多传感器融合的铁路隧道自动化作业研究
2022-11-01 06:26:58贺小琼肖世德赖焕杰
电气化铁道 2022年5期
贺小琼,肖世德,赖焕杰,熊 鹰
0 引言
在进行电气化铁路隧道打孔等作业时,首先需要人工测量和激光投射确定隧道顶壁打孔位置。采用人工定位打孔位置坐标,作业进度慢,耗时耗力,由于现场工作环境潮湿、偏暗、复杂,作业存在安全隐患。近年来,传感器技术发展迅速,广泛应用于资源勘探、航空、自动驾驶等领域,传感器测量具有速度快、分辨率高、非接触测量等优点[1~3]。
文献[4]研究将红外相机与毫米波雷达融合,用于在夜间场景下检测行人,将毫米波雷达检测目标运动状态特征的优势与视觉传感器获取目标类别特征的优势相结合,并采用YOLO 目标检测算法提升检测的准确率,得到了比传统方法更为精确的检测结果。文献[5]提出将立体视觉与激光雷达融合,用于检测车辆目标外形位置,将深度学习与点云数据处理结合,先对图像和点云进行目标检测,再确定目标外形与位置,对目标进行融合,最后确定目标的最终外形与位置,得到了较好的检测结果。文献[6,7]研究采用毫米波雷达与视觉传感器融合的方法进行车辆跟踪,从而提高车辆前向防碰撞系统对环境感知的准确性,剔除了非危险目标、虚假目标的影响,获得了良好的跟踪效果、较强的适应性和较高的准确率。
针对铁路隧道电气化打孔与吊柱安装作业需求,本文提出一种将激光雷达、毫米波雷达、激光测距传感器融合的作业方法,用于实现电气化铁路作业车辆的自动驾驶和自动定位隧道顶壁打孔点的位置。各传感器安装在作业车辆上,在车辆行驶过程中,毫米波雷达实时探测前方障碍物,激光测距传感器实时判断车身在隧道中的行驶状态[8],激光雷达实时扫描并获取隧道顶部轮廓的点云数据,完成打孔点位置坐标定位后,机械手移动到打孔位置进行打孔,实现作业自动化。
