
基于加权算法的空-天遥感升尺度土壤含盐量监测模型
2022-11-08 02:20张智韬陈钦达黄小鱼宋志双张珺锐
农业机械学报 2022年9期
张智韬 陈钦达 黄小鱼 宋志双 张珺锐 台 翔
(1.西北农林科技大学旱区农业水土工程教育部重点实验室, 陕西杨凌 712100; 2.西北农林科技大学水利与建筑工程学院, 陕西杨凌 712100; 3.西北农林科技大学信息工程学院, 陕西杨凌 712100)
0 引言
土壤盐渍化是一个全球化的生态环境问题,不仅是引起土地退化的一个重要因素[1-2],而且在很大程度上影响干旱半干旱地区灌溉农业的可持续发展。因此,利用遥感手段及时、准确地监测解析盐渍化的空间分布特征[3],能为灌区盐渍化防治与农业生产提供实践指导。
传统土壤盐渍化监测手段多为野外实地采样,虽然监测精度较高,但采样耗时费力且只能针对单个点进行观测[4]。卫星遥感具有监测范围大和获取方便快捷等特点,在土壤大范围动态监测中发挥着不可替代的作用,目前已得到广泛应用[5-6]。然而,利用卫星遥感数据探究土壤盐渍化问题,在其特定尺度下获取的地表参数信息有限,这是因为土壤盐渍化具有极强的时空变异性,受各种环境因素协同作用影响[7]。并且,不同时空分辨率的遥感数据还存在如传感器差异、大气状态等诸多不确定因素。要想透彻了解土壤盐渍化现象的发生发展始终离不开对尺度问题的讨论[8],因而,探究尺度转换方法来获取多时空分辨率遥感影像具有重要意义[9-12]。上述研究大多基于卫星到卫星的空间尺度转换,关于无人机到卫星尺度转换方面的相关研究较少。无人机具备高时效性和高精度等优势,可在一定范围内对土壤盐渍化进行监测,若能将无人机的高精度和卫星的大范围监测相结合[13],便能在大范围区域开展遥感监测的基础上提高其监测精度。
鉴于此,本文以内蒙古自治区河套灌区沙壕渠灌域为研究区,选取研究区内4块地为试验区,以4月裸土期表层土壤含盐量为研究对象,采用主导变异权重法、局部平均法和最邻近法分别将试验区无人机四波段影像(0.1 m)升尺度至与GF-1卫星(16 m)同一尺度,经由统计评价指标分析空间变异权重算法和传统尺度转换方法对试验区各波段影像的转换效果,引入不同变量组合并结合多元线性回归方法和BP神经网络构建不同数据源关于土壤含盐量的定量监测模型,以期得到最优的无人机升尺度模型,再依据无人机与卫星影像之间关系进行模型修正,初步探索将无人机高精度优势和卫星大范围监测联系起来的结合方式,为实现无人机、卫星多光谱遥感一体化监测裸土期农田土壤含盐量和河套灌区农业可持续发展提供科学参考和数据支持。
1 监测模型建立
1.1 研究区概况
位于内蒙古自治区巴彦淖尔市西部的河套灌区是中国灌溉面积最大的灌区,它由一干灌域、解放闸灌域、永济灌域、义长灌域、乌拉特灌域和乌梁素海灌域组成。本文研究区沙壕渠位于解放闸灌域内部(40°52′~41°00′N,107°05′~107°10′E),如图1所示,形状类似一个狭长的倒置三角形。该区域位于西北黄土高原地带,平均海拔在1 000 m以上,其土壤质地以粉壤土、砂壤土和壤土为主,气候属于典型的干旱半干旱大陆性气候,年降水量和蒸发量分别约为158 mm和2 000 mm,降水少蒸发大[14],导致区域内土壤水盐运移速率加快,使得深层土壤盐分易随潜水蒸发而逐渐向地表积聚,再加上土质因素及不合理的农业灌溉方式,多重因素综合作用下加重了该区域土壤盐渍化程度,严重制约了当地农业长期可持续发展。
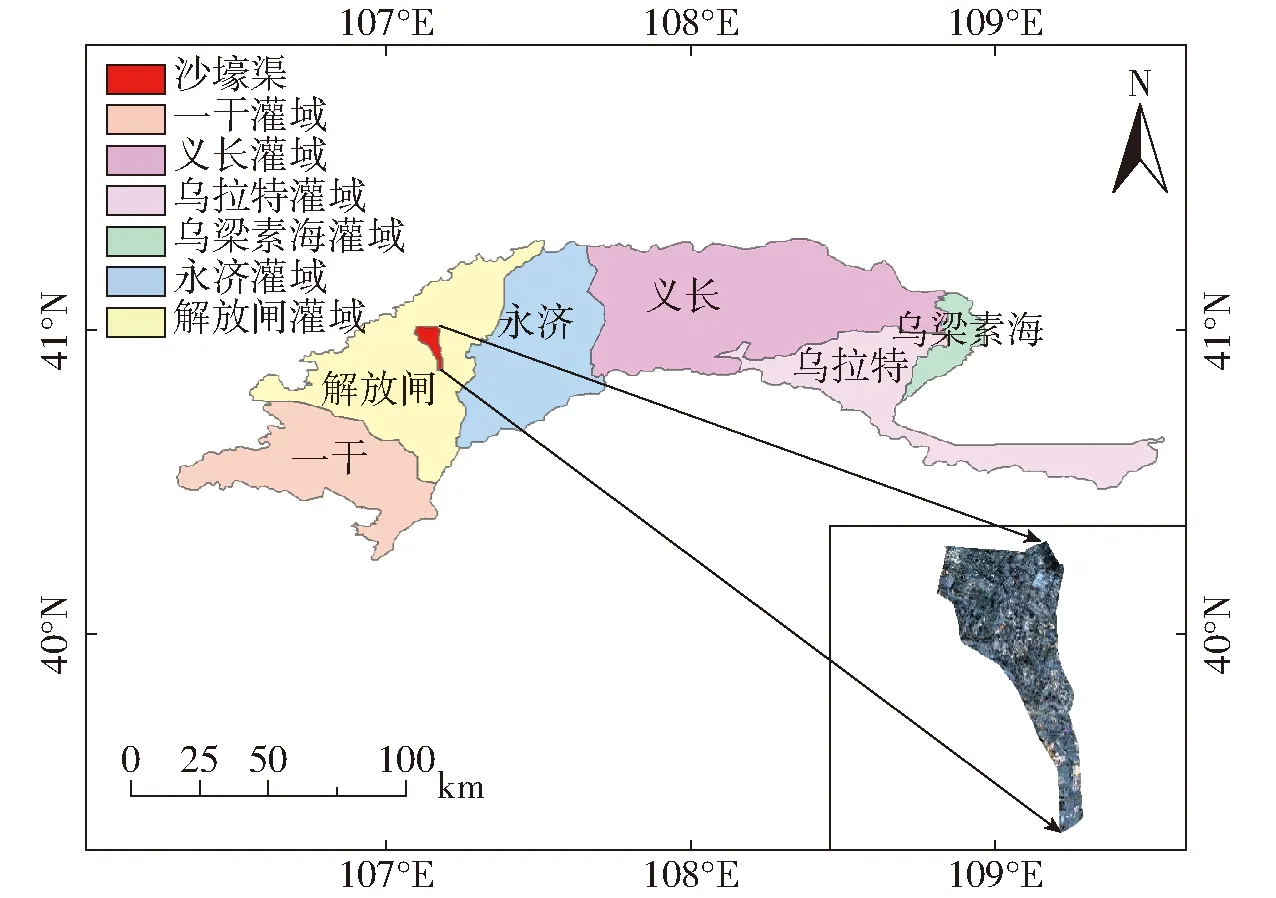
图1 研究区位置示意图Fig.1 Sketch of study area
1.2 采样点设置和盐分数据采集
