
简易星轮式爬楼轮椅的结构设计及运动仿真
2022-11-07 07:09:26张玉叶赵蓓蓓
濮阳职业技术学院学报 2022年5期
张玉叶,张 靖,赵蓓蓓
(1.苏州托普信息职业技术学院,江苏 苏州 215311;2.空军济南航空四站装备修理厂,山东 济南 250022)
我国目前已进入老龄化社会,截至2017年底,中国60岁及以上老年人口已超过2.41亿,到2050年预计将达到4.87亿[1]149。轮椅是很多老年人和相关的肢体残疾人的代步工具,目前市场上的很多轮椅体积都比较大,并且没有爬楼功能,在老年人出行的时候,都需要相关的辅助人员。
世界上的第一款爬楼机构就是采用星轮爬楼方式,最初是由美国的一位工程师开发设计的,结构上比较简单实用。履带式爬楼机构是继星轮爬楼机构之后使用最多的爬楼机构,该种爬楼机构相对于星轮式具有很好的适应性。支撑式爬楼梯轮椅机构工作原理主要来自于仿生学,模仿人爬楼的动作,两个支撑装置分别支撑,交替向前,进而实现爬楼动作。
王占礼等[2]56通过单轮毂电机驱动三星轮组进行爬楼翻转试验,爬楼机构结构紧凑,动作灵活,但动力有所欠缺,且对翻转过程中的平衡性考虑较少;李育文等设计了履带式爬楼轮椅,虽稳定性及其对各种路况的适应能力有所提高,但也加剧了楼梯的磨损[3]135;Quaglia等将三星轮与履带相结合,实现自动爬楼,但履带造成楼梯磨损的不足仍存在[4]84;周秋雨等通过在驱动轮上安装杆件翻转实现轮椅爬楼,但杆件前端橡胶套与台阶接触面积小,受力集中,易损坏[5]74。
本文针对目前轮椅爬楼较为困难和爬楼轮椅舒适性的不足,设计了一款以星轮为基础的爬楼轮椅,该轮椅爬楼方便,在使用时可保证乘坐者的舒适性。
一、爬楼机构结构设计与工作原理
(一)爬楼机构的选择
依据目前爬楼机构的种类,综合对比各种爬楼机构类型,其结果如表1[6]286所示。

表1 不同爬升越障机构的对比
从表1的对比分析中可以看出,在所有类型中星轮式的爬楼机构整体评价较好[7]25-29,因此本文选择星轮机构作为爬楼机构的主要装置,该种机构具有爬楼稳定、适应性强、结构简单等优点,并且在平面行驶的时候,可通过电机完成动力的提供。
(二)爬楼机构尺寸设计
首先需要对相关的关键部件进行尺寸设计,因此在本文中,首先就要确定的是星轮尺寸和星轮架尺寸,星轮和星轮架的尺寸主要是依据楼梯来进行确定,若爬楼机构尺寸过大,则爬楼效果较差,会与台阶的台面发生接触干涉;如果尺寸太小,此时虽然爬楼效果较好,但是在平面行驶的状况下,其适应能力较差,遇到坑洼地面,则轮椅无法行驶,因此对爬楼机构的尺寸设计必须实用,需做较为深入的分析。
通过查阅文献《建筑楼梯模数协调标准》,确定国内普通台阶的高度不超过20cm,不低于14cm,台阶宽度不超过30cm,不低于20cm,并且宽度和高度需要满足下式:

式中:a-台阶高度;
b-台阶宽度。
因此若需要保证星轮爬楼机构的适应能力,在最小宽度的台面获得稳定支撑,台阶的支撑宽度应该至少为20cm。依据该条件,可以确定星轮的直径必须小于20cm,由于轮毂电机可以确定,因此另外两个星轮尺寸需要依据轮毂电机确定。通过查阅《机械设计手册》第六版,本文选用电机齿轮为19cm,因此星轮的直径也为19cm。
通过公式1的条件,从而可确定踏步宽度bmin=20cm的时候,则可以确定的是踏步高度amin=14cm,踏步高度amax=20cm。可以看出爬楼高度和台阶宽度呈现反比的关系。
在图1中,星轮半径为r,轮架臂长为R,星轮中心距为l,星轮中心和楼梯边缘之间的距离为x,依据图1分析可以得到下式:
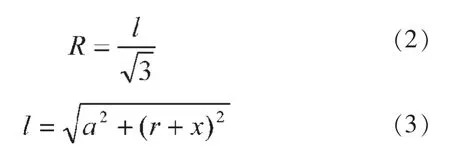
取a=amin,b=bmin,又由已知条件可知r+x≤20cm,得到:Rmax=14.1cm;
同理取a=amax,b=bmin时,同上可以得到:Rmin=9.7cm。
最终确定星轮臂长R=12cm。
由图1可以看出,两个星轮安装相切的时候,则星轮尺寸为最大:

代入a=amax,b=bmax时得出rmax>r,所以上文中的r=9.5cm较为合理。
通过图1可以看出星轮尺寸和轮架尺寸为固定值的时候,可以推出关于轮臂宽度公式:

图1 星轮机构主要参数示意图

将上述固定数值代入公式5,从而可以计算出t=4cm,因此星轮臂宽2t=8cm。
通过上文的计算,最终可以确定星轮机构的主要参数尺寸:R=12cm,r=9.5cm,t=4cm。
(三)爬楼机构传动设计
在爬楼机构进行爬楼的时候,机体处于下倾的状态,因此其所承受的扭矩等力也较大,为了保证整体质量和体积较小,以减少爬楼负载,因此需要使结构尽量地紧凑,在机械设计上需要设计有链传动、涡轮蜗杆和齿轮传动等机构。
通过对各个传动机构的分析,最终本文采用行星齿轮传动机构,该机构具有噪声小、传动效率低等特点。
传动系统的机构原理如图2所示,本机构传动系统由两级减速构成,整体设计紧凑,第一级采用锥齿轮传动,第二级传动采用星轮差速传动。传动系统中所采用的齿轮均为标准的渐开线齿轮,齿轮的模数均为2mm,通过图2可以计算得出:
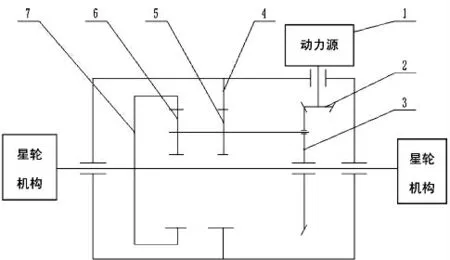
图2 行星轮系机构传动原理
首先固定齿轮4的齿数为70,因此该齿轮直径可以通过模数计算得出,其结果为140mm,本文取其传动比为10,因此依据差速传动比计算公式得:

此外依据2K-H行星轮系装配条件,从而可以得到公式7:
在上式中S、Z7和Z6均为相关的公因式,其中np为行星轮个数,本设计上该数量取3,其次依据公式得:
从而可得出轮7的齿数为67,依据模数,从而可以计算出轮7直径为134mm,依据上式从而可以计算得出轮5的齿数为22,从而可以计算出其直径为44mm。在安装上轮5和轮6固定安装在一个轴上,因此为了满足以上条件,从而可以计算出轮6的齿数为20。
二、三维建模
本文所设计的爬楼轮椅结构复杂,其中所涉及的零件较多。本文中对于模型的建模采用UG软件对其进行三维建模。
星轮机构是爬楼机构中最为重要的一种机构,该机构的设计决定爬楼是否能够成功,该系统中的星轮机构包括前星轮与后星轮,前星轮只是三个普通的轮椅车轮组合在一起,而后星轮则是接受来自电机的动力,从而驱动整个机器进行工作,因此后星轮作为驱动轮与前星轮的设计有所不同,后星轮的三个工作轮,主要是三个带轮,需要通过带传动驱动其进行工作。在三个星轮中间处设计一个原动带轮,该带轮的主要动力来源于主轴。通过主轴的转动,从而带动原动带轮转动,带动上下两侧的张紧轮进行转动,最终带动三个带轮转动,从而驱动整机进行爬楼。其三维建模如图3所示。
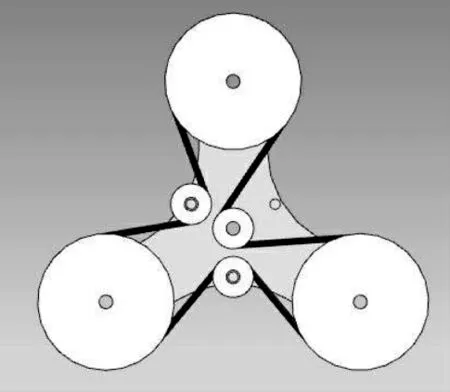
图3 后星轮三维模型
本文所设计的爬楼轮椅主要采用电驱动的方式对其进行驱动,通过直流电瓶对直流电机进行驱动,电机通过带动齿轮转动,最终经过二级齿轮传动带动主轴转动,从而带动星轮机构运动。此外,还设计了电机固定架,其三维模型如图4所示。
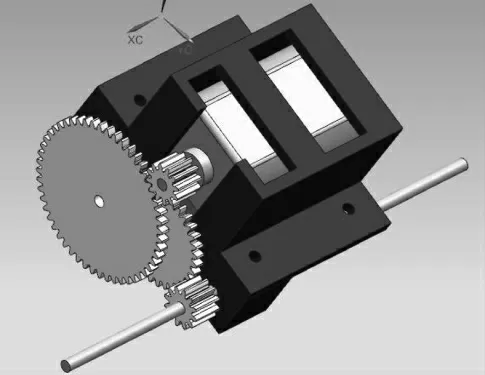
图4 传动系统三维模型
在爬楼轮椅进行爬楼的时候,整个轮椅一定会发生向下倾斜的状态,为了保证爬楼的安全性以及乘坐者的乘坐舒适性,乘坐者的位置也要保持向下倾斜的状态。因此椅座与机架之间的连接方式主要是采用滑轮的方式进行连接,整机机架如图5所示。

