自动化集装箱码头港外集卡提送箱交互作业模式
2022-11-01 05:35:00吴邵强彭骏骏
水运工程 2022年10期
吴邵强,梁 浩,彭骏骏
(中交第四航务工程勘察设计院有限公司,广东 广州 510290)
公路集疏运是集装箱港口集疏运系统的重要组成部分,它主要依赖港外集卡的公路运输实现集装箱在港口所在地腹地的集散。港外集卡进入集装箱港区后,须通过与堆场装卸设备间的交互作业完成提箱或送箱,该作业是集装箱码头主要装卸生产环节之一。在自动化集装箱码头,为降低港内无人驾驶车辆对进港有人驾驶集卡的安全风险,通常会采取强制隔离措施(如设置物理隔离围网、安全门禁等)对港外车辆的运行范围进行管控,以避免两类车辆运行轨迹出现空间交叉[1]。如何在运行区域严格受限的情况下实施港外集卡与堆场装卸设备的交互作业,一直以来都是集装箱自动化装卸工艺系统设计的重难点之一。港外集卡进港提送箱交互作业模式的选择和工艺方案设计是否合理对集装箱自动化装卸系统的运行效率和能耗水平都会产生一定影响。
本文在分析目前自动化集装箱码头常用港外集卡提送箱交互作业模式基础上,依托广州港南沙自动化集装箱码头和钦州港自动化集装箱码头,结合各自工程特点,因地制宜地提出“边装卸集中交互”和“边装卸U形通道交互”两种新型港外集卡提送箱作业工艺模式,并对不同模式下装卸工艺平面布置和流程设计要点进行详细阐述,可为具有类似工程的设计提供参考。
1 自动化集装箱码头港外集卡提送箱交互作业模式现状
目前,自动化集装箱码头中港外集卡提送箱常见交互作业模式主要包括箱区端部交互作业(简称“端装卸交互作业”)和箱区侧边交互作业(简称“边装卸交互作业”)两种。
1.1 箱区端部交互作业模式
港外集卡在自动化集装箱箱区端部与堆场装卸设备交互,完成提送箱作业。该模式常见于自动化堆场采用垂直布置形式的全自动化集装箱装卸工艺系统,如青岛前湾和上海洋山自动化集装箱码头[2]。
自动化集装箱堆场各箱区陆侧端部设港外集卡专用交互作业区,内设一定数量的集卡交互作业车位。自动化箱区与交互作业区之间采用围网隔离,港外集卡运行范围被限制在自动化集装箱堆场后方的港区非自动化区域内。各自动化箱区陆侧端配置1台自动化集装箱轨道龙门吊,专门用于与港外集卡进行交互作业。港外集卡进港后,行驶至目标箱所在箱区陆侧交互作业,倒车进入指定交互作业车位内,并完成与轨道龙门吊间的交互作业[3]。该作业模式典型工艺平面布置及断面见图1。
