动态事件触发的无人机非线性系统故障检测
2022-11-07 10:51盖文东李珊珊张桂林
控制理论与应用 2022年8期
盖文东,李珊珊,张桂林,张 婧
(山东科技大学电气与自动化工程学院,山东青岛 266590)
1 引言
无人机(unmanned aerial vehicle,UAV)以其独特的优势在军事、运输和无线通信等领域的应用日益广泛[1].随着UAV的广泛应用,保障UAV飞行控制系统的安全性和可靠性尤为重要,快速检测故障是保证UAV 系统安全、减少经济损失的重要前提[2].对于高空、长航时无人机,需要通过通信网络与地面站进行数据交互,以便在地面站计算机中实现故障检测算法,这是一个典型的网络化控制系统.
UAV飞行控制系统的故障检测(fault detection,FD)已取得丰富的研究成果,如文献[3-4].其中Hi/H∞优化方法是一种传递函数矩阵范数比型的鲁棒性优化准则函数,目前许多鲁棒故障检测方法都在该优化准则下设计残差发生器,使故障检测滤波器在对干扰鲁棒的同时对故障具有敏感[5].文献[6]中,针对飞机惯性测量单元,设计非线性干扰观测器来实现故障检测.文献[7]中,针对无人机发动机中螺旋桨、轴承等故障,采用信号预处理、机器学习等方法进行故障检测.文献[8]中,针对一类具有参数未知或干扰的非线性系统故障检测问题,采用神经网络等对非线性系统进行逼近.本文研究的高空、长航时无人机,需要通信网络实现地面站与无人机之间的数据传输,持续的通信势必浪费有限的网络资源.
传统的基于时间驱动的通信方式势必会造成不必要的通信资源浪费,为减少资源浪费,事件触发机制引起广泛关注[9].然而,对于事件驱动的控制系统,由于采用非均匀采样模式[10],使故障检测变得更加困难.文献[11]中,针对一类非线性离散多输入多输出系统,在事件触发机制的基础上设计最优控制器.文献[12]中,针对时滞半Markov跳变神经网络系统,设计事件触发的故障诊断方法,将故障检测问题转化成H∞滤波问题.文献[13]中,针对离散化网络控制系统,综合考虑事件触发条件、数据丢包和时变时滞,将故障检测滤波器设计转化为H∞滤波问题.文献[14]中,针对事件触发的线性变参数离散时间动态系统,提出一种混合H-/H∞形式减小干扰和控制输入对残差的影响,并增强故障的灵敏度.
事件触发的故障检测过程中,非触发时刻数据与实际系统数据存在误差,即事件传输误差,势必对故障检测性能造成影响.文献[15]中,综合考虑未知扰动、故障和事件触发传输误差的影响,设计一种最优事件触发故障检测折中方法.文献[16]中,针对线性离散系统,设计事件触发故障检测滤波器,并将其转化为Hi/H∞优化问题,实现故障检测滤波器残差与事件传输误差的解耦,但并未考虑如何消除Zeno现象.
上述文献中考虑的事件触发机制为固定阈值的静态事件触发机制,为进一步减少网络控制系统中的通信负担,动态事件触发机制引起广泛的关注和讨论[17].文献[18]中,针对带有量测噪声和未知干扰的离散系统,设计一种动态事件触发机制和最优事件触发H∞故障检测滤波器,进行事件触发故障检测滤波器的同步设计.文献[19]中,针对非线性切换系统,设计一种动态事件触发机制来节约计算机和通信资源.但这些方法均未考虑事件传输误差的影响.
可见,针对UAV非线性姿态系统,在动态事件触发机制下,如何避免事件触发传输误差对故障滤波器残差信号的影响,以及消除Zeno现象等相关研究较少.本文提出一种结合动态事件触发机制的无人机非线性系统Hi/H∞故障检测方法.主要贡献如下:
1) 提出一种基于动态事件触发的故障检测方法,该方法可以实现残差与动态事件触发传输误差的完全解耦,并有效地消除Zeno现象;
2) 将动态事件触发故障方法转化为Hi/H∞优化问题,利用Riccati方程计算最优解;
3) 针对四类执行机构故障,该方法可实现网络化环境下,无人机非线性姿态控制系统故障检测.
2 UAV非线性系统模型及问题描述
2.1 UAV系统故障模型
考虑一类固定翼UAV,其非线性姿态系统模型如下所示:

式中:ωx,ωy,ωz为UAV在机体坐标系中滚转角速度、偏航角速度和俯仰角速度;Mx,My,Mz为沿机体轴的气动力矩;Ix,Iy,Iz分别为UAV的滚转转动惯量、偏航转动惯量和俯仰转动惯量,Ixy为惯性积;ρ为空气密度,S为机翼参考面积,V为飞行速度,L为翼展,bA为机翼平均气动弦,mx为滚转力矩系数,my为偏航力矩系数,mz为俯仰力矩系数.mx,my,mz为式(3)所示非线性函数.
式中:Cmx(·),Cmy(·),Cmz(·)为非线性函数,α为迎角,β为侧滑角,ωxg,ωyg,ωzg为风干扰沿机体轴的梯度.
选取状态变量、测量输出、控制输入分别为

式中:γ,ψ,θ分别为飞机的滚转角、偏航角和俯仰角,δx,δy,δz分别为副翼偏转角、方向舵偏转角和升降舵偏转角.
典型的UAV执行机构故障包括舵面卡死、控制效力损失和偏差故障.UAV执行机构故障由式(4)描述为

