
基于马尔可夫链模型的机械式停车设备安全评估*
2022-10-31 09:09陈梁胜赵攸乐
起重运输机械 2022年18期
陈梁胜 邱 郡 赵攸乐
上海市特种设备监督检验技术研究院 上海 200062
0 引言
截至2019年末,据统计中国汽车保有量达2.7亿辆,根据车位比的国际标准,国内汽车停车位总需要量约3.66亿,因此,停车相关的静态交通产业具有广阔的市场前景。机械式停车设备因其占地空间小、存车量大的优势而得到快速发展[1]。
机械式停车设备的故障易导致车辆损伤甚至是人员伤亡,与社会民生息息相关,因此引起了社会的广泛关注[2],其安全性也成为当前研究的热点问题。尤志轩[3]分析了升降横移类机械式停车设备在存取车过程中的运行危险,并提出改进措施;赵耀伟[4]采用有限元软件对升降横移类机械式停车设备的结构进行了力学分析和优化设计;覃海标[5]对停车设备联轴器螺栓进行了实效分析;邱伟星[6]分析了升降横移类机械式停车设备载车板坠落的事故原因,提供了改进措施及建议。而对于机械式停车设备整体的安全状态尚未提出系统完善的评估方法。
文中以垂直升降类机械式停车设备为研究对象,从金属结构、机构、主要零部件、电气系统、安全保护装置5个方面进行风险分析和综合评价,建立基于马尔可夫链模型(Markov Chain Model)的机械式停车设备安全评估方法。
1 马尔可夫链模型简述
马尔可夫链(Markov Chain)是数学中具有马尔可夫性质的离散时间随机过程。其特点为:1)系统在每个时期所处的状态是随机的;2)从一时期到下时期的状态按一定概率转移;3)下时期状态只取决于本时期状态和转移概率(无后效性)。
设有随机过程{Xn,n∈T},若对于任意的n∈T整数和任意的i0,i1,…in,条件概率满足

则 称{Xn,n∈T}为马尔可夫链(Markov Chain)。
机械式停车设备是一个机电一体化系统,每一个部件的运行状态只与其前一状态相关,是一个典型的马尔可夫链过程。
2 危险识别
要对一个系统进行安全评估,首要工作是对其包含的危险源进行识别。现有的机械式停车设备品种繁多,其中垂直升降类机械式停车设备具有智能化程度高、可停车层数高、运行机构复杂等特点,是机械式停车设备中危险源最复杂的一个品种,在安全评估中也最具代表性。