于2019年4月12—21日对沙壕渠灌域进行实地调研和采样,根据土壤盐渍化程度确定了4块试验区并对其进行编号,同时在每块试验区均匀布设了30个采样点,采样点大多为无植被覆盖的表层土壤,深度为0~10 cm,如图2所示。为使采样时间和无人机影像获取时间保持一致,选取晴朗天气进行无人机影像收集和实地采样,利用手持式GPS定位仪记录每个采样点的地理位置,采用五点法获取表层土壤样本,并将所获土样放入标记好的铝盒内,在实验室对土样进行干燥研磨处理后,以土水质量比1∶5配置土壤溶液,经过搅拌、静置、沉淀、过滤后,使用电导率仪(DDS-307型,上海佑科仪器公司)测定土壤溶液电导率,对每个采样点的5个土样电导率取平均值作为该样点处的电导率EC1∶5,依据经验公式CSSC=(0.288 2EC1∶5+0.018 3)×100%计算土壤含盐量(SSC)。整理120个样本数据,剔除其中3个异常值,剩余117个研究样本按照盐分含量由大到小排序,根据2∶1的比例划分建模集和验证集并进行等间隔采样。同时将117个土壤样本盐分划分为4个等级[15]:非盐土(含盐量0~0.2%)、轻度盐渍化土(含盐量0.2%~0.5%)、重度盐渍化土(含盐量0.5%~1.0%)和盐土(含盐量大于1.0%),对土壤样本的描述性分析结果如表1所示。其中非盐土、轻度盐渍化土、重度盐渍化土和盐土占比分别为63.2%、27.4%、4.3%和5.1%,变异系数为1.11。建模集和验证集变异系数分别为1.13和1.08,相差不大,且从表1可以看出,建模集和验证集的数据范围分别为0.06%~1.49%和0.06%~1.30%,两者范围几乎一致且分布均匀,提升了建模可靠性。
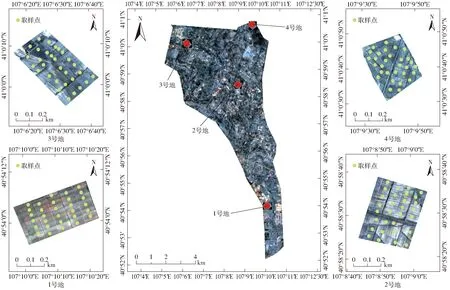
图2 试验区和采样点分布图Fig.2 Schematic of study area and soil sampling locations

表1 土壤盐分数据统计Tab.1 Summary statistics of soil salinity
1.3 遥感数据采集与处理
1.3.1无人机多光谱遥感影像采集与处理
研究所使用的无人机为大疆公司生产的经纬Matrice 600型,该型无人机搭载具有体积小、质量轻且能远程触发等特点的Mirco-MCA型多光谱相机(简称MCA),其包括蓝波段(490 nm)、绿波段(550 nm)、红波段(680 nm)、红边波段(720 nm)、近红外波段1(800 nm)和近红外波段2(900 nm)共计6个波段的光谱采集通道。无人机多光谱图像的采集时间与土样采集时间保持一致,将无人机飞行高度设置为120 m(此时对应的影像空间分辨率为0.1 m),每次飞行前在试验区放置标准白板以便对影像进行辐射标定。
使用相机配套软件PixelWrench2对相机内的无人机影像进行提取、校准和合成,最后导出tif格式的6波段多光谱遥感影像,对影像进行尺度转换,将升尺度后的多光谱影像导入ENVI 5.3软件中,并通过试验区样点的经纬度信息确定样点所在像元,提取该像元点6波段对应的像元值,并在标准白板标定后进一步计算得到相应的光谱反射率。
1.3.2高分一号卫星多光谱遥感影像采集与处理
研究采用的卫星数据源为GF-1卫星,其搭载的4台宽覆盖多光谱相机Wide Field View sensor(简称WFV)可获取16 m多光谱影像,相机组合幅宽不小于800 km,重访周期为4 d。选用与地面采样时间同步的GF-1卫星WFV数据,其影像谱段包括蓝波段(B,450~520 nm)、绿波段(G,520~590 nm)、红波段(R,630~690 nm)和近红外波段(NIR,770~890 nm)4个波段。在ENVI 5.3软件中导入下载的GF-1卫星影像,同时对影像进行辐射校正、几何精校正和大气校正等预处理操作,处理完毕后将地面样点的经纬度信息一并导入软件中以确定各采样点对应的地表光谱反射率。
1.4 光谱指数选取和计算
