
计及二次调频独立型微电网快速调频策略
2022-11-03 03:27:36严伟徐光福侯炜朱皓斌陈俊王政王晨
电力电容器与无功补偿 2022年5期
严伟,徐光福,侯炜,朱皓斌,陈俊,王政,王晨
(1.南京南瑞继保电气有限公司,南京 211106;2.东南大学电气工程学院,南京 210096)
0 引言
独立型微电网不依赖于外部大电网,具有可再生能源就地发电、就地消纳的优点,可以有效解决高、海、边、无等地区供电问题。然而独立型微电网缺少大电网提供的频率、电压支撑,加之系统惯性弱、功率波动性强、负荷与电源的双重波动加剧了微电网调频的压力,频率稳定控制更加困难。微电网频率稳定按照遭遇扰动的程度一般可分为小扰动和大扰动[1]。微电网系统发生大扰动后,出现较大的有功功率不平衡,系统频率能够保持或恢复到允许范围内的能力称为暂态频率稳定[2-4]。
微电网控制模式分为对等控制、主从控制和分层控制。对等控制有利于分布式电源(distributed generation,DG)即插即用,每个DG 根据接入点电压和频率的就地信息进行下垂控制,共同支撑系统的频率电压稳定,但是由于多DG 下垂并联控制策略存在功率分配不均、环流、振荡等问题[5-6],应用还十分困难,因此目前工程上一般应用主从控制或分层控制模式。独立型微电网主从控制或分层控制一般采用一个(或少量几个)DG 或储能作为主控电源(以下简称“主电源”)承担微电网调频调压角色,遭遇大扰动时,可能存在调频容量不足进而引起系统频率失稳的问题,研究独立型微电网暂态频率稳定控制具有重要意义。
文献[7]提出将分布式电源采用改进型下垂控制,并将这些下垂微电源整体作为主控部分,其余的微电源采用恒功率控制(简称PQ 控制)作为从控部分,较传统的主从控制具有更好的适应性和稳定性。文献[8]提出了一种新型自适应下垂控制方案,针对低压微电网抗干扰能力差,引入频率、电压补偿环节在自适应下垂控制中来提高系统鲁棒性。文献[9]提出了一种提高系统频率稳定性的虚拟同步发电机(VSG)控制策略,利用VSG 可模拟同步发电机转动惯量与阻尼的能力及其快速的动态响应特性,实现对系统频率波动的抑制。文献[10]提出一种两层控制结构,初级控制由传统的功率-频率下垂改进为功率-增量因子下垂,第2 层控制采用一致性协议以分布式方式实现频率同步、频率无差、功率优化目标。文献[11]针对低压微电网提出了一种自适应调节下垂系数的改进下垂控制方法,实现了微源功率解耦和频率电压无静差控制,改善了低压微电网的频率及电压水平。上述文献主要集中在对主电源变流器控制和基于分层的一次、二次调频控制研究,对于提高小扰动情况下频率稳定控制和频率无差控制性能具有积极的作用,但是难以解决大扰动时主电源调频容量不足引起的暂态频率稳定问题。