式中:u为控制输入,uf为实际输入,l1为对角矩阵.l1=I表示没有乘性故障发生,若l1且对应的对角线元素在(0,1)区间,则表示对应舵面发生控制效力损失故障,为乘性故障.l2表示舵面偏差故障,为加性故障.对UAV 非线性模型(1)进行欧拉离散化.考虑执行机构故障的UAV非线性姿态离散系统模型为
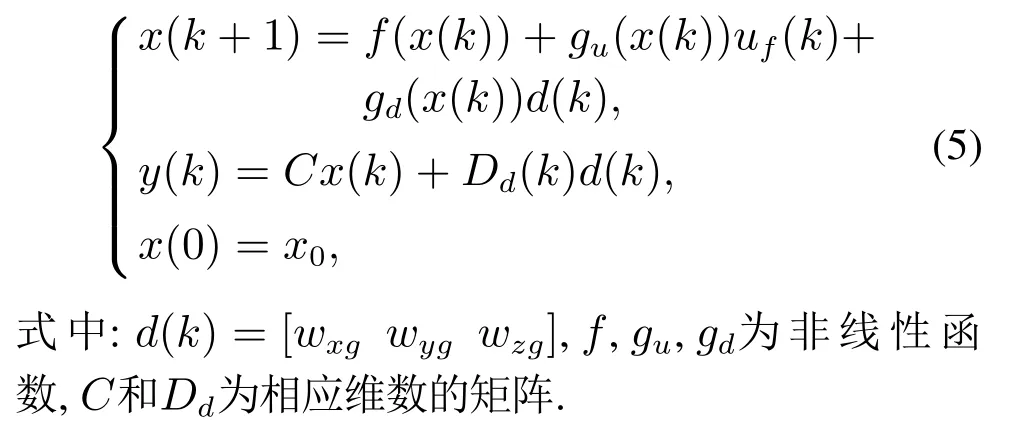
2.2 动态事件触发机制
动态事件触发的无人机故障检测系统结构如图1所示.动态事件触发器决定是否将采样的控制输入和测量输出传输到地面站,并保存最近传输数据包.地面站使用这些数据完成故障检测.
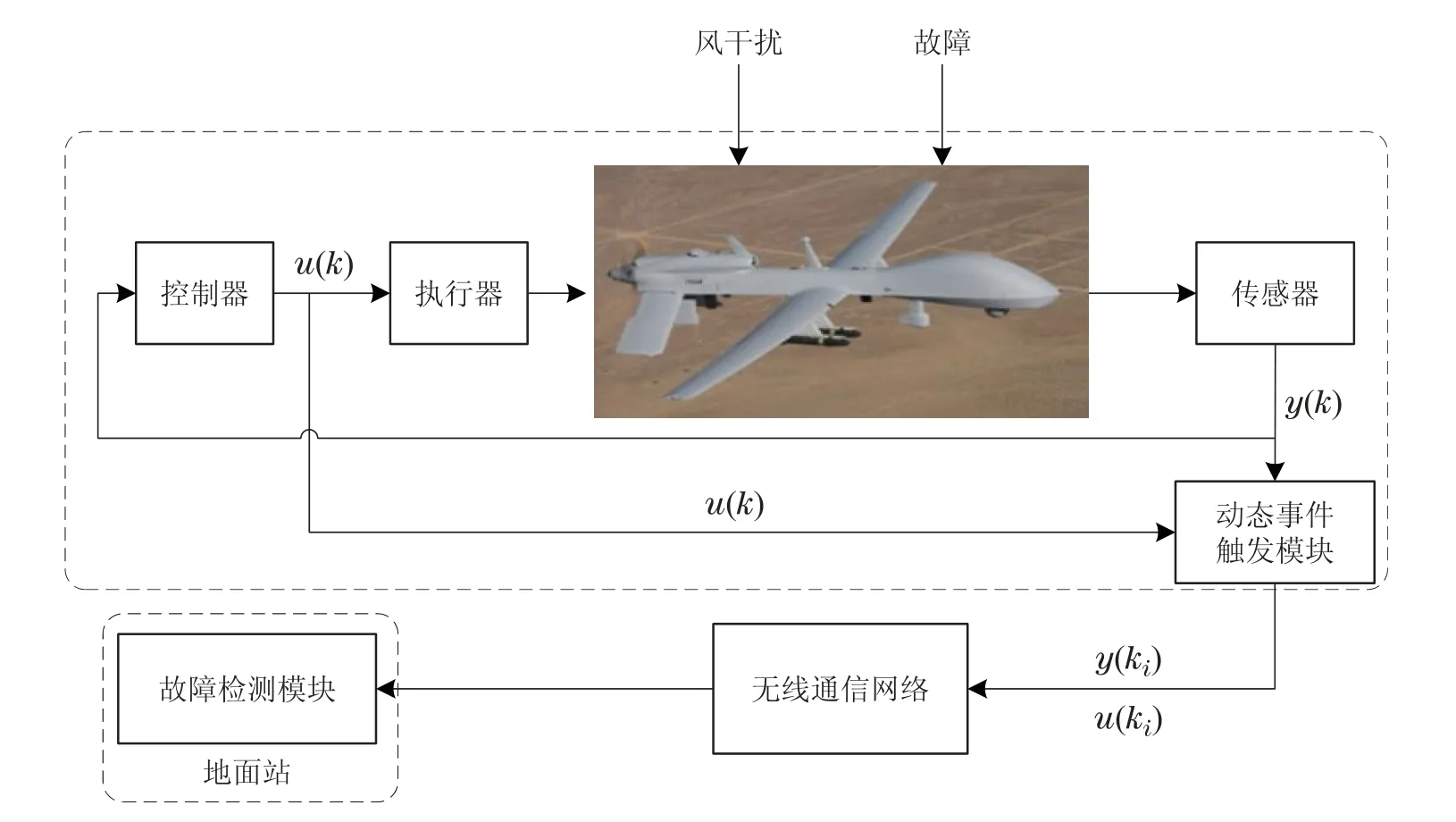
图1 动态事件触发的无人机故障检测系统结构Fig.1 Structure of dynamic event-triggered UAV FD
考虑动态事件触发条件以确定是否将测量输出y(k)传输到故障检测模块.在设计的动态事件触发机制中,下一个触发时刻ki+1由式(6)确定.
式中:ki为最近事件触发时刻,Ω ∈Rq×q为动态事件触发权重矩阵,σ>0为事件触发器阈值,θ ∈为待设计参数,y(ki)为最近传输测量输出,y(k)为当前采样数据.若式(6)成立,y(k)记为y(ki+1),并传送给故障检测模块.若不等式(6)右侧不考虑动态变量η(k),则动态事件触发机制简化为固定阈值的静态事件触发机制.
η(k)为正定的内部动态变量,满足以下微分方程:
式中:φ为局部Lipchitz连续κ∞函数,η0∈R为待设计参数.故障检测模块的输入数据通过动态事件触发条件式(6)更新.由于动态事件触发下会丢失部分数据,致使故障检测模块在非触发时刻数据与实际数据存在差异,将该数据差异定义为事件传输误差ey(k),