采用遥感影像构建的各类光谱指数作为间接指标来对盐渍化区域盐分进行评价和作图,已取得不错的效果。结合文献和经验,本文选取了常见的光谱指数SI、SI1、SI3、BI[16]、NDVI、MSAVI[17]、SR[18]、SRSI[19]、NDSI[20]、DVI[21]作为土壤含盐量监测模型的输入变量因子。
1.5 主导变异权重法及统计评价方法
针对影像窗口内的地理要素进行尺度上推时,考虑到窗口范围覆盖的像元间存在局部空间自相关性,需要对地表要素间的相互作用进行监测,降低升尺度转换后所造成的信息损失,使转换结果更符合地表真实情况。为此,有学者提出空间变异性加权算法[22],旨在将局部空间自相关性用像元值和主导空间特征值之间方差的形式加以衡量,方差越大,像元值与主要特征的距离越远,当数据从高分辨率转换到低分辨率时,该像元对应的权重也应越小,因此,权值可以定义为方差的倒数。对主导特征的不同度量导致了数据聚合的不同方法。
本研究采用主导变异权重法(Dominant class variability-weighted method,DCVW)获取局部窗口构建的趋势面的主导空间特征值,基于此主导空间特征值对局部窗口的趋势面内的地理要素进行聚合,利用Python软件编程实现对沙壕渠试验区影像的空间尺度上推。
主导变异权重法根据所构建的局部窗口的趋势面地理要素的频率分布确定主导值,取频率最大的值作为此局部窗口趋势面的主导空间特征值,计算此局部窗口趋势面中每个值与主导空间特征值间的方差,计算所得方差的倒数并将之累加,将每个值的倒数除以所得累加值的结果作为此值的权重,将局部窗口趋势面中每个值乘以其权重并累加,获得局部窗口趋势面的加权平均值。计算式为
(1)
其中
(2)
y(u)——基本地域单元内某一像素遥感信息值
w(u)——权重
y(wd)——主导空间特征像素遥感信息值
m——基本地域单元内总像素数
除此之外,本文还采用了局部平均法和最邻近法等传统的尺度转换方法对遥感影像进行空间尺度上推[23-24],2种方法对影像数据的处理在ENVI软件中完成。
通常情况下,对遥感影像数据进行尺度转换后会造成一定程度的信息损失及光谱、形状的变异,不同尺度转换方法导致的信息损失及变异程度不一,因而需要采取精度评价方法来客观衡量尺度转换后的效果[25]。现有的评价体系尚不完备,大多以尺度转换后的影像数据与高分辨遥感影像或地面实测数据进行评价指标的比较。本文主要采用均值、标准差、信息熵和平均梯度来评价遥感数据尺度上推后的效果[26-28]。
均值表示遥感影像的平均像素值。尺度转换后如果均值发生了较大变化,则表明尺度转换效果较差,因此均值越接近原始数据越好。
标准差描述了影像各像元灰度值偏离影像平均值的程度,标准差越大,意味着转换后影像的灰度级分布越分散,图像反差越大,可获取更多影像信息。
图像的信息熵E是从信息论角度反映影像信息丰富程度的一种度量方式,信息熵反映了图像携带的信息量,计算公式为
(3)
式中pj——遥感影像灰度中j值的像元数在总灰度中所占的比例
L——总的灰度级
平均梯度G能敏感地反映图像对微小细节反差表达的能力,平均梯度越大,表明影像越清晰,纹理信息越丰富,反差越好。计算公式为
(4)
式中m0、n0——遥感影像总行数和总列数
p(xi,yi)——图像第i行、第j列遥感信息值
1.6 高分一号卫星影像光谱反射率升尺度修正
由于GF-1卫星影像的光谱分辨率与无人机升尺度影像存在差异,因而需要分别对GF-1卫星4个波段进行修正以达成一体化的目的。在试验区每个采样点对应的卫星影像单个像元范围内,提取升尺度后无人机图像各波段单一像元的光谱反射率B及对应波段的卫星单一像元的光谱反射率b,参照前人研究[29],选用波段比值均值法确定卫星4个波段的修正系数Z,计算式为
(5)
式中n1——参与计算样点数量
Bi——升尺度后无人机图像各波段单一像元光谱反射率
