
三平移并联机构拓扑设计与运动学分析
2022-11-08 02:21朱忠颀沈惠平赵一楠吴广磊
农业机械学报 2022年9期
李 菊 朱忠颀 沈惠平 赵一楠 吴广磊
(1.常州大学现代机构学研究中心, 常州 213164; 2.大连理工大学机械工程学院, 大连 116024)
0 引言
两支链少自由度三平移(3 translation, 3T)并联机构具有支链干涉少、工作空间大等特点。三平移并联机构均可基于螺旋理论[1-4]、基于位移子群[5-9]和基于方位特征集[10-11]的型综合方法设计而得。这些方法均从瞬时特征速度出发,导出非瞬时位置(过程)特征,且都以动平台方位特征(Position and orientation characteristic, POC)集和自由度(Degree of freedom, DOF)为设计目标。其中,基于方位特征集的方法具有与运动位置无关,得到的机构具有非瞬时性,且又与定坐标系无关,机构存在的几何条件具有一般性的优点。
并联机构奇异性分析的方法主要有Jacobian法、运动学法、线几何法等。文献[12-14]通过对Stewart机构的奇异轨迹分析,求解出其无奇异工作空间;文献[15-17]对无奇异工作空间进行了详细的研究;MA等[18]通过实体样机对GOSSELIN的方法进行了验证,此方法用欧拉角对姿态进行描述时较复杂,故有学者通过四元数法[19-22]对运动学进行建模,以简化奇异方程表达式,减少计算量及难度。JHA等[23]通过几何计算和数学计算软件进行奇异方程消元。
机构工作空间一般指机构动平台所能达到的运动位置的集合。求解机构工作空间的方法主要有:数值方法、几何方法、离散化方法等。对于具有符号式位置正解的并联机构,可以从正解入手进行求解,这样可以缩小搜索范围,减少计算量,且结果更为精确[24~27]。
本文将根据基于子运动链生成子工作空间和基于叠加原理的并联机构拓扑设计方法,设计一种具有符号位置正解且运动解耦的纯三平移并联机构,并对该机构进行拓扑分析;运用基于拓扑特征的机构位置分析方法求解该机构的位置正逆解;基于子运动链(Sub-kinematic chain, SKC)单元的奇异分析方法对该并联机构的奇异位形和工作空间进行分析。
1 机构设计
两支链的并联机构只有当2条支链均含有三平移的运动输出特性时,机构才具有三平移的输出运动特性。本文设计3T并联机构的2条支链如下:
第1条支链Ⅰ为能产生3T运动的2-DOF混合支链(Hybrid single open chain,HSOC),它由产生两平移(2T)元素的子平面机构并串联一个平行四边形构成。选取P11⊥R12‖R13-Pa‖P21子平面机构,且其两移动副(P11、P21)呈90°垂直布置,其中,Pa表示由4个R副组成的4R平行四边形1,如图1a所示;子平面机构输出构件的点S处与第2个4R平行四边形2的一短边固连,且平行四边形2的4个R副轴线垂直于第1个平行四边形1的转动副轴线;平行四边形2的另一短边与动平台的一端点T固结,末端点T具有产生三平移的特性,如图1b所示。
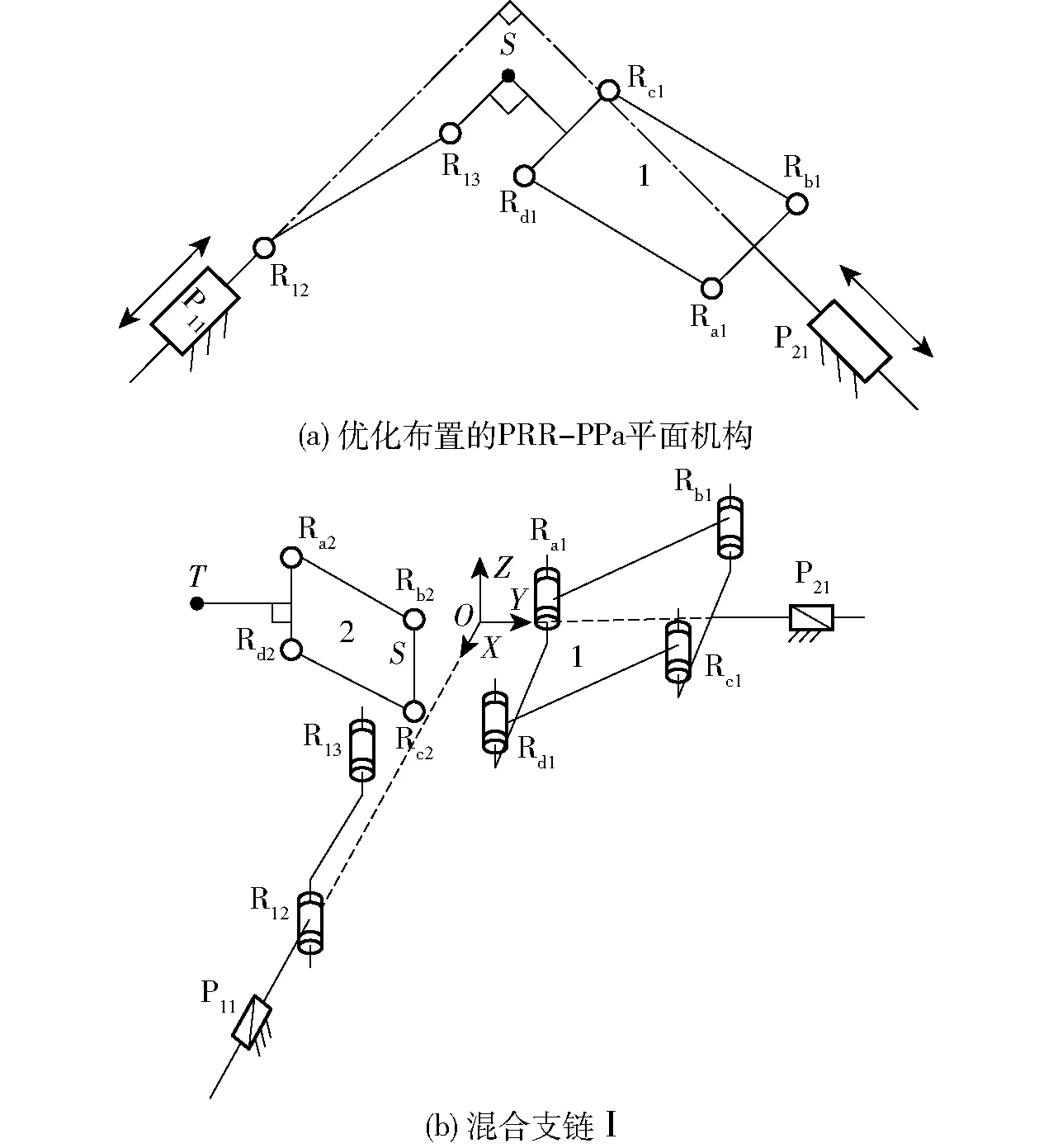
图1 具有3T输出的混合支链Ⅰ设计Fig.1 Structure designs of HSOC I with 3T output
第2条支链为一条PRUR型简单支链Ⅱ。得到的3T并联机构如图2所示。
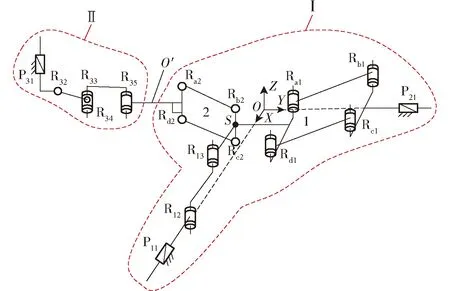
图2 3T并联机构示意图Fig.2 A novel 3T parallel mechanism
机构在静平台上的3个移动副为驱动副,其中,P11和P21在同一平面XOY内,且分别沿着X轴和Y轴轴线方向运动;P31沿着平行Z轴轴线方向运动,但位于Y轴负方向的一侧(即YOZ平面的左侧)。
此机构具有以下特点:①除3个驱动的移动副外,其余运动副均为转动副,制造方便。②具有符号式位置正解,及输入-输出运动解耦性。
2 机构拓扑
2.1 理论基础
(1)并联机构POC方程为[1]
(1)
(2)
式中MJi——第i个运动副的POC集
Mbi——第i条支链末端的POC集
MPa——机构动平台的POC集
(2)并联机构全周DOF公式为[1]
(3)

(4)
v=m-n+1
式中F——机构自由度
fi——第i个运动副的自由度
m——运动副数n——构件数
v——独立回路数
ξLj——第j个独立回路的独立位移方程数
Mb(j+1)——前j+1条支链末端构件的POC集
(3)机构耦合度[1]
由基于序单开链(Single open chain, SOC)的机构组成原理知,任一机构可分解为约束度为正、零、负的3种有序单开链,第j个SOCj的约束度定义[1]为
(5)
式中mj——第j个SOCj运动副数
Ij——第j个SOCj驱动副数
进一步,一组有序的v个SOC可划分为若干个独立子运动链SKC,而每个SKC仅含一个自由度为零的基本运动链BKC(Basic kinematics chain),对一个SKC而言,须满足
(6)
因此,SKC耦合度为
(7)
2.2 拓扑分析
2.2.1POC集
选取动平台的中点P作为机构的末端端点O′,本机构的POC集计算过程如下:
(1)HSOC末端POC集
混合支链拓扑结构可以表示为
