
列车牵引制动指令冲突故障分析
2022-11-02 06:37曹楠杜东伟刘斐然魏志恒
中国设备工程 2022年20期
曹楠,杜东伟,刘斐然,魏志恒
(1.北京市地铁运营有限公司运营四分公司,北京 100000;2.中国铁道科学研究院城市轨道交通中心,北京 100081)
地铁车辆对牵引传动系统的安全性、可靠性、稳定性要求很高,若该系统发生故障,严重影响列车的正常运营,对牵引类故障处理方法进行归纳总结。目前,文献对牵引典型故障案例进行分析,文献总结分析了列车牵引制动指令冲突故障分析及改进措施,文献对各城市地铁线路的牵引制动故障进行了总结分析。本文在不改变ATO驾驶的情况下,提出列车牵引制动指令故障的处理方法,预防地铁运营风险。
1 牵引、控制系统组成及特点
1.1 牵引及控制系统组成
北京地铁某线DKZ32型列车沿用了北京10#线东洋电机的牵引及控制系统。
东洋电机主要由牵引、控制系统2部分组成,如图1所示。
一是网络控制系统,主要功能是接收司机控制手柄或自动驾驶系统的牵引、制动指令,并将该指令通过profibus总线进行传递。二是VVVF装置(Variable Voltage Variable Frequency),主要功能是在接收到网络控制命令后,对每节列车的4台180kW三相交流电动机进行相应控制,最终达到控制列车前进,减速、停车的目的。
1.2 牵引及控制系统特点
北京地铁某线DKZ32型列车牵引控制系统在ATO自动驾驶及电制动效果2方面,是运用效果最好的城市轨道交通线路之一。
其电制动装置可以将车速下降到5km/h以下,全自动驾驶停车误差小于±1cm,保证了乘客的乘车舒适度及登乘需求,又因为高效的电制动,大大减少了列车制动闸瓦、闸片的消耗,每年可减少近百万元的维护费用。达到如此效果的其中一个原因就是VVVF牵引逆变器装置控制采用了矢量控制方式,替代了以往做为主流的标量控制方式,提高了牵引电机输出扭矩的控制的反应速度和精度。另外,对外部干扰因素的过渡反应性和追从性的性能卓越,可充分发挥这些特性,实现高速、高精度的粘着控制。
2 DKZ32型列车牵引控制系统
2.1 DKZ32型列车牵引控制系统高压部分
列车牵引控制系统高压部分是由第三轨上部供电方式供电,供电电压DC750V,变动范围:DC500V~DC900V,经VVVF中的IGBT逆变后给牵引电机供电。电机型号为TDK6175-C三相鼠笼型感应电动机,主要参数为 180kW、550V、240A、77Hz、2255rpm/h。
主要工作路径,直流750V电压经过:受流器、断路器箱后向VVVF系统供电并通过IGBT逆变后传送至电机使用。列车牵引控制系统高压部分电路图,如图2所示。
2.2 DKZ32型列车牵引控制系统低压部分
列车牵引控制系统低压部分是由DC110V供电,变动范围:DC77V~DC121V。经司控器手柄变化后转变的PWM信号传输至IO/IF单元,再经IO/IF单元将运行指令传输至VVVF箱内,VVVF箱内的控制放大器在接收到指令后控制IGBT,最终控制牵引电机动作。
主要工作路径,(1)司控器手柄变化后,(2)PMW会向,(3)IO/IF单元输出控制指令,IO/IF单元随后会将信号传送至,(4)VVVF控制箱中,最后通过控制IGBT使牵引电机达到想要的工况。列车牵引控制系统低压部分电路图,如图3所示。
2.3 牵引制动指令控制部分介绍
(1)有关牵引和制动指令的传。DKZ32行列车牵引和制动指令的整个传输过程中主要有3个步骤:①列车牵引力和制动力的控制,分为列车自动驾驶(ATO)模式和手动驾驶(ATP)模式;②编码器电流范围4~20mA,电压范围0~10V,转换成PWM指令传输给列车制动系统、牵引系统;③车辆控制单元接收到指令后对PWM信号进行解码,车辆依据PWM实际值进行制动和牵引。
(2)制动和牵引指令的产生。ATP驾驶模式时其指令主要由司控室的手柄和级位手柄发出,惰行位、牵引位、常用制动位、快速制动位等是主要级位,常用的是制动位和牵引位2种级位。司控器传输到编码器的指令,信号可以通过0~10V的电压来传输,或通过4~20mA的信号对其进行传输,电压实际信号容易实现,但其容易受到干扰,对数据造成影响,所以电压传输信号时,对EMC的设计要注意耦合性干扰,要将编码器安装在司机可以控制的地方,或采用屏蔽性双绞线接地,避免其受到干扰。
(3)有关制动指令与牵引指令的变换。司控器将牵引指令传输给编码器,编码器在将指令传给调制器,脉宽的实际输入电流是4~20mA,电流信号转换成PWM信号后,其信号频率只有几百赫兹,幅值是几十伏。
