无人机线路自主巡检的动态轨迹规划方法
2022-11-01 03:32徐其春郭晨晨刘志明马亚运李建辉
电力系统及其自动化学报 2022年10期
徐其春,郭晨晨,刘志明,马亚运,潘 卓,李建辉
(国网冀北电力有限公司唐山供电公司,唐山 063000)
随着电力系统规模的不断发展壮大,输电线路的运维和检修工作也越来越重要。而长距离输电线路通常所处自然环境复杂恶劣,采用传统人工巡检存在巡检效率低、风险大、成本高等问题,因此,成本低、操作简便的无人机设备在长距离输电线路巡检作业中得到了广泛应用[1-3]。无人机巡线环境通常地形复杂、遭受的突发威胁多变,且在对高电压水平输电线路进行巡查时可能受到线路空间电场干扰[4],导致无人机发生故障甚至撞线事故。因此准确测定无人机与输电线路的安全距离、制定安全的巡检路线,对提升无人机巡检精度、实现智能化无人机巡线有着重要意义。
目前,已有许多成熟的测距技术,包括激光测距、超声波测距、红外测距、双目视觉测距技术[5-8]等。但在无人机巡线中常使用小型无人机进行作业[9-11],其特点为载荷小,无法挂载大型的测距设备,因此目前传统无人机巡线测距方法通常采用全球定位系统GPS(global positioning system)坐标转换测距或激光测距。但上述两种传统测距手段存在测量精度不高、设备结构复杂、巡线成本较高等问题。
国内外许多学者均对无人机轨迹规划进行了大量的研究,主要包括全局静态航迹规划和局部动态航迹规划两部分。其中,在全局静态航迹规划方面研究已较为成熟,例如:采用GPS 系统结合图像处理与跟踪算法保持在输电线路上方进行巡线飞行[12];引入智能群优化算法选取最优巡航路径[13-15]等。但全局静态航迹规划仅适于预先掌握的环境障碍信息规划航迹,无法应对巡线中可能发生的突发障碍,因此,目前研究重点主要集中于局部动态航迹规划。局部动态航迹规划通常被分析为一种多约束最优求解问题,此类问题多采用智能优化算法进行规划[16-22]。但采用智能优化算法虽然能在保证轨迹精度的情况下规避故障,但需要无人机额外挂载多种设备采集环境信息[23-24],而且随着环境复杂程度的增高需要大量时间规划新路径,导致无法规避突发障碍。
针对上述问题,本文提出一种基于静态、动态两种突发威胁的动态航迹规划的无人机输电线路自主巡检方法。首先,通过光学观测设备测量杆塔的成像高度及相邻杆塔的间距,计算无人机与输电线路间的安全距离;然后,将无人机巡线可能遭遇的各类突发情况分为静态威胁与动态威胁,建立两种突发情况下的航迹规划模型,采用改进双向快速扩展随机树RRT(rapidly-exploring random tree)算法进行航迹重规划;最后,根据上述巡检轨迹规划建立无人机自主巡检系统流程框架,实现全过程自主巡检。系统应用的结果表明,该系统可以提高巡线效率,降低巡检作业风险。