出现大扰动导致微电网内功率严重不平衡时,常见的控制手段是采取低频减载和高频切机紧急措施[12-13],却忽略了微电网内PQ 源的快速调节能力[14-15],导致过多的负荷或电源被切除,此外关于低频减载和高频切机的频率整定均未考虑独立型微电网频率运行区间受二次调频的影响。
本文针对大扰动下的暂态频率控制问题,分析独立型微电网运行频率特征,基于对微电网内PQ源快速调节潜力的挖掘,并考虑二次调频影响,提出一种快速调频策略并研制了微网协调控制器(microgrid coordinated controller,MGCC),最后通过RTDS 硬件在环试验验证所提策略的有效性。
1 独立型微电网大扰动下控制及频率特征分析
由于电力电子系统的非线性和复杂性,微电网本质上是一个典型的非线性动态系统,基于线性化的数学模型只能描述一定控制方式下的小干扰稳定性问题[16-17],对于本文所讨论的大干扰暂态稳定性问题并不适用,目前针对微电网大扰动下的暂态过程研究尚十分有限[1],定量分析极其困难,本节主要通过原理和仿真进行定性分析,得出一般结论。
本文以图1 所示光储典型独立型微电网系统结构为研究对象,储能1 作为主电源采用VF 下垂控制;储能2、光伏1、光伏2 采用PQ 控制。
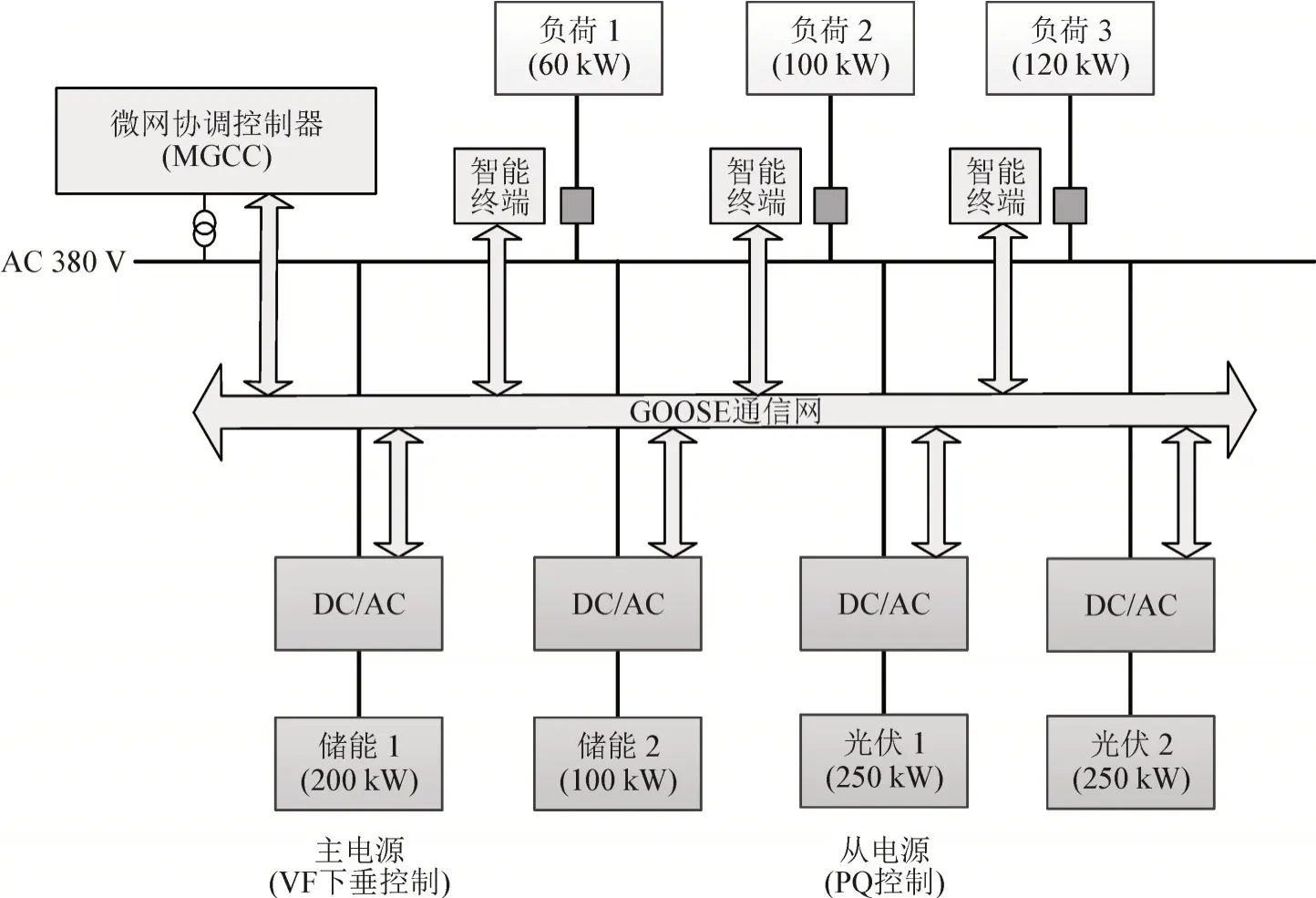
图1 典型独立型微电网系统结构Fig.1 Structure of typical independent micro grid system
1.1 主电源一/二次调频特性分析
采用VF 下垂控制的主电源为独立型微电网提供频率参考值,当发生功率扰动时,主电源通过P-f下垂控制调节有功输出维持系统内功率平衡,此过程为一次调频,其中P-f曲线见图2,P、f关系为
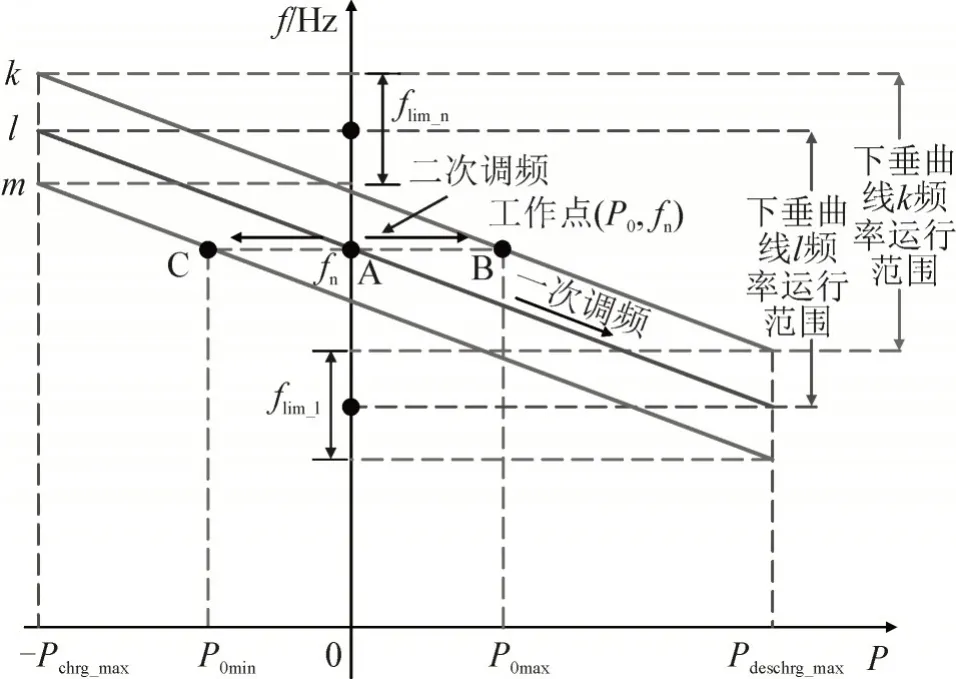
图2 主电源调频曲线Fig.2 Frequency modulation curve of main power source

式中:Kp为有功-频率下垂系数;P0为额定频率fn下对应的参考有功功率(以下称“参考功率”)。