bi——卫星图像单一像元光谱反射率
以各波段修正系数乘以对应卫星波段参量,对筛选出的模型内光谱自变量进行修正后,得到升尺度土壤含盐量监测模型。
1.7 土壤含盐量监测模型构建和评价
本文构建监测模型的数据来源有4种:基于主导变异权重法升尺度后的无人机数据、基于局部平均法升尺度后的无人机数据、基于最邻近法升尺度后的无人机数据和GF-1号卫星数据,每种数据源监测模型的变量因子分为3组:光谱波段组、光谱指数组和混合变量组。本文所用的统计分析方法为多元线性回归[30-31],所用的机器学习方法为BP神经传播网络[32-34],统计分析建模在IBM SPSS 23软件中完成,机器学习算法模型在R语言软件中完成。建模流程如图3所示。
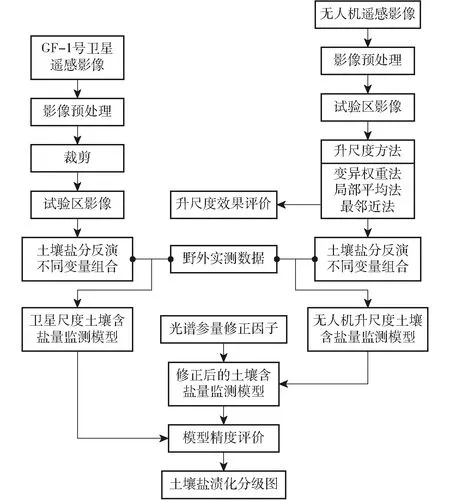
图3 建模流程图Fig.3 Modeling flowchart
关于监测模型的评价,本文利用39个样本对各类方法构建的盐分估算模型进行验证分析,对验证集的模型预测值和实测值进行拟合,采用决定系数(Coefficient of determination,R2)和均方根误差(Root mean square error, RMSE)2个指标来评价建模集和验证集的精度。R2越接近1,RMSE越小,说明模型精度越好。
2 结果与分析
2.1 尺度转换方法对无人机数据的升尺度应用
对于4块试验区无人机影像的蓝波段、绿波段、红波段和近红外波段,分别对各单波段影像采用主导变异权重法、局部平均法和最邻近法升尺度至16 m,再将各单波段影像合成为多波段影像,以试验区2号地为例,其尺度转换结果如图4所示。
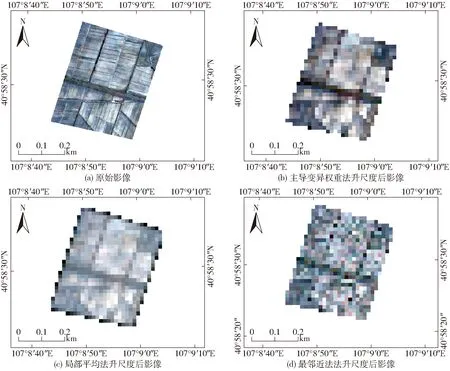
图4 无人机4波段遥感影像升尺度结果Fig.4 Upscaling results of UAV’s four-band remote sensing image
通过空间尺度上推统计评价方法对比分析无人机影像经3种尺度转换方法尺度上推后的效果。图5~8是无人机单波段影像(蓝波段、绿波段、红波段和近红外波段)在4块试验区利用3种方法实现尺度上推后与原始分辨率影像的均值、标准差、信息熵和平均梯度统计结果。

图5 试验区无人机4波段影像均值对比Fig.5 Comparison of average values of UAV four-band images in test area
从图5可以看出,每种方法尺度上推后的均值都不同程度偏离原始分辨率影像的均值,这在无人机4个波段影像上表现各异,但对于同一试验区同一波段影像,除局部平均法的均值明显偏离原始分辨率影像,主导变异权重法和最邻近法的均值变化幅度较小,基本与原始分辨率影像均值保持一致。从图6可以看出,原始分辨率4个波段影像在试验区2号地、3号地和4号地的标准差较大,说明遥感影像像元的灰度级分布分散,空间信息及纹理特征信息较为复杂且像元间变异明显,经3种方法尺度上推后无人机4波段影像的标准差在不同试验区的呈现效果不一,1号地局部平均法的标准差大于主导变异权重法和最邻近法,表示三者在分辨率为16 m的前提下,局部平均法升尺度后的无人机4波段影像的灰度级分布更广泛且像元间变异更为明显。对于2号地、3号地和4号地,主导变异权重法升尺度后的蓝波段影像、绿波段影像的标准差要高于其他2种方法,对于升尺度后的红波段影像,局部平均法在2号地的标准差最高,主导变异权重法在3号地和4号地的标准差最高,但主导变异权重法和局部平均法的标准差之间的差异不明显。对于升尺度后的近红外波段影像,局部平均法在2号地和4号地的标准差最高,主导变异权重法在3号地的标准差最高,二者的值较为接近。总体而言,相较于局部平均法和最邻近法,主导变异权重法升尺度后的4波段影像提供了更为丰富的地表要素信息。
