
基于Matlab道路线检测系统的研究
2022-10-31 04:01靳鑫黄经校胡洪
电子制作 2022年18期
靳鑫,黄经校,胡洪
(电子科技大学成都学院 信息与通信工程系,四川成都,611731)
0 引言
随着现代交通技术越来越多,人们可以利用的交通工具数量不断增加,可随之而来的还包括交通事故,它严重影响到了人们的生命安全,因此,交通安全的问题不容小觑。我们都知道火车有铁轨,飞机有地面跑道,而汽车也有地面跑道。那么我们该如何通过检测车道线来降低风险是重中之重,对于道路检测的研究不仅是车辆可控制因素的核心问题,而且它有着发展快、技术多、投资多的特点。因此,对地面的道路线识别研究具有重要意义。
目前,我国针对道路线识别系统研究的技术有很多,例如:灰度阈值分割法、边缘检测法和区域生长跟踪法以及基于分水岭算法的分割方法等。对于道路线检测系统研究的重要性不言而喻,本文主要基于三种方法对道路线进行检测并对比,得到检测道路线的最佳算法。
1 道路线检测原理及GUI界面
1.1 otsu阈值分割+hough法变换的原理
otsu阈值分割法的基本原理是把图像按照灰度比分为2个比例,使这两个比例的图像灰度值之间的对比更加明显,而每个比例图像之间的灰度差异最小。其次是通过方差计算得到一个相对合适的灰度级别来划分两个区域。
对图像I(x,y),前景和背景的分割阈值记作T,前景像素点数占整幅图像的比例为ω0,其平均灰度μ0;背景像素点数占整幅图像的比例为ω1,其平均灰度μ1;图像的总平均灰度记为μ=ω0μ0+ω1μ1;类间方差记为g。
假设:背景较暗,且图像的大小为M×N,图像中,像素灰度值小于阈值T的像素个数记作N0,像素灰度值大于阈值T的像素个数记作N1,则有:
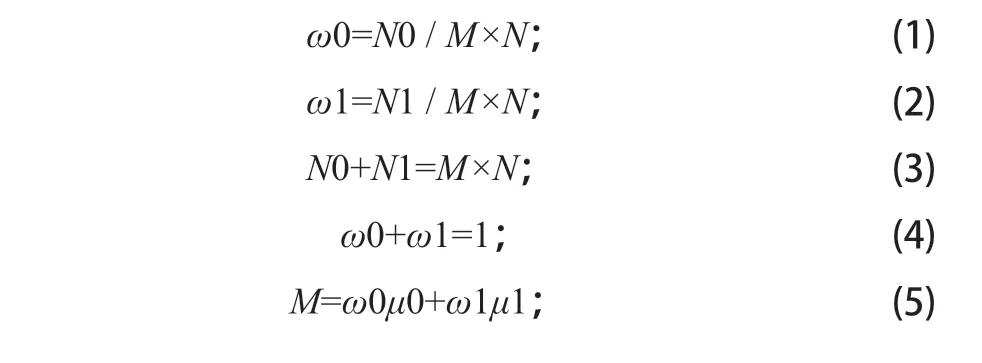

将式(5)代入式(6),得到等价公式:

这就是类间方差,采用遍历的方法得到使类间方差g最大的阈值T,即为所求。
hough变换的基本原理在于,xy坐标空间经过固定一定I(x,y)的多条直线参数可以映射到由这些直线参数所组成的参数空间的一条曲线。假设将所有直线在二维图像中的像素点映射到参数空间中,并对参数进行叠加,就可以形成多条曲线。在实际应用中,首先要进行参数空间初始化,也就是矩阵像素点置0;其次要记录所有经过不为0像素点的直线参数,在参数空间中加1,形成一个累加器;最后分析参数矩阵,获取多个峰值进行检测。