1 传感器整体布局
采用N30103B 型单线激光雷达,扫描得到二维点云数据,扫描范围0~30 m,扫描角度为360°。毫米波雷达采用ARS408-21 型号,最大探测距离为250 m。激光测距传感器采用HZH-F50 型号,量程为10 m。
传感器安装于隧道作业车辆上,其整体布局如图1 所示。激光雷达安装于车辆顶部扫描隧道顶部截面轮廓,毫米波雷达安装在车辆前方下部探测道路前方的障碍物,4 个激光测距传感器对称安装在车辆两侧,用于测量车身到隧道两壁的距离。
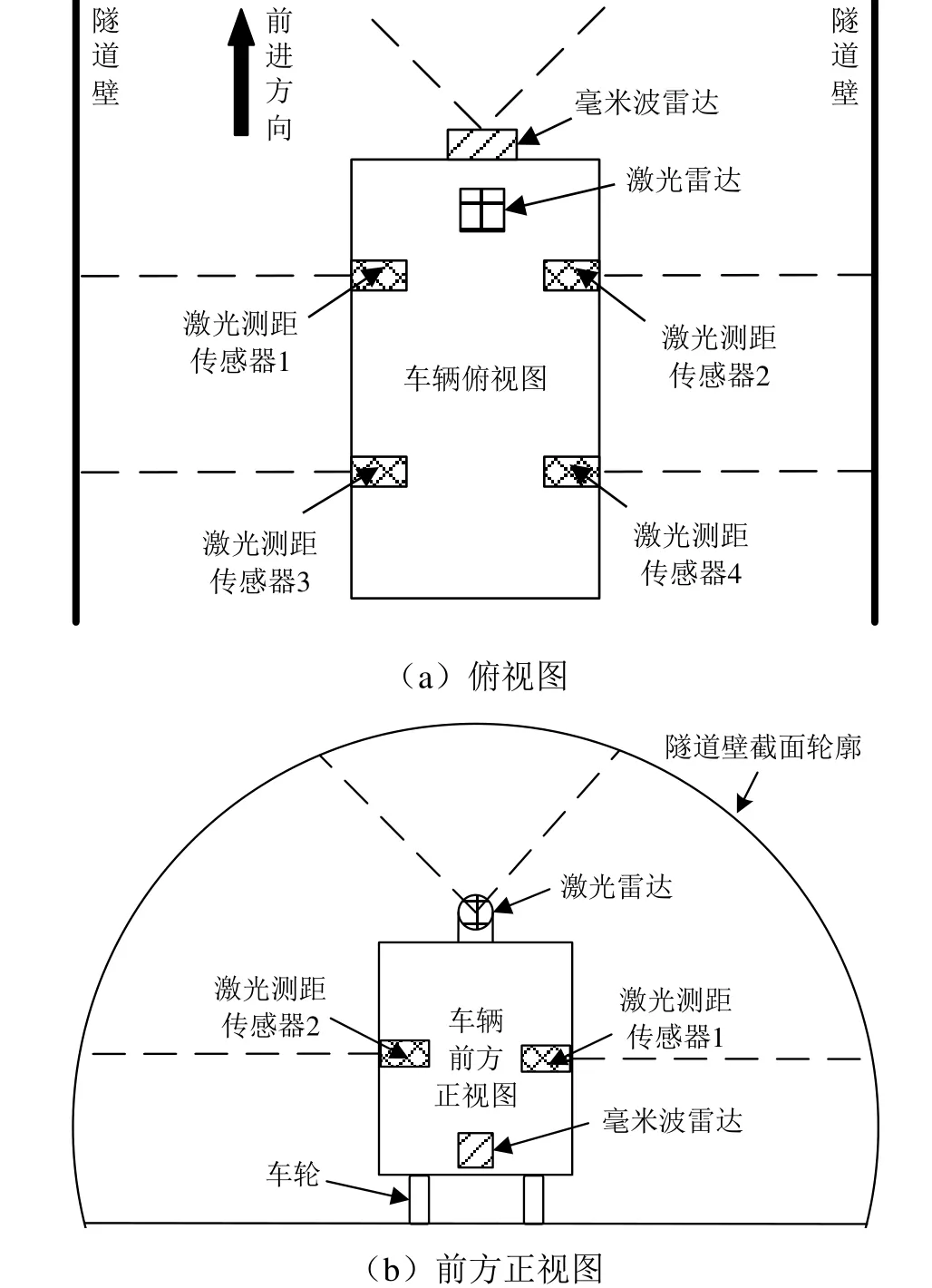
图1 传感器布局
传感器与工控机之间的通信方式如图2 所示,激光雷达采用以太网通信,毫米波雷达采用CAN总线通信,激光测距传感器采用串口通信。各传感器采集到数据后通过工控机进行读取和数据处理,将处理后生成的执行指令,如是否停车、左转、右转及转动角度等信息,通过工控机CAN 总线下发至执行机构。
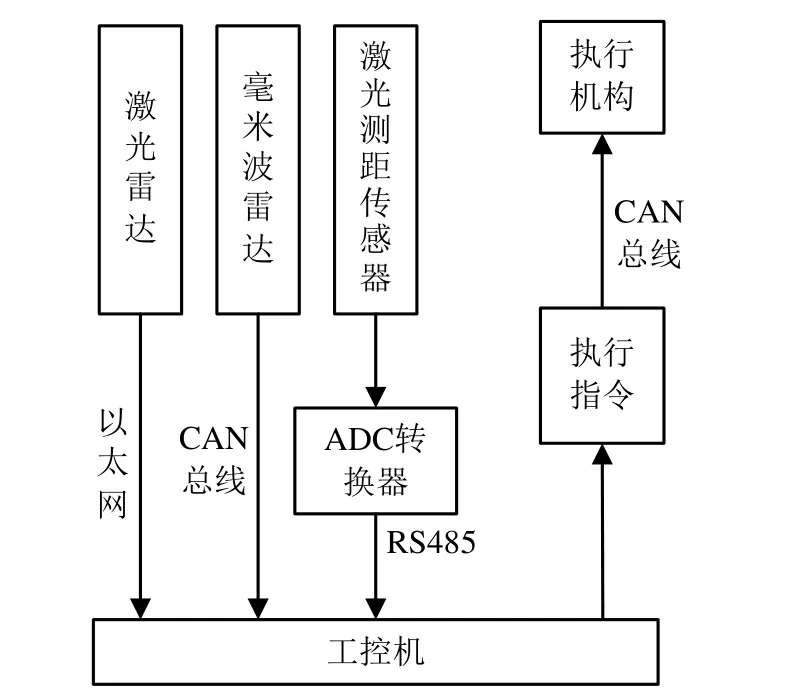
图2 传感器通信方式
2 传感器算法描述
2.1 激光雷达轮廓拟合算法
激光雷达扫描得到的点云数据为距离di和角度αi,根据式(1)将其转化为直角坐标值(xi,yi),其中c为点云总数量。采用点云库中的半径滤波算法滤除孤立点、噪声点和离群点。滤波原理:如果一个点在邻域半径范围内包含的点云数量达到邻域点数,则该点为有效点保留,反之则去除。