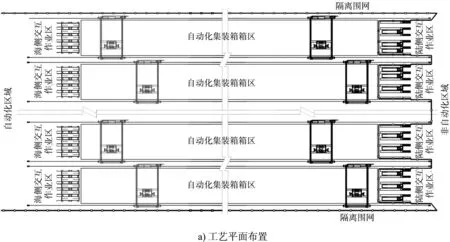
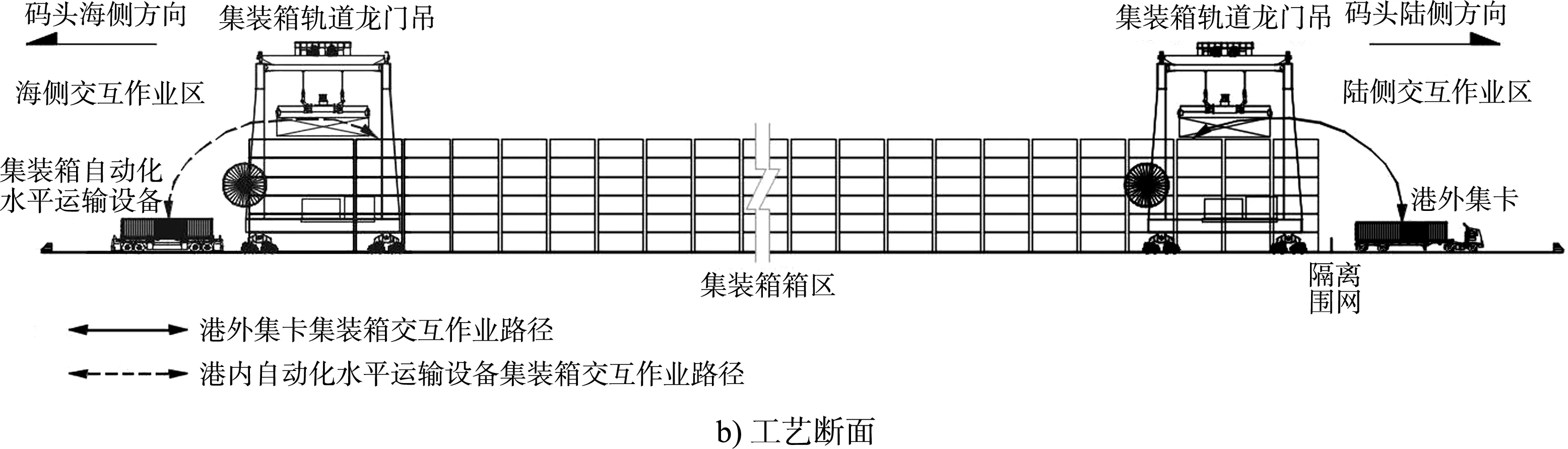
图1 端装卸交互作业模式
该模式工艺平面布置和装卸作业具有以下特点:1)单箱区出箱(或收箱)点受陆侧交互作业区港外集卡候工车位布置数量限制,一般为3~5个;2)陆侧端集装箱轨道龙门吊须承担集装箱在箱区内部堆码垛作业和长距离水平运输作业;3)港外集卡须倒车进入候工车位,以免出现轨道龙门吊带箱越过港外集卡驾驶室顶部的现象和安全隐患。
1.2 边装卸交互作业模式
港外集卡在自动化集装箱箱区侧边与堆场装卸设备交互,完成提送箱作业。该作业模式常见于自动化堆场采用平行布置形式的全自动化集装箱码头,如国内的天津北疆C段和日本名古屋自动化集装箱码头。
该作业模式不设置专用的港外集卡交互作业区,港外集卡进港后须行驶到自动化集装箱堆场目标箱位所在的箱区侧边,完成与堆场自动化装卸设备的交互作业,任何一个箱区贝位都可成为交互作业点。自动化箱区装卸作业一般采用自动化悬臂式轨道龙门吊或自动化轮胎龙门吊作业。其中,自动化双悬臂轨道龙门吊具备利用双侧悬臂分别与港外集卡和港内自动化水平运输设备进行交互作业,实现两类车辆在箱区内部隔离分流的优势,因此双悬臂轨道龙门吊是边装卸交互作业模式下最常用的自动化堆场装卸设备。自动化集装箱堆场采用双悬臂轨道龙门吊时的边装卸交互作业模式典型工艺平面布置及断面见图2。
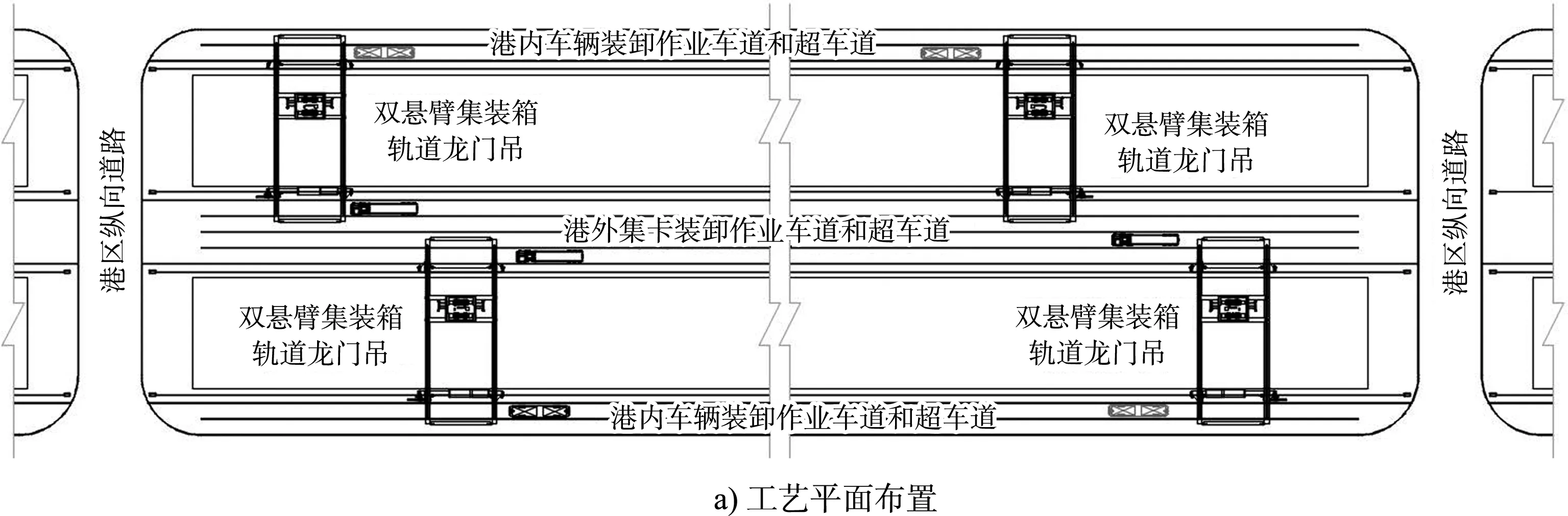

图2 双悬臂集装箱轨道龙门吊的边装卸交互作业模式
该模式工艺平面布置和装卸作业具有以下特点:1)单箱区出箱(或收箱)点多,任何一个箱区贝位均可成为交互作业点;2)集装箱轨道龙门吊不需要承担集装箱在箱区内长距离水平运输作业,单箱交互作业所需设备能耗低;3)港外集卡与港内车辆运行轨迹存在空间交叉,交通组织复杂。在集装箱全自动化装卸系统中,须对港内外车辆交通隔离分流进行重点专项设计。
2 自动化集装箱码头港外集卡提送箱新型交互作业模式
2.1 广州港南沙自动化集装箱码头
2.1.1工程概况及特点
广州港南沙自动化集装箱码头,新建4个5万~10万吨级集装箱海轮泊位和12个2 000吨级内河驳船泊位,码头预测集装箱年吞吐量480万TEU。主要工程特点包括[4]:1)海轮码头与驳船码头布置在非直线岸线上,整体呈侧面相邻形态;2)集装箱集疏运以“江海联运”为主,公路集疏运为辅。公路集疏运集装箱运量较低,仅约60万TEU/a。