由于动态事件触发故障检测滤波器的构建需要系统控制输入的相关信息,故将无人机姿态控制系统的控制输入u(k)与测量输出y(k)通过动态事件触发模块打包传输到地面站故障检测模块.本文提出的动态事件触发故障检测方法,是利用可获得的u(ki)和y(ki)构建残差发生器和残差评估函数,消除事件触发传输误差对残差信号的影响,并消除Zeno现象.
3 动态事件触发的Hi/H∞优化故障检测方法设计
将无人机非线性姿态系统模型式(5)在x(k)=(k)处进行泰勒级数展开,并略去其高阶项
利用泰勒级数展开、忽略高阶项的处理方法,将无人机非线性模型式(5)转化为线性模型式(11),会带来模型误差,影响故障检测性能.这里将其影响归纳为系统干扰.由UAV线性姿态系统模型式(11)可知,在事件触发时刻ki+1的系统状态可以表示为

设计如下动态事件触发残差发生器.仿照式(13)可得事件触发时刻ki+1的系统状态估计如下:
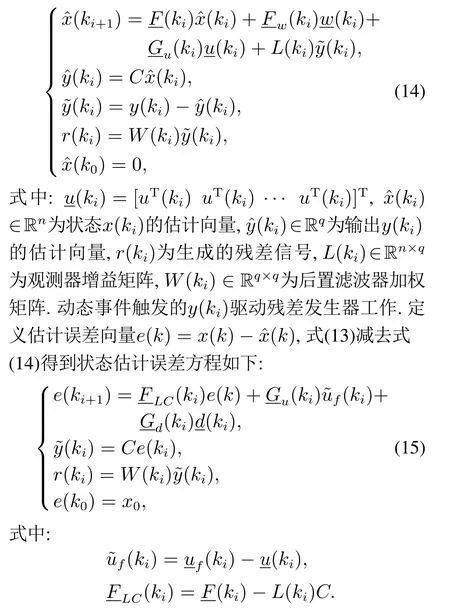
可见,式(15)所示的故障检测滤波器实现了残差r(ki)与动态事件触发传输误差ey(k)的完全解耦.
动态事件触发故障检测的关键是合适的L(ki)和W(ki)矩阵,使残差r(ki)对扰动鲁棒同时对故障敏感.

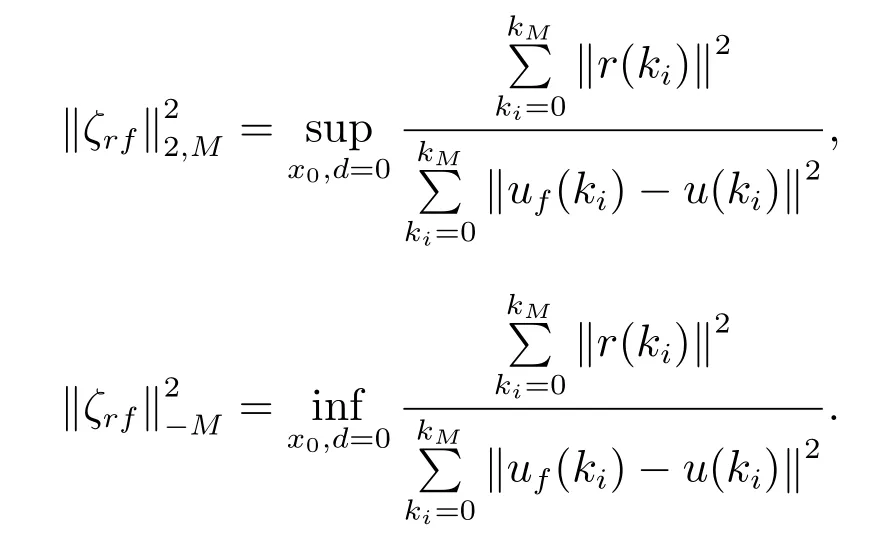
同样的,为评估式(14)中残差对故障的灵敏性,分别定义故障对r(ki)可能的最坏情况和最好情况.假设x0=0和d=0,定义最坏和最好情况的敏感性指标‖ζrf‖2,M和‖ζrf‖-M,即
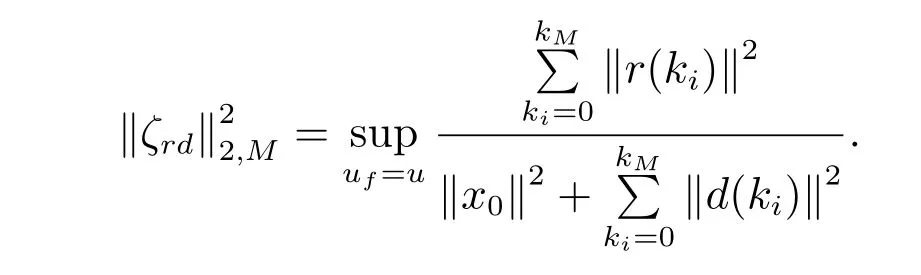
为实现鲁棒性指标和灵敏性指标之间折中设计,分别设计最坏情况和最好情况灵敏性/鲁棒性比率,由式(14)得到的残差需满足以下两个目标函数:

满足式(16)的残差发生器(14)称为动态事件触发H∞/H∞故障检测滤波器,满足式(17)的残差发生器(14)称为H-/H∞动态事件触发故障检测滤波器.
3.1 动态事件触发Hi/H∞故障检测滤波器设计
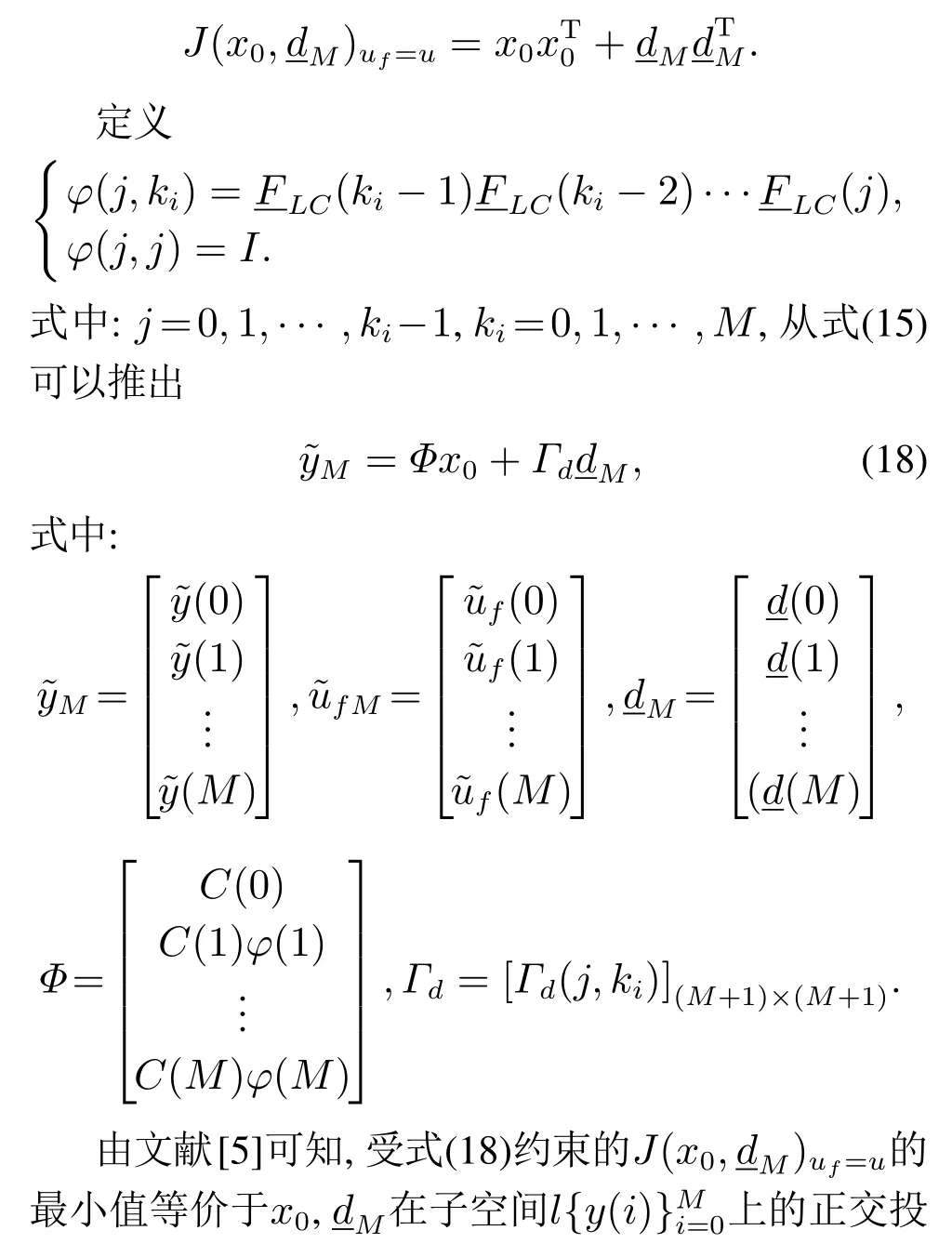
无故障假设下,令


3.2 残差评价方法
残差评价是对动态事件触发残差发生器式(14)生成残差进行数据处理与故障检测的重要环节.定义
式中:ki为当前事件触发时刻,N为移动时间窗口.JN(r(ki))的计算需要ki-N到ki时刻的数据,N越大,JN(r(ki))越平滑,但同时也越滞后,对故障的灵敏性越低,导致故障漏报.N越小,JN(r(ki))越陡峭,实时性更好,对故障的灵敏性也更高,但同时可能发生故障误报,将干扰视为故障.在故障检测中,误报率和漏报率难以同时保证,为了减少漏报率,误报率必须做出一定的让步.因此,定义以下的阈值确定方法:

式中i=1,2,···,M.M为动态事件触发条件式(6)的触发次数.E()的均值和均方差分别计算为
可以将阈值选择为

根据式(35)(37),残差评价方法表述为

3.3 Zeno现象的消除
Zeno现象是指在有限的时间间隔内存在无限数量的事件.对于所设计的动态事件触发故障检测方法,Zeno现象可能会导致故障检测模块的测量输入出现误差.因此,本节考虑如何消除Zeno现象.
定义1如果触发时间ki+1-ki >1,则动态事件触发系统中不存在Zeno现象,即最小的事件触发间隔大于离散系统的采样周期[20].
定理1如果存在适当的参数,使ε=>1成立,则本文提出的动态事件触发故障检测方法可以消除Zeno现象.
证首先,因为系统本身是离散系统,所以Zeno现象的消除主要是证明

由式(8)可知,动态事件触发传输误差ey(k)大小取决于y(ki),因此,不能将ey(k)视为有界扰动.定义

由式(6)可知,对于∀k ∈[ki,ki+1),

基于以上分析,本文提出的动态事件触发故障检测方法可归结为以下算法1.
步骤1设置移动时间窗口N和残差评价阈值Jth.阈值根据式(36)-(37)计算得出.由式(32)(34)(14)计算W(k0),r(k0).
步骤2当式(6)成立时,测量输出y(ki)将传输到故障检测模块,计算动态事件触发间隔.式(31)-(34)计算L(ki),P(ki)和W(ki).
步骤3根据步骤2计算出L(ki),P(ki)和W(ki),构建ki时刻动态事件触发残差发生器,由式(14)计算残差信号r(ki),式(35)给出残差评价函数JN(r(ki)),再由式(38)进行故障检测.
步骤4当再次满足动态事件触发条件式(6)时转到步骤2并记i=i+1.
4 仿真实验
在MATLAB仿真环境下,以某固定翼UAV非线性姿态控制系统为例验证方法的有效性,带有舵面故障的UAV非线性姿态控制模型如式(5)所示,其参数为
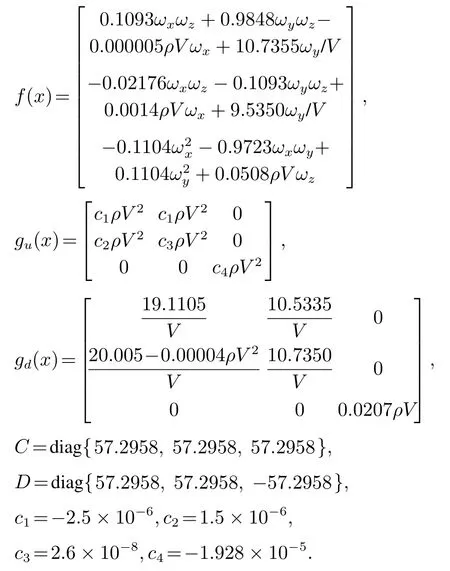
考虑存在常值风干扰,由式(43)给出

动态事件触发条件式(6)的相关参数设置为:Ω=I,σ=0.001,θ=0.6,η0=-0.4,φ=1.仿真时间步长为90,采样周期T=0.5 s,移动时间窗口N=20,阈值Jth=17.0408.
分别采用静态事件触发故障检测方法[16]和本文提出的动态事件触发故障检测方法(算法1)进行以下4种类型的故障检测,其中静态事件触发条件的相关参数与动态事件触发条件式(6)的参数保持一致.
1) 升降舵控制效力损失故障(故障1).
考虑UAV升降舵在k=60时发生10%控制效力损失的乘性故障情况,结合式(4)的定义,即

