基于SVPWM的电动汽车永磁同步电机控制系统设计与实现
2022-11-07 10:51徐丹
林业机械与木工设备 2022年10期
徐 丹
(江苏联合职业技术学院常州刘国钧分院,江苏 常州 213025)
随着社会汽车保有量快速增加,同时也引起环境污染、资源消耗等诸多社会问题。发展电动汽车是解决环境污染和能源短缺问题的方案之一[1]。电动机是电动汽车行驶的直接动力源,通过电机控制系统进行电机控制实现对电动汽车的动力调整,因此电动汽车电机控制系统是影响汽车调速性能的关键因素[2-3]。现阶段电动汽车普遍以永磁同步电机(PMSM)为汽车驱动电机,常见的控制策略有矢量控制[4]、直接转矩控制[5]、无位置传感器控制[6]等,其中矢量控制作为一种动态稳定性强、响应快的控制策略,受到众多学者的青睐[7]。
本文设计了基于空间矢量控制技术(svpwm)的永磁同步电机驱动控制系统,运用Matlab工具的 Sim Powersystems模块进行控制系统的仿真,进而分析系统控制性能。以STM32芯片为核心进行硬件电路的设计,在C语言中完成程序设计。利用Simulink完成永磁同步电机控制模型的搭建,在完成系统参数整定后进行系统的调试,选择额定功率为6kW的永磁同步电机搭建实验平台进行测试,完成了实验验证。
1 SVPWM原理
空间矢量控制技术是永磁同步电机控制的一种新颖的方法,SVPWM控制技术通过跟踪电机旋转磁场的方式不断修正PWM波形实现电机控制,从本质上讲这是一种磁链跟踪控制策略,能够达到对电机及逆变器的一体化控制[8]
三相电压型逆变器结构如图1所示。VT1-VT6为六个功率开关管,由六路PWM信号进行控制,逆变器输出为ua、ub和uc。工作状态下,位于同一桥臂的两个功率开关管状态相反,即上桥臂关闭时下桥臂处于导通状态,上桥臂导通状态下下桥臂关闭。若定义SA、SB、SC分别为A相、B相、C相的工作状态,且每相对应两种状态。SA=0时表示下桥臂导通而上桥臂关闭,反之SA=1时表示上桥臂导通而下桥臂关闭,SB、SC与之类似。由此可知US对应的电压空间矢量Ui共有23=8个,分别有两个零矢量和六个非零矢量,分别为(000)、(001)、(010)、(011)、(100)、(101)、(110)、(111)。其中(000)、(111)两个矢量状态表示三相的上桥臂或者下桥臂同时导通(关闭),因此将其视为零电压矢量。其余的六个非零矢量在复平面上均匀分布,得到电压空间矢量分解及扇区分布如图2所示。