为适应集装箱在港内的主要工艺流向为平行于海轮码头岸线的工程特点[5],码头采用了“自动化堆场平行布置+自动化水平运输采用智能导引车(IGV)”的全自动化总体技术路线。
2.1.2港外集卡交互作业工艺方案设计
广州港南沙自动化集装箱码头采用平行布置,若港外集卡提送箱采用常规边装卸交互作业模式,将存在以下问题:1)港内外车辆运行轨迹无法实现完全意义上的空间隔离,港外集卡对集装箱自动化装卸系统运行的干扰和自动化水平运输设备对港外集卡的安全威胁都无法完全规避;2)港区自动化区域内部交通组织困难,车辆运行安全风险较大。
综合上述因素,在充分利用公路集疏运集装箱年运量低的特点基础上,提出一种“边装卸集中交互”的新型港外集卡提送箱工艺模式。该作业模式工艺平面布置及断面见图3。

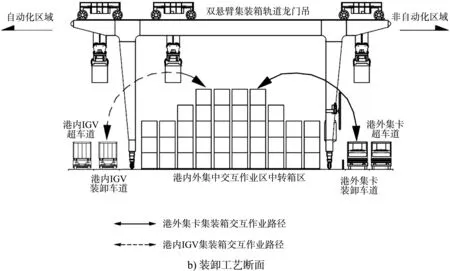
图3 边装卸集中交互作业模式
自动化集装箱堆场后方设置独立的港内外集中交互作业区,内设1条平行布置的中转箱区,箱区内部采用具备自动化和远程操控自由切换功能的自动化双悬臂集装箱轨道龙门吊作业,轨道吊陆侧悬臂下设置港外集卡专用交互作业车道和超车道。陆侧轨与港外集卡交互作业车道之间采用围网隔离,港外集卡运行范围被限制在轨道吊陆侧悬臂下的非自动化区域内。港外集卡进港后,行驶到中转箱区侧边、双悬臂轨道龙门吊陆侧悬臂下方的目标箱位贝位处,等待和完成与双悬臂轨道龙门吊的交互作业。
结合码头陆域条件限制,港内外集中交互作业区中转箱区设计长度约1 212 m,含地面箱位1 870 TEU,最大堆箱容量9 350 TEU(最大堆箱高度为5层),箱区内采用重(冷藏)、空箱混堆。根据公路集疏运集装箱运量和轨道龙门吊的作业效率测算,中转箱区双悬臂轨道龙门吊采用近期配3台、远期增配3台的分期配置策略,满足公路集疏运集装箱量逐年上升的需求。
在港外集卡提送箱业务中,客户通过业务预约系统提前向港口报备目标箱信息、集卡信息及提送时间等重要资料,港口收到预约信息后将根据预约时间制定高效的目标箱港内转运计划和交互作业计划。