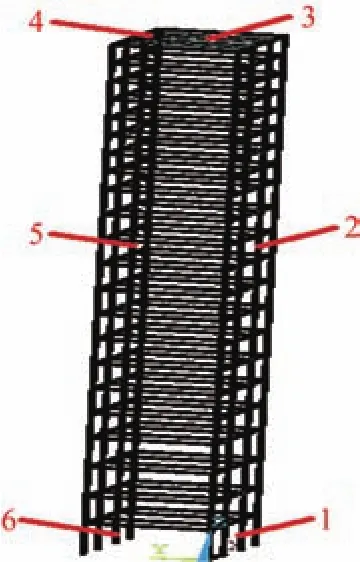
本文以垂直升降类机械式停车设备为研究对象(如图1所示),将整个系统划分为不同评估单元进行危险源识别工作(见表1)。
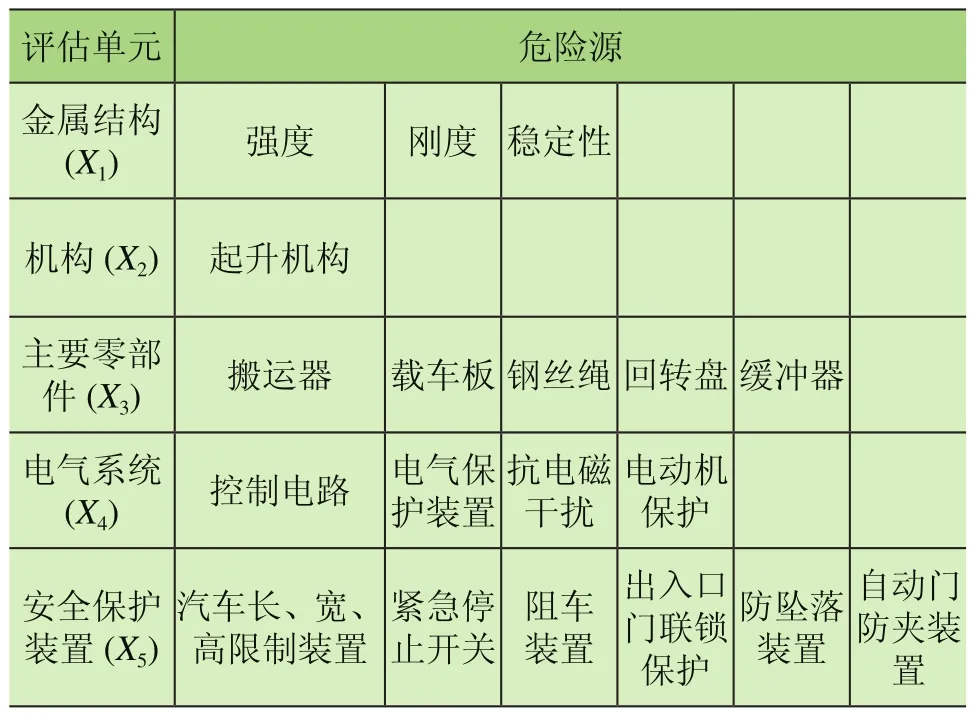
表1 危险识别

图1 垂直升降类机械式停车设备
机械式停车设备被划分为5个评估单元,分别是金属结构、机构、主要零部件、电气系统、安全保护装置,相应地对应于马尔可夫链模型中的[X1,X2,X3,X4,X5]。
对于一阶马尔可夫链模型,某变量N次观测序列的联合概率分布为[7]

以P=[pij]表示转移概率矩阵。其中pij=P{Xn+1=j∣Xn=i}是一步转移概率,且∑pij= 1。
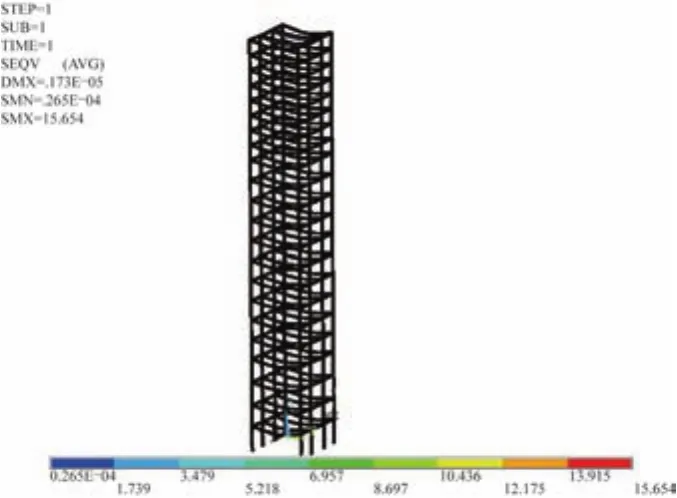
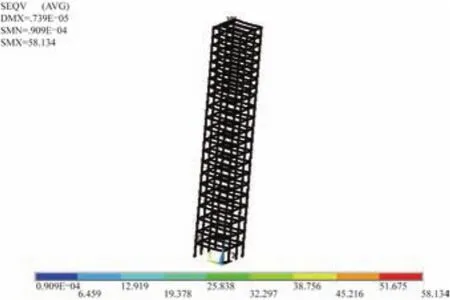
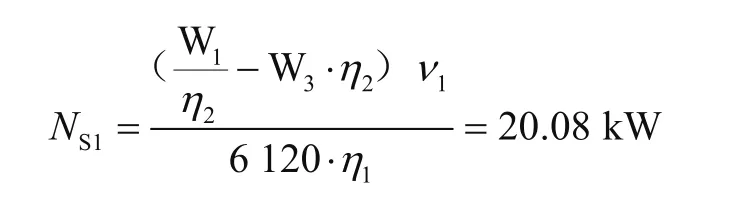
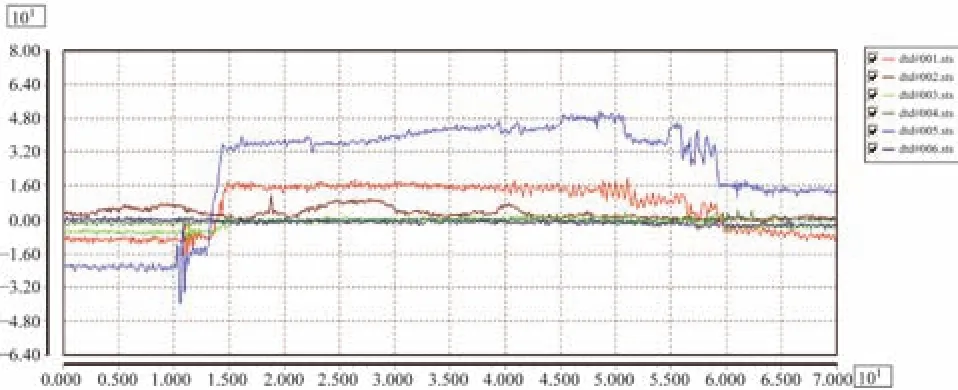
对于系统中可能存在的状态S={1,2,3,4},分别代表风险的4种状态,由低到高为Pi(1) 4种状态相应造成的伤害R=pi·pj,将R分为4个级别:1)R为1~4表示轻度伤害;2)R为4~9表示一般伤害;(3)R为9~12表示较重伤害;(4)R为12~16表示严重伤害。 对系统完成危险源识别后,还需要对各评估单元进行风险估计。机械式停车设备系统包含5个评估单元,对于不同评估单元可采取不同的、有针对性的风险估计方法。 一般而言,对于金属结构、机构及主要零部件采用有限元分析、理论计算、试验测试等方法开展风险估计;对于电气系统、安全保护装置采用检查、测量及功能试验等方法开展风险估计。本文选取比较常用的有限元分析、理论计算、试验测试3种方法进行简要阐述,其他风险估计方法不在此一一列举。 针对系统中金属结构单元的风险估计可采用有限元分析的方法。根据机械式停车设备的设计图纸和现场测量实际尺寸来建立有限元模型。系统所受载荷应该考虑钢结构自重、主要零部件自重,汽车质量,以及地震载荷等。其中地震载荷根据GB 50011—2011《建筑抗震设计规范》,抗震设防烈度取7度,以载荷系数的方式施加在模型中。