假设储能最大允许放电功率为Pdischrg_max、最大允许充电功率为Pchrg_max,代入式(1)得到频率运行下限flim_l、上限flim_h分别为
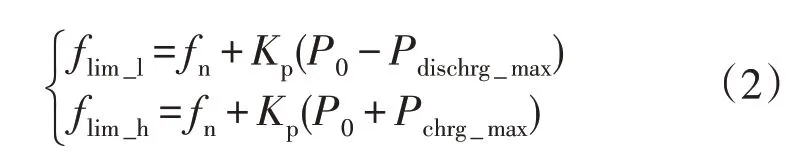
式(2)表明独立型微电网在主电源一次调频控制下,频率理论运行在[flim_l,flim_h]区间内。
一次调频属于频率有差调节,在运行过程中为了减小频率偏差,需要再采用二次调频[18-21],即通过改变参考功率P0值,使得下垂曲线整体平移,进而调节系统频率更接近额定频率fn。而当二次调频参考功率点由图2 中A 点移向B 点(或C 点),频率[flim_l,flim_h]区间发生偏移,会造成低频减载或高频切机频率定值难以兼顾,进而引起拒动、误动。
1.2 大扰动下控制及频率特征仿真
为了进一步研究大扰动下控制行为及频率特征,采用Matlab/Simulink 对图1 建模,进行负荷突增仿真分析。假设储能1 具备500 ms 短时1.1 倍过载能力,超时过流保护跳闸,Kp=0.25×10-2Hz/kW,Pdischrg_max、Pchrg_max均为200 kW,P0=0。根据式(2),微电网频率理论上运行在[49.5 Hz,50.5 Hz]内。
初始状态光伏1、2 发电功率均为50 kW、储能2 功率为-40 kW(充电)、120 kW 负荷3 投入运行。
微电网频率与储能1 有功输出曲线见图3。1)0.5 s前储能1 放电功率约60 kW,系统频率运行在49.84 Hz。2)0.5 s 时,投入100 kW 负荷2,储能1 通过增加输出电流从而提高输出有功至160 kW,系统达到新的平衡,受下垂控制作用,频率下降并稳定在49.6 Hz。3)1.0 s 时,投入60 kW 负荷1,储能1 仍然迅速通过增加输出电流从而提高有功输出,电流到达1.1 倍额定后变流器电流控制环进入饱和限流状态[22],输出功率达到200 kW,频率运行于49.5 Hz,持续500 ms 后,主电源储能1 过流跳闸,失去主电源,全系统失电。
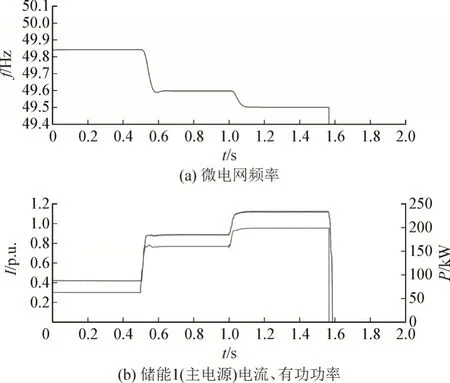
图3 频率与主电源功率仿真波形Fig.3 Simulation waveform of frequency and power of main power source
