
基于光纤光栅传感器的体外血管模型应力测量
2022-11-03 14:05赵冠棋初大平
应用光学 2022年5期
张 妍,张 帆,2,赵冠棋,初大平,2
(1.北京信息科技大学 光电测试技术及仪器教育部重点实验室,北京 100192;2.北京信息科技大学 先进光电子器件与系统创新引智基地,北京 100192;3.首都医科大学附属北京安贞医院急诊危重症中心,北京 100029)
引言
人体内部的血液流动会产生作用于血管壁的应力,其中包括垂直作用于血管壁的正压力、平行于血管壁的剪切力和沿管壁圆周作用的周向应力[1-2]。这些力学刺激是血管结构与功能变化的重要调节因素,且细胞的形态、结构、功能和基因表达等都会随着这些力学刺激的改变而发生变化[3-4]。其中周向应力被认为与高血压、动脉粥样硬化及血管移植后再狭窄等血管重建现象高度相关[5]。研究表明,对心肌桥冠状动脉周向应力的测量有助于预防支架置入术中和术后冠状动脉的破裂等问题[6]。血管周向应力与动脉斑块的稳定性也具有高度相关性,周向应力的增加很有可能是导致斑块破裂以及血栓形成的重要因素[7]。
目前国内外针对周向应力的研究大多都是仿真的结果。通过建立狭窄动脉模型可以研究生理血流对周向应力的影响,研究表明,血管狭窄严重程度的增加可使平均压力升高,导致内皮细胞损伤[8]。此外,通过支架和斑块的三维仿真模型研究支架过大和植入位置不当对周向应力的影响,研究发现,支架过大与支架置入位置不当会导致周向壁应力增加41% ~ 72%,而较高的周向壁应力会导致斑块破裂,使破裂处血小板聚集而形成血栓[9]。由于在活体血管或血管模型中测量周向应力的传感手段不成熟,尚无实验可验证上述仿真的结果。