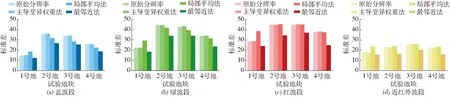
图6 试验区无人机4波段影像标准差对比Fig.6 Comparison of standard deviation of UAV four-band image in test area
从图7可以看出,经过3种方法尺度上推后的4波段影像在4块试验区的影像信息熵与原始分辨率影像信息熵相比较小,说明由于地表异质性和土地利用类型的差异,尺度上推过程会造成影像信息在一定程度上的损失,经主导变异权重法升尺度后的试验区4波段影像与其他2种方法升尺度后影像的信息熵对比分析,三者在空间分辨率为16 m的前提下,除在试验区1号地,局部平均法升尺度后4波段影像信息熵高于主导变异权重法,在2、3和4号试验区域,主导变异权重法的信息熵要高于其他2种转换方法,信息量更丰富。从图8可以看出,原始分辨率4波段影像在不同试验区的平均梯度最大,对于4块试验区,主导变异权重法升尺度后的影像的平均梯度要高于局部平均法和最邻近法,说明其对影像微小细节和纹理特征的反映更为突出,不过3种方法转换结果的平均梯度都低于原始分辨率影像,可能原因是影像像元间差异部分在尺度上推过程中被以不同形式加以模糊,其边缘信息受到干扰,因而升尺度后的影像相较于原始影像平均梯度有所减小。
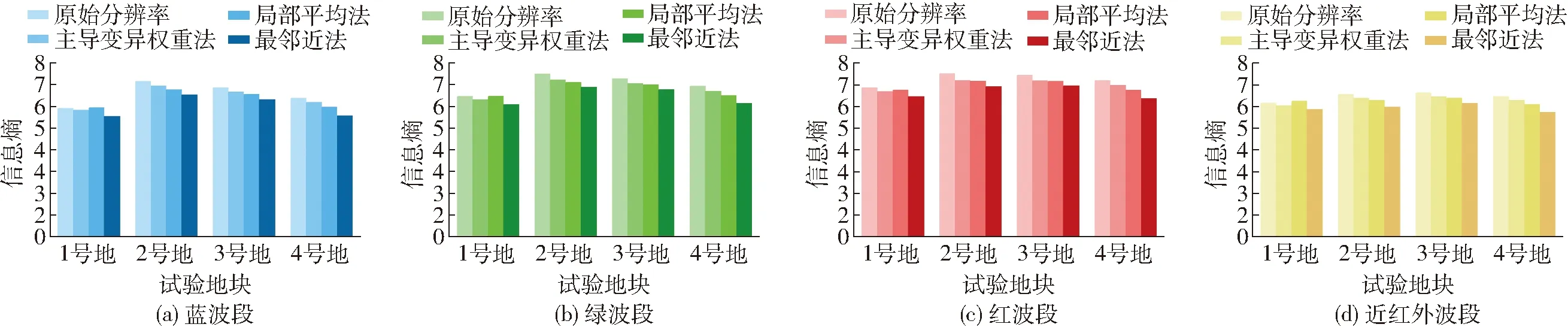
图7 试验区无人机4波段影像信息熵对比Fig.7 Comparison of information entropy of UAV four-band image in test area

图8 试验区无人机4波段影像平均梯度对比Fig.8 Comparison of average gradient of UAV four-band images in test area
综合以上分析,经由均值、标准差、信息熵和平均梯度4种统计评价指标与原始影像对比后,发现主导变异权重法在4块试验区针对4波段影像的尺度转换效果总体上优于其他2种转换方法。
2.2 土壤含盐量与光谱波段、光谱指数的相关性分析
对不同数据集的多光谱4个波段光谱反射率、10个光谱指数分别和对应的土壤含盐量进行相关性分析,得到的皮尔逊相关系数结果如图9、10所示。此外,与2.1节相同,用原始分辨率影像与土壤含盐量的相关分析结果与空间尺度上推后的影像结果作了对比。
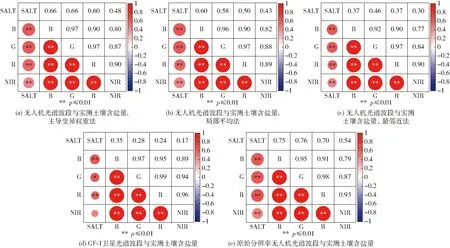
图9 不同数据源下土壤含盐量与光谱波段相关系数Fig.9 Correlation coefficient of soil salinity and spectral band
从图9可以看出,空间尺度上推后的3类无人机数据的蓝波段(490 nm)、绿波段(550 nm)、红波段(680 nm)、近红外波段(800 nm)与SSC均表现极显著相关的相关关系,其中主导变异权重法和最邻近法的4个波段与SSC的相关性从高到低依次为:G、B、R、NIR,局部平均法与SSC的相关性从高到低依次为:B、G、R、NIR,总体而言,主导变异权重法、局部平均法的蓝波段、绿波段、红波段、近红外波段与SSC的相关系数变化范围为0.4~0.7,最邻近法的蓝波段、绿波段、红波段、近红外波段与SSC的相关系数变化范围为0.3~0.5。
GF-1卫星数据4个波段与SSC的相关性从高到低依次为:B、G、R、NIR。其中蓝波段与SSC呈现极显著相关,相关系数为0.349,绿波段和红波段与SSC呈现显著相关关系,相关系数分别为0.282、0.241,近红外波段的相关系数为0.166。