1 水平安全距离标准
长距离输电线路通常位于山区、丘陵等崎岖地形中,导致人工巡检成本高、风险大,而引入无人机巡检可有效解决该问题。但在无人机进行巡检作业时,由于长距离输电线路通常为高压线,线路周边分布有磁场干扰,影响无人机设备正常工作,甚至导致无人机失控发生撞线事故。因此,需要快速且实时测量无人机与线路间距离并进行调整,保障无人机在巡检过程中的安全性。
根据输电线路结构及无人机设备结构特点,无人机与输电线路间的安全距离Ds可表示为

式中:I1、I2分别为输电线路两侧磁场不影响无人机进行作业的临界距离;I3、I4分别为输电线路两侧电场不影响无人机进行作业的临界距离;x1为预先规划航迹与无人机实际航迹间的误差距离;x2为风力造成的位置偏差距离;x3为测距仪的测量误差距离;x4为GPS 定位距离偏差;v为无人机飞行速度;t为无线通讯最大延时;a1为无人机机翼长度;a2为无人机机头与其主轴的距离;a3为无人机机尾与其主轴的距离;a4为无人机机载云台与无人机主轴的距离。
根据不同的输电线路电压等级,其磁场、电场强度影响距离也有所不同。而对于目前实际无人机巡检作业常用的小型无人机,在不同电压等级下设定的安全巡检距离如表1所示。
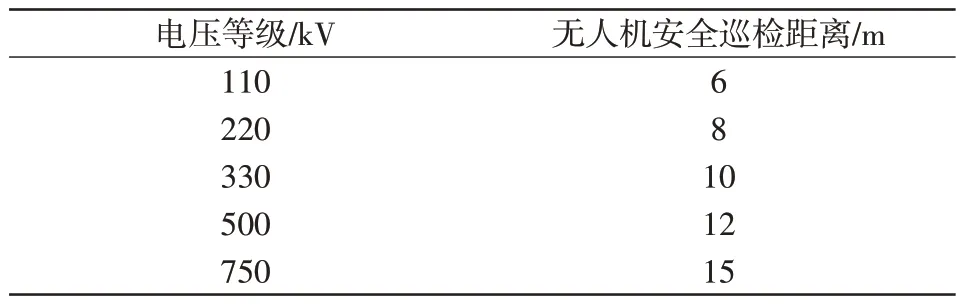
表1 电压等级与安全距离之间的关系Tab.1 Relationship between voltage level and safety distance
1.1 传统测距方法
传统的测距方法包括激光测距、超声波测距、红外测距、双目视觉测距技术等,但传统测距方法受限于设备成本、测量精度、无人机载荷和设备功耗,不适用于目前的输电线路巡检作业。因此目前在小型无人机线路巡检中常采用成本较低、测距原理简单的GPS 定位测距或激光测距方法实现无人机与线路间距的实时检测。
1.1.1 基于GPS 坐标转换方法
基于无人机巡检的杆塔GPS 坐标与无人机实时GPS坐标,可以得到无人机与当前巡检线路间的水平距离。GPS技术的测距方法虽然简单易行,但GPS在水平距离上仍存在一定误差,同时GPS在无人机的高程距离上无法进行精确定位,因此无法判断无人机与地面间的垂直距离。目前,GPS定位误差距离通常在2.5 m,对于常见的500 kV 和750 kV线路的巡检安全而言距离较大,相对误差在17%~21%,存在较高的撞线风险;在山区等GPS 信号较弱的地区,其测量误差会进一步扩大。因此,GPS测距法并不适用于小型无人机巡检,尤其是高压输电线路巡检。