动态事件触发间隔与静态事件触发间隔如图2所示,相较于等周期采样,动态事件触发机制可有效地减少约42.2%数据传输.相较于固定触发阈值的静态事件触发机制,动态事件触发机制也可减少约14.8%的数据传输.残差评价函数如图3所示,该检测方法在k=62时有效检测故障.
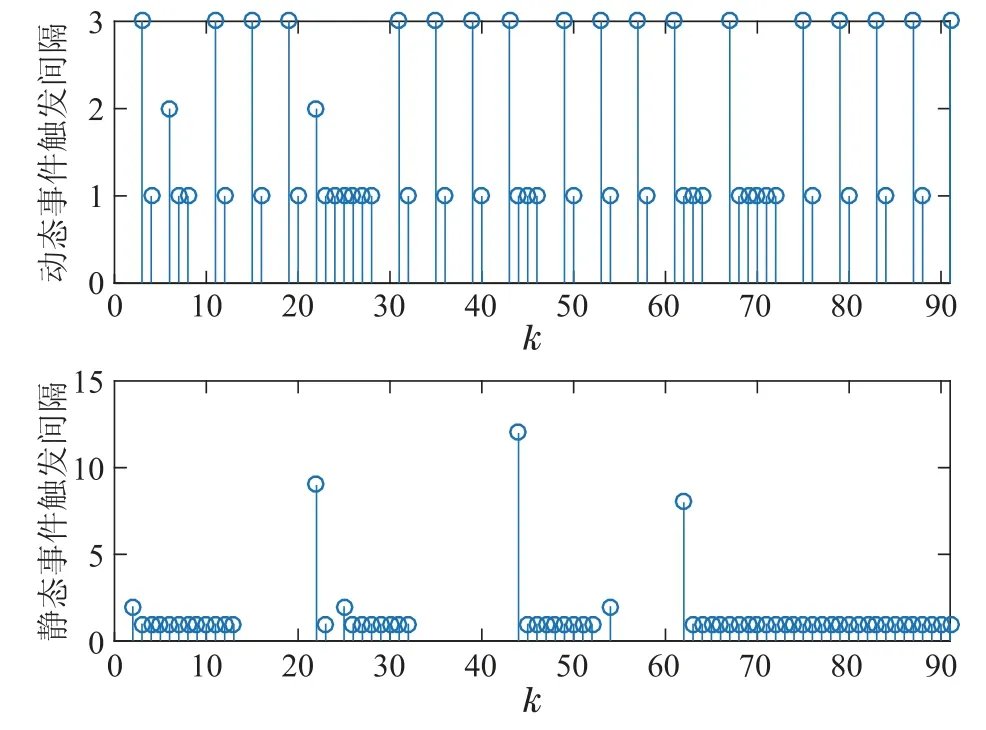
图2 故障1下动态事件与静态事件触发间隔图Fig.2 Dynamic event and static event interval of Fault 1
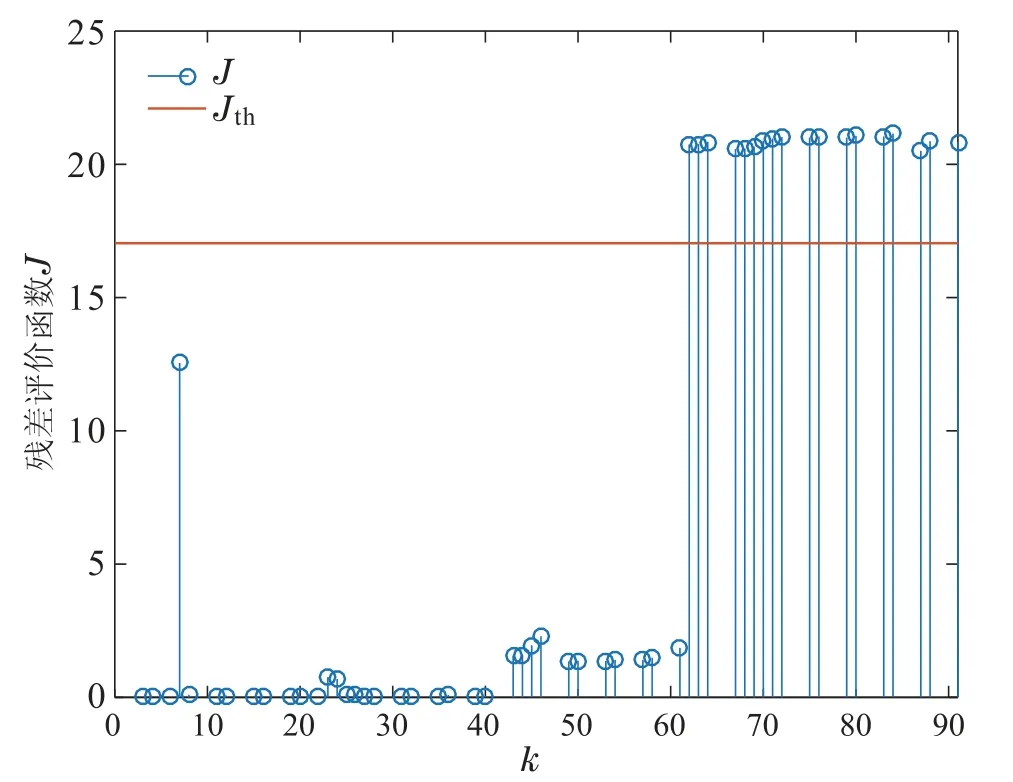
图3 故障1残差评价函数Fig.3 Residual evaluation function of Fault 1
2) 升降舵恒偏差故障(故障2).
升降舵正常工作时偏转角范围为[-25°,20°].考虑UAV升降舵在k=60时发生0.1°恒偏差加性故障情况,即式(4)中的l2(k)为

动态事件触发间隔与静态事件触发间隔如图4所示,与等周期采样比较,动态事件触发可减少约40%数据传输.与固定阈值的静态事件触发机制比较,可减少约14%数据传输.残差评价函数如图5所示,该检测方法可在k=62 时有效检测故障.

图4 故障2下动态事件与静态事件触发间隔图Fig.4 Dynamic event and static event interval of Fault 2

图5 故障2残差评价函数Fig.5 Residual evaluation function of Fault 2
3) 升降舵卡死故障(故障3).
升降舵正常工作时偏转角范围为[-25°,20°].考虑UAV升降舵在k=60时偏转角卡死在1°,该故障发生时,系统实际输入uf固定在1°.