该模式在充分利用码头公路集疏运集装箱运量低、集中交互作业中转堆场规模不大等特点的基础上,通过设置港外集中交互作业区,将原本应在自动化箱区侧边进行的交互作业转移到交互作业区中转箱区侧边,用物理围网实现了港外集卡与港内自动化水平运输设备间交通的空间隔离,港外集卡进港后的运行和交互作业过程不与港区自动化水平运输设备产生任何交叉,系统安全性能好。同时该模式还具备港外集卡边装卸交互作业模式的所有优点,如自动化箱区出箱(收箱)点多、港外集卡交互作业周转效率高、单箱交互作业循环平均设备能耗低等。
2.2 钦州港自动化集装箱码头
2.2.1工程概况及特点
钦州港自动化集装箱码头,建设4个10万吨级集装箱泊位,码头预测集装箱年吞吐量260万TEU。主要工程特点包括:1)码头岸线布局形态常规,集装箱泊位连续布置在同一直线岸线上。2)港内集装箱集疏运以公路集疏运为主,水路中转集疏运为辅。公路集疏运集装箱运量占码头总吞吐量的比例为60%,同时还存在部分铁路集疏运集装箱。集装箱在港内的主要转运流向呈现出垂直于码头岸线的状态。3)码头陆域纵深大,为807.5~1 007.0 m。
为适应集装箱在港内主要转运流为垂直于码头岸线的工程特点,码头确立了“自动化堆场垂直布置+自动化水平运输采用智能导引车(IGV)”的全自动化总体技术路线,垂直布置箱区长度约536 m(可布置85个20 ft集装箱箱位)。
2.2.2港外集卡交互作业工艺方案设计
钦州港自动化集装箱码头具备陆域纵深大、垂直布置箱区长度大的工程特点,若港外集卡提送箱采用常规端装卸交互作业模式,将会存在以下问题:
1)单箱交互作业循环平均设备能耗大,自动化箱区装卸设备带箱行走的距离更大,将对该模式中单箱交互作业循环下设备平均能耗本身就高的缺点进一步放大;2)箱区长度超过自动化装卸机械设备的经济运距,将对交互作业生产效率产生不利影响;3)出箱(收箱)点少,影响港外集卡提送箱作业的周转效率。
综合考虑上述因素,结合港外集卡与港内自动化水平运输设备需要隔离分流的基本要求,提出“边装卸U形通道交互”的新型港外集卡提送箱工艺模式。该作业模式工艺平面布置及断面见图4。


图4 边装卸U形通道交互作业模式
垂直布置自动化集装箱箱区内设置多条可供港外集卡通行的U形通道,通道与自动化集装箱堆场后方的非自动化区域连通,与港区自动化区域之间采用围网隔离。港外集卡在箱区间的运行范围被限制在U形通道之内。
自动化箱区内部装卸作业采用具备自动化和远程操控自由切换功能的双悬臂集装箱轨道龙门吊。港外集卡通过目标箱所在自动化箱区的U形隔离通道进入到箱区内部,在箱区侧边目标箱所在贝位处等待与自动化双悬臂轨道吊交互作业,自动化双悬臂轨道吊根据系统指令完成集装箱在自动化箱区内的翻倒、吊放和与港外集卡远程操控交互作业(即装卸车)。港外集卡完成提送箱交互作业后,沿U形通道驶离自动化箱区,返回非自动化区域。