本文将有限元建模过程省略,只展现最终分析结果。在空载工况下,系统有限元分析结果如图2所示;在额定载荷工况下,系统有限元分析结果如图3所示。 图2 空载工况应力云图 图3 额定载荷工况应力云图 由图2可知,在空载工况下,只考虑自重影响,最大等效应力约为15.7 MPa。由图3可知,在额定载荷工况(自重+车重),最大等效应力约为58.1 MPa。停车设备的金属结构材料为碳钢Q235,材料许用屈服应力为235 MPa,其安全系数大于3.0,能够满足设计规范中强度要求。 针对机构评估单元的风险估计可采用理论计算的方法。在本单元中,其危险源主要是起升机构。起升机构包含电动机,减速器,制动器等部件。本文以电动机为例进行理论计算(功率校核),其余部件的理论计算可参照此方法进行。 本文中的停车设备起升机构所受载荷包括:搬运器质量1 880 kg、车台质量400 kg、钢索质量157.5 kg、汽车载荷2 000 kg。 额定载荷时总质量W1=4 137.5 kg;空载时总质量W2=2 437.5 kg;配重质量W3=2 850 kg。卷扬速度额载时为v1=75.5 m/min,空载时v2=151 m/min,传动效率为η1=0.967,滑轮效率为η2=0.982=0.96。 额载时电动机动率为 空载时电动机功率为 起升机构选取的电动机为FUJI三相电动机MVK6187A,输出功率为22 kW,转速为1 500/3 600 r/min。则电动机容量[Ns]为22 kW,[Ns]>Ns1,[Ns]>Ns2,故电动机理论计算(功率校核)满足要求。 除了静态应力计算(有限元分析),还建议考虑结构在实际工作状态下由动载荷所引起应力变化。本文采用动态电阻应变仪,在停车设备上布设6个应力测试点进行动态应力测试,测试点布置如图4所示。 图4 应力测试点分布 将额定载荷布置在停车设备上,模拟一辆车存取的完整过程作为一个测试循环,实际测量动态应力数据如图5所示。测试结果表明:6个应力测试点的实测数值振幅较小,均在设计标准范围内。 图5 动态应力测试数据 通过上述方法,可逐一对5个评估单元进行风险估计。以此为基础代入马尔可夫链模型中,对械式停车设备系统进行安全评估。 各评估单元的风险等级由危险源所导致伤害的严重程度等级、发生概率等级确定。