图1 三相电压型逆变器结构
由此可知,通过各个扇区两边的电压空间矢量,可以合成该扇区对应的任意空间矢量。逆变器完整的工作周期被非零电压矢量分为六个扇区,扇区对应60°的时间区间。逆变器对应的扇区仅有两个状态,即闭合状态和导通状态,通过空间矢量进行扇区的进一步划分,可以得到数量不等的时间区间,每个区间对应的时间角度为TPWM。为了得到对应的磁链增量,通过空间矢量的组合,并插入新的电压空间矢量,使得磁链尽量逼近圆形,达到对永磁同步电机变频控制的目的。
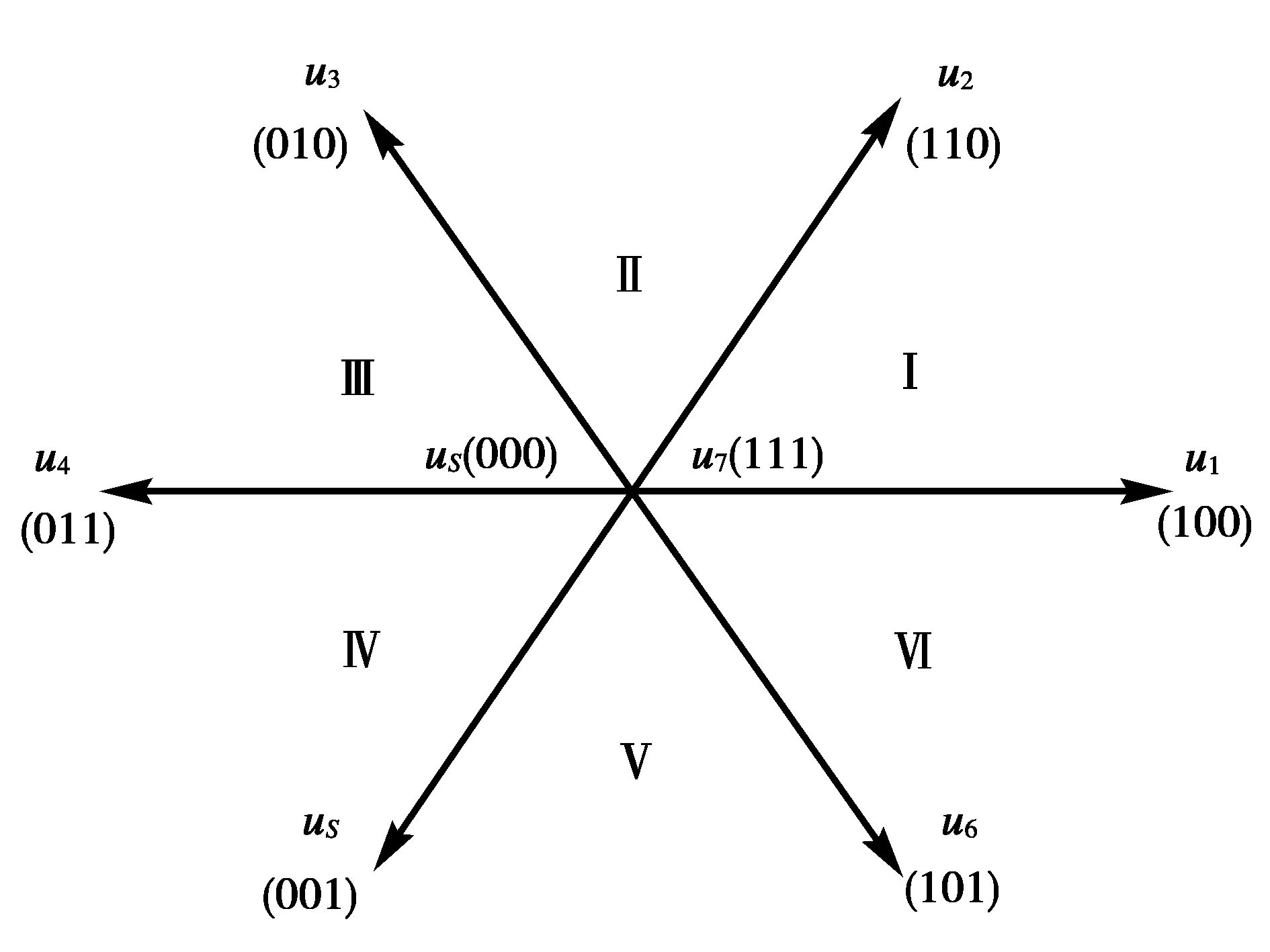
图2 电压空间矢量分解及扇区分布
2 系统设计
2.1 矢量控制系统结构
永磁同步电机控制系统结构框图如图3所示,整个系统主要包括:速度环、电流环PI调节器、坐标变换处理模块、SVPWM功能模块、位置及速度检测模块和整流逆变模块。

图3 永磁同步电机矢量控制系统结构框图
2.2 系统仿真
永磁同步电机矢量控制系统MATLAB仿真模型如图4所示,仿真波形如图5和图6所示。从仿真结果可以看到,启动阶段在预设3 kN·m的负载情况下,永磁同步电机转速随电磁转矩迅速上升,在0.01 s时即达到预设值;在0.06 s时系统的负载转矩升高至5 kN·m,对应的电机电磁转矩也可以迅速达到新的稳态,且电机转速基本保持恒定[9]。由此可见,基于空间矢量的永磁同步电机控制系统具有较快的响应能力,稳态无静差且具有较强的跟踪能力,在外部负载突变的情况下系统也能快速调整并达到新的稳态,表现出较强的系统鲁棒性,可以认为所设计永磁同步电机控制系统具有较佳的控制性能。
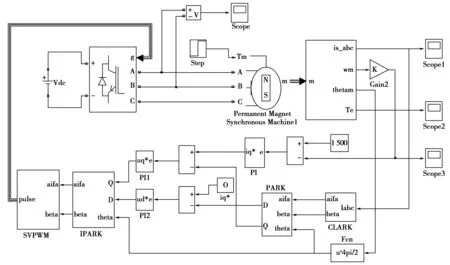
图4 PMSM矢量控制仿真模型