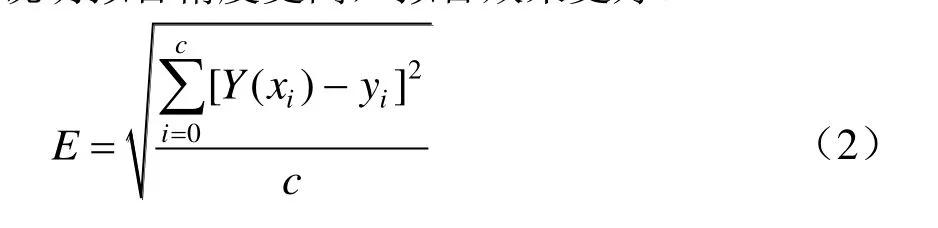
采用最小二乘法对滤波后的点云数据进行拟合[9],得到拟合系数ak(k= 0,1,…,n),其中n为拟合的多项式次数,最终得到拟合方程Y(x) =a0x+a1x2+…+anxn。采用式(2)计算拟合误差E,E越小说明拟合精度更高,拟合效果更好。
2.2 毫米波雷达避障算法
ARS408-21 型号毫米波雷达综合了宽视角中距离和窄视角长距离,采用目标模式采集数据,将探测到的任一目标用式(3)表示:

式中:l为目标与雷达的相对纵向距离;w为目标与雷达的相对横向距离;v为目标与雷达的相对速度;P为目标存在的概率。
根据目标相对雷达的位置不同可将目标分为4类:(1)危险目标,目标在车辆前方且距离车辆较近,需立即停车;(2)非危险目标,目标在车辆前方但距离车辆较远,此时无需停车,待车辆行驶至离目标较近时再停车;(3)无效目标,目标未处于车辆前方,而是处于车辆两侧,且目标与车辆的横向距离较大,对车辆前行不产生任何影响;(4)虚假目标,电磁波产生的噪声点,目标数据超出了传感器的检测范围,目标实际根本不存在,或目标与雷达的相对距离为0。
首先对毫米波雷达采集到的目标数据进行滤波处理,初步滤除无效目标和虚假目标。毫米波雷达的目标数据处理流程如图3 所示,当前方存在危险目标时才停车,存在非危险目标、无效目标和虚假目标时不停车,在车辆行驶过程中,不断循环读取毫米波雷达数据进行处理。
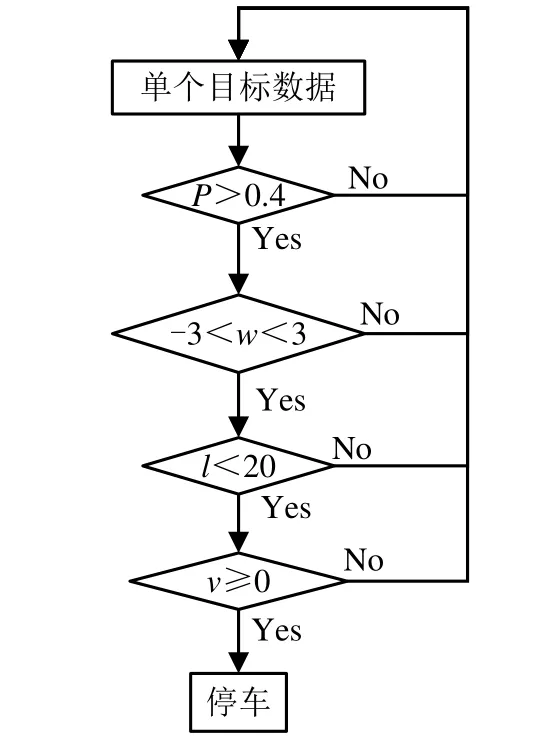