近年来,微流控技术发展迅速,使得模拟体内血管生物力学特性并在体外进行观测成为可能。微流控装置在进行实验时具有处理量高、试剂消耗少、设计灵活、不同条件下实验适应性强等优点[10-11]。此外,基于微流控技术的血管模型可以模拟体内的力学环境,简化体内的复杂条件,容易观测且部分基于微流控技术的体外血管模型已经能够替代动物实验研究。但是,基于微流控技术血管模型通常尺寸较小,在血管模型中测量周向应力分布鲜有报道。由于光纤光栅具有体积小、质量轻、成本低、质地柔软、灵敏度高等优点[12-13],在微流控芯片中的应力测量研究中具有应用潜力。
针对在体外血管模型中开展周向应力测量的需求,本文建立了基于微流控技术的体外血管模型,将光纤光栅传感器集成在体外血管模型内部,通过仿真研究了光纤光栅位置、血管模型结构参数对周向应力测量结果的影响,通过实验测量了血管模型内流体对血管周围组织产生的周向应力,为研究血液流动时对血管周围组织的影响提供了新的手段。
1 测量原理
当宽带光源发出的宽光谱光通过光纤光栅时,光将在刻在纤芯内的光栅上发生折射现象,由于光栅的栅距是呈轴向排列的,所以折射率在轴向上会呈现出周期性变化。而光纤中折射率的周期性扰动仅对具有特定条件的光波产生影响,所以,当含有不同频率的光脉冲进入光纤光栅时,由于周期性的折射率扰动,光会被分为两类,一类满足条件的光频率会被反射回来;另一类不满足条件的光频率就会不受影响直接透过光栅继续向前传输。这样的光纤光栅相当于反射镜,即光纤布拉格光栅(fiber Bragg gratings,FBG),其工作原理如图1所示[14]。
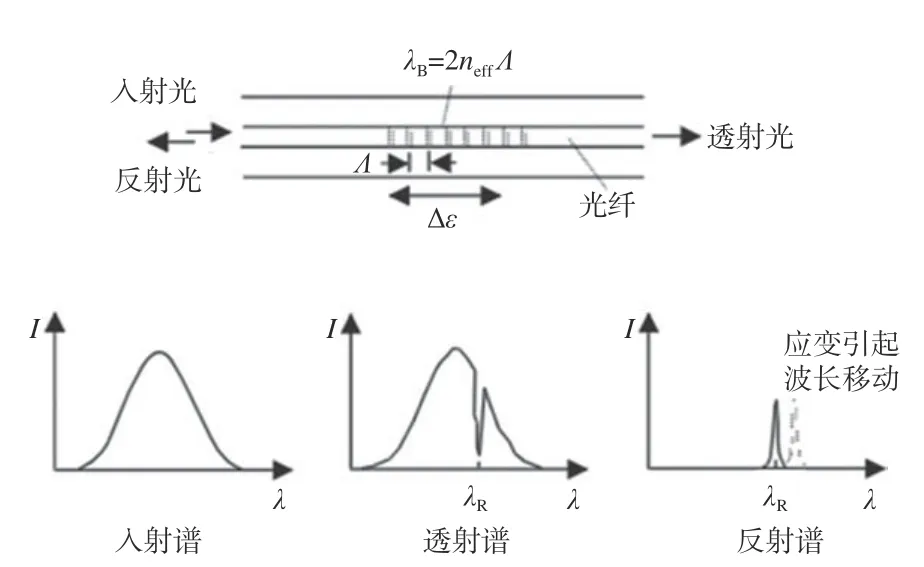
图1 光纤布拉格光栅原理图Fig.1 Schematic diagram of fiber Bragg grating
对于FBG,其反射光的中心波长由(1)式确定:

式中:λB为FBG 反射中心波长;neff为纤芯的有效折射率;Λ为光纤光栅的周期。
将光纤光栅中心波长的相对变化量定义为λB,根据布拉格条件得[15]:

如上所述,当光纤光栅受到外界条件的作用(如应力、温度等)时,会产生压缩或拉伸作用,将直接导致光纤光栅的周期Λ及纤芯的有效折射率neff发生变化,进而引起反射光的中心波长发生变化。应力变化和温度变化对中心波长λB的影响通常构建以下数学模型来描述:

式中:αf为热膨胀系数;ξ为热光系数;Pe为弹光系数。
通过上述公式可知,当光纤光栅所受应力或温度发生变化时,检测通过光纤光栅反射光的中心波长的改变量,就可以通过(3)式得到光纤光栅受到的应力或温度的变化情况。进而可知,光纤布拉格光栅传感器的主要检测对象是温度、应变和应力。
2 实验方法
2.1 血管模型模具设计与加工
使用Solidworks(2017 版)设计血管模型的模具。本研究以介入治疗的冠脉血管为研究对象,由于支架能进入血管的最小尺寸为2.25 mm,出于插入光纤光栅和二次固化的考虑,设计圆形血管通道直径为3 mm,模具中的方形流道尺寸为4 mm。如图2所示,图2(a)为流道尺寸图,图2(b)为模具图。
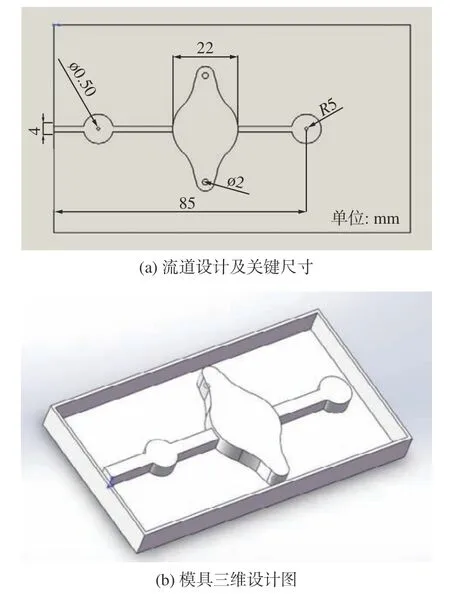
图2 模具及流道Fig.2 Mold and flow channel
模具的加工方法有光刻、精密机械加工及3D 打印。光刻的表面比较光滑,精度较高,但成本也相对较高,适用于小尺寸的血管模型加工;3D 打印的树脂结构成本较光刻低,但表面粗糙度较差,不利于脱模[16];而精密机械加工成本最低,表面粗糙度和加工精度适用于本研究中大尺寸血管的加工[17]。本文利用精密机械加工的方法在聚甲基丙烯酸甲酯(PMMA)材料上加工模具,联合软光刻铸膜的方法,加工血管模型。加工后的模具如图3所示,模具进行分体式加工,以便于脱模。

图3 PMMA 模具Fig.3 Mold fabricated with PMMA
2.2 方形截面流道与圆形截面血管模型的加工