HSOC{-(P11⊥R12‖R13-Pa①⊥P21)⊥Pa②-}
由1.1节可知,子平面机构的末端POC集为两平移,串联的平行四边形①等效于1个移动副。
因此,由式(1)可得,混合支链HSOC的末端POC集显然为3T,即
(2)PRUR支链的末端POC集
PRUR支链的拓扑结构为
SOC{-P31⊥R32‖R33⊥R34∥R35-}
由式(1)可得,支链Ⅱ末端的POC集为3T2R,即
(3)机构末端动平台POC集
由式(2)得,机构末端动平台的POC集为

2.2.2自由度
该机构可分解为2个独立回路,第1个回路为混合支链Ⅰ中的子并联机构,记为
LOOP1{-P11⊥R12‖R13-Pa①⊥P21-}
易知,其独立位移方程数为ξL1=3。
由式(3)可得,第1个回路的自由度为
因此,子并联机构的子动平台可实现两平移的输出特性。
第2个回路由第1个回路与平行四边形②及简单支链Ⅱ共同构成,简记为LOOP2。
由式(4)可得,其独立位移方程数为
由式(3)可得,整个机构自由度为
因此,该机构自由度为3,当取移动副P11、P21、P31作驱动副时,动平台可以实现三平移(3T)的运动输出。
2.2.3耦合度
由式(5)分别计算得2个回路约束度为
这样,第1、2回路可分别构成SKC1、SKC2,其耦合度由式(7)分别计算得
因此,机构耦合度为零,可求得符号式位置正解;又由于P11、P21分布于SKC1,且SKC1的位置具有自确定性,因此,机构具有输入-输出运动解耦性。
3 机构位置
3.1 坐标系建立
机构运动学建模如图3所示。子运动链SKC1在XOY平面的投影如图4a所示,子运动链SKC2在YOZ和XOZ平面的投影如图4b、4c所示,并由θ1、θ2、θ3限定点B1、B3、C3的位置。
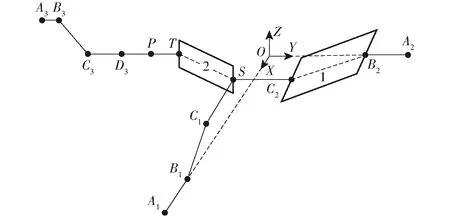
图3 3T并联机构的运动建模图Fig.3 Kinematic modeling of 3T parallel mechanism
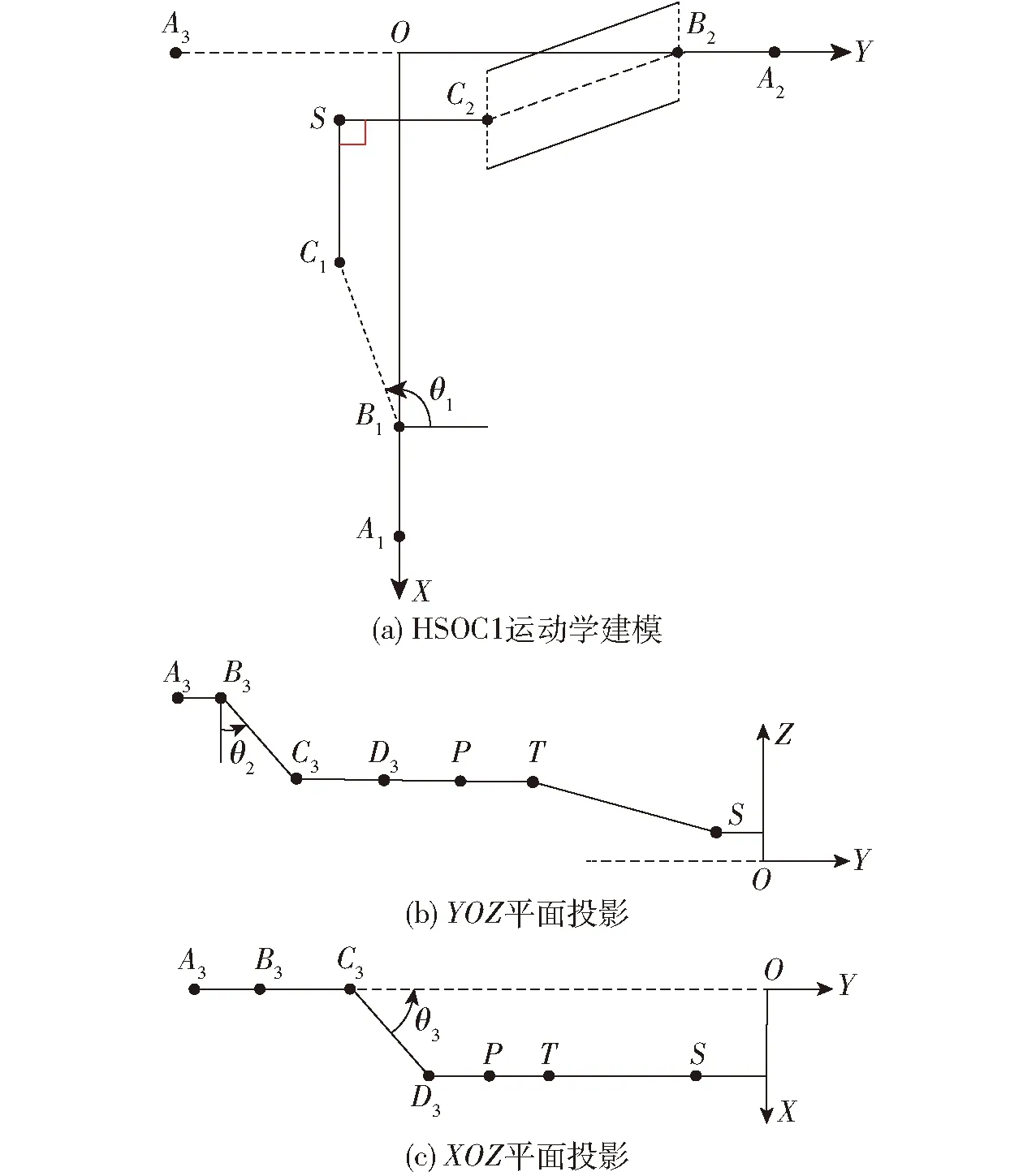
图4 子运动链SKC运动学建模Fig.4 Kinematic modeling of sub-kinematics chains
点A1、A2和A3分别代表3个移动副P11、P21、P31的位置;点B1、C1、B3、D3为相应转动副R12、R13、R32、R35的位置;点C3为虎克铰R33、R34两个转动副轴线的交点;点C2、B2和T、S为两个平行四边形短边的固接点,且点S为子动平台末端点;机构动平台的两个端点为点D3、T,而点P为其中心点。