图5 转矩波形
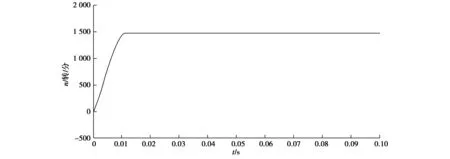
图6 转速波形
3 系统硬件设计
为验证上述仿真结果的准确性,本文搭建了PMSM驱动控制系统的硬件电路,其系统硬件结构如图7所示。系统硬件结构主要由主控芯片最小系统、电源电路、通信电路、信号检测电路等构成。
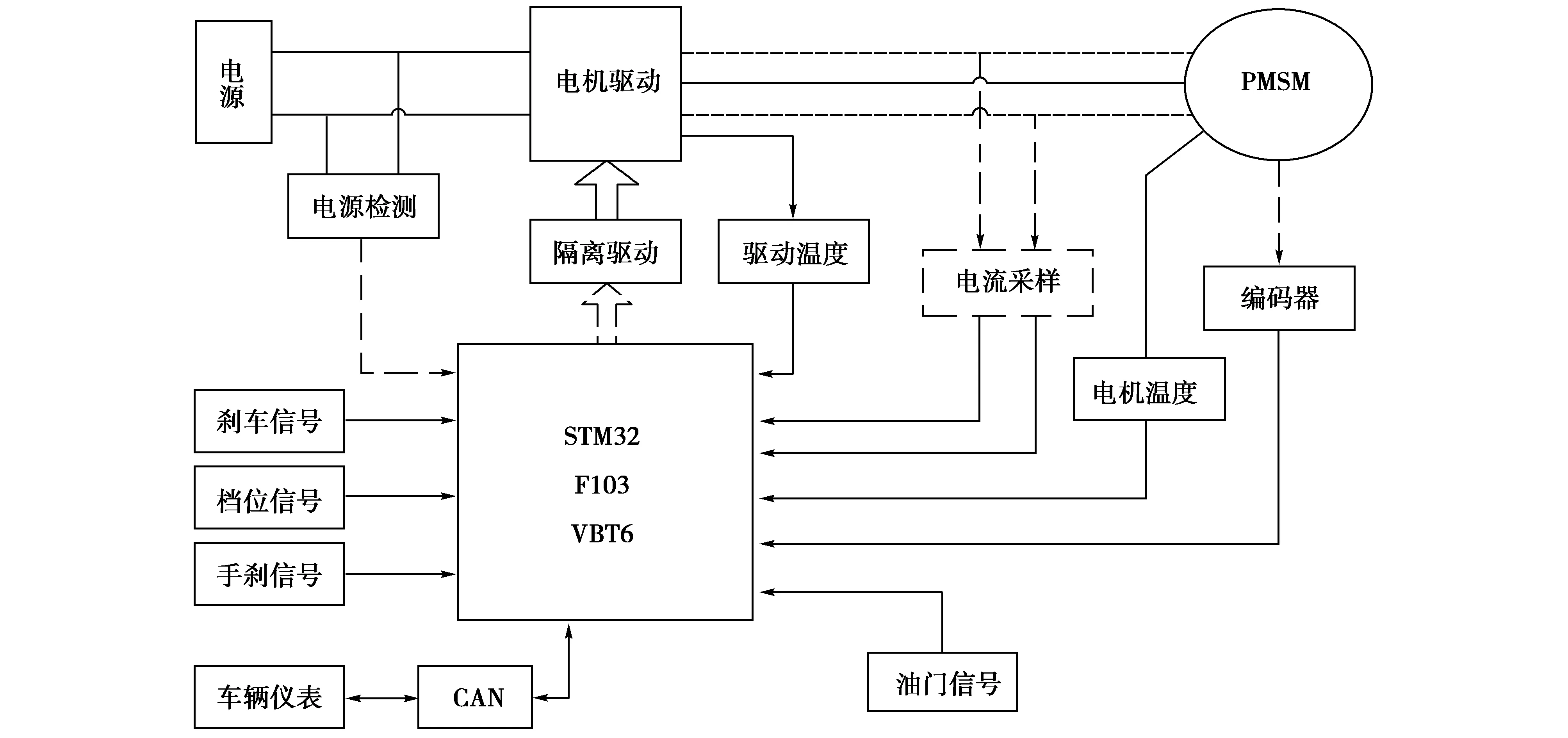
图7 系统硬件结构
永磁同步电机控制系统核心为STM32F数字芯片,并由72V蓄电池组进行供电。驱动模块则选择美国IR公司提供的IR2010S 驱动器,以及美国MAX POWER公司生产的MXP8835功率开关管进行设计。PMSM采用三相方式进行连接,在工作过程中控制系统对其中两相电流进行检测,再通过计算得出另一相的电流值。相电流检测基于霍尔传感器SS495A进行测定,并设计滤波电路进行信号的预处理,利用主控芯片的模数转换功能直接得到相电流值。由编码器进行PMSM的转速信号测定,并送入数字芯片进行处理。数字控制芯片输出六路PWM信号进行功率开关管的开关控制,实现PMSM的空间矢量控制功能。此外,通过CAN总线模块进行汽车ECU与STM32F数字芯片的通信,将数字芯片的各种数据传入汽车仪表中显示出来,便于驾驶人员观察汽车行驶状态。
4 系统软件设计
4.1 系统软件主程序
永磁同步电机控制系统软件主要由初始化、中断、数据采集等子程序构成,其中初始化模块主要进行系统的初始化,并进行变量的赋值。根据SVPWM生成的系统需求,还需要进行转速、电流以及电机转子位置的测定[10]。软件主程序框图如图8所示。