制作体外血管模型工艺流程如图4所示。对模具硅烷化处理12 h,以便于一次脱模。将PDMS预聚物与固化剂按照10∶1 的比例混合均匀,置于真空干燥箱(DZF-6020,上海一恒科技仪器有限公司,中国)中抽气,除去其中的气泡。将抽气后的PDMS 混合物浇铸在硅烷化后的模具上,在65 ℃下固化40 h,脱模后得到PDMS 方形流道模型。使用PDMS 打孔器切割液体出入口和二次固化孔、光纤集成孔。使用等离子清洗机(PDC-002-HP,HARRICK PLASMA,美国)活化石英片表面,将PDMS 模型与石英热压键合,得到截面为方形的血管模型。
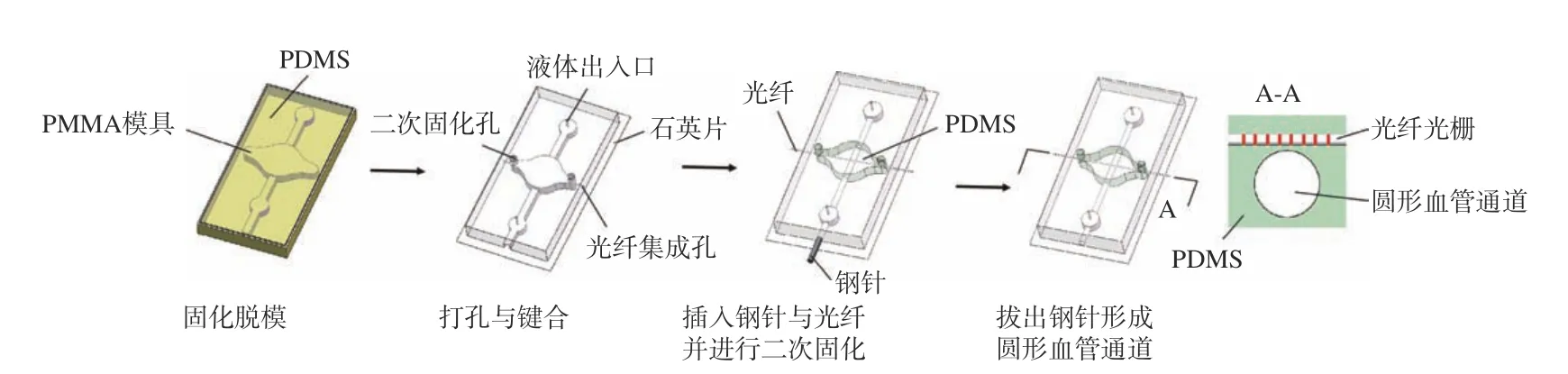
图4 体外血管模型加工过程Fig.4 Machining process of blood vessel model in vitro
为了更接近体内环境,在方形截面血管模型的基础上,加工截面为圆形的血管模型。将PDMS预聚物与固化剂按照20∶1 的比例混合均匀,将直径为3 mm 的钢针插入方形流道中,将经过20 min等离子体清洗的光纤通过侧面光纤集成孔插入二次固化区域。通过二次固化口引入PDMS 混合物,除气后在110 ℃下加热8 h。钢针拔出后在PDMS 内形成一个圆形通道作为血管模型,嵌入PDMS 内的光纤光栅与血管模型形成了较为稳定的封装。
制作血管模型的材料有水凝胶、PDMS 及3D打印的硬质材料。硬质材料与体内任何血管的弹性模量都不能匹配;水凝胶适用于人体内大部分组织,但由于硬度不够,在毫米级别的血管中容易坍塌;而PDMS 的硬度可调,易于成型且操作简单,被用于大多数的体外血管模型中。为了更加接近心肌组织的弹性模量,本文选择PDMS 预聚物与固化剂的比例为20∶1 来模拟血管的周围组织。
2.3 仿真液体流动时对周围组织的应力分布