设构件尺寸参数为:lA1B1=l1;lA2B2=l5;lA3B3=l9;lB1C1=l2;lC1S=l3;lC2S=l4;lB3C3=l8;lC3D3=l7;lB2C2=q1;lST=q2;lTD3=2l6。点A3在静坐标系下,只在Z轴方向上移动,故其X、Y轴坐标为固定值,即XA3=0,YA3=-l10。
3.2 位置正解求解
已知静平台3个驱动副的输入分别为ρ1、ρ2、ρ3,求动平台的3个输出,即P=(PX,PY,PZ)。易知A1=(ρ1,0,0),A2=(0,ρ2,0),A3=(0,-l10,ρ3),B1=(ρ1-l1,0,0),B2=(0,ρ2-l5,0),B3=(0,-l10+l9,ρ3)。
由Ai、Bi(i=1,2,3)的坐标,可直接求得SKC1、SKC2的运动位置。
(1)在SKC1(A1-B1-C1-S-C2-B2-A2)中有
C1=(ρ1-l1-l2sinθ1,l2cosθ1,0)
S=(ρ1-l1-l2sinθ1-l3,l2cosθ1,0)
C2=(ρ1-l1-l2sinθ1-l3,l2cosθ1+l4,0)
由几何约束lB2C2=q1列出位置方程,并求得
G1sinθ1+G2cosθ1+G3=0
(8)

(2)在SKC2(A3-B3-C3-D3-P-T-S)中有
由几何约束lTD3=2l6,列出位置方程,并求得
(9)
进一步,由几何约束lST=q2列出位置方程,并求得

(10)

由式(8)~(10)可得点T、D3的坐标,由此可得其中心点P的位置为
(11)
显然,因式(8)中有m=±1,式(10)中有n=±1,动平台的点P共有4组解。
3.3 位置逆解求解
已知动平台上P=(Px,Py,Pz),求输入ρ=(ρ1,ρ2,ρ3)。
(1)由点P坐标,求得点T、D3坐标为
D3=(PX,PY-l6,PZ)
T=(PX,PY+l6,PZ)
记S=(SX,SY,0),且SX=PX,由几何约束lST=q2,得
(12)
同时,求得
C1=(PX+l3,SY,0)C2=(PX,SY+l4,0)
(2)由几何约束lB1C1=l2和lB2C2=q1,可得
(13)
(14)
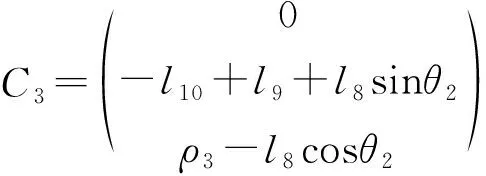
设定杆B3C3与Z轴负方向的夹角为θ2,则可求得点C3的坐标为
C3=(0,-l10+l9+l8sinθ2,PZ)
由几何约束lC3D3=l7列出位置方程,求得
(15)
于是,由式(13)~(15)可得位置逆解为
(16)
其中,u=±1、v=±1、w=±1。
由式(11)、(16)可知,理论上该机构存在16组逆解。
3.4 位置正逆解数值验证