动态事件触发间隔与静态事件触发间隔如图6所示,动态事件触发较等周期采样可减少约36.7%数据传输,较固定阈值的静态事件触发机制可减少约19%数据传输.残差评价函数如图7所示,所设计的检测方法可在k=62时有效检测故障.
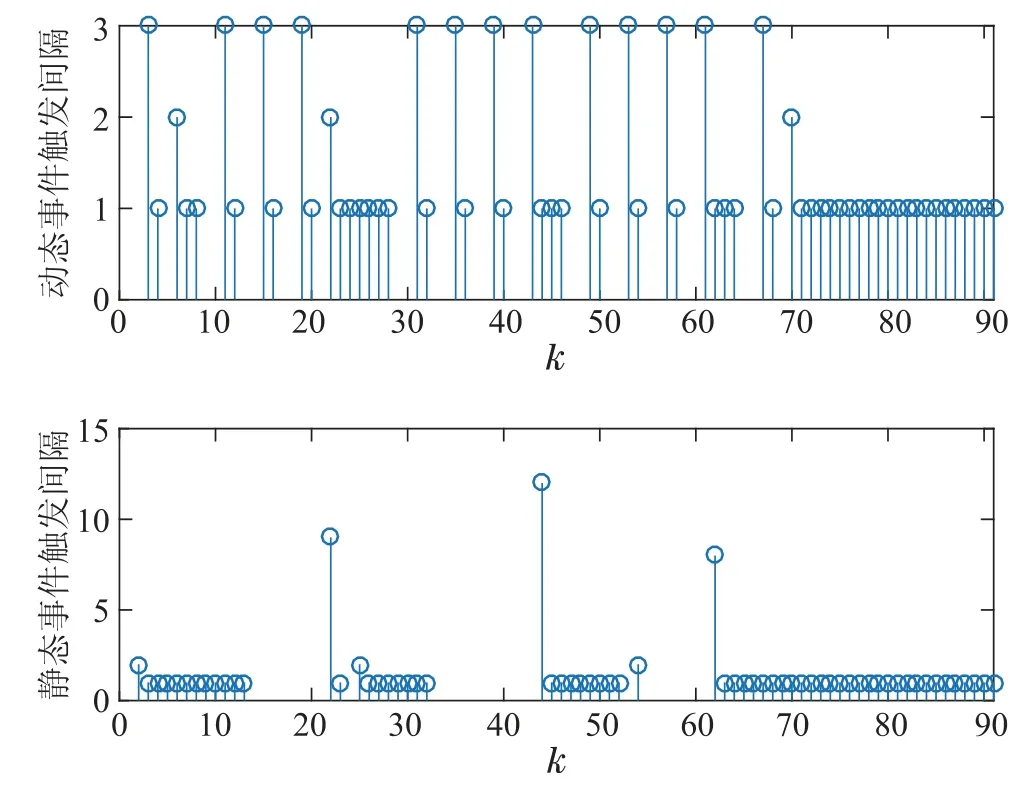
图6 故障3下动态事件与静态事件触发间隔图Fig.6 Dynamic event and static event interval of Fault 3
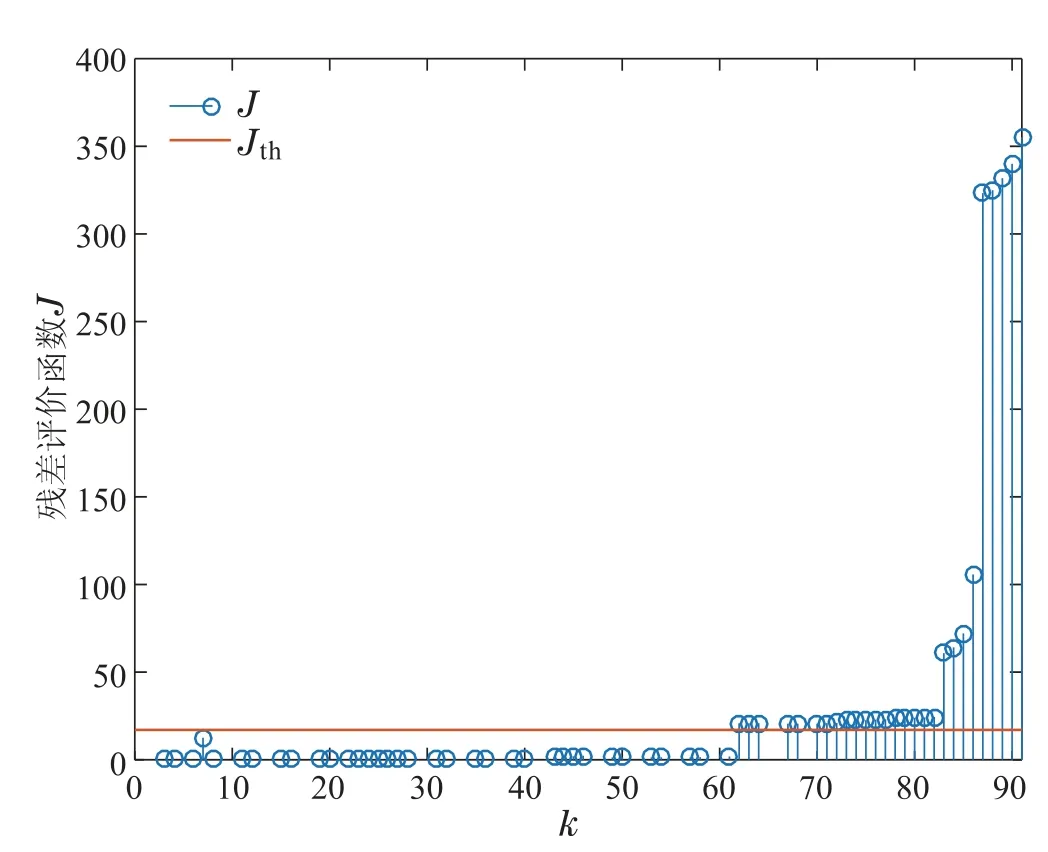
图7 故障3残差评价函数Fig.7 Residual evaluation function of Fault 3
4) 升降舵时变故障(故障4).
考虑UAV升降舵发生时变偏差的加性故障,故障角频率为0.08π,即式(4)中的l2(k)为