基于本文所建立的体外血管模型,采用COMSOL Multiphysics(5.5 版)仿真软件模拟液体流动时对血管周围组织及血管壁的周向应力分布。建立血管模型,并在其中嵌入光纤,通过OCT(optical coherence tomography)系统[18]测出实验所用体外血管模型中嵌入光纤到圆形流道的距离,根据测得的距离设置仿真中光纤到流道的距离,建立模型如图5所示,蓝色部分为光纤,光纤在血管中心±2.5 mm的区域为栅区。设置血管周围组织材料为PDMS,设定流固耦合物理场,为与实验条件保持一致,对血管周围组织下表面施加固定约束,然后对血管入口处分别施加不同的流速来模拟血液流动的速度,流速范围为8 mm/s~75 mm/s。仿真得到液体流动时光纤光栅处的应力分布情况即液体流动时对血管周围组织及血管壁的周向应力分布。

图5 血管模型示意图Fig.5 Schematic diagram of blood vessel model
3 实验结果与分析
3.1 光纤光栅处的应力分布仿真
对血管入口处施加不同的流速来模拟血液流动的速度,得到不同的速度下光栅处所受应力的情况。当流速为75 mm/s(成人静止时左冠状动脉的平均流速)时,其应力如图6所示,栅区位置受到的应力值最大,约为94.6 kPa。
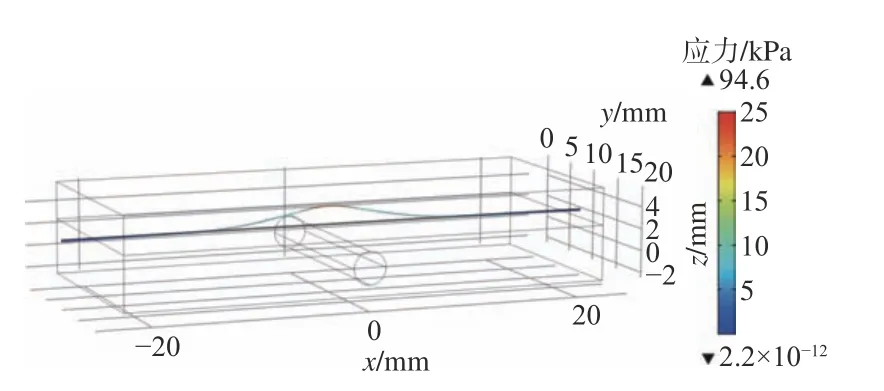
图6 光纤处应力结果图Fig.6 Diagram of stress results at optical fiber
结合本课题实际情况,针对截面速度为8 mm/s、21 mm/s、34.5 mm/s、59 mm/s、75 mm/s 的情况分别进行了仿真。仿真实验中光纤光栅处所受应力随速度变化如图7所示,对其进行线性拟合,可得到应力σ与速度v的关系为
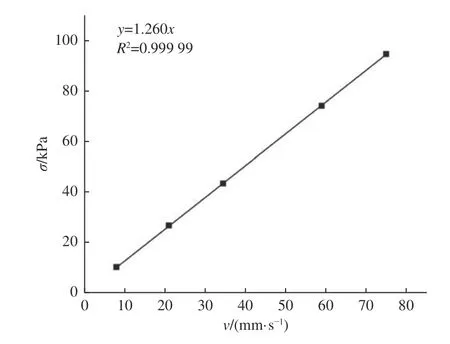