设机构各杆件参数为:l1=100 mm,l2=180 mm,l3=80 mm,l4=60 mm,l5=100 mm,l6=50 mm,l7=l8=180 mm,l9=60 mm,l10=560 mm,q1=q2=180 mm。
在SolidWorks中的机构三维图上,取两组输入参数如下:①ρ1=355.95 mm,ρ2=344.09 mm,ρ3=285.80 mm。②ρ1=353.17 mm,ρ2=268.28 mm,ρ3=333.98 mm。
由式(8)~(11),用Matlab求得理论位置正解,如表1所示。

表1 位置正解计算值Tab.1 Calculated value of positive position solution mm
再将表1中的数值代入式(12)~(16),可得逆解数值如表2所示。

表2 位置逆解计算值Tab.2 Calculated value of inverse position solution mm
误差在1%之内,故验证了正逆解公式推导的正确性。
4 机构奇异性分析
4.1 奇异位形分析
4.1.1在SKC1中
为求解SKC1中的雅可比矩阵,需在SKC1中建立位置约束方程。此时,设SKC1子动平台末端的输出点S=(xS,yS,0),则
(17)
由杆长lB1C1=l2和lB2C2=q1得2个约束方程为
(18)

(19)
其中
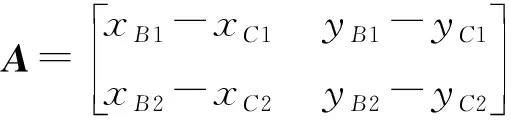
根据矩阵A、B是否奇异,将机构奇异位形分为两类。
(1)逆向运动学奇异
当机构发生逆向运动学奇异时,即det(B)=0,矩阵B可视为两个行向量,此时,矩阵B内至少有一个向量为零向量,即
g11=-(xB1-xC1)=0
即点B1、C1的x坐标值相等,此时,从动杆B1C1与沿着X轴的导轨垂直,如图5所示。
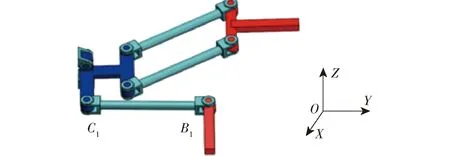
图5 SKC1逆向运动学奇异位形Fig.5 Inverse kinematic singular configuration of SKC1
点B2、C2的y坐标值相等时有
g22=-(yB2-yC2)=0
此时,从动杆B2C2与沿着Y轴的导轨垂直,即平行四边形两长边重合。
上述两种奇异发生时,驱动端有速度,但是末端速度为零,机构容易出现卡死。当B2C2与导轨垂直时,平行四边形副两长杆重合,杆件发生干涉,该种情况显然不存在;同样,由于驱动副运动范围限制,从动杆B1C1同样无法运动到与驱动轴线垂直的情况,故这种奇异不需要过多考虑。
(2)正向运动学奇异

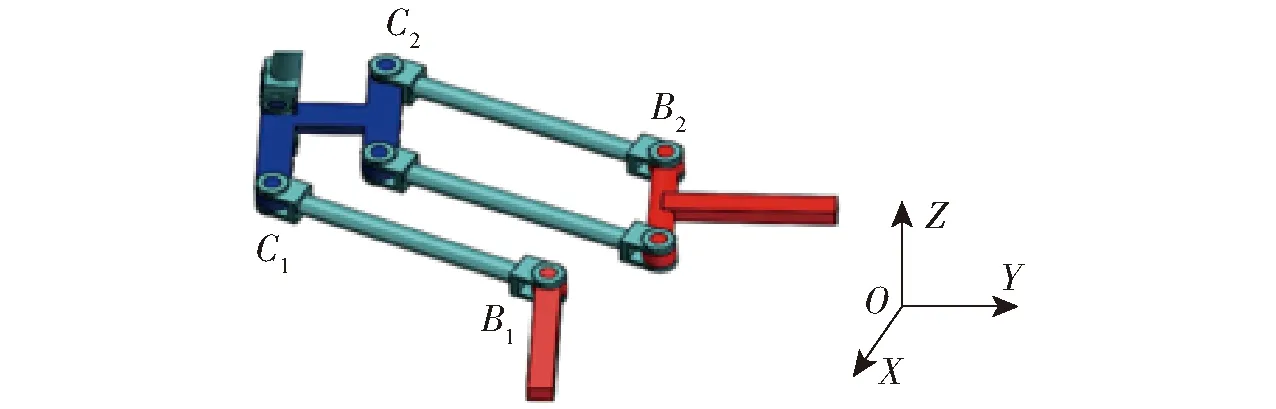