仿真发现,微电网遭遇功率大扰动时,基于下垂特性的主电源在几十毫秒内首先完成一次调频,如果功率扰动值小于主电源最大可调节功率,则微电网进入一个新的稳态,系统频率值由下垂曲线决定;反之,如果功率扰动值大于主电源最大可调节功率,主电源一次调频后电流控制环将进入饱和限流状态,输出功率达到或超过最大允许充/放电值,频率运行在[flim_l,flim_h]边界,接下来主电源可能出现过流保护跳闸,也可能与其他电源之间失去稳定[22-23]。
2 计及二次调频独立型微电网快速频率控制策略
2.1 独立型微电网快速调频策略
前文分析了当微电网频率运行在理论区间边界时,主电源可能已经进入饱和限流状态或输出功率接近最大允许充/放电值,处于非安全稳定状态。而独立型微电网遭遇大的功率扰动时,仅靠主电源紧急调频,可能会出现因容量不足引起系统崩溃的问题,此外,二次调频引起频率正常运行区间偏移,传统低频减载或高频切机频率定值整定难以兼顾,引起拒动、误动。针对上述问题,本文提出的快速调频策略主要思想是实时计算理论频率运行区间,监测到当前微电网频率运行在理论区间边界时,优先快速调节包含储能和光伏在内的PQ 源有功代替传统切机切负荷,辅助主电源进行紧急调频,避免因主电源调频容量不足引起的系统崩溃。
快速调频策略逻辑见图4,为了确保频率运行在[flim_l,flim_h]区间内并留有安全裕量,首先MGCC 根据当前P0值和下垂系数、最大允许充/放电功率,采用式(4)实时计算快速调频动作门槛下限值fsafe1_l和快速调频动作门槛上限值fsafe1_h。
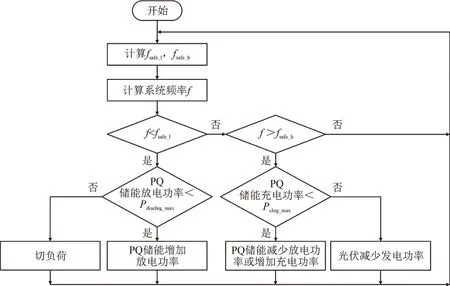
图4 独立型微电网快速频率控制逻辑图Fig.4 Logic diagram of fast frequency control for independent microgrid
式中,Δfsafe1和Δfsafe2为频率安全裕量。
式(2)代入式(3),得到公式为

测量系统频率f,若f∈[fsafe_l,fsafe_h],则不执行调频操作;若f∉[fsafe_l,fsafe_h],MGCC 则立即调节PQ 储能或光伏有功,具体过程:1)若f>fsafe_h,采用PI 算法控制PQ 储能逐步减少放电功率或增加充电功率,直到f≤fsafe_h。如果PQ 储能功率到达充电功率上限,仍然f>fsafe_h,则采用PI 算法逐步减小光伏发电功率,直到f≤fsafe_h。2)若f<fsafe_l,控制PQ 储能逐步增加放电功率或减小充电功率,直到f≥fsafe_l。如果PQ 储能功率到达放电功率上限,则进行轮次切负荷控制,直到f≥fsafe_l。