图7 应力-速度线性关系Fig.7 Linear relationship of stress-velocity

为了探究最佳的实验条件,以便在实验过程中取得更加显著的结果。本文还针对流道的形状、流道的尺寸及栅区的位置进行了仿真。如图8所示,从图8(a)可以看出,当方形流道边长与圆形流道直径都为3 mm 时,相同速度下,方形流道光栅所处位置B点比圆形流道光栅所处位置A点所受的应力明显更大,通过计算可知,B点比A点所受应力大47%。虽然方形比圆形流道所受应力更大,但圆形流道更加符合人体生理特征,且在后续介入治疗研究中便于放入球囊或支架,所以本文的后续研究选择圆形的血管模型。由于一般球囊的直径为2 mm~4 mm,所以仿真流道尺寸为2 mm~4 mm 时的应力值。以下流道形状均为圆形流道,从图8(b)可以看出,在相同的流道形状及速度下,当流道尺寸为2 mm 时,其所受应力最大,在流道尺寸为2 mm~4 mm 之间时,流道尺寸逐渐增大时,光栅处所受应力值逐渐减小,且随着流道尺寸的增大,应力值差分别为31%、27%、8%、8%。图8(c)为栅区不同位置的应力分布图。可以看出,当x轴坐标为0 时,栅区位于血管模型中心正上方,此时所受应力最大,所以在后续实验中封装光纤光栅时应尽量使光纤光栅的栅区位于血管模型中心正上方处。
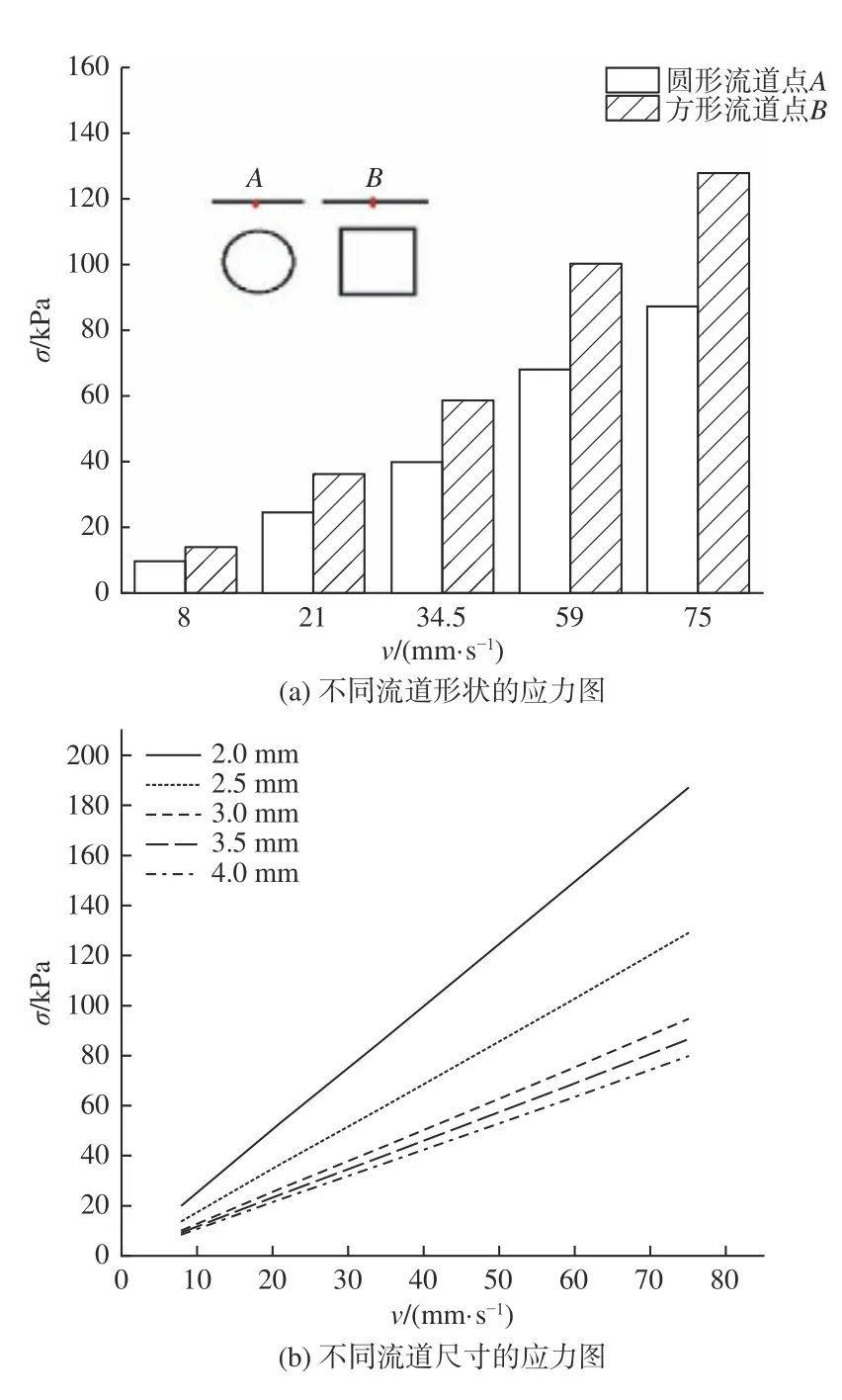
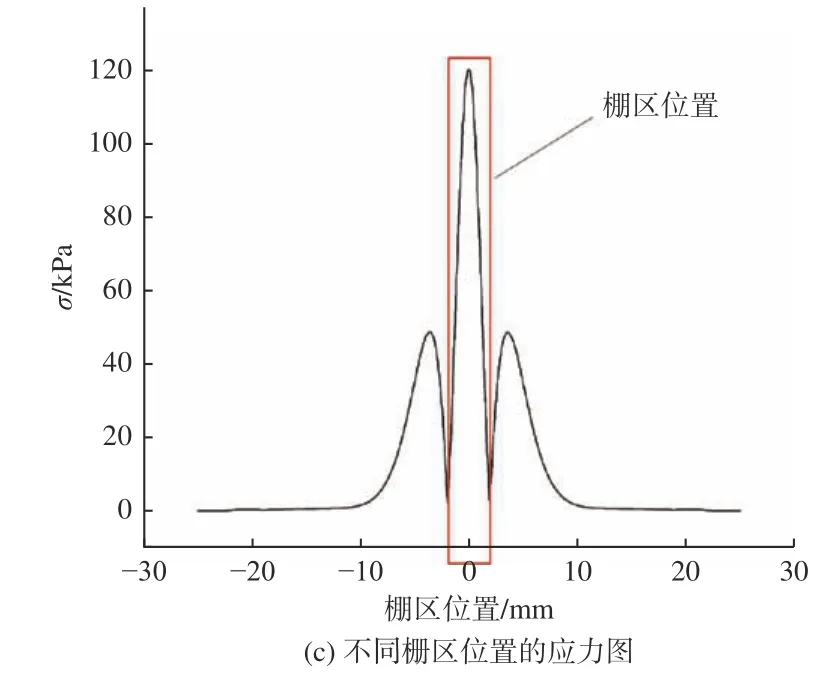
图8 仿真结果图Fig.8 Diagram of simulation results
3.2 实验测量与计算