图8 系统软件主程序框图
4.2 数据采集子程序
4.2.1 电流信号采集
由于脉冲电流信号的存在,会影响电流检测精度。本程序中采用边界限定法、均值滤波法进行脉冲信号的剔除,确保检测电流的精度[11]。电流信号采集及电流检测程序流程图如图9所示。
4.2.2 转速检测
在电机上安装编码器进行转速参数的检测,信号通过光耦隔离后再利用STM32的计数器进行信号的接收,通过程序计算计数器中的数据,即可确定编码器中的脉冲数量[12]。可基于下式进行电机转速的计算:
(1)
式中:n为永磁同步电机转速,N为采样时长T内检测到的脉冲数量,T为采样周期时长,k为编码器每转动一周所产生的脉冲数量。本次设计基于Omron公司的线编码器,旋转一周所产生的脉冲数为500。

图9 电流检测程序流程图
4.3 PWM中断程序设计
PWM信号由STM32芯片的定时计数器1产生,其中断时间为50 μs。产生中断后,首先进行现场保护,通过主控芯片进行电机相电流的读取,然后进行相电压的计算,并调用坐标系变换模块得到两相旋转坐标系下的电压值,再读取电机转速数据并计算d轴超前电角度,由此计算出所需要的SVPWM波形。PWM中断程序的流程图如图10所示。
软件在未输入新的电压矢量角之前,按照当前电压矢量角所处区间确定有效矢量及对应的作用时间,并由定时计数器2输出PWM波。SVPWM子程序流程图如图 11所示。
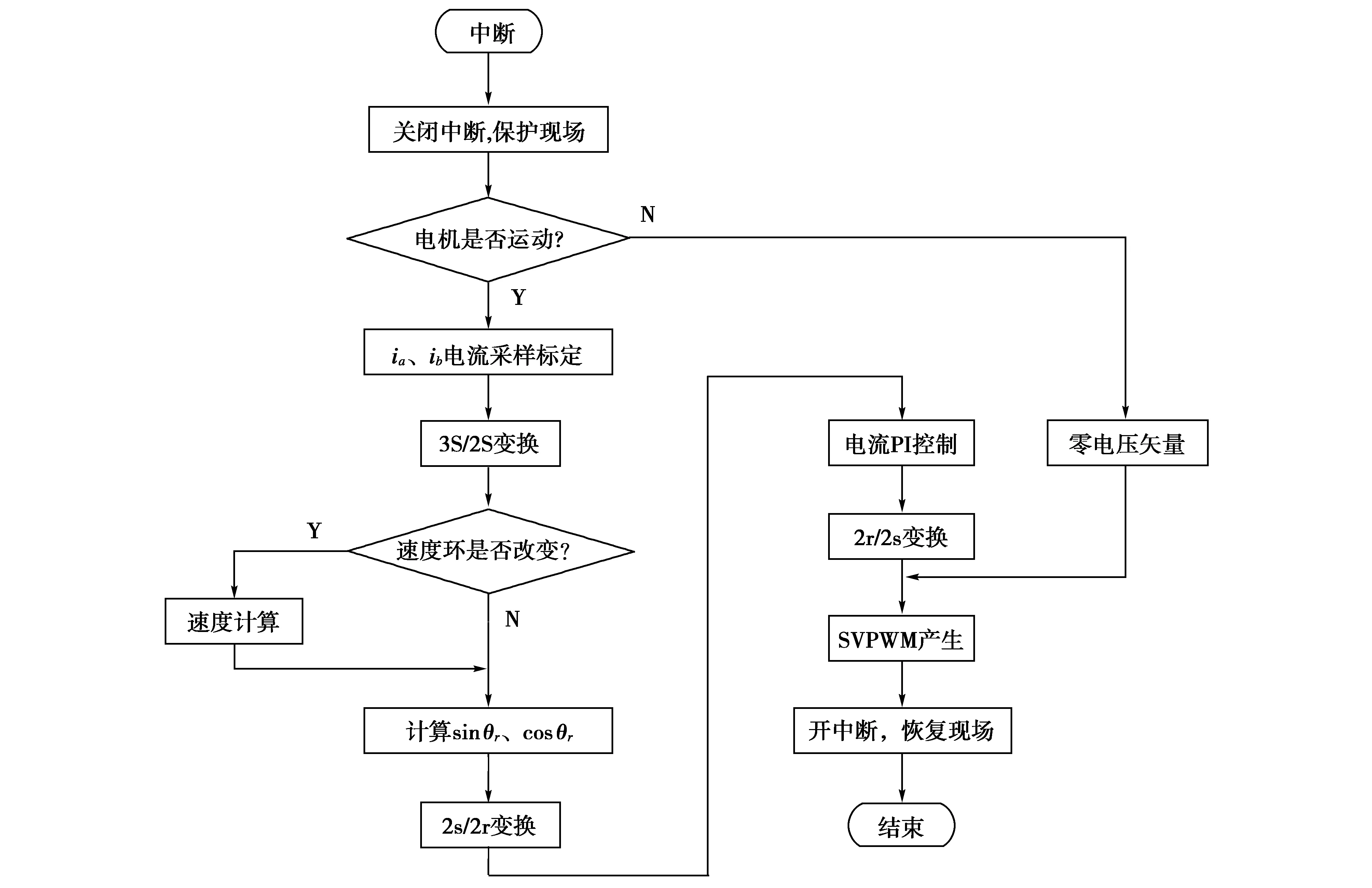
图10 PWM中断服务程序流程图
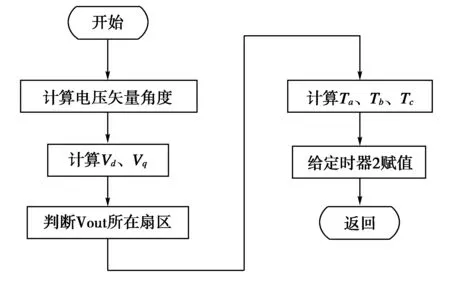
图11 SVPWM子程序流程图
5 实验结果与分析
5.1 实验平台搭建
本设计选用额定功率为6 kW的永磁同步电机,极对数为4,电机具体参数如下:驱动电压,72 V;转子磁链,0.182 6 Wb;定子电感Ld=0.526 mH,Lq=1.2 mH;定子电阻0.957 Ω。电机实物如图12所示。