图3 目标数据处理流程
2.3 激光测距传感器转向算法
激光测距传感器检测车辆在隧道中行驶状态的原理如图4 所示。其中S1为车辆左侧前方激光测距传感器测量出到左侧隧道壁的距离,S2为车辆右侧前方激光测距传感器测量出到右侧隧道壁的距离,S3为车辆左侧后方激光测距传感器测量出到左侧隧道壁的距离,S4为车辆右侧后方激光测距传感器测量出到右侧隧道壁的距离,D为同侧两传感器的距离,θ为车辆行驶方向与既定行驶路线的偏角,S为车辆中心点偏离既定行驶路线的距离。
根据图4 中的4 个激光测距传感器的测量值S1、S2、S3、S4,可采用式(3)计算车辆的行驶偏角θ。当行驶方向偏向左时,θ为负值;当行驶方向偏向右时,θ为正值。根据式(4)可计算出车辆中心偏距S。当车辆中心偏离至既定行驶路线左侧时,S为负值;当车身偏离至既定行驶路线的右侧时,S为正值。
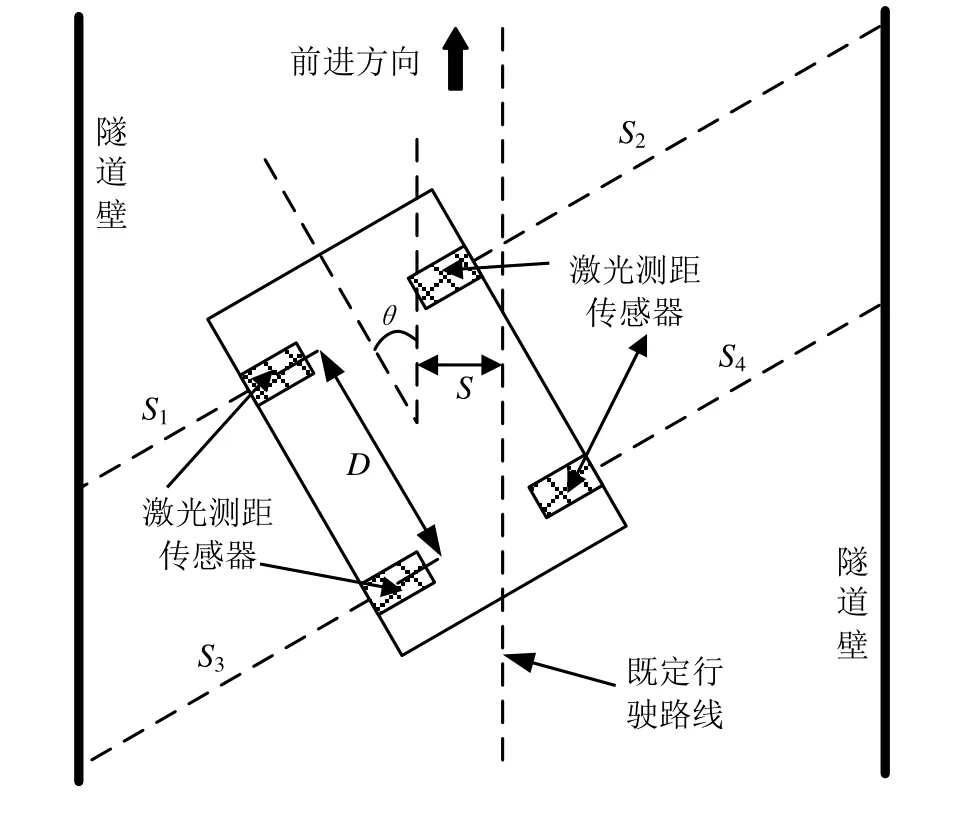
图4 车辆行驶状态检测原理

当车辆中心偏离既定行驶路线或行驶方向偏离既定行驶路线时,需要纠正车辆的行驶方向与行驶路线,使得车辆按既定行驶路线行驶。隧道作业车辆的行驶速度较低,可采用Stanley Method 实现自动驾驶车辆的轨迹追踪,式(5)为Stanley Method模型的计算式:

式中:δ为车轮平均偏角;k为增益参数;e为车辆前轴偏离既定行驶路线的距离;v0为车辆前轴中心速度。
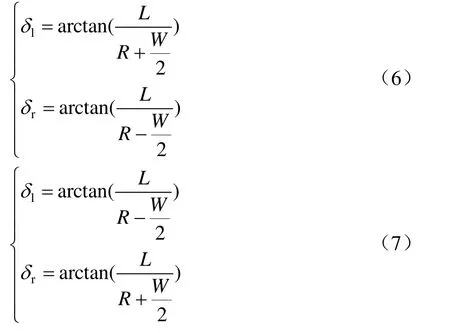