将光纤光栅键合在体外血管模型中使其形成稳定的封装结构,如图9所示。光纤光栅的中心波长为1 535.5 nm,栅区长度为5 mm,实验装置如图10所示。通入流体之后,监测流速为0 时的反射波长,在这个波长的基础上进行不同流速下血管模型的应力测量。在血管模型中施加不同的流速,得到光纤光栅波长的变化率,并进行多组重复实验,消除实验误差。本文进行了5 组重复实验,设 置 流 速 依 次 为8 mm/s、21 mm/s、34.5 mm/s、59 mm/s、75 mm/s,与仿真所设置的速度一致。其反射光谱如图11所示。根据光栅的波长平均变化值可得到不同流速下,光纤光栅的波长改变量随速度的变化关系,如图12(a)所示。
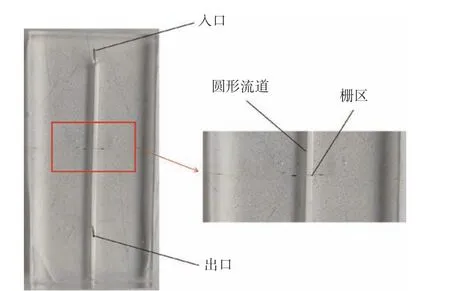
图9 体外血管模型与光纤光栅的封装结构图Fig.9 Package structure diagram of blood vessel model in vitro and fiber Bragg grating
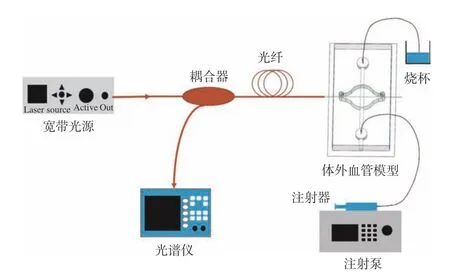
图10 实验装置图Fig.10 Diagram of experimental device

图11 FBG 反射光谱图Fig.11 Reflectance spectrum diagram of fiber Bragg grating
根据仿真与实验结果,可得到应力与速度和光栅波长改变量与速度的关系:

式中Δλ为光栅波长改变量。根据(5)式可得到应力与波长改变量的关系为

根据(6)式,测得光栅的波长变化即可得到液体流动时对血管壁的周向应力值,如图12(b)所示。
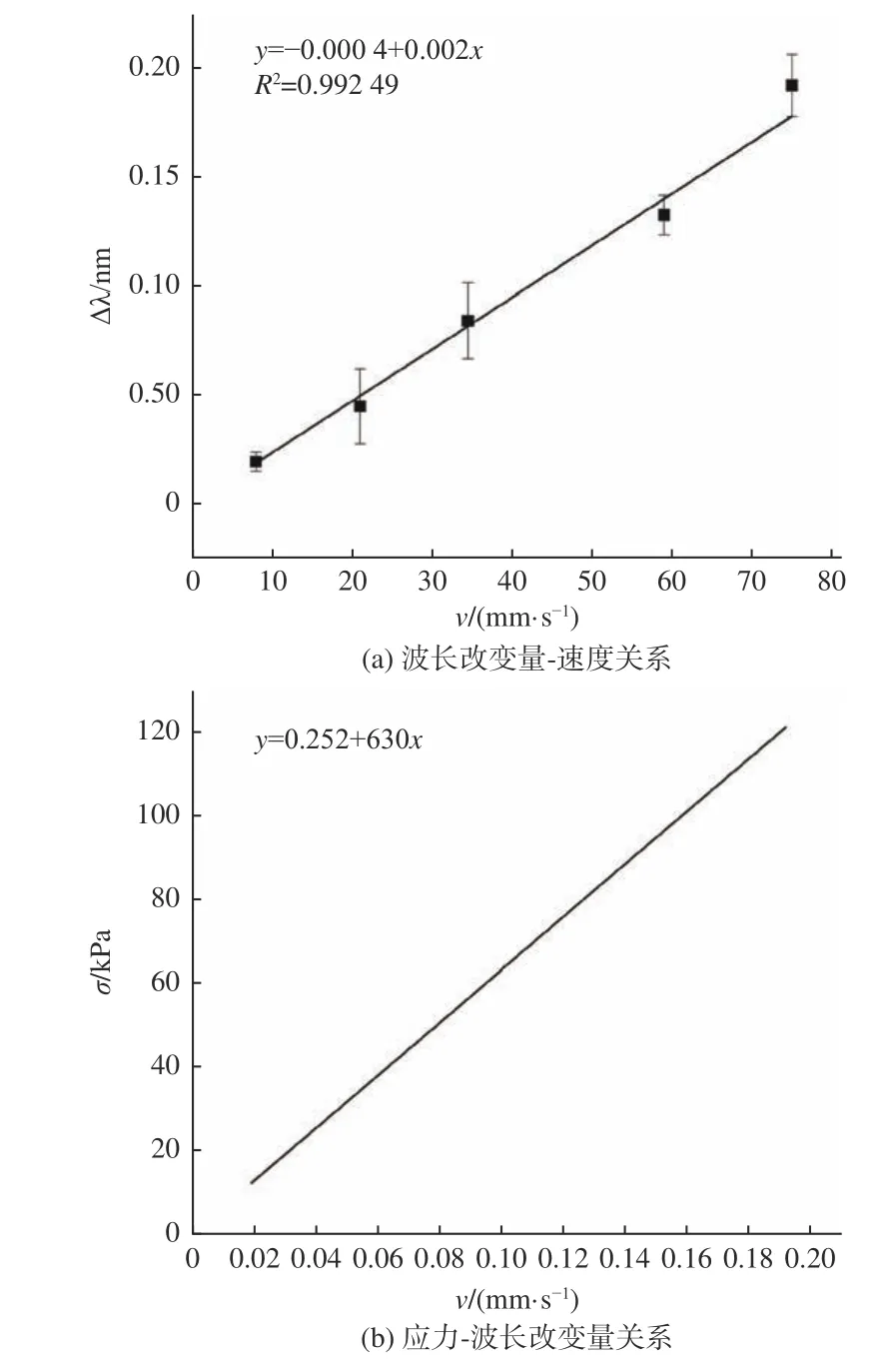
图12 实验结果关系图Fig.12 Relation diagram of experimental results
根据光纤光栅的出厂参数1.2 pm/με,可将波长改变量转化为应变,结合仿真实验得到的不同流速下光纤光栅处应变的情况进行对比,误差在10.6% ~ 26.6% 之间,如图13所示,验证了实验的正确性。