图12 PMSM实物
完成硬件电路的设计后,将其发送给PCB厂家进行制作,并将所选电子元器件焊接在PCB板上,并对硬件电路进行测试,确保各功能模块的功能正常实现。永磁同步电机驱动控制系统可分为驱动电路、控制电路两部分,对应的控制电路实物图如图13所示。
最后基于控制电路及永磁同步电机进行实验平台的搭建,实验平台结构框图、实物分别如图14、图15所示。
图13 控制电路实物

图14 永磁同步电机实验平台结构框图

图15 PMSM驱动控制系统实验平台
5.2 实验结果及其分析
驱动控制系统要求硬件电路在不同转速下均能够输出足够的转矩,因此需要进行不同转速条件下的转矩输出实验。本次设计利用Matlab软件进行转矩波形的图形输出,并利用霍尔电流传感器进行电流检测,并利用示波器显示相电流波形。电机的转速分别设置为500、1 000、3 000 r/min,施加负载30/50/90/160 N·m。500 r/min对应的转矩输出及相电流检测图形如图16所示。
从图16的实验结果可以看到,在500 r/min条件下分别施加30/50/90/160 N·m的转矩,对应的相电流分别为60 A、90 A、150 A、260 A,转矩上下波动范围为±1.2 N·m,具有良好的转矩和电流跟随性。


图16 500 r/min条件下不同转矩对应的相电流
在电机转速为1 000 r/min条件下分别施加30/50/90/160 N·m的转矩,进行对应的相电流检测,得到下图17所示结果。
1 000 r/min条件下,分别施加30/50/90/160 N·m的转矩,对应的相电流分别为63 A、92 A、160 A、280 A,转矩上下波动范围为±0.95 N·m,具有良好的转矩和电流跟随性。

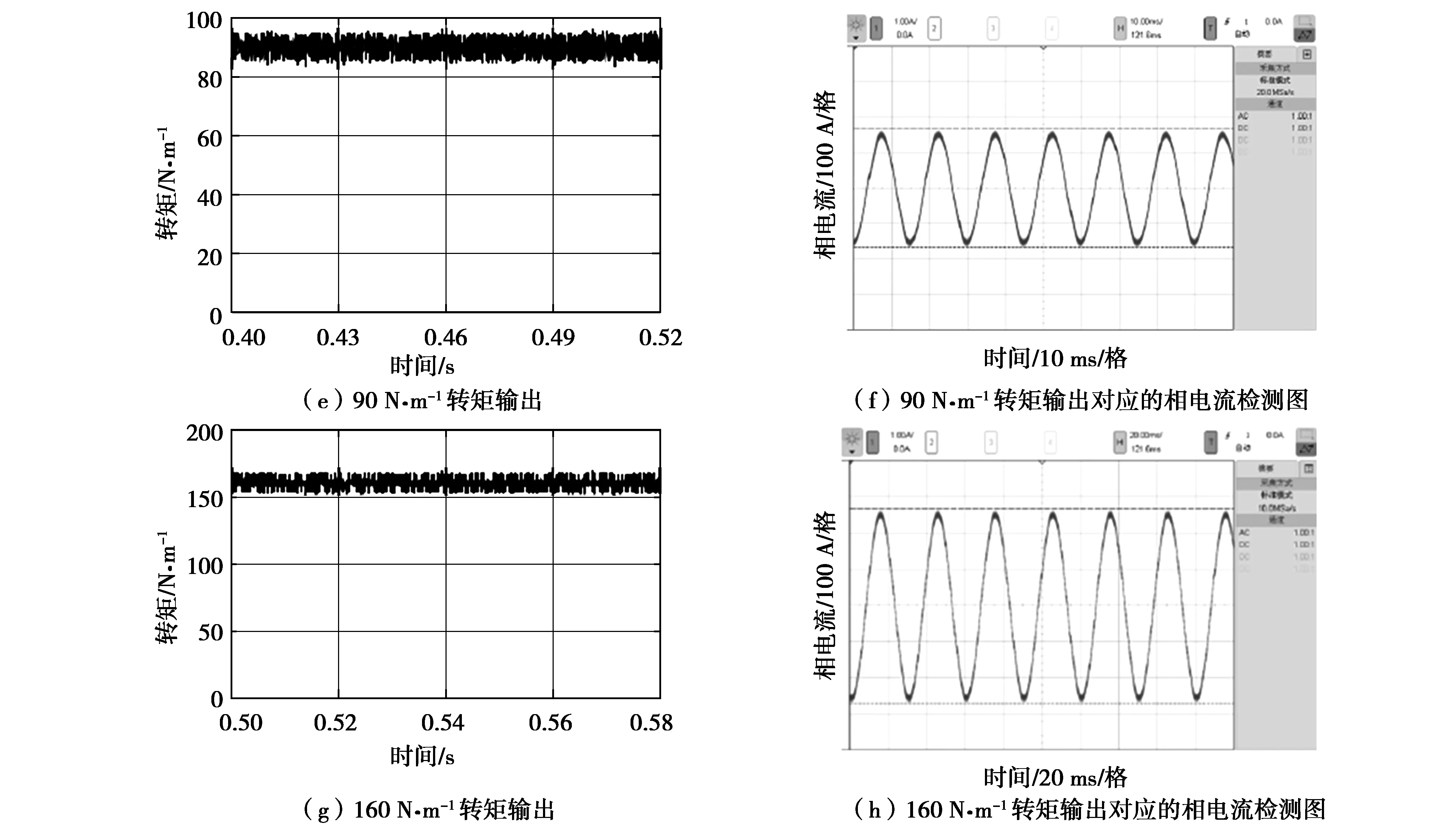
图17 1 000 r/min条件下不同转矩对应的相电流
在电机转速为3 000 r/min条件下分别施加30/50/90/160 N·m的转矩,进行对应的相电流检测,得到下图18所示结果。
3 000 r/min条件下,分别施加30/50/90/160 N·m的转矩,对应的相电流分别为65 A、100 A、163 A、270 A,转矩上下波动范围为±0.82 N·m,具有良好的转矩和电流跟随性。