2.2 PQ源功率控制响应速度测试
对PQ 源实施毫秒级控制是实现快速调频的关键,在UAPC(unified advanced platform for protection and control)平台研制的MGCC 上开发了本文提出的策略。如图1 所示,采用GOOSE 协议与PQ 储能变流器、光伏逆变器通信,通信延时<2 ms[24]。
采用MGCC 分别对实际工程中500 kW 储能(1台500 kW 储能变流器,采用PQ 控制)和1.5 MWp 光伏(3 台500 kW 光伏逆变器)进行功率控制响应速度测试。图5(a)为MGCC 控制储能由额定放电功率阶跃至额定充电功率时响应曲线,自MGCC 发送功率指令(t=0.2 s 时)至储能实际功率输出响应时间约15 ms;图5(b)为MGCC 控制光伏输出功率由800 kW 阶跃至100 kW 时响应曲线,响应时间约55 ms。可见采用MGCC 控制PQ 储能和光伏均能在百毫秒内完成功率目标值的调节,快于主电源电流饱和后保护动作时间,满足频率暂态稳定控制响应要求。
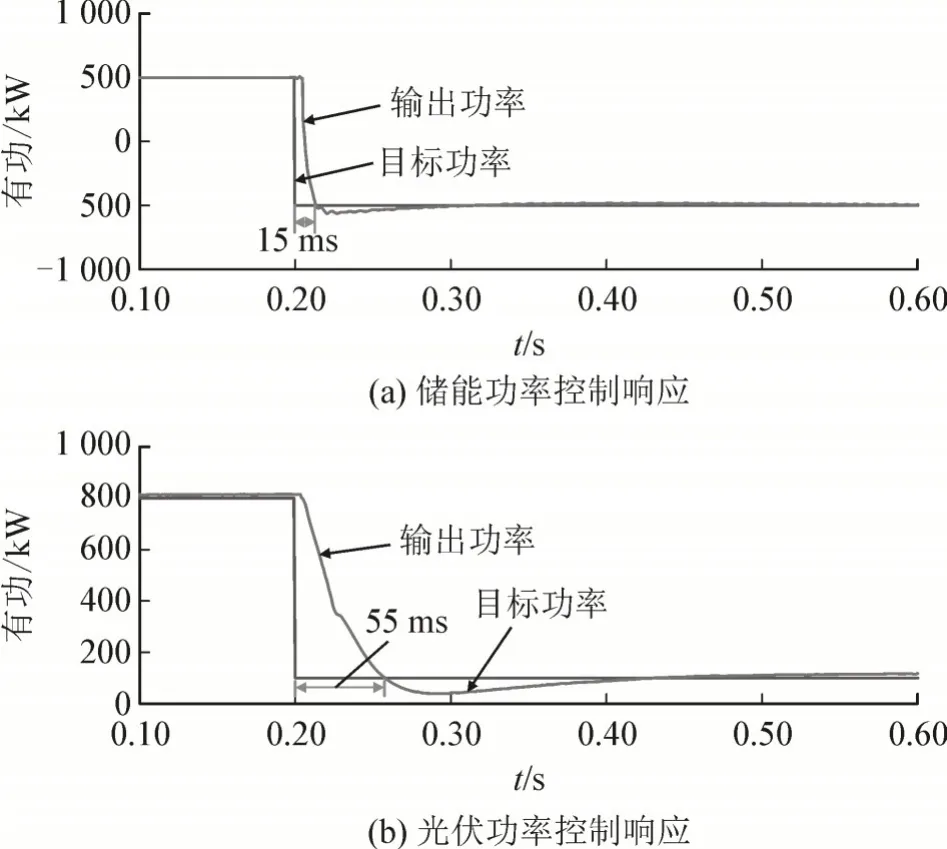
图5 PQ源功率响应曲线Fig.5 Power response curve of PQ source
3 硬件在环试验验证
图6 为微电网RTDS 硬件在环试验平台,采用图6 硬件在环试验方案搭建了由实时数字仿真器(RTDS)与储能变流器控制器、光伏逆变器控制器、MGCC 组成的微电网试验平台,系统一次结构及光伏、储能、负荷额定容量如图1 所示。主电源储能1具备500 ms 短时1.1 倍过载能力,下垂系数Kp=0.5×10-2Hz/kW,Pdischrg_max、Pchrg_max均为200 kW,频率安全裕量Δfsafe1=0.2 Hz,Δfsafe2=0.2 Hz。
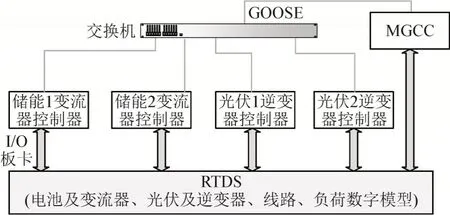
图6 微电网RTDS硬件在环试验平台Fig.6 In-loop test platform of RTDS hardware of micro grid
试验分为3 个场景,验证降功率调频、升功率调频和二次调频影响下的动作行为,其中场景1 和场景2 二次调频参考功率P0=0,场景3P0=60 kW。