图13 不同流速下 仿真与实验测得的应变值 比较Fig.13 Comparison of simulated and experimental strain values at different flow rates
目前可以通过应变片式传感器、FBG 传感器测量应力。应变片式压力传感器一般用于测量较大的压力,广泛应用于测量管道内部压力、发动机和导弹试验中的脉动压力等,其体积较大难以键合在体外血管模型中,且对于微小应变难以测量;FBG 传感器具有体积小、质量轻、成本低、质地柔软、兼容性好等优点,可集成在微流控通道中,实现应力的测量。
4 结论
本文提出了一种利用钢针模具建立圆形体外血管模型并通过光纤光栅测量体外血管模型周向应力的方法,建立了直径为3 mm 的圆形体外血管模型,将光纤光栅键合在模型中测得其波长改变量与速度的关系。通过仿真实验研究了在不同流速下,光纤光栅处的应力分布情况。将实验结果与仿真结果相结合,得到不同流速下,血管壁所受应力与波长改变量的关系。本文提出的测量方法可应用在不同微流控芯片上进行应力测量,为流速、介入式治疗等力学刺激下产生的血管周向应力的体外测量提供了新的思路。
猜你喜欢
中国交通信息化(2022年5期)2022-07-23
舰船科学技术(2022年11期)2022-07-15
杭州电子科技大学学报(自然科学版)(2022年3期)2022-06-08
航空发动机(2022年1期)2022-03-11
阅读(科学探秘)(2021年8期)2021-09-01
电子制作(2019年24期)2019-02-23
科技信息·下旬刊(2018年9期)2018-10-21
航空发动机(2018年4期)2018-09-18
北方交通(2016年12期)2017-01-15
湖南大学学报·自然科学版(2014年3期)2014-12-30