图5 整机机架
座椅的安装方式是将两个轴穿过座椅,因此在工作的时候,通过滚动轴承在滑轨之间的滑动,即可进行滑动,其最终模型如图6所示(图6见下页)。

图6 爬楼座椅三维模型
三、爬楼机构的运动仿真
笔者对该爬楼机构进行ADAMS运动仿真,在软件中设初始的轮毂转速为55rom,三个轮毂所受到的合力为370N/m,将该项数据代入ADAMS中进行仿真分析,从而可以得到轮毂角速度的仿真结果如图7所示。

图7 轮毂角速度
依据相关的数据,对爬楼机构的执行机构进行分析。由图7可以看出,轮毂角速度变化较为频繁,但是随着时间不断的推进,虽然数值一直在波动,但是变化量较小,整体稳定在534o/s。轮毂理论角速度通常为527o/s,理论计算的数值和仿真所得到的结果,相差较小,因此说明该种仿真结果比较可信。通过仿真计算,该爬楼机构的传动比主要依据齿轮传动和星轮之间的差动所决定,上述理论在计算中,减速器为5∶1,伞齿轮传动比为3∶1,行星齿轮差速器传动比为11∶1,因此该种减速比为165∶1。
本文利用刚体动力学方法[8]68,将其转换成瞬态问题,该种方法可以较为简单地分析出传动轮齿的刚度和强度,施加相关的受力条件,其分析结果如图8和图9所示。

图8 转化等效应力值

图9 位移变形量
利用ADAMS软件对爬梯机翻转爬升系统,在软件中进行了攀楼辅助装备的机械结构设计和攀楼轮毂运动的仿真分析,从数据结果分析得到本方案设计的攀楼辅助设备的攀楼机可行性较高。应用ADAMS软件中的相关仿真模块对输出齿进行仿真分析,验证整机机械结构运动可靠性,并为之后的攀楼辅助设备机械结构的改进优化提供了依据。
四、结论
本文针对国内外研究、应用现状,创新性地提出了一种利用行星轮系爬楼的爬楼轮椅机构,并对其整体方案的设计以及各种关键问题作了深入地研究分析。主要完成了:
1.爬升机构的设计。在众多爬楼方案对比中选择星轮作为爬楼机构的主要爬楼装置,并对其进行尺寸设计与传动设计。
2.完成对模型的三维建模,应用UG三维建模软件,对轮椅的各个部分进行建模,最后完成对模型的装配处理。
3.应用ADAMS软件对模型进行运动仿真,确保爬楼轮椅设计的可行性。
猜你喜欢
祝您健康(2024年3期)2024-03-03 13:27:39
上海涂料(2021年5期)2022-01-15 06:09:26
数学小灵通·3-4年级(2020年3期)2020-06-24 05:50:52
新世纪智能(高一语文)(2019年10期)2020-01-13 05:13:44
机械设计与制造(2018年2期)2018-03-05 12:33:02
青岛画报(2018年1期)2018-02-23 12:07:50
方圆(2017年24期)2018-01-17 20:55:33
天津诗人(2017年2期)2017-11-29 01:24:24
制造技术与机床(2017年10期)2017-11-28 05:24:18
制造业自动化(2017年2期)2017-03-20 14:26:14