1.1.2 基于激光扫描的测距方法
激光扫描的测距方法是通过无人机搭载的激光扫描仪等激光设备,对输电线路发射激光并接收反射光形成立体建模以进行实时测距。该方法可以对输电线路进行全面测量,如输电线路弧度、导线间距、导线净空距离等,便于无人机对线路状态进行全面分析。激光扫描测距方法虽然测得信息全面,且精度较高,但其需要在无人机上搭载大量设备,对无人机的载荷、能耗有很大要求,因此,基于激光扫描的测距方法常用于无人直升机巡检中。
1.2 单目视觉测距方法
针对上述传统测距方法存在的问题,本文采取测距精度误差相对较小,成本较低的单目视觉测距方法进行测距。
根据《架空输电线路杆塔结构设计技术规定》可确定杆塔实际高度,因此,通过无人机搭载的光学设备,可以对相邻的输电线路杆塔进行拍照,测量所拍摄图片中的杆塔间距,基于小孔成像原理即可得到无人机与输电线路间的水平距离。
无人机单目测距原理如图1 所示。其中,l为像A′、B′的像间距离;θ0为像A′、B′的成像夹角;θ为杆塔A、B在无人机光学中心处的夹角;α为无人机光学中心到杆塔B与线路AB间的夹角;ua、ub、va、vb分别为杆塔A、B 的物距和像距;L为输电线杆塔A 到杆塔B 的实际距离;x为无人机与输电线路间的水平间距。
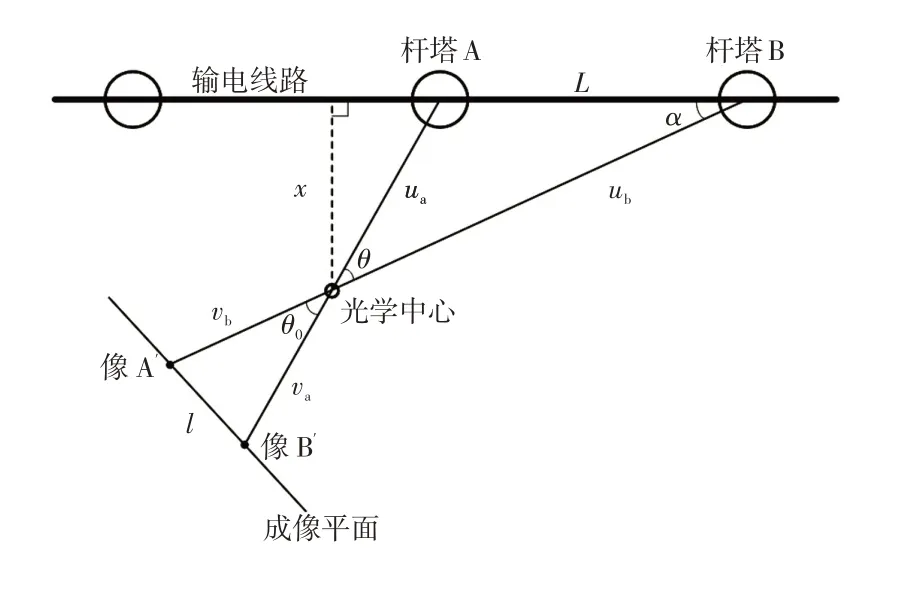
图1 单目测距原理Fig.1 Schematic of monocular ranging
假定杆塔高度为H,相机焦距为f,由无人机摄影的图像中获得杆塔的高度为ha、hb,则无人机与杆塔A、B间的物距分别为
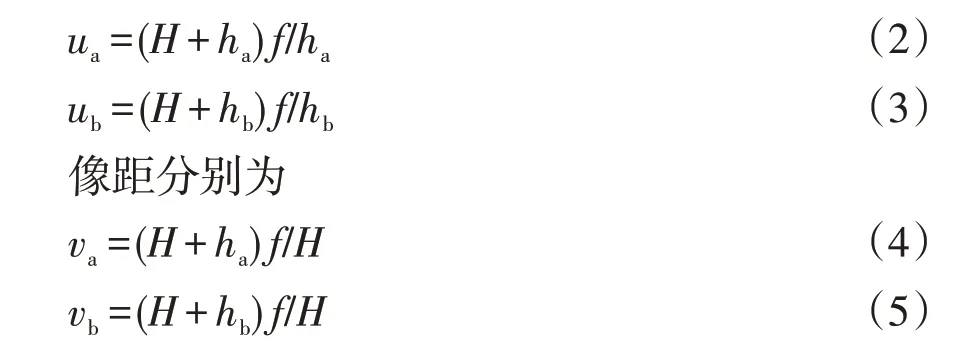
无人机离输电线路的距离x为

在无人机巡检系统中,通过单目视觉测距法测量得到无人机与杆塔和线路间距,与巡检线路电压等级对应的安全距离相比较,通过对巡检航迹的实时校正,使无人机巡检能够安全飞行。
2 无人机巡线航迹规划
在无人机巡检作业中,无人机轨迹规划是保证其巡线效率和巡检安全的一个重要问题。为了降低该问题的复杂性,本文将航迹规划分为全局静态航迹规划和局部动态航迹规划两部分进行分析。
2.1 全局静态航迹规划
全局静态航迹规划是指在无人机进行巡检前,根据巡检目标杆塔及线路,提前规划出的巡检路线。该航迹在规划时不会预测线路中可能出现的突发情况,因此仅考虑事先掌握的地理环境信息进行规划,即,仅需考虑巡检路线的距离而不需考虑实时性。
本文的无人机巡检全局静态航迹规划步骤如下:
步骤1按照所分布的巡检线路,确定无人机飞行区域、巡检顺序和无人机巡检起点和终点;