1.2 直方图阈值分割+hough变换法的原理
直方图阈值分割+hough变换法的基本原理是把先图像的灰度分成不同的等级,然后确定灰度和门阈值。其次,对图像的阈值化处理是一种阶梯函数,它的功能是先指定一个阈值,如果图像中的某个像素大于该阈值,则像素的灰度值为255,否则为0。最后根据灰度直方图的分布情况,观察直方图的波峰和波谷,选取谷底的值为最佳阈值,利用最佳阈值对图像阈值化处理,把目标和背景分离,达到检测直线的效果。Hough变换的基本原理和前文中介绍的相同。
1.3 区域生长跟踪法的原理
区域生长跟踪法的基本原理是先把相似性质的像素点合并在一起,然后选取一个种子点,确定该种子点在生长过程中将相邻的像素全部覆盖,最后令种子点停止生长。其中确定了种子点的起点后,将它周围相邻的像素点和种子点进行对比,相似的种子点保持向外生长的状态,直到没有满足条件的像素点被包括进来为止。
在种子的选取中,大部分情况下都选取人工交互的方法实现,其他方式比如寻找物体并提取内部点,都要找到特征点作为种子点;在生长过程中,相邻像素要包括灰度值差值之间的对比、彩色图像的颜色、梯度特征等,根据它的特征,利用区域生长法进行生长。
通过对以上三种方法原理的介绍,otsu阈值分割+hough变换法和直方图阈值分割+hough变换法都是在选取最佳阈值的基础上对二值图像进行hough变换,其中hough变换首先需要进行边缘检测,其次要确定待测量直线段的最小长度和线段间距离,最后将符合条件的直线进行标记,在一定程度上增大了道路线检测的难度。而区域生长跟踪法只需要利用种子点搜索二值图像中物体的外边界,用不同颜色标记不同性质的区域,最后在图像上叠画每一个线条的边界,该检测法的原理相比另外两种方法的原理更加简单,实际应用性更强。
1.4 GUI人机交互界面设置
MATLAB GUI为图形用户接口(Graphical User Interface,简称GUI),指采用图形方式显示的计算机操作用户界面。GUI只需要通过菜单栏选择需要的图形对象来操作设置界面即可。正是因为GUI为用户提供了极大的方便,所以备受青睐。