图18 3 000 r/min条件下不同转矩对应的相电流
结合以上实验结果可知:电机在不同转速下均能够稳定输出较大转矩,同时在3 000 r/min的速度范围内,转矩和电流动态性能良好,表明电机驱动控制系统能够达到既定的驱动控制效果。
电动汽车控制系统要求电机具有快速响应能力,同时要求电机能够保持输出转矩的稳定性。本次设计利用串口通信将电机转速参数传输至上位机,对电动机的转速进行检测,测定1 000 r/min转速条件下永磁同步电机的响应曲线。永磁同步电机转速实测曲线、预估曲线如图19所示。

图19 电机转速响应波形(1 000 r/min)
从图中的转速响应曲线看,所设计控制系统对应的永磁同步电机能够快速达到预设转速,同时曲线超调量小,达到预设转速后保持稳定运行状态,可认为所设计系统的调速性能较好。
进一步对控制系统的转速变化后稳定性进行测试,在0.2s时将电机转速由1 000 r/min调节为1 500 r/min进行电机实际转速的测试,电机转速实测曲线、估计曲线如图20转速变化后电机转速响应波形图所示。

图20 转速变化后电机转速响应波形图
从图20可以看到,在转速由1 000 r/min变化为1 500 r/min时,预期的转速值与实测转速值存在一定偏差,但转速误差控制在5 r/min范围内,误差率在0.33%左右,即所设计的控制系统能够在转速变化的情况下将转速波动控制在较小区间内,表现出较强的鲁棒性。
6 结束语
本文基于空间矢量技术完成永磁同步电机控制系统的软、硬件设计,实现了既定的控制系统功能。对所设计系统搭建实物系统,验证控制系统各项功能并测试控制效果。从实验效果看,所设计电机控制系统与仿真结果一致,具有较低的超调量,同时响应迅速、转矩脉动较低,具有较好的抗扰动能力及动态性能,满足电动汽车电机的控制需求,适用于汽车电机控制领域。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
防爆电机(2022年4期)2022-08-17
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
防爆电机(2022年3期)2022-06-17
南北桥(2022年2期)2022-05-31
微电机(2022年1期)2022-03-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
科学技术创新(2021年10期)2021-04-26
航空学报(2018年12期)2019-01-18