步骤2基于确定的飞行路线,获得相应区域内的地理环境信息,构建整体飞行环境;
步骤3结合无人机与飞行环境各因素的约束,在全局飞行环境中规划出最优飞行航迹。
2.2 局部动态航迹重规划
局部动态航迹规划是指在无人机巡检作业过程中,发生突发障碍或威胁的情况,例如飞鸟、树枝掉落和未知障碍物等事先无法预知的威胁,无人机根据规划的航迹飞行不能躲避,需要重新规划飞行路径。由于巡检作业中突发威胁是未知的,动态航迹规划相对全局航迹规划有更高的实时性,确保无人机在不偏离原有的计划航线的同时,避开突发威胁。
无人机可能遭遇的突发威胁种类繁多且发生机理复杂,为简化分析,本文将突发威胁分为两种,一种为规划全局航迹时未发现的静态突发威胁,例如高大树木、预先没有发现的障碍等;另一种是动态突发威胁,例如飞鸟、其他飞行无人机等。
2.2.1 静态突发威胁航迹规划
对于静态威胁,其特点为障碍物阻挡的区域固定,因此可根据无人机当前位置与故障区域划定重规划区域,在区域内重新规划巡检路线规避固定障碍物。因此可采用双向RRT算法进行重规划。
静态突发威胁航迹重规划如图2 所示,其中,实心圆表示突发静态威胁范围;start′为无人机当前位置;goal′为无人机躲避威胁后的位置。
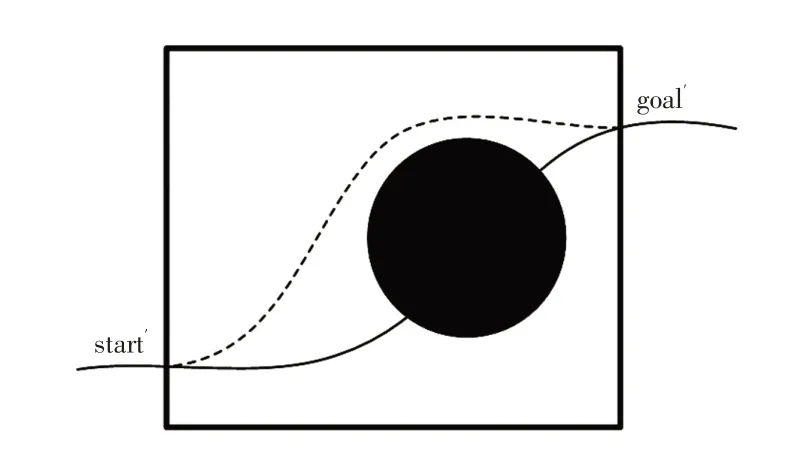
图2 静态突发威胁示意Fig.2 Schematic of static emergent threat
无人机静态突发威胁航迹规划步骤如下。
步骤1通过对无人机当前位置和静态威胁范围的分析,确定航迹重规划区域。
步骤2确定重规划区域起点start′和终止点goal′。
步骤3建立2 棵搜索树,分别以start′和goal′作为2棵树的根节点。
步骤4扩展2 棵搜索树。首先扩展,以goal′作为随机节点,在中选取距离goal′最近的叶节点xnearest,并向其扩展至无法扩展;若扩展失败,则在重规划区域选取1 个随机点xrand进行扩展。的扩展方法与相同,但的最新节点作为叶节点进行扩展,若沿该方向扩展失败则在重规划区域内选取1 个随机点xrand进行扩展。完成扩展之后,互换,并进行新一轮扩展,直到叶节点相互连接。在每次扩展中,均对扩展节点进行连接,若避开威胁区域则说明已对接完成。
步骤5连接在一起后,回溯生成航迹。
步骤6对航迹进行平滑处理。
步骤7无人机根据重规划的航迹躲避障碍物后,回到全局静态航迹上继续巡检任务。
2.2.2 动态突发威胁航迹规划