从图10可以看出,主导变异权重法尺度上推后无人机数据构建的光谱指数SI、SI1、SI3、BI、NDVI、SR、DVI、MSAVI、SRSI、NDSI与SSC均表现极显著相关的相关关系,其中NDVI、SR、NDSI这3个光谱指数与SSC的相关性较低,相关系数为0.3左右;SI、SI1、SI3、BI、DVI、MSAVI、SRSI与SSC呈现出良好的相关性,这7个光谱指数相关性由高到低依次为SI、SI1、SI3、DVI、BI、SRSI、MSAVI,并且相关系数均在0.5以上,其中SI、SI1、SI3和DVI相关系数超过0.6。局部平均法尺度上推后无人机数据构建的光谱指数SI、SI1、SI3、BI、DVI、MSAVI、SRSI与SSC均为极显著相关,相关系数均在0.4以上,相关性由高到低依次为SI、SI1、SI3、BI、DVI、SRSI、MSAVI,其中SI、SI1、SI3的相关系数超过0.5,NDVI、NDSI和SR这3个光谱指数与SSC相关性较低,相关系数在0.2左右。最邻近法尺度上推后无人机数据构建的光谱指数SI、SI1、SI3、BI、DVI、MSAVI、SRSI与SSC均表现极显著相关的相关关系,这7个光谱指数和SSC的相关性由高到低排序为SI1、SI3、SI、DVI、BI、MSAVI、SRSI,其中SI1、SI3、SI的相关系数超过0.4,NDVI、SR和NDSI这3个光谱指数与SSC相关性较低,相关系数在0.2左右。
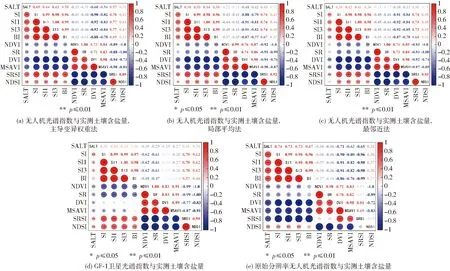
图10 不同数据源下土壤含盐量与光谱指数相关系数Fig.10 Correlation coefficient of soil salinity and spectral index
GF-1卫星数据构建的光谱指数SI、NDVI、SRSI、NDSI与SSC均表现极显著相关,相关系数在0.3左右。SI1、SI3、SR、DVI、MSAVI与SSC表现为显著相关,相关系数均超过0.2。
从图9、10可以看出,原始尺度无人机数据除了近红外波段之外其他3个波段与SSC的相关系数均在0.7以上,其构建的光谱指数如SI、SI1、SI3、BI、DVI、SRSI与SSC呈现出较高的相关性,相关系数在0.65以上,相比之下3种升尺度无人机数据与SSC相关性较低的原因可能是在尺度上推的过程中损失了部分反映盐渍土光谱特性的影像信息,具体到各种尺度转换方法应用后的影像信息损失程度也不相同,就空间尺度上推后无人机数据与SSC的相关性而言,主导变异权重法要优于局部平均法和最邻近法,这从一定角度上反映了空间变异加权算法相较于传统方法在影像升尺度应用方面的优势。
2.3 土壤含盐量监测模型
本文以3种升尺度方法的无人机影像和GF-1卫星遥感影像为基础,将蓝波段、绿波段、红波段和近红外波段4个波段作为不同数据源构建模型的第一组变量因子,记为光谱波段组;通过2.2节土壤含盐量与光谱指数的相关性分析,以及考虑到升尺度修正时无人机和卫星的模型变量因子应保持一致,综合比较后选取SI、SI1、SI3、DVI 4个相关性较高的光谱指数作为不同数据源构建模型的第2组变量因子,记为光谱指数组;同时,通过比较不同数据源选取的4个光谱波段和4个光谱指数与土壤含盐量的相关性,依据相关性排序从高到低原则,从光谱波段组选取蓝波段、绿波段和红波段,从光谱指数组选取SI、SI1,共计5个混合光谱波段和光谱指数的变量因子作为不同数据源构建模型的第3组变量因子,记为混合变量组。然后再用4种遥感图像依据3组变量因子分别构建土壤含盐量监测模型。
2.3.1不同数据源基于3个变量组的统计回归模型
将不同数据源得到的光谱波段组、光谱指数组和混合变量组分别作为模型输入自变量,对应的含盐量作为因变量,利用多元线性回归方法(Multivariable linear regression,MLR)建立基于不同变量组的土壤含盐量监测模型。相关建模及验证结果如表2所示。
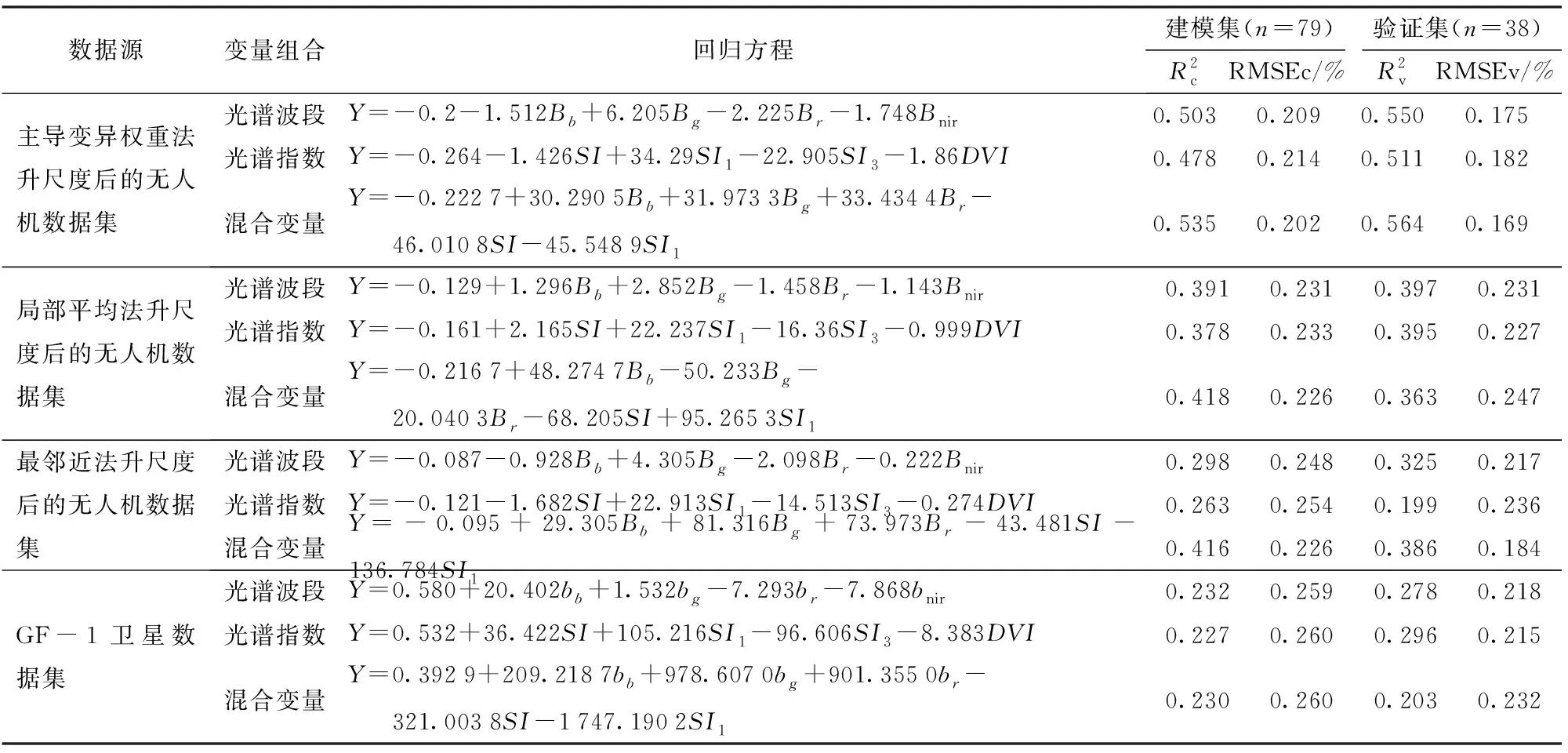