通过前述有限元分析、理论计算、试验测试等风险估计后可知: 1)金属结构的伤害严重程度为4,即Pi(X1)=4;金属结构发生风险的概率较低,Pj(X1)=1;则Rij(X1)=4,即金属结构的伤害为轻度伤害。 2)主起升机构伤害严重程度为4,即Pi(X2)=4;主起升机构发生风险的概率较低,Pj(X2)=2;则Rij(X2)=8,即起升机构的伤害为一般伤害。 3)主要零部件伤害的严重程度为3,即Pi(X3)=3;主要零部件发生风险的概率较高Pj(X3)=3;则Rij(X3)=9,即起升机构的伤害为一般伤害。 4)电气系统伤害的严重程度为3,即Pi(X4)=3;电气系统发生风险的概率很高Pj(X4)=4;则Rij(X4)=12,即电气系统的伤害为严重伤害。 5)安全保护装置伤害的严重程度为3,即Pi(X5)=3;安全保护装置发生风险的概率很高Pj(X5)=4;则Rij(X5)=12,即安全保护装置的伤害为严重伤害。 安全评估结论为:1)该停车设备整体的风险等级为严重伤害;2)应对电气系统和安全保护装置2个评估单元予以重点关注;3)可以采取必要的维护保养及修理措施以降低其风险等级。 在马尔可夫链模型的基础上,将机械式停车设备划分为5个评估单元,综合采用理论计算、有限元分析、试验测试等方法对各单元开展风险等级估计,并以真实的垂直升降类机械式停车设备作为典型案例,最终形成安全评估模型,得出评估结论。该安全评估方法具有良好的定性精度,未来的研究中,可进一步探索风险等级估计的定量化。3 风险估计
3.1 有限元分析
3.2 理论计算
3.3 试验测试
4 安全评估
5 结论
猜你喜欢
安全(2021年7期)2021-08-09
科技创新导报(2021年33期)2021-04-17
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
科学与技术(2018年5期)2018-11-15
中小企业管理与科技·下旬刊(2017年4期)2017-05-17
企业技术开发·中旬刊(2016年10期)2016-11-12
科技与创新(2016年17期)2016-11-04
考试周刊(2016年2期)2016-03-25
劳动保护(2009年5期)2009-09-24