对于第2.2.1节叙述的RRT算法,由于其生成叶节点时为随机生成,具有很大随机性,不适用于躲避威胁位置实时变化的动态突发威胁情况。因此在RRT 算法中的叶节点生成策略中考虑运动轨迹方程,根据无人机与动态威胁的运动轨迹规划路径,并以规避代价选取最优路径解决这种随机性问题。
由于动态突发威胁航迹规划问题较为复杂,不同威胁在运动速度、体积上差异较大,不利于快速规划,因此本文做出以下假设:
(1)在无人机巡检作业中,由于无人机体积较小,所以将其简化成质点进行轨迹分析;
(2)无人机飞行速度保持恒定;
(3)本文考虑的动态突发威胁同样为小型物体,因此将其简化为质点进行分析;
(4)对于突发威胁,仅考虑其做匀速直线运动。
在RRT算法的基础上考虑运动轨迹方程,建立以重规划区域的起始点为树的根节点。对于叶节点的生成,以重规划区域的目标点作为xrand,且扩展方式与RRT算法相同,若扩展成功则与静态突发威胁中扩展方式一致;若扩展失败,则通过运动轨迹方程来确定xrand的选取。
在无人机轨迹模型中,其水平方向上的运动轨迹方程可表示为
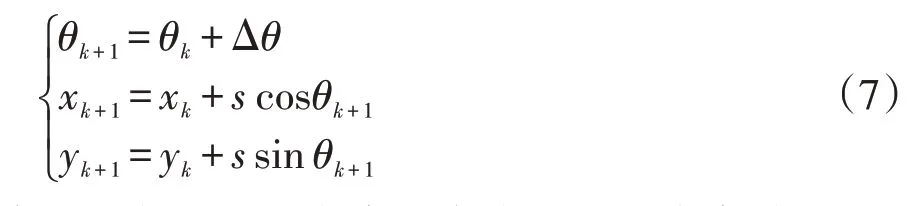
式中:θk为无人机在水平方向上的飞行航向;θk+1为无人机在下一目标点水平方向上的飞行航向;(xk,yk)和(xk+1,yk+1)分别为当前航路点和下一航路点的横、纵坐标;s为航迹段长度。
在无人机垂直方向的运动轨迹方程中,根据当前航路点与目标点的连线可得垂直坐标距离的变化为
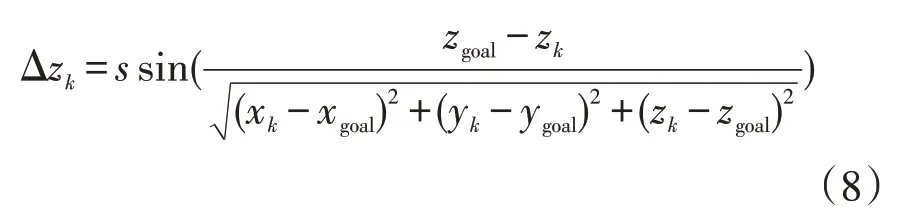
式中:zk、zk+1分别为当前航路点和下一目标点的垂直坐标;xgoal、ygoal和zgoal分别为目标点的横坐标、纵坐标和垂直坐标。
动态威胁的运动方程可表示为
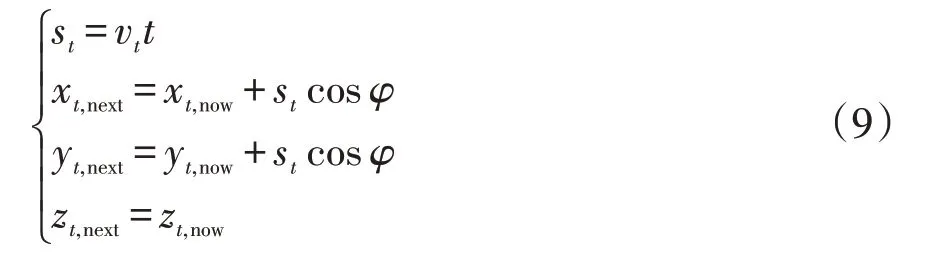
式中:(xt,now,yt,now,zt,now)为探测到的威胁当前位置;φ为威胁飞行的水平方向的飞行航向;t为无人机采样间隔;vt为动态威胁在采用间隔t内的行动速度;st为动态威胁在采用间隔t内的飞行距离;(xt,next,yt,next,zt,next)为威胁的下一时刻预计位置坐标。
根据动态威胁影响范围及移动方向,无人机可以在水平方向及垂直方向进行规避,为了选取最优规避路径,设定代价函数F确定每个节点的移动代价来选取最优节点,即

本文的无人机动态突发威胁航迹规划步骤如下。
步骤1通过对无人机当前位置、动态威胁范围和速度的分析,确定航迹重规划区域。
步骤2选取目标节点作为随机节点xrand,并沿该方向扩展搜索树直到扩展失败;若沿目标节点方向扩展失败,则根据无人机运动轨迹方程来确定xrand,通过改变Δθ的取值,获取能够规避威胁的节点xrand。