表2 不同数据源基于3种变量组合的统计回归模型Tab.2 Different data sources based on statistical analysis model of three sets of variable combinations


综合对比不同数据源基于3组变量MLR模型的建模和验证效果,发现采用主导变异权重法升尺度后基于混合变量组的无人机数据建模和验证效果相对更好且较为稳定,认为是最佳的多元线性回归含盐量监测模型。
2.3.2不同数据源基于3个变量组的机器学习模型
将不同数据源得到的光谱波段组、光谱指数组和混合变量组分别作为模型输入自变量,对应的含盐量作为因变量,利用BP神经网络(Back propagation neural networks,BPNN)机器学习方法建立基于不同变量组的土壤含盐量监测模型。相关建模及验证结果如表3所示。


表3 不同数据源基于3种变量组合的机器学习模型Tab.3 Machine learning model based on combination of three sets of variables from different data sources
综合对比不同数据源基于3种变量组合BP神经网络模型的建模和验证效果,发现采用主导变异权重法升尺度后基于混合变量组的无人机数据建模和验证效果相对更好且较为稳定,认为是最佳的BP神经网络土壤含盐量监测模型。
2.4 土壤含盐量监测模型的升尺度修正与应用
利用ENVI软件导出GF-1卫星影像下研究区各样点对应4个波段的像元值,计算修正后的光谱参数。将筛选得到的统计回归监测模型代入修正后的光谱参数,对于筛选得到的机器学习模型则直接将修正后的光谱参数、实测盐分数据放入机器学习模型中进行验证,然后根据R2和RMSE判断模型修正效果。

将已修正的光谱波段和光谱指数分别代入2个筛选得到的监测模型,结合实测土壤含盐量进行验证。其中多元线性回归监测模型:Y=-0.222 7+30.290 5Bb+31.973 3Bg+33.434 4Br-46.010 8SI-45.548 9SI1,其验证R2为0.420,RMSE为0.219%。BP神经网络监测模型的验证R2为0.371,RMSE为0.235%。
对比分析2个模型的验证效果,发现基于混合变量组的多元线性回归模型具有更好的适用性和稳定性,选用该模型进行研究区的土壤盐分反演,得到研究区的土壤含盐量分布图如图11所示。其中非盐渍化土壤面积占比为24.86%,轻度盐渍化土壤分布较广,面积占比达63.99%,重度盐渍化土壤在研究区分散存在,在北部、中部和南部都有分布,但面积占比相对较小,为9.67%,盐土则分布得更为零散,面积仅占1.48%。
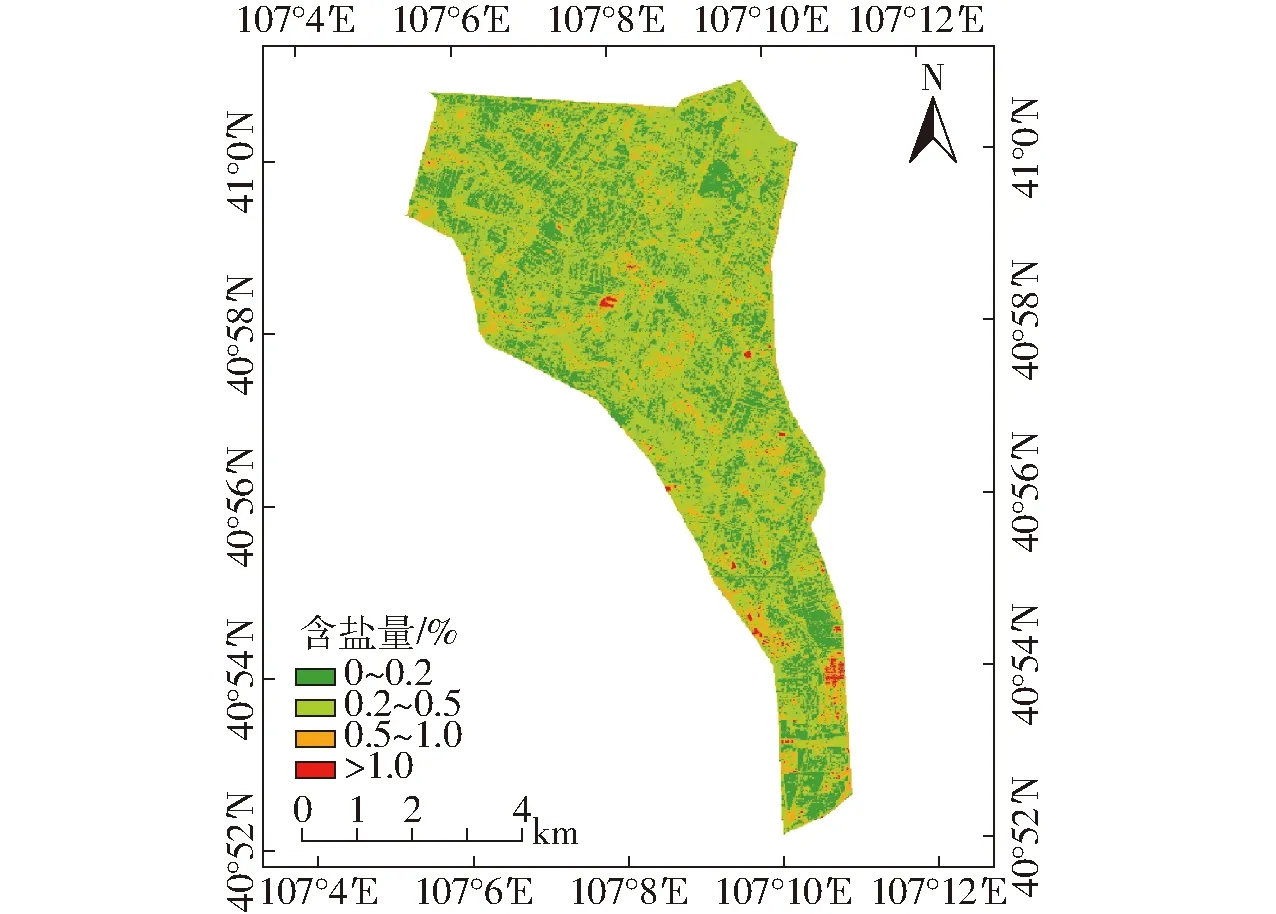
图11 研究区土壤含盐量升尺度反演图Fig.11 Upscale inversion map of soil salinity in study area
3 讨论
将遥感影像的空间信息从原始尺度转换到研究所需的地域单元尺度时所采用方法会显著影响像元聚合结果,进而影响基于聚合结果的土壤盐渍化信息评估。对于地表非均质且空间异质性复杂的尺度转换研究,传统的尺度转换方法可能会面临应用上的局限性,如郝大磊等[35]认为局部平均法仅适用于相对均一的地表,针对其他复杂地表环境下垫面的实际变化情况反映能力不足。内蒙古河套灌区气候属于典型的干旱半干旱大陆性气候,地表蒸发大,研究区内地表盐渍化信息分布不均且强度差异明显,若将单元范围内的像元信息简单进行平均化,一定程度上会弱化地表盐渍化信息本身的自相关性和变异性,导致处理结果与实际情形产生偏差,故选用合适的尺度转换方法准确评估盐分信息具有重要意义[36],针对盐分信息的主导空间特征和过程成为一个重要的研究突破点。