为了与传统低频减载作对比,设定传统低频减载定值为49.2 Hz,延时0.3 s 跳负荷1,延时0.6 s 跳负荷2;快速调频策略中低频调频门槛值为fsafe_l,延时0.3 s 跳负荷1,延时0.6 s 跳负荷2。根据式(4),得到场景1 和场景2fsafe_l=49.2 Hz,fsafe_h=50.8 Hz,场景3fsafe_l=49.5 Hz,fsafe_h=50.1 Hz。
3.1 场景1:验证PQ储能+光伏降功率快速调频策略
图7 为负荷突减导致有功严重过剩,快速调频策略试验波形图。
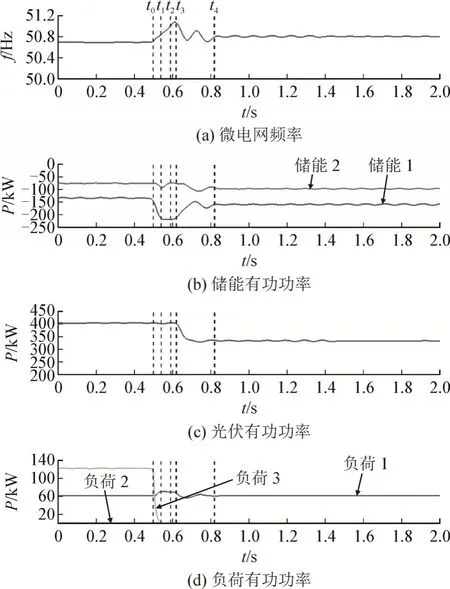
图7 PQ源降功率快速调频试验波形Fig.7 Test waveform of fast frequency modulation of PQ power reduction
0.5 s 前为扰动前初始态,光伏发电1、2 发电功率共计400 kW,负荷1、3 投入,共180 kW,储能2 以80 kW 恒功率充电,储能1 充电功率约为140 kW,频率稳定运行在50.7 Hz。
1)t0=0.5 s 时刻遭遇120 kW 负荷3 线路跳闸,系统功率严重过剩,储能1 迅速增加充电功率试图维持系统功率平衡,t1时刻到达最大值220 kW,变流器电流控制环进入饱和限流状态,频率快速上升至约51.1 Hz,大于安全稳定区高频边界50.8 Hz。2)t2、t3时刻先后触发储能2 和光伏快速调频逻辑,储能2 首先迅速增加充电功率至最大值,接着光伏通过PI 控制算法减小输出功率,储能1 开始逐步退出饱和。3)t4时刻储能1 运行在放电功率160 kW,光伏输出功率330 kW,系统频率精准控制在50.8 Hz,进入新的稳定状态,避免了主电源储能1 长时间处于饱和限流状态引起的系统崩溃,验证了功率严重过剩时快速调频策略的有效性。
3.2 场景2:验证PQ 储能升功率+切负荷快速调频策略
图8 为大电源跳闸导致系统有功严重不足,采用本文快速调频策略与传统低频减载的试验波形。两者在0.5 s 前初始态相同,光伏1 投入,发电功率200 kW,负荷1、2、3 均投入,共280 kW,储能2 以20 kW 恒功率放电,储能1 放电功率约60 kW,微电网频率运行在49.7 Hz。