根据阿克曼转向原理,可计算出左右轮纠正的偏角。当行驶方向偏左时,需要右转纠正行驶方向,根据式(6)计算左右轮的转角;当行驶方向偏右时,需要左转纠正行驶方向,根据式(7)计算左右轮转角。式中:L为前后轮间距;W为左右轮间距;R为转向半径;δl和δr分别为纠正行驶方向时左轮和右轮需转动的角度;R可根据tanδ=L/R计算。
3 实验与分析
基于VC++编写了激光雷达、毫米波雷达、激光测距传感器的数据读取、处理与指令发送等程序,进行模拟实验。
利用激光雷达采集模拟隧道轮廓的点云数据,分别采用三次、四次、五次多项式对点云数据进行拟合,得出四次多项式拟合效果最好,四次多项式拟合结果如图5 所示,拟合曲线方程为y= -2.64×10-4x4- 0.02x3- 0.04x2- 1.04x+ 5.78,拟合误差为0.2,拟合耗时86 ms。根据拟合方程,输入打孔点的横坐标x0,可求出打孔点的位置坐标(x0,y0),而后机械手移动到该位置进行打孔。

图5 点云数据拟合结果
毫米波雷达模拟实验采集到的目标数据分布如图6 所示,图中黑色圆点为目标,每个目标的信息与最终处理的结果如表1 所示。车辆前方遇到不同的障碍物时可返回不同的结果,以实现车辆自动避障。
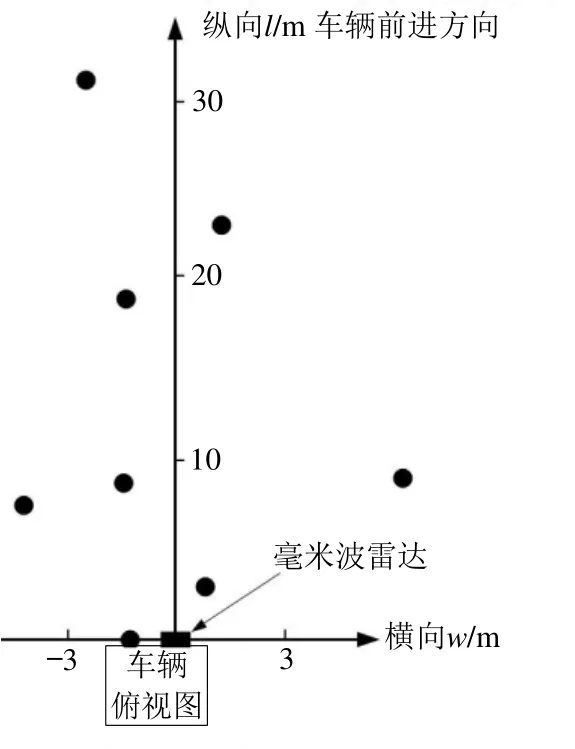
图6 雷达原始目标数据分布

表1 毫米波雷达原始目标数据
4 个激光测距传感器安装时D为3 m,车辆L为4 m,W为2 m,模拟实验时,v0为1 m/s,k设置为0.3。采集到5 个测量值,计算出车辆的偏角、偏距及纠正行驶方向左右轮需转动的角度,并将计算结果与实际测量值进行对比,以判度算法的准确性,多次实验结果如表2 所示。可以看出,计算值与测量值误差较小,转向角度较准确,能够实现在车辆行驶状态有误时及时纠正行驶方向。