步骤3根据获取的新节点xrand扩展随机树。根据无人机在水平及垂直方向上的运动轨迹方程生成下一节点,计算其移动代价F,选取移动代价最小的节点作为下一个航迹点。
步骤4连接所有航迹点并进行平滑处理,得到动态突发威胁的重规划航迹。
3 无人机自主巡检系统框架
通过无人机巡线轨迹动态规划,可以保证无人机在巡检作业中的安全性,为保证巡线结果有效且正常上报给上层系统,实现全过程自主巡检,还需建立对应的自动化流程框架。无人机自主巡检流程如图3所示,其具体过程如下。
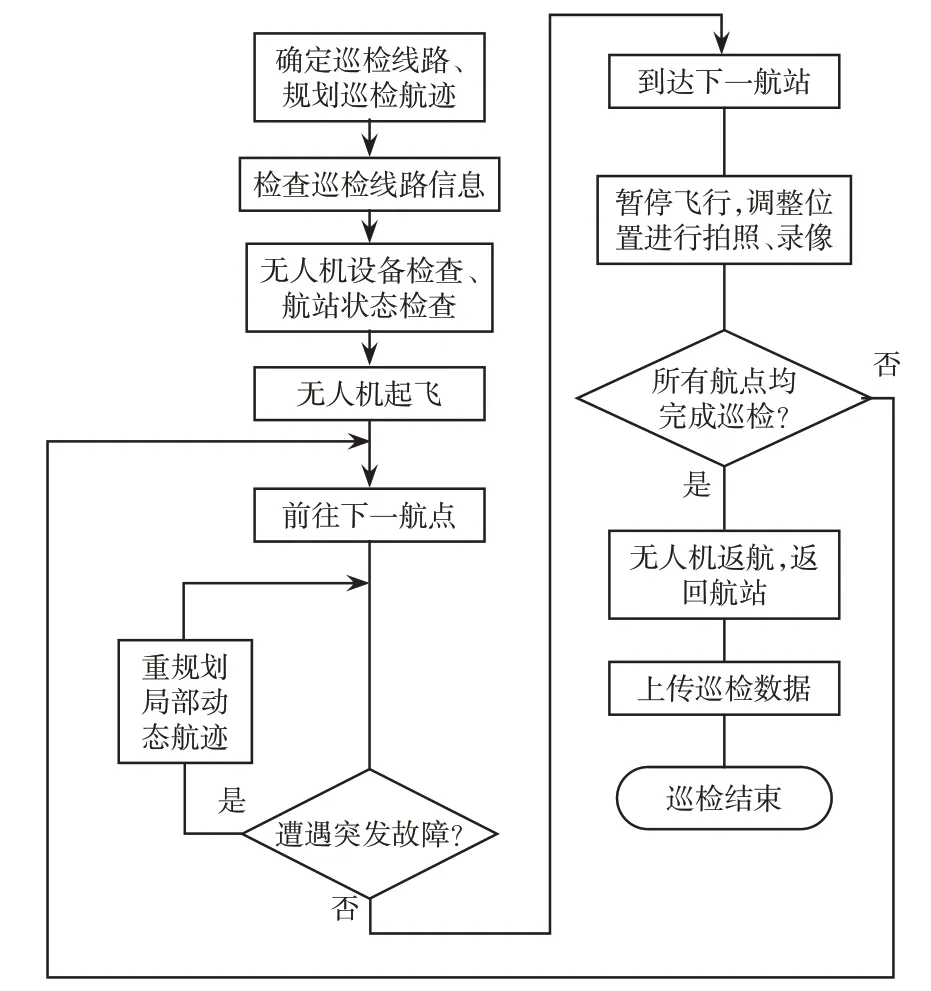
图3 无人机自主巡检流程Fig.3 Flow chart of drone autonomous inspection
(1)控制系统接收上层巡检线路。
(2)检查巡检线路信息,确认航线是否过近或过远;是否包含禁飞区;预估航线总距离、时间和所需电量;是否与其他无人机执行的航线重叠等。
(3)形成航线命令,上传到无人机飞控
(4)检查航站状态、外界气象状态和风力风向状态等。
(5)检查无人机状态,检查各传感器、动力系统、定位状态及无人机剩余电量等。
(6)无人机起飞,到达自定高度后开始执行巡检航线。
(7)到达航点,暂停飞行,调整云台角度、镜头参数并拍照,然后继续飞行。
(8)所有航线执行完毕后准备返航。
(9)接收到航站完毕信号,到达航站上方降落
(10)降落完成,从云台相机中下载拍摄的照片,巡检文件航点对照表。
(11)作业成果上传
(12)全流程结束。
4 无人机输电线路巡检系统应用
基于大疆M300型无人机平台研发的小型多旋翼无人机自主巡检系统已于唐山地区电网进行实验与调试,输电线路的巡检效率和无人机巡检系统可靠性得到了明显的改善。
无人机自主巡检体系的结构如图4所示,由图4可知,该系统包括管控中心、智能航空站及其布置的无人机构成。管控中心通过同时接收、协调、反馈各无人机之间的信息,以及多航线任务规划、编队、任务分配等子系统协调配合,保证各无人机之间的任务分配合理、高效,通过优化航线实现无人机以最短时间完成目标任务;通过集控飞行设备,可实现无人机超视距集控飞行和多智能航空站无人值守作业等。管控中心可同时控制多台航空站,多台航空站分别执行不同的命令,显示图像可在不同无人机之间进行切换。管控中心采用“自主巡检+手动飞行”控制模式,对无人机巡检进行全过程管理,及时应对各类异常报警和故障情况,保障线路和无人机设备的安全。
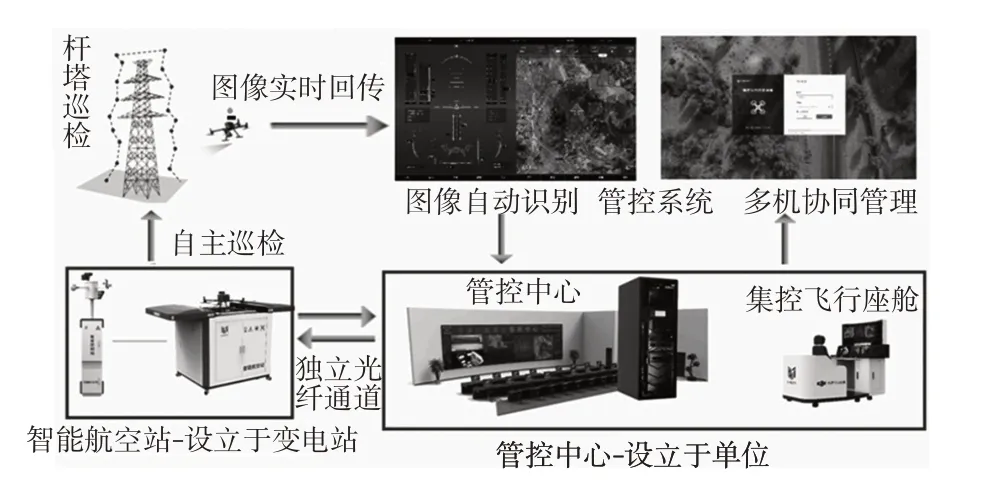
图4 无人机输电线路巡检系统Fig.4 Drone inspection system for transmission line
