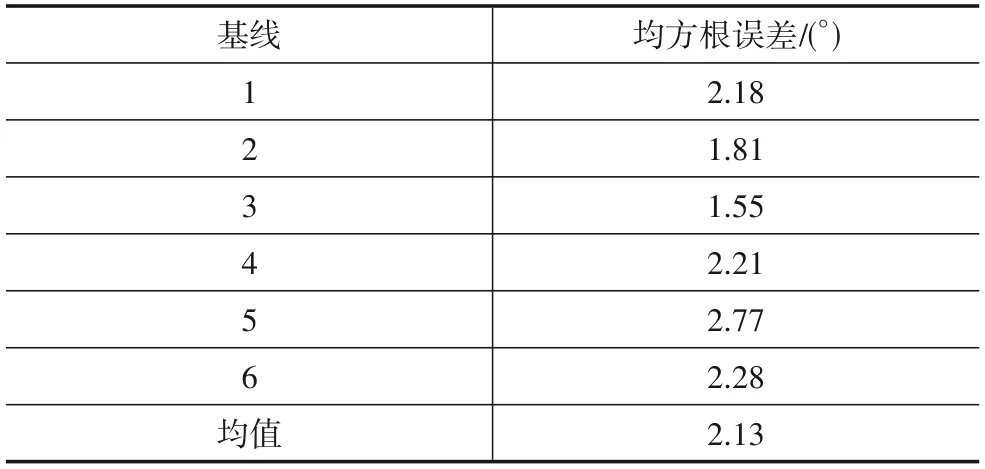
表1 暗室内测量的每条基线的相位与相位定标实验测量的相位比较

其中Φerr为两次测量的误差、Φchamber为暗室内测量误差.
接着,对位于中心位置的点源观测.观测完成后,首先对测量的可见度函数进行幅度定标,接着使用Φns,i,j进行相位修正,得到可见度值V,再通过G矩阵反演法,进行方向图和相位校准,实现点源反演[16,17],如式(16)所示:

其中G为矩阵,由定标实验测量得到的干涉条纹幅度、Φfix,i,j以及延时因子e-jkΔr组成,GT为G的转置.
重构出的点源图像,如图8所示,点源图像与理论计算的图像的偏差RMS为0.3%,满足定标要求.
社会监督指的是国家机关以外的社会组织和公民对各种法律活动的合法性进行的不具有直接法律效力的监督。社会监督的优势即体现在其较高的灵活性与广泛性,依笔者的观点,社会监督往往起着为法律监督“打头阵”的作用。另外,社会监督还能反映一个国家民主、法制发展程度。
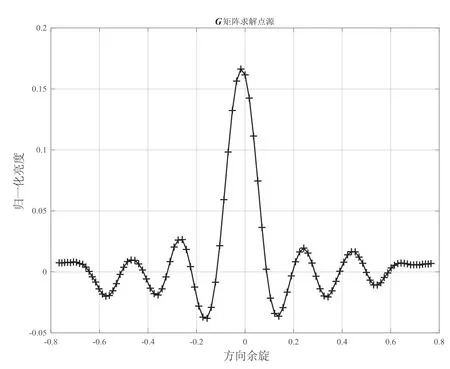
图8 重构出的点源图像
5 结论
本文提出一种一维综合孔径辐射计相位定标方法,本方法通过外部点源和内部噪声源进行联合相位定标.实验表明,本方法将固定相位误差和变化相位误差分离,定标精度约为0.7°、重复性约为0.35°.本方法具有定标精度高、重复性好、节省定标时间的优点,可广泛应用于一维综合孔径辐射计的相位定标.
猜你喜欢
雷达科学与技术(2022年5期)2022-10-26
农业工程学报(2022年10期)2022-08-22
纺织标准与质量(2022年2期)2022-07-12
航天器工程(2022年3期)2022-07-12
测绘地理信息(2022年3期)2022-06-05
电脑爱好者(2021年18期)2021-09-23
计算机与网络(2018年4期)2018-09-10
中国计算机报(2018年20期)2018-08-28
科技创新导报(2017年20期)2017-09-13
大陆桥视野·下(2016年5期)2016-07-05