本系统所设计的人机交互GUI界面如图1所示。
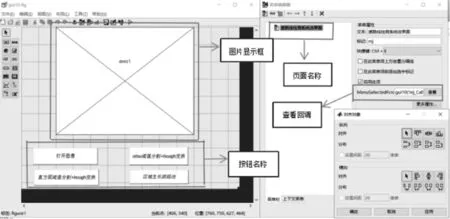
图1 道路线识别系统的GUI界面
2 道路线检测系统设计
本文基于道路线检测原理,利用不同算法对进行道路线检测。包括otsu阈值分割+hough变换法、直方图阈值分割+hough变换法、区域跟踪生长法,并结合GUI人机交互界面,对道路线检测不同方法的图像进行结果展示,设计开发道路线检测系统。
由于图像采集时存在一些不确定因素的影响,比如彩色图像光线过亮、图像模糊等情况,都会影响道路线检测的正确率,因此道路线检测在实际检测过程中仍存在一定困难。本文所利用的otsu阈值分割+hough变换法和直方图阈值分割+hough变换法,都要先对采集的图像进行阈值分割得到二值图像后,再分别进行边缘检测和hough变换,而区域生长跟踪法先要对采集的图像二值化,其次下种子点搜索物体外边界,最后用不同颜色标记不同区域。道路线检测系统总体设计方案如图2所示。
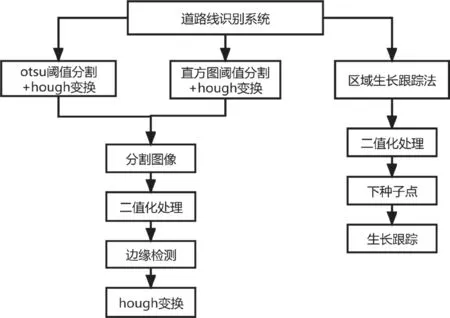
图2 系统总体设计方案
2.1 otsu阈值分割+hough变换法设计流程
利用otsu阈值分割+hough变换法进行道路线检测的流程包括:读取图像、灰度处理、otsu阈值分割、边缘检测、hough变换提取直线、道路线检测。如图3所示。
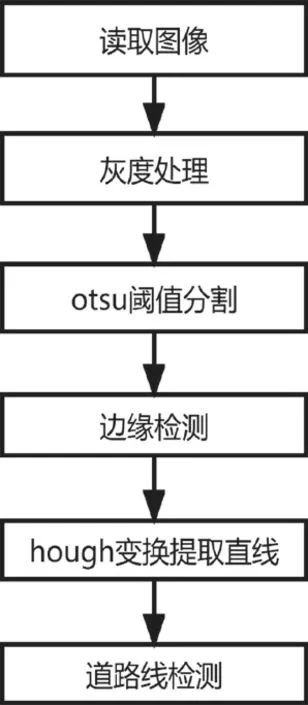
图3 otsu阈值分割+hough 变换法处理流程
2.2 直方图阈值分割+hough变换法设计流程
利用直方图阈值分割+hough变换法进行道路线检测的流程包括:读取图像、灰度处理、直方图阈值分割、边缘检测、hough变换提取直线、道路线检测。如图4所示。
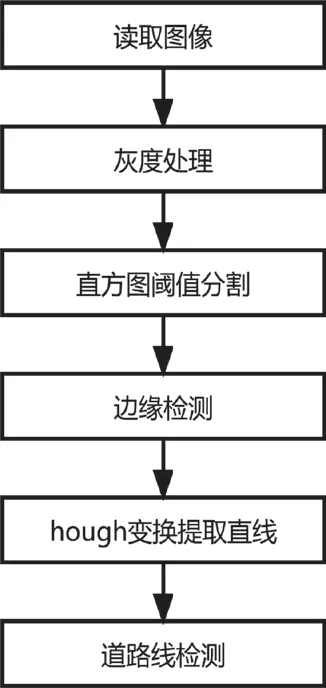
图4 直方图阈值分割+hough变换法处理流程
2.3 区域生长跟踪法设计流程
利用区域生长跟踪法进行道路线检测流程包括:读取图像、二值化处理、下种子点、区域生长跟踪、道路线检测。如图5所示。