(4)制动指令和牵引指令的接收。制动和牵引指令转换为PMW信号时,也会将电流传递出来,电流传递时会受电缆长度、辅助逆变器、VVVF等设备的影响,造成PWM信号会耦合噪声电压。
(5)PWM信号的传输线。传输线耦合电压后唯一可以改变的是信号的幅度,不能改变信号的宽度,提高信号抗干扰能力的方法是,通过接收端将电路整形,消除电路内的噪声。
3 PBF故障分析
3.1 案例情况描述
某线YZ012列车5#车发生牵引制动指令同时施加故障,导致列车无法动车、清客救援,造成正线晚点,降低运营服务质量。从故障发生时的事件记录仪的数据及VVVF记录的故障记录来看,判断为下列状态时发生了FAIL中PBF故障。
故障时间段记录仪数据,如表1所示。
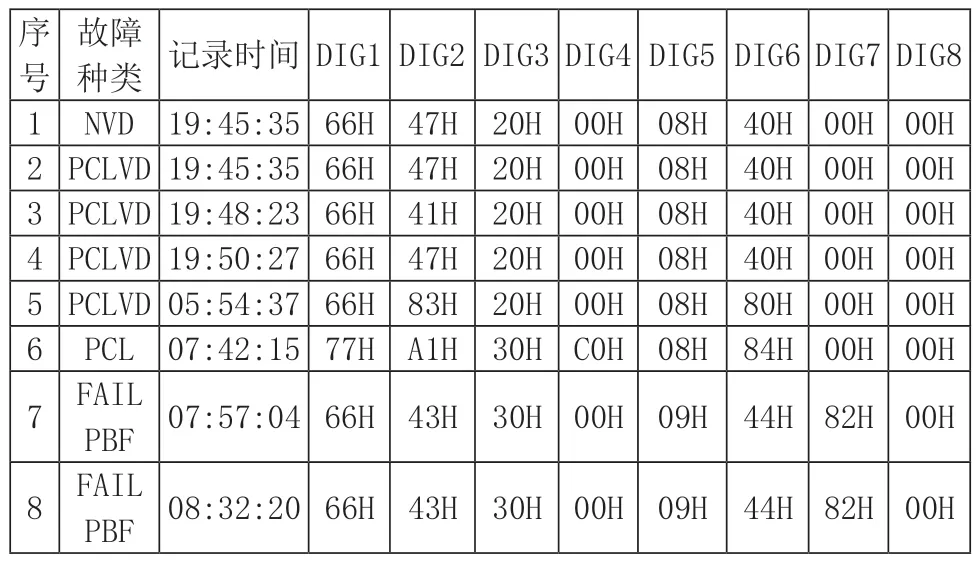
表1 故障时间段记录仪数据
当某一车辆的VVVF上发生异常时,调查方法是检查低压接线箱-控制放大器之间的“前进/倒车”“牵引/制动”配线上有无错误配线或混合接触。控制装置故障调查方法,如表2所示。

表2 控制装置故障调查方法
3.2 故障查找与分析
(1)故障查找。首先,技术人员按照要求,对相应所有接线进行了仔细排查。在确认接线状态良好,且多车陆续出现问题后,技术人员将接线及插头的可能性排除。主要检查点,如图4所示。
随后,开始比对所有故障车的时间记录后发现,所有车的故障地理位置完全统一。宋家庄出站后720m,此时为R=350m的大弯道。亦庄火车站为下行出站后180m,此时为下行至上行的道岔。宋家庄站故障点和亦庄火车站故障点,如图5所示。
为了验证是否为软硬件设计缺陷问题导致,开始逐一分析各项技术指标、软件逻辑、硬件设计等因素。在调取电机故障时故障参数时,发现故障时R倒退方向存在制动电流Iq[A]。故障时R方向存在制动电流Iq[A]图,如图6所示。
(2)故障点确认。从故障发生时的事件记录仪的数据、VVVF记录的故障记录来看,判断为下列状态时发生的PBF。①在ATO自动驾驶,牵引状态时;②ATO输出的牵引量指令非常小(20%以下比手柄操作时,牵引1级还小),当①和②同时成立的状态下,VVVF输出扭矩电流(Iq)的值变为50A以上(制动方向),将造成列车PBF故障。
3.3 问题分析
(1)轮径问题。地铁列车正常轮径在770~840mm之间,某线DKZ32型列车每节列车的轮径差没有要求,而故障车的轮径均在780~800mm之间,且临近的两节列车的轮径均在830mm以上,各节车轮径差超过30mm。而每节列车在接收到的牵引指令大小一样的情况,电机实际的负载,工况存在差异。
(2)轮轨问题。在核对轨道线路图后发现,发生故障时列车正在通过道岔,或半径较小弯道,轮轨配合条件较为恶劣,对电机会存在部分影响。
综上所述,在轮径差较大且列车通过道岔时,若ATO输出了一个较低的牵引指令时,因车轮空转或其它机械原因造成转子速度大于定子速度,并随之产生制动电流,最终引发了此故障。
3.4 改进措施
(1)软件更改。针对上述情况,对牵引控制软件进行了修改更新,在牵引指令较低,制动电流较小时不再认为是故障情况。
(2)修改说明书。东洋对产品说明书,故障处理建议进行修改,增加内容如下:①前进指令(4号线)和后退指令(5号线)同时得电时;②牵引指令(12号线)和制动指令(5号线))同时得电时;③TMS牵引指令(M122号线)和TMS制动指令(M123号线)同时得电时;④在牵引状态下,制动方向的扭矩分电流(Iq)大于50A时;⑤电制动状态下,牵引方向的扭矩分电流(Iq)大于50A时。
(3)镟轮要求。列车镟轮时,避免各车之间的轮径差大于30mm,确保各设备在最佳状态下工作。
4 结语
对于牵引、制动指令同时存在的故障,本文在不改变ATO驾驶的情况下,提出了相应的解决措施,结果表明措施有效并根除了类似故障,同时在故障查找时应先明白电机原理,从底层数据和电路图分析入手,深入了解各系统之间的配合关系,这样才能有效清除故障,确保地铁的安全运营,提高运营的服务质量。
猜你喜欢
学苑创造·B版(2022年4期)2022-06-19
农机质量与监督(2021年5期)2021-07-02
学校教育研究(2020年11期)2020-06-08
现代城市轨道交通(2020年1期)2020-02-14
科技与创新(2019年2期)2019-02-14
船海工程(2018年6期)2019-01-08
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10
中华少年(2009年9期)2009-09-14