动态事件触发间隔与静态事件触发间隔如图8所示,动态事件触发机制较均匀等周期采样可减少约32.2%数据传输,较静态事件触发机制可减少约14%通信数据.残差评价函数如图9所示,该方法可在k=62时有效检测故障.
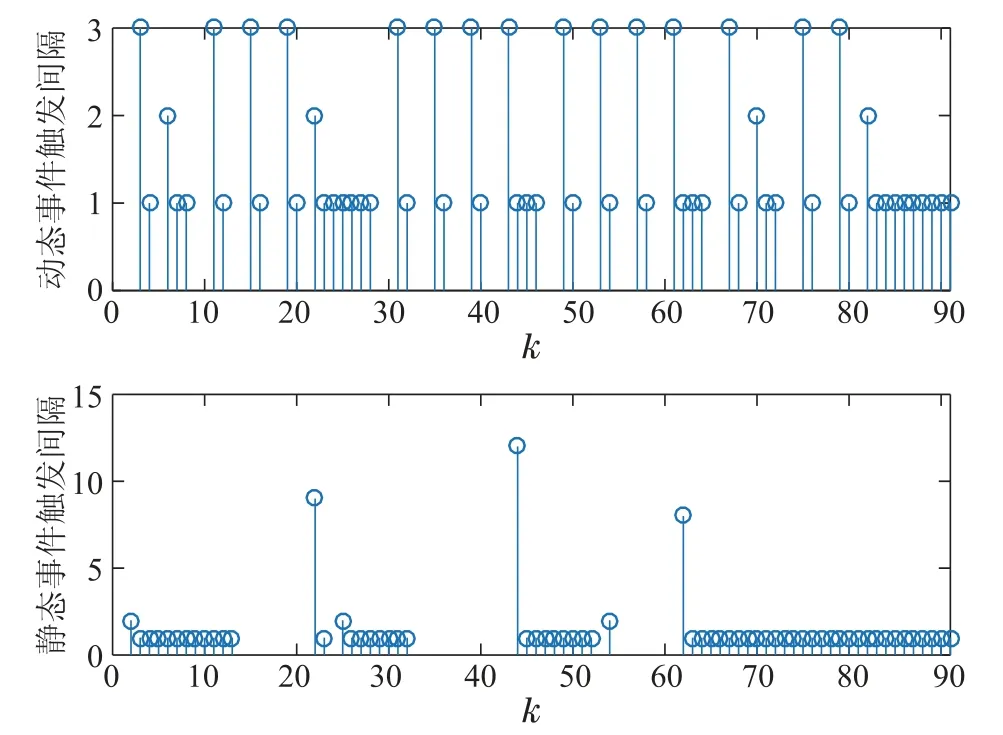
图8 故障4下动态事件与静态事件触发间隔图Fig.8 Dynamic event and static event interval of Fault 4
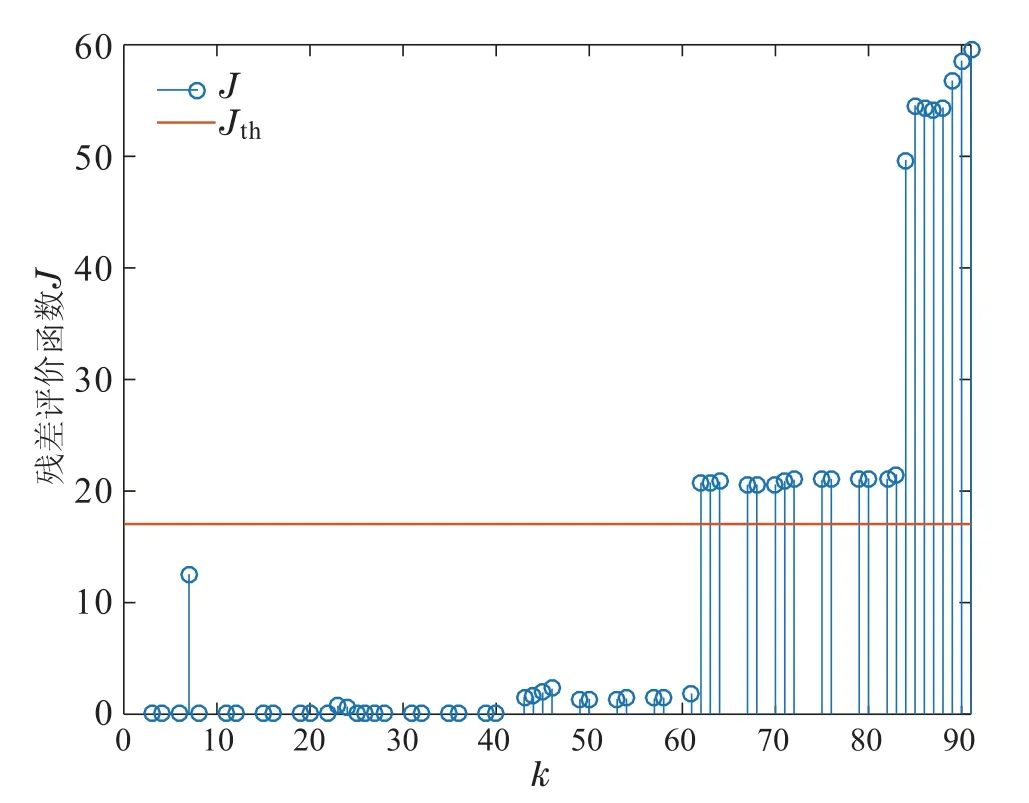
图9 故障4残差评价函数Fig.9 Residual evaluation function of Fault 4
5 结论
本文针对UAV非线性系统,研究一种基于动态事件触发的Hi/H∞优化故障检测方法.高空、长航时无人机在与地面站进行信息交互时,采用动态事件触发机制对控制输入与测量输出进行数据传输,导致故障检测滤波器设计不仅受到故障和扰动影响,还受到事件传输误差影响.针对这一类网络化控制的无人机非线性系统,本文提出一种新的动态事件触发Hi/H∞优化故障检测方法.该方法实现了故障检测滤波器残差与动态事件触发传输误差的完全解耦,并消除了Zeno现象.在Hi/H∞优化框架下,采用Riccati递归计算动态事件触发故障检测滤波器的最优解.设计合适的残差评价函数和阈值对残差进行评价.为验证所提方案的有效性,以UAV非线性姿态控制系统为例进行仿真验证.结果表明,与传统的等周期采样时间触发相比,该方法可减少30%以上的数据传输,与固定阈值的静态事件触发机制相比,可减少14%以上的数据传输,能够有效减少网络数据交互.针对无人机非线性系统典型的舵面卡死、控制效力损失和偏差故障,具有准确、快速的检测性能.
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
网络安全与数据管理(2022年3期)2022-05-23
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04