首先分析采用本文快速调频策略试验波形,如图8 中实线所示。1)t0=0.5 s 时刻光伏1 跳闸,为了维持系统功率平衡,储能1 快速增加放电功率,t1时刻到达220 kW,频率跌至49.25 Hz,并继续下滑。2)t2时刻频率下降为49.05 Hz,MGCC 调节储能2增加放电功率试图控制频率至安全稳定区低频边界49.2 Hz 以上,但t3时刻储能2 放电功率到达最大允许放电功率100 kW,频率仍低于49.2 Hz。3)t4时刻低频1 轮动作跳开负荷1,储能1 放电功率下降至120 kW,频率逐步回升至49.4 Hz,进入新的稳定运行状态。
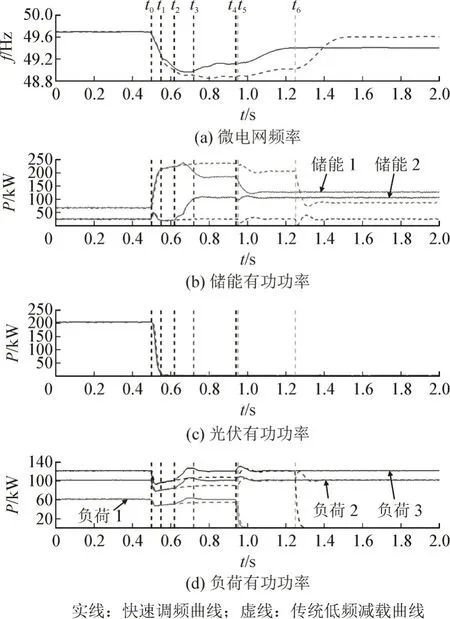
图8 两种调频策略试验波形比较Fig.8 Comparison of test waveform of two frequency modulation strategies
采用传统低频减载策略试验波形,如图8 中虚线所示。1)t0时刻光伏1 跳闸,同样,储能1 快速增加放电功率,t1时刻到达220 kW,频率跌至49.25 Hz,并继续下滑。2)t5时刻低频1 轮动作跳开负荷1,储能1 放电功率下降至203 kW,随后频率回升至48.88 Hz,仍低于低频动作值49.2 Hz。3)t6时刻低频2 轮动作跳开负荷2,储能1 放电功率下降至84 kW,频率逐步回升至49.6 Hz,进入新的稳定运行状态。
可以看出,当微电网出现严重有功不足超出主电源调节能力时,采用快速调频策略与传统低频减载均可使得系统重新恢复稳定,但快速调频策略优先控制PQ 储能释放有功参与紧急调频,一方面少切负荷或不切负荷,显著缩小了停电范围,另一方面使得系统频率更快恢复至安全稳定区,提高了供电质量。
3.3 场景3:计及二次调频,验证PQ储能+光伏降功率快速调频策略
图9 为大电源跳闸导致系统有功严重不足,计及二次调频作用,采用本文快速调频策略与传统低频减载的试验波形。二次调频给定P0=60 kW,由于二次调频作用,0.5 s 前微电网频率运行在50 Hz,光伏、储能、负荷初始态同场景2。
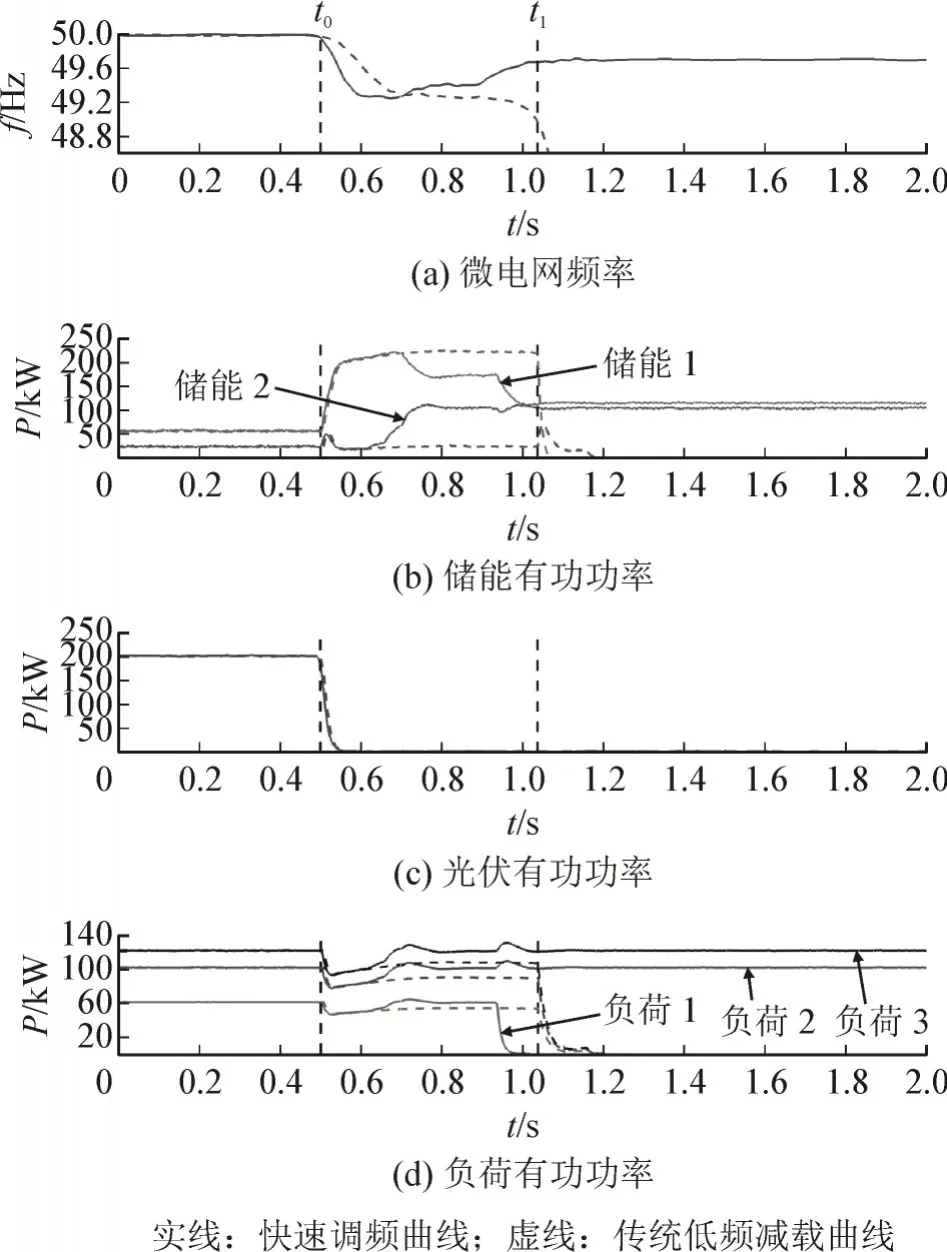
图9 二次调频影响下的调频策略试验波形比较Fig.9 Test waveform comparison of frequency modulation strategy under the influence of secondary frequency modulation