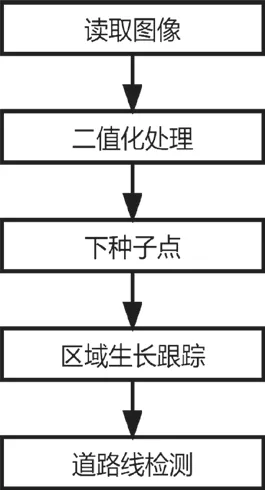
图5 区域生长跟踪法处理流程
3 道路线检测系统的结果与分析
分别应用otsu阈值分割+hough变换法、直方图阈值分割+hough变换法、区域生长跟踪法对道路线进行检测。基于实际道路图像,验证三种检测法的有效性,并进行对比分析。
图6 所示的图像一和图像二均是MATLAB GUI界面系统实现图像效果,点击“打开图像”按钮,则出现待检测道路线的图像,同理,点击其他按钮都会在按钮上方显示该按钮所对应的功能图像。下面将点击不同按钮对道路线检测进行结果显示。
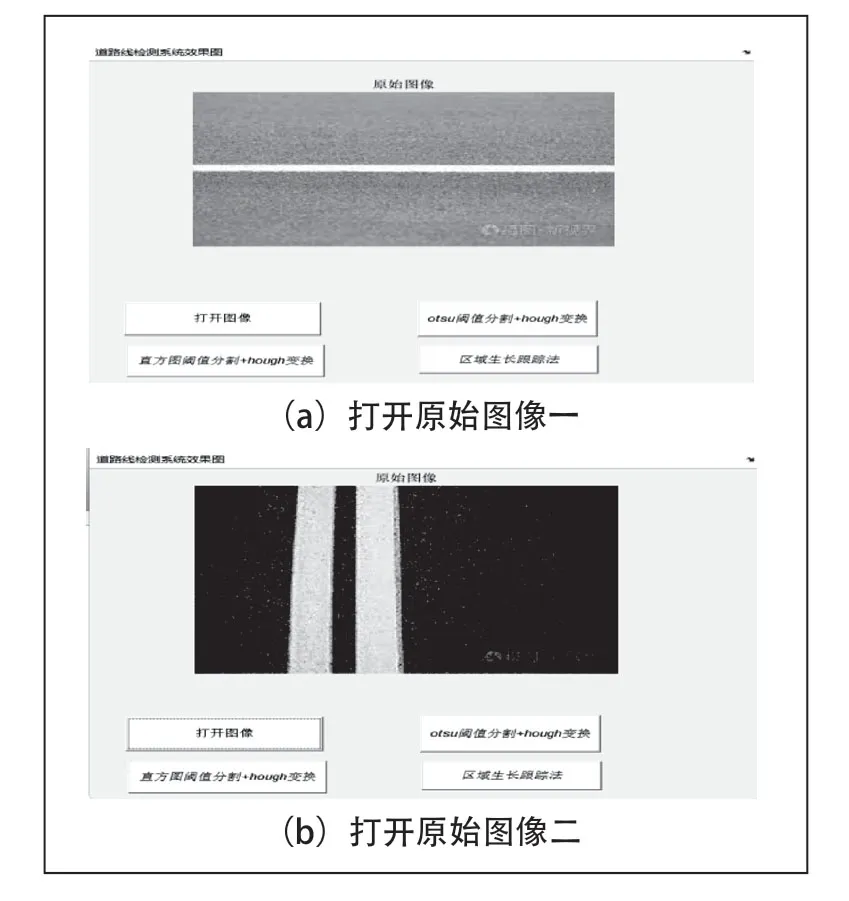
图6
图7 (a)和7(b)使用hough变换时,对hough矩阵进行阈值检测,阈值设置为矩阵最大值的0.3,将大于阈值的点作为备选点。取hough矩阵中备选点中的极大值点为峰值点,这些峰值点对应的参数空间坐标即所检测直线的参数。峰值点个数设置为n个,即提取n条目标直线。参数空间分别选取矩阵第二列全部坐标的角度值以及矩阵第一列的所有行。且图7(b)根据灰度直方图选取直方图谷底的值200为最佳阈值。线条绘图的参数设置如下:线段合并的阈值设置为300,检测直线段的最小长度的阈值设置为4,标记道路线的线宽设置为3。
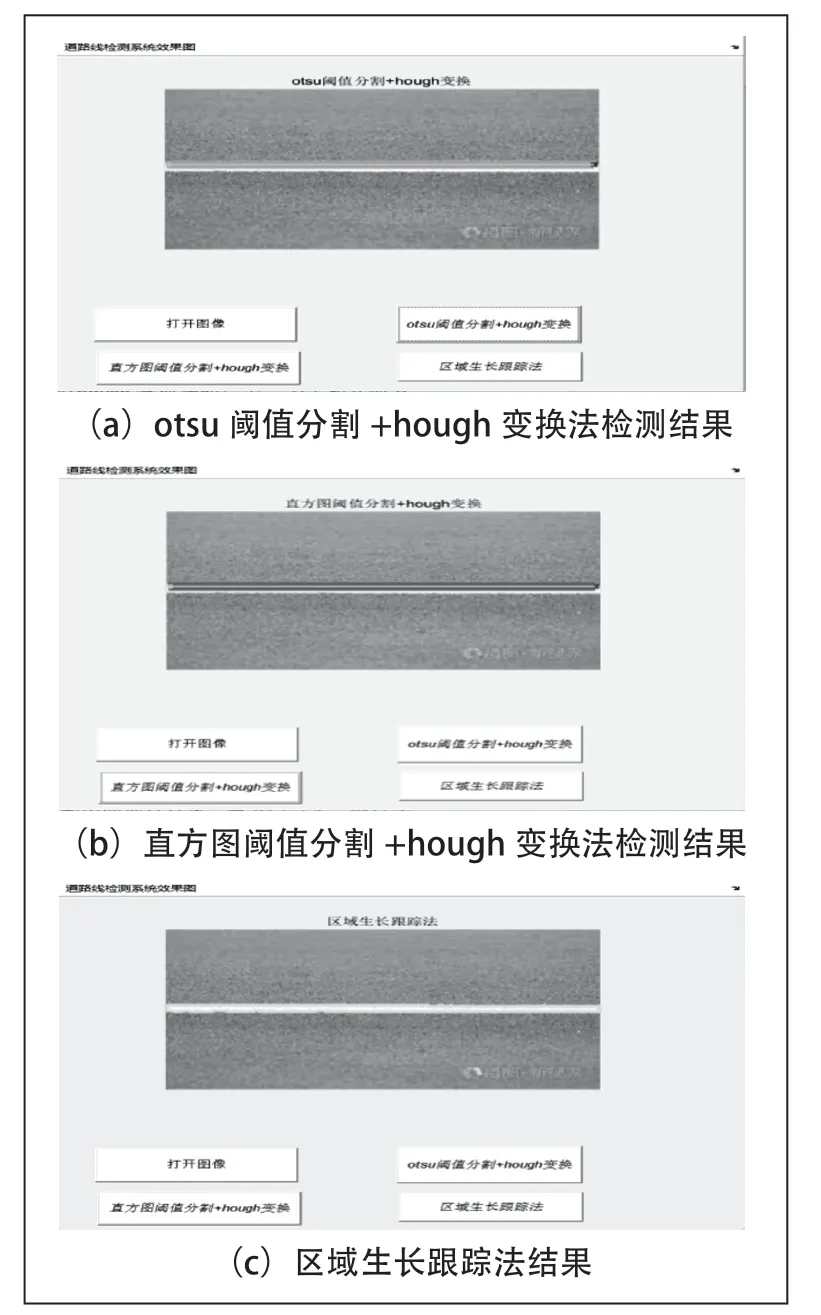
图7 图像一的应用结果
图7(c)使用区域生长跟踪法设置参数时,只需要将线条绘图的参数即线宽设置为3,其余部分均利用种子点用不同颜色标记不同性质区域的性质来完成。
从图7可以看出,虽然三种方法在图像一所示的道路上都得到了初步的检测效果,但和otsu阈值分割+hough变换法(图7a)和直方图阈值分割+hough变换法(图7b)相比,区域生长跟踪法(图7c)得到了更完整的道路线检测结果。
图8 (a)和8(b)使用hough变换时的参数同图7的设置相同。而线条绘图的参数设置如下:将线段合并的阈值设置为500,检测直线段的最小长度的阈值设置为160,标记道路线的线宽设置为3。
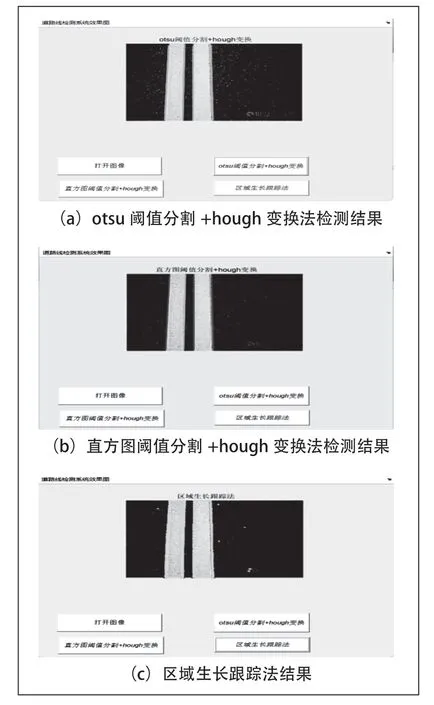