根据输电线路重要程度、负荷量等多种因素的考量,部署多个智能航空站,扩大无人机可巡检范围,为目标区域规划合理航线提供支撑。唐山某地区航空站布局示意如图5所示。
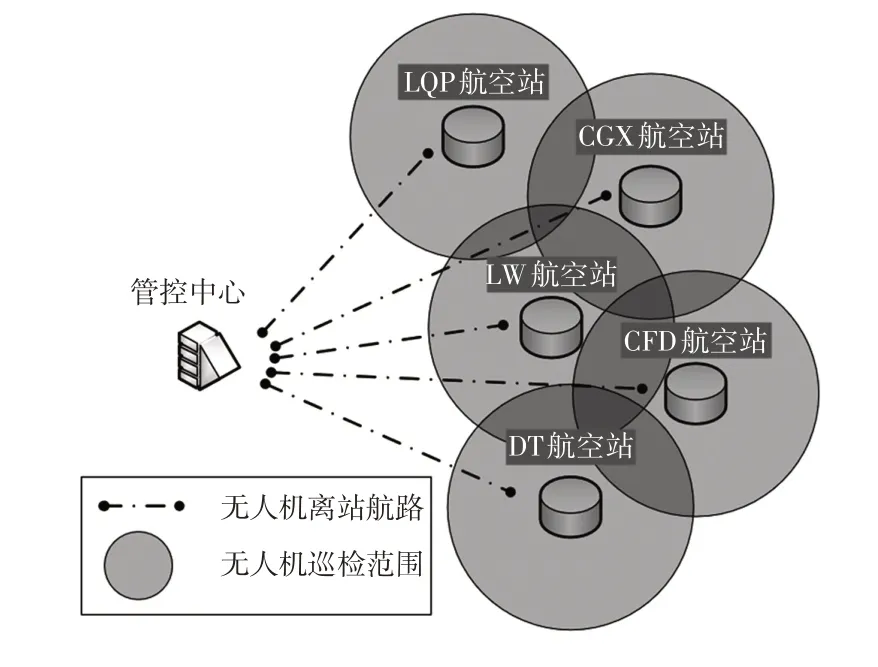
图5 唐山某地区航空站覆盖区域示意Fig.5 Coverage area by Tangshan area air terminal
航空站布置在变电站内不影响变电运行的角落或边缘位置,与变电站距离适中,便于取电,同时航空站上方无线路、设备等遮挡物。航线规划时,无人机起飞后第一时间驶离变电站,以免相互影响,发生信号干扰,保证设备安全,然后按照航线进行自主巡检。
在进行自主巡线时,可依托航空站更换无人机的搭载云台,实现不同功能。搭载红外光云台可对杆塔温度进行监控;搭载激光设备可对杆塔及通道进行点云数据建模。形成以无人机为平台,红外光、激光、可见光多光一体的多维度巡检方案,目标巡检设备及巡检方式如图6、7所示。
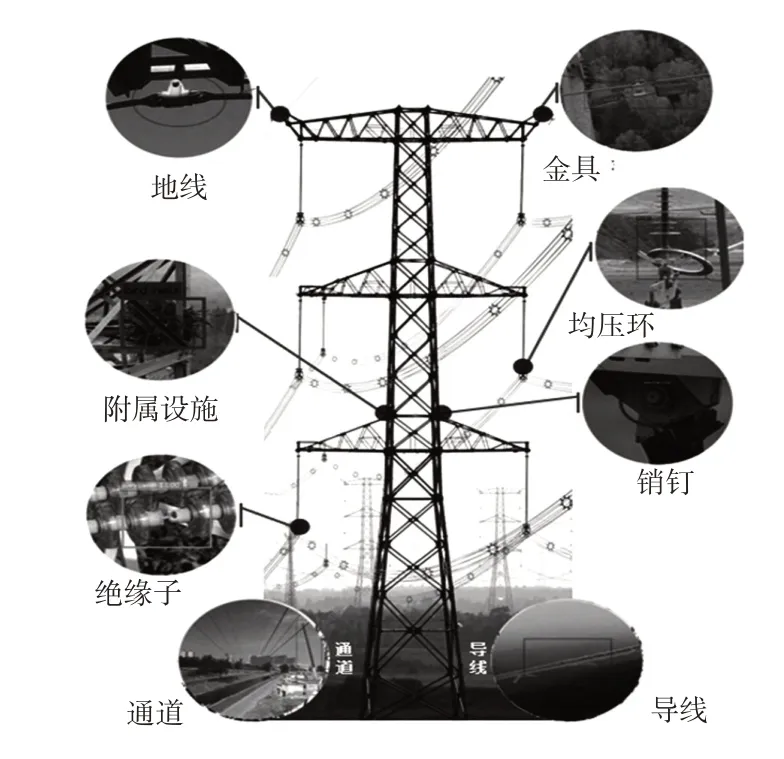
图6 无人机多维度巡检方案Fig.6 Drone multi-dimensional inspection program
多维度巡检方案有效地对杆塔存在的各类常见故障进行分析判断。通过对同一位置的多次复拍,自动上传至管控中心数据库可进行历史图像对比,更好地了解设备变化、设备隐患形成的时间点和形成原因,帮助巡检人员制定检修方案。
无人机也可改为人工手动控制,对无人机自主巡检过程中发现的异常设备进行人工判断,解决人工巡检很难发现高空隐蔽缺陷和各种通道隐患问题。通过对控制中心进行现场设备状态、检修策略等信息的及时掌握,对输电线路状态进行有效评价,并与现场图像视频相结合等手段,精准定位作业现场和风险点位,实现对所辖范围内设备和通道运行状态的综合管理,从传统、简单的业务执行工作模式转变为“实时分析—判定缺陷—检修策略”的一岗多能的工作模式。
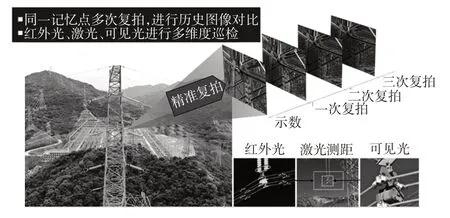
图7 多时间点杆塔图像的对比Fig.7 Comparison among multi-point-in-time pole tower images
通过无人机自主巡检作业替代人工间断零散的作业模式,基于智能管控平台进行智能识别,彻底替代人工巡检模式,实现全天候可持续性作业,单次连续巡检可达8 架次,连续巡检时长可达4 h以上,并实现以航空站为中心,覆盖直径为14 km的巡检面;提高了设备抗风险能力,较以往巡检效率提升了2 倍,同时大大缩短了巡视周期,由原来的每月1 次缩短为每7 d 一次,针对重点线路巡视周期可缩短为1 d。由于巡线航迹误差精确至米,故规避突发故障百余次,有效提高巡线安全性;同时精细化自主巡检可利用高空视角更好地发现设备隐患,故障发现率提高100%,确保及时处理,保障线路的安全运行。