该模式针对码头陆域纵深大、垂直自动化集装箱箱区长的特点,将港外集卡边装卸交互作业模式应用到了堆场采用垂直布置形式的全自动集装箱装卸工艺系统中。港外集卡进入自动化箱区,在箱区侧边完成与堆场自动化装卸设备的提送箱交互作业,具备传统边装卸交互作业模式的所有优点,如自动化箱区出箱(收箱)点多、港外集卡交互作业周转效率高、单箱交互作业循环平均设备能耗低等。U形隔离通道对港外集卡的运行区域和路径进行了限制,能满足港外车辆与自动化水平运输设备交通隔离分流的基本要求。该模式对于陆域纵深大、公路集疏运集装箱运量大等工程特点的自动化集装箱码头有良好的适用性。
3 结语
1)在港内外车辆无法实现安全混行前,港外集卡提送箱交互作业模式选择和方案设计是集装箱自动化装卸工艺系统设计无法回避的重难点问题之一。港外集卡提送箱交互作业应充分结合自动化集装箱码头工程及总体技术路线特点,因地制宜地提出合理的解决方案。
2)港外集卡“边装卸集中交互”作业模式在公路集疏运集装箱运量规模小、堆场采用平行布置的全自动化集装箱装卸工艺系统中具备良好的适应性;港外集卡“边装卸U形通道交互”作业模式在公路集疏运集装箱运量规模大、陆域纵深大、堆场采用平行布置的全自动化集装箱装卸工艺系统中具备良好的适用性。
3)以上两种港外集卡提送箱新型交互作业模式,均具备实现港内外车辆运行轨迹空间隔离、提升自动化系统运行效率、降低生产作业设备能耗等优点。
猜你喜欢
计算机仿真(2023年2期)2023-03-29 13:38:36
物流工程与管理(2022年6期)2022-07-08 09:53:30
集装箱化(2020年7期)2020-06-20 00:09:15
世界海运(2019年5期)2019-05-27 06:38:16
天津科技(2018年12期)2019-01-02 10:47:14
水运管理(2016年9期)2016-11-08 11:32:17
集装箱化(2016年8期)2016-10-20 10:56:16
设备管理与维修(2016年6期)2016-03-16 02:21:57
铁道运营技术(2015年3期)2015-12-23 09:27:16
石油化工建设(2015年6期)2015-12-01 04:17:27