冯娟[37]曾用主导变异权重法对趋势面尺度上推模型进行改进,得到的升尺度结果与盐渍化定量监测的MODIS-SRSI影像空间分布一致性最好。因此本文尝试引入了空间变异算法,并和传统的尺度转换方法做比较,将试验区无人机各波段影像进行升尺度转换,然后采用不同的评价指标来衡量各种方法的转换效果。结果表明主导变异权重法能有效地实现遥感数据的尺度上推,在保持原始影像数据大部分信息量的基础上,较为合理地体现了数据的局部细节及其纹理特征,由此可看出主导变异权重法的应用对于无人机到卫星升尺度转换的研究领域是一种有益尝试。本文还对GF-1卫星数据和3种无人机升尺度数据集的光谱波段、光谱指数与实测盐分数据进行相关性分析。基于前人的研究成果[38],挑选与实测盐分数据相关性较高的光谱波段和光谱指数,针对不同数据源分别构建3个模型变量输入组,发现升尺度后无人机数据集监测模型精度普遍优于GF-1卫星数据。其中主导变异权重法升尺度后的无人机数据集在统计模型和机器学习模型的表现上均好于其他3种数据源,说明考虑周边像元的异质性,并在尺度转换过程中将范围内各像元信息以权重形式加以体现可突显区域内盐分信息的光谱特征,从而在提取影像光谱反射率时,其结果较为客观地反映研究区地表真实的盐渍化情况,有助于提升模型反演精度。
在无人机与卫星协同监测土壤盐渍化研究方面,陈俊英等[39]将原始尺度无人机数据建立的趋势面应用在卫星数据上,其构建的升尺度模型反演精度比直接采用卫星模型反演精度更高。本文则依据升尺度后无人机影像与卫星影像之间的关系对模型加以修正。相较于奚雪等[40]在构建星机一体化的滨海麦区土壤含盐量监测模型时,利用无人机原始分辨率光谱波段对Sentinel卫星光谱波段进行修正的过程中,需要提取Sentinel卫星样点所在单个像元范围内对应的无人机平均光谱反射率。本文对该方法进一步改进,首先是对无人机数据进行升尺度转换,使其与GF-1卫星数据处于同一尺度,两者所对应的像元尺寸保持一致,再通过波段比值均值方法,对卫星光谱波段修正以期达到一体化的目的。结果表明,将最佳的无人机监测模型,即基于混合变量组的多元线性回归模型,应用于实现一体化后的GF-1卫星数据,可有效提高后者对土壤盐渍化的监测精度。ZHANG等[41]利用无人机模型结合波段修正后的Sentiel-2A卫星数据对黄河三角洲土壤盐分进行反演,发现当模型输入变量为敏感波段和光谱指数时构建的多元线性回归模型反演效果要好于其他变量组构建的模型,这与本文的研究成果相符合。
4 结论
(1)通过分析主导变异权重法、局部平均法和最邻近法3种空间尺度上推方法应用于试验区4波段影像后,其升尺度影像均值、标准差、信息熵和平均梯度与原始影像之间的比较结果,发现主导变异权重法在各项指标对比下总体上最为接近原始影像,说明主导变异权重法能较好地保持原始遥感数据的统计特征,更适用于无人机-卫星遥感针对区域盐渍化空间尺度上推研究。
(2)对不同数据源的表层土壤含盐量进行定量监测,结果表明主导变异权重法构建的升尺度土壤含盐量监测模型反演精度好于传统的局部平均法和最邻近法,同时也优于GF-1卫星数据,其中不同输入变量组合构建的模型精度存在差异性,表明尺度转换方法和变量组合两种因素在一定程度协同作用于升尺度模型,当确定合适的转换方法和变量组合后可最大程度发挥模型效力。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
农业工程学报(2022年8期)2022-08-08
航天返回与遥感(2022年2期)2022-05-12
黑龙江大学自然科学学报(2022年1期)2022-03-29
遥感学报(2022年2期)2022-03-09
知识窗(2018年6期)2018-06-26
中华建设科技(2017年7期)2017-09-07
神州·上旬刊(2017年7期)2017-08-22
科技创新与应用(2017年6期)2017-03-23