图6 SKC1正向运动学奇异位形Fig.6 Forward kinematic singular configuration of SKC1
4.1.2在SKC2中
为求解SKC2中的雅可比矩阵,将SKC2视为一个独立的机构,并将SKC1中点S的输出作为SKC2中的XOY平面内二维平动输入,而另一个输入由沿着Z轴移动的移动副A3产生。
由两个几何条件lB3C3=l8、lST=q2和一个位置关系xT=xS,得位置约束方程为
(20)

(21)
其中
根据矩阵C、D是否奇异,将机构的奇异位形分为两类。
(1)逆向运动学奇异
将矩阵D视为3个行向量,机构发生逆向运动学奇异时,det(D)=0,显然,矩阵无法线性相关,故矩阵D内至少有一个零向量,即
zB3-zC3=0
即点B3和C3的Z轴坐标值相等,此时从动杆B3C3与Z轴呈90°,杆A3B3、杆B3C3两杆共线,如图7所示。

图7 SKC2逆向运动学奇异位形Fig.7 Inverse kinematic singular configuration of SKC2
点S和点T的Y轴坐标值相等时有
yS-yT=0
此时,杆ST与Z轴平行,即平行四边形机构2的两长杆重合。此类情况由于机构杆件的干涉或重合以及驱动副运动范围的限制,在实际运动中不可能到达,故不作过多考虑。
(2)正向运动学奇异

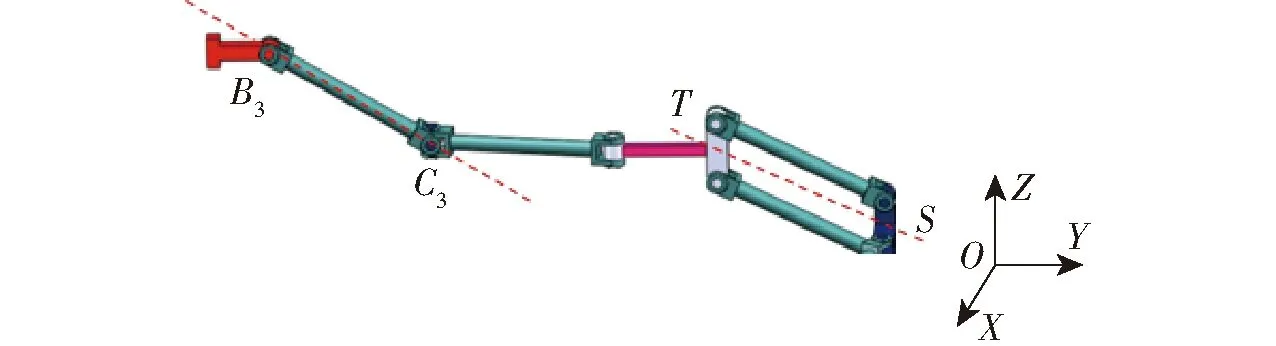
图8 SKC2正向运动学奇异位形Fig.8 Forward kinematic singular configuration of SKC2
对于只含有一个SKC的机构,机构奇异性分析只能在单个SKC内求解整体机构的输入输出速度雅可比矩阵,并据此来分析机构的奇异情况。此时,其奇异既可存在于某个支链上,也可存在于支链之间。
4.2 机构奇异曲线/曲面绘制
采用Maple软件和SIROPA[28]工具包对该并联机构进行代数方程建模,并基于SKC单元分析其奇异曲线/曲面。
4.2.1SKC1奇异曲线
(1)逆向运动学奇异(串联奇异)
运用SIROPA中的SerialSingularities函数,得到一组满足串联奇异的多项式s1
(22)
运用Projection函数对式(22)进行消元,求得一个仅包含2个输出变量的约束方程s1_cart
(23)
利用Plot2D函数表达出s1_cart方程,即为机构SKC1的串联奇异曲线,如图9所示。图中坐标x1和y1分别代表s1_cart方程中的输出变量x1和y1,单位为分米(dm)。
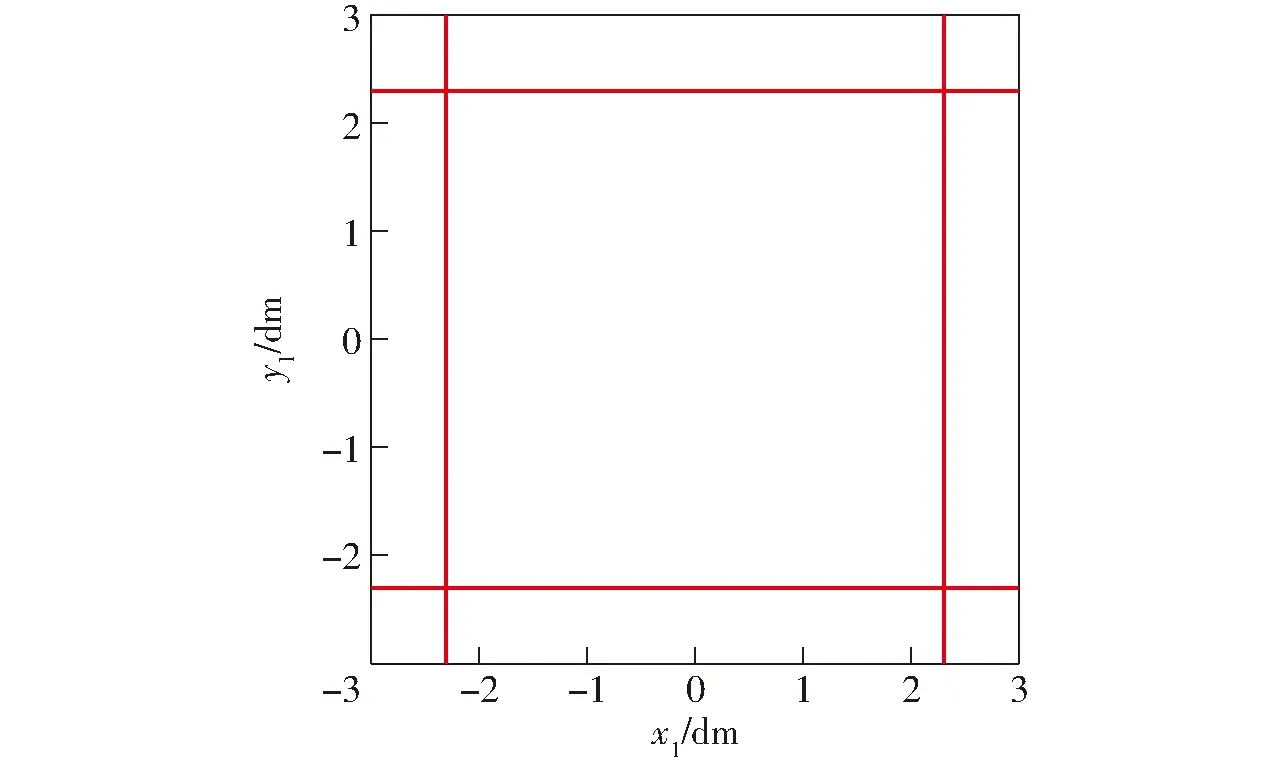