图8 图像二的应用结果
图8(c)使用区域生长跟踪法设置参数时,这里将线条绘图的参数即线宽设置为2,其余部分也均利用种子点用不同颜色标记不同性质区域的性质来完成。
从图8可以看出,otsu阈值分割+hough变换法(图8a)和直方图阈值分割+hough变换法(图8b)虽然检测除了大部分道路线,但图像边缘仍存在一定不足。而区域生长跟踪法(图8c)的检测结果比另外两种检测法的图像结果显示更加完整。
另外,在实际应用中,基于hough变换的方法,线段合并的阈值和检测直线段的最小长度的阈值如果设置不得当,检测到的道路线就会缺失。而线宽如果设置过大,道路线就被全覆盖,不能很好地将道路线边界和中间部分分离;若设置过小,则只能检测道路线边界部分,中间白色道路部分不清晰,达不到理想的效果。而区域生长跟踪法对每一条道路线都用黄色的线包围,道路线边界和中间部分色彩差异明显,且背景与目标对比明显,同时该检测法无需进行hough变换的参数设置便能够完成道路线的检测,很大程度上降低了操作难度,利用该检测法准确率较高。
以上两个实验应用成功验证了区域生长跟踪法的效果最佳以及在实际应用中的可行性。
4 结束语
本文经过图像采集后,首先通过matlab实现了基于灰度图像的道路线检测,同时研究其原理进一步获得检测车道线的方法,其次设置了GUI人机交互界面对图像进行处理,分别利用otsu阈值分割+hough变换法、直方图阈值分割+hough变换法以及区域生长跟踪法完成道路线的检测,最终实验结果验证了区域生长跟踪法在道路线检测系统中应用的可行性和优越性。
猜你喜欢
现代电子技术(2022年11期)2022-06-14
包装工程(2022年9期)2022-05-13
建材发展导向(2021年19期)2021-12-06
科技研究(2021年15期)2021-09-10
集装箱化(2021年1期)2021-04-12
中国信息技术教育(2020年2期)2020-02-02
影像视觉(2018年12期)2018-11-29
分析化学(2017年12期)2017-12-25
中学生数理化·高一版(2017年2期)2017-04-25
初中生世界·八年级(2017年3期)2017-03-24