相比较场景2 下的图8,图9 快速调频整个动作过程与之类似,而低频减载策略则完全不同,原因是t0=0.5 s 时刻光伏1 跳闸后,系统频率迅速跌落至49.25 Hz,高于低频减载定值49.2 Hz,低频减载不动作,储能1 持续处于控制电流环饱和限流状态,t1时刻过流跳闸,微电网失去主电源,系统崩溃。而快速调频策略根据二次调频参考功率值实时计算得到低频调频动作门槛为49.5 Hz,因此t0时刻光伏1 跳闸后,PQ 储能和减载均能正确动作,最终频率稳定在49.7 Hz。
上述试验结果表明,当投入二次调频后,发生功率扰动导致有功严重不足时,传统低频减载发生拒动进而导致系统失去稳定。同样,当功率过剩,传统高频切机也可能拒动。而本文快速调频策略动态调整动作门槛,自适应因二次调频引起的正常运行频率区间偏移,能够准确动作。
4 结语
本文分析了主从控制下的独立型微电网大扰动暂态频率特征,基于对微电网内PQ 源快速调节潜力的挖掘,计及二次调频的影响,提出了一种快速调频策略并研制了MGCC。通过理论分析和试验验证,得到以下结论:
1)独立型微电网频率理论运行区间受到二次调频参考功率的变化而发生偏移,传统低频减载/高频切机频率定值难以兼顾,易引起拒动或误动。
2)独立型微电网遭遇功率扰动,超过主电源最大可调节功率时,主电源电流控制环将进入饱和限流状态,微电网系统面临系统崩溃的风险。
3)硬件在环试验验证了快速调频策略不受二次调频引起的运行频率区间偏移影响,并在百毫秒内完成PQ 源有功的调节,辅助主电源进行紧急调频,提高了暂态频率稳定性。
基于本文提出的快速调频策略研制的MGCC已应用于国内外数十个独立型微电网项目中。
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
能源工程(2021年5期)2021-11-20 05:50:42
煤气与热力(2021年6期)2021-07-28 07:21:24
数学物理学报(2019年4期)2019-10-10 02:38:56
通信电源技术(2018年3期)2018-06-26 06:33:42
能源(2017年12期)2018-01-31 01:42:59
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
电源技术(2016年2期)2016-02-27 09:05:08
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年9期)2016-01-18 03:46:04