图9 SKC1的串联奇异曲线Fig.9 Serial singular curves of SKC1
(2)正向运动学奇异(并联奇异)
运用SerialSingularities函数得到一组满足并联奇异的多项式s2
(24)
运用Projection函数对式(24)进行消元投影,得到一个仅包含输出变量x1、y1的二次约束方程s1_cart
(25)
利用Plot2D函数表示出s2_cart,即为机构SKC1的并联奇异曲线,如图10所示。图中坐标x1和y1分别代表s2_cart方程中的输出变量x1和y1。
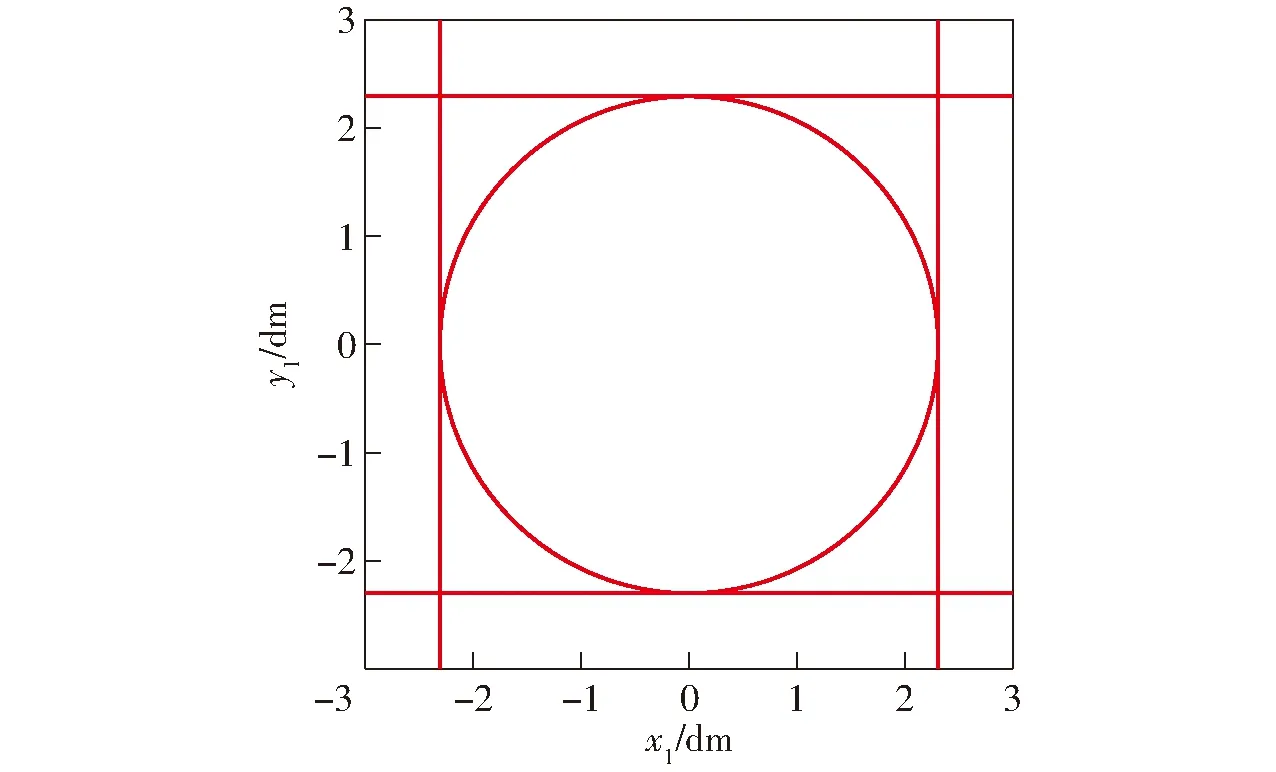
图10 SKC1的并联奇异曲线Fig.10 Parallel singular curves of SKC1
4.2.2SKC2奇异曲面
利用SIROPA中的CreateManipulator函数对SKC2进行建模。此时,以SKC1的末端输出作为SKC2的输入,SKC2的输出即为机构动平台的输出。
给定3个输入x1=0,y1=-150 mm,ρ3=240 mm后,即可通过SIROPA程序包进行奇异性分析。
(1)逆向运动学奇异(串联奇异)
运用SerialSingularities函数,求得一组满足串联奇异的多项式s12
(26)
其次,运用Projection函数,对式(26)进行Grobner基消元,求得只含3个输入变量(x1,y1,ρ3)的约束方程s12_art

(27)
故使用Plot函数列里的Plot3D函数表达3个变量的s12_art隐式约束方程的曲面,即为SKC2的串联奇异曲面,如图11所示。图中坐标x1、y1和ρ3分别代表s12_art方程中的变量x1、y1和ρ3。
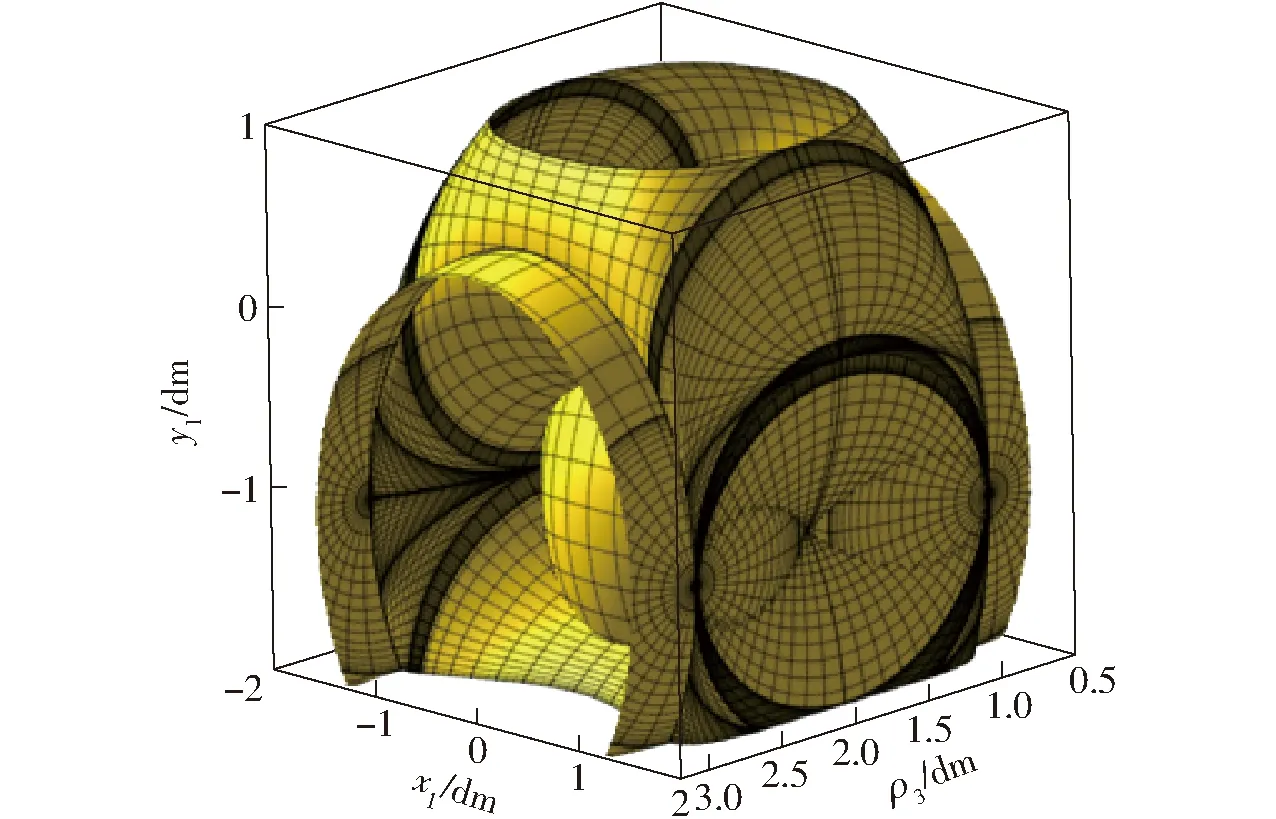
图11 SKC2的串联奇异曲面Fig.11 Serial singular surfaces of SKC2
(2)正向运动学奇异(并联奇异)
通过Analysing函数列里的函数ParallelSingularities,得到一组满足并联奇异的多项式s22
(28)
通过Projection函数对式(28)进行Grobner基消元,得到只含有3个输出变量x2、y2、z2的约束方程s22_cart
(29)
运用Plot3D函数表达出s22_cart隐式约束方程的曲面,即为SKC2的并联奇异曲面,如图12所示。图中坐标x2、y2和z2分别代表s22_cart方程中的变量x2、y2和z2。
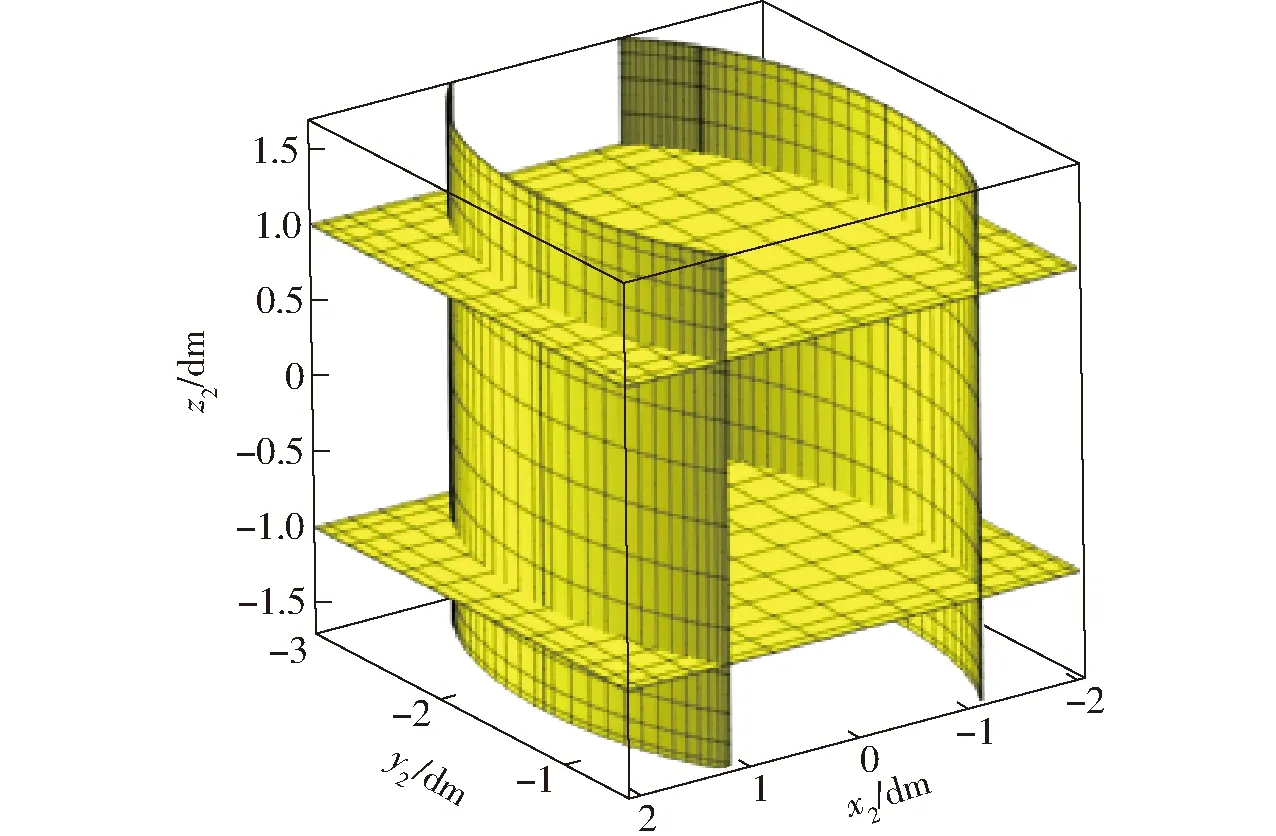