不同巡线方式的维护成本及巡检成本分析如表2和表3所示。其中,采用固定翼无人机巡线,每日可巡检距离最高且每公里平均成本最低,但因固定翼无人机无法对线路进行精确诊断,容易忽视高空隐蔽缺陷,不适用于日常巡检;而小型旋翼无人机相对传统人工巡线方式,可在平原、丘陵和山地区域作业,降低巡线成本32.11%、41.75%和54.30%,远低于人工巡线成本,且提高了巡线效率;相对中型旋翼无人机降低9.34%、9.17%和23.56%,且日常维护成本更低。
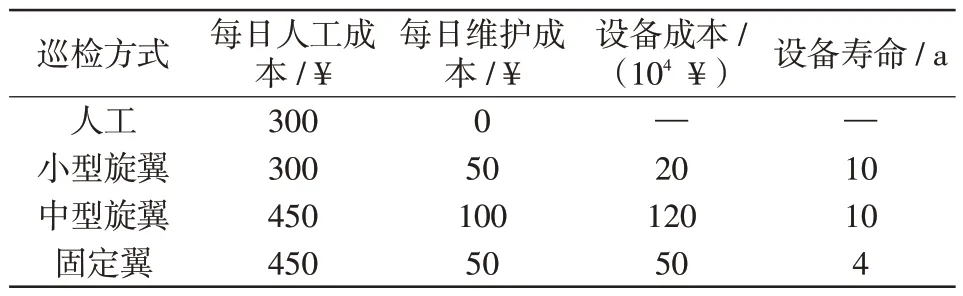
表2 不同巡线方式维护成本对比Tab.2 Comparison of maintenance cost among different inspection methods
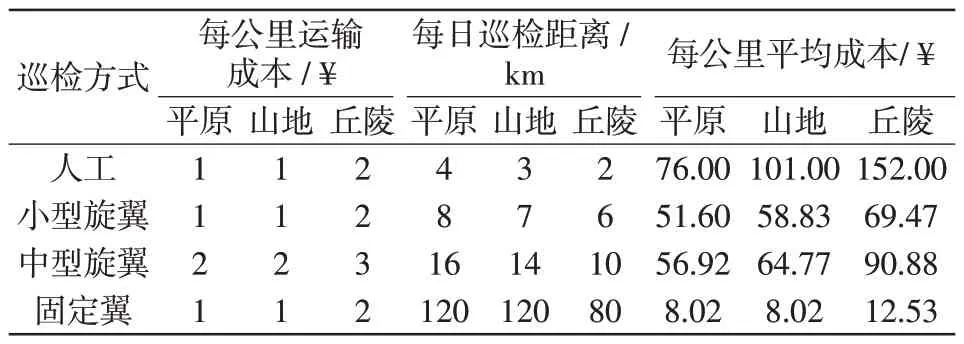
表3 不同巡线方式巡检成本对比Tab.3 Comparison of patrol cost among different inspection methods
5 结语
本文针对现有小型无人机自主巡线技术的缺点与不足,提出一种基于动态航迹规划的无人机输电线路自主巡检方法,通过规划全局静态航迹和局部动态航迹,并引入改进双向快速RRT算法进行航迹重规划,提高了无人机自主巡检过程中的安全性。同时,将多机协同、无人机多维度自主巡检、图像智能识别等智能化作业手段进行应用,改变了传统人工无人机巡检模式,利用管控中心的图像实时回传和智能识别技术,对巡检信息实时处理、智能甄别,及时发现输电线路缺陷和隐患,缩短人工巡视时间,提高巡检效率。通过应用实践,证明巡检系统能在保证输电线路巡检作业安全性的前提下,提高线路巡检精度、效率并有效降低巡检成本。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
智慧电力(2022年1期)2022-03-02
科技研究·理论版(2021年4期)2021-09-10
雷达科学与技术(2020年4期)2020-09-11
电子制作(2019年19期)2019-11-23
电子制作(2019年24期)2019-02-23
源流(2018年6期)2018-12-03
无人机(2018年1期)2018-07-05