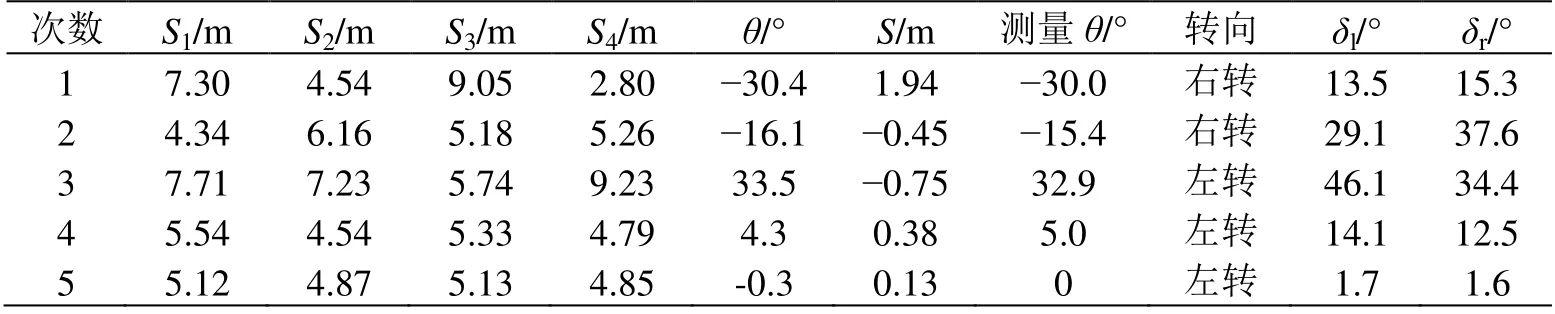
表2 激光测距转向实验
4 结论
提出了一种多传感器融合的铁路隧道自动化作业方法,将毫米波雷达、激光雷达、激光测距传感器安装于作业车辆,毫米波雷达与激光测距传感器用于实现作业车辆的自动驾驶,激光雷达定位隧道顶壁打孔点的位置。初步模拟实验证明,该方法能够初步实现隧道作业车辆的自动驾驶,即遇到障碍物及时停车,车身偏离既定行驶路线时能够及时纠正行驶方向,且能够较为精确地定位打孔坐标,为电气化铁路隧道自动化作业提供一种参考方法。由于作业车辆在运行过程中会产生震动,对激光雷达定位作业的定位精度有一定的影响,在遇到复杂情况时,转向控制精度可能会降低,需后续进行进一步的研究。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
中国交通信息化(2019年1期)2019-03-26 06:43:46
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
测控技术(2018年6期)2018-11-25 09:50:24
电子制作(2018年16期)2018-09-26 03:27:00
通信电源技术(2018年5期)2018-08-23 01:16:04
制导与引信(2017年3期)2017-11-02 05:17:00
火控雷达技术(2016年3期)2016-02-06 02:30:26