图12 SKC2的并联奇异曲面Fig.12 Parallel singular surfaces of SKC2
5 机构工作空间求解
5.1 SKC1
根据3.1节中给定的机构杆长参数,利用离散元方法及位置正解式(8)~(11)对机构进行坐标值搜索,可求得机构中SKC1的工作空间。然后,避开奇异位置,在SKC1的工作空间内截取一个规则的正方形,边长为300 mm,作为其任务工作空间;又可看成SKC2中点S的输入范围,如图13所示。
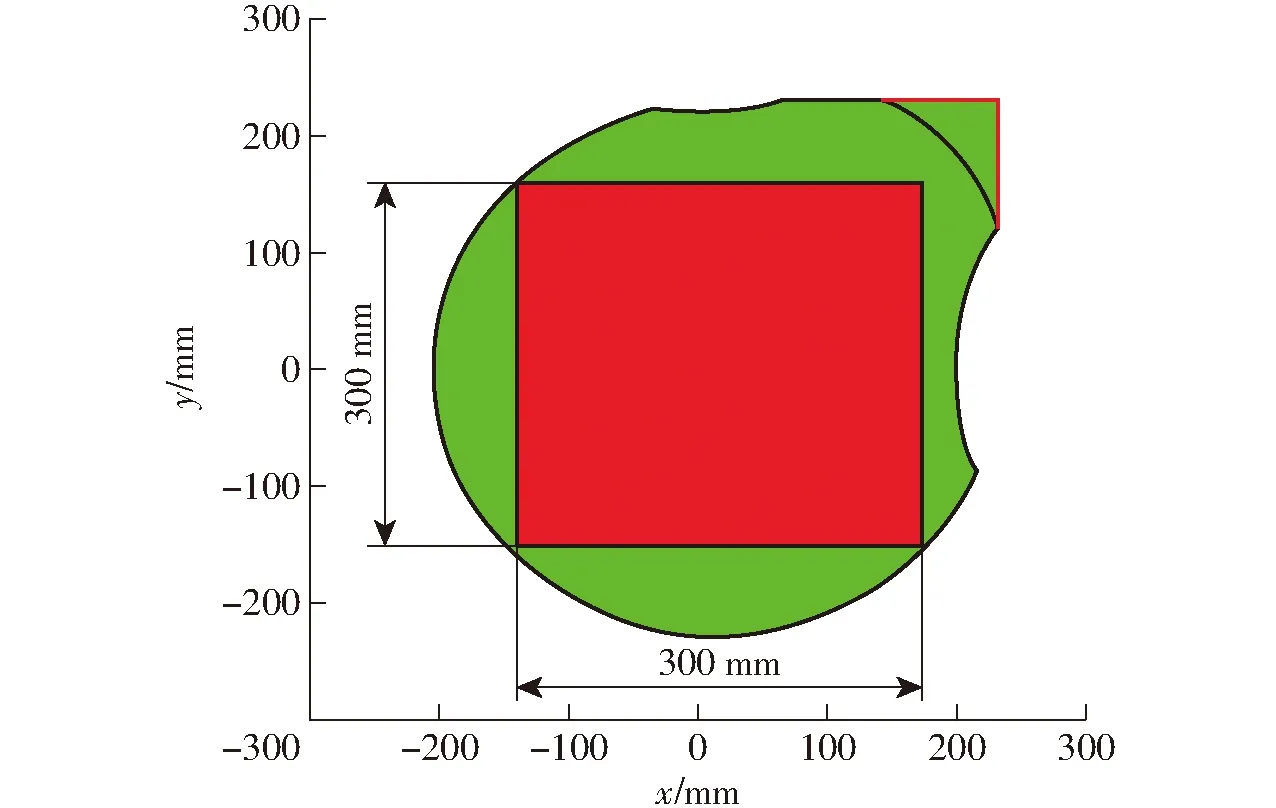
图13 SKC1的任务工作空间Fig.13 Task workspace of SKC1
5.2 SKC2
因SKC1可达工作空间为SKC2的部分输入的范围,机构动平台的工作空间为SKC2在SKC1的末端运动(X-Y)范围下的输出工作空间。故SKC1的工作空间决定了机构整体在XOY平面上的运动范围,而简单支链Ⅱ决定了机构整体在Z方向的运动空间,从而可基于子工作空间叠加原理求解出SKC2的工作空间。然后,在此工作空间内截取出一最大规则无奇异任务工作空间:300 mm×150 mm×120 mm,如图14所示。
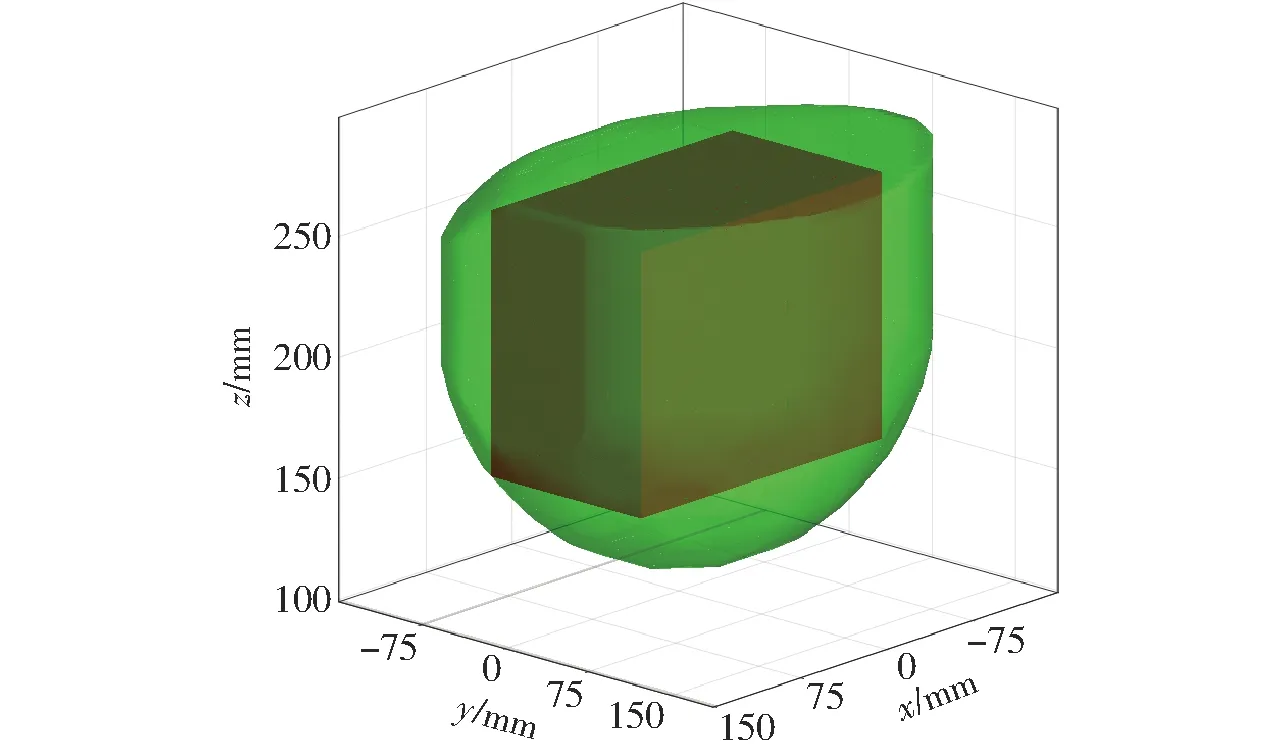
图14 SKC2的任务工作空间Fig.14 Task workspace of SKC2
因此,三平移并联机构整体任务工作空间是以SKC1的平面工作空间为基准,由SKC2沿Z轴生成的工作空间为约束,最终得到一个300 mm×150 mm×120 mm的规则无奇异立体工作空间。
6 结论
(1)设计了一种三平移(3T)并联机构,该机构耦合度为零,由两个SKC组成,具有符号式位置正解且部分运动解耦特性。
(2)采用基于SKC单元的奇异分析方法对该并联机构的奇异位形进行了分析,该法可找出SKC内部的所有奇异位形,并利于求解机构无奇异的规则工作空间。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
内燃机与配件(2022年2期)2022-01-17
数学大王·低年级(2019年10期)2019-11-25
电机与控制学报(2018年9期)2018-05-14
中学生数理化·八年级数学人教版(2017年4期)2017-07-08
新高考·高一物理(2016年11期)2017-07-07
小学生导刊(低年级)(2016年12期)2016-12-07
中学生数理化·八年级数学人教版(2016年2期)2016-04-13
新高考·高一物理(2016年1期)2016-03-05
