智能伸缩型青贮取料机的研制
2022-10-29 12:22范良俊
农业开发与装备 2022年9期
范良俊
(上海市农业机械研究所,上海市 201100)
1 国内外现状
青贮饲料作为奶牛养殖的主要粗饲料,对奶牛养殖有着重要的意义,如今奶牛养殖已经实现集约化和规模化,而青贮取料则是其中关键作业的环节。欧美国家的牧场规模大,青贮取料设备也十分先进。如意大利司达特生产的Dobermann自走式青贮切割搅拌机(图1),包括立、卧式两种搅拌形式,容积从12~28 m3不等,通过机电液一体化技术和自动控制技术,其实现了青贮取料、输送、搅拌和设备行走等多个功能;法国库恩生产的SPW型自走式饲料搅拌机(图2)具有高效的青贮切割性能,均匀的搅拌效果和高质量的喂送功能,料箱容积从19~25 m3不等,自带可编程称重系统,实现精确喂送;自带的液压系统可以满足行走、切割、升降等多个功能,且均可实现编程控制。这些进口的青贮切割搅拌机一般配备180~300匹的大马力发动机,设备的行走、取料、伸缩均采用了集取料、运输、搅拌及地盘行走为一体的电液控制系统。

图1 Dobermann自走式青贮切割搅拌机

图2 SPW型自走式饲料搅拌机
国内牧场对于青贮取料大部分会采用铲车铲挖的方式,容易造成青贮饲料的坍塌和浪费。主要还是因为进口设备过于昂贵,国内设备性能不可靠和一些牧场的规模相对较小等原因。但随着我国牧场规模的不断扩大,牧场对于机械化作业的需求也十分迫切。通过引进吸收消化国外技术的方式,青贮取料机也不断国产化。黑龙江省畜牧机械化研究所在2017年研制的9JLQQ-1600型自走式青贮取料机,该设备装备了两套液压系统,行走液压系统和取料液压系统,解决了国产青贮取料机车轮小和底盘低,取料滚筒动力不足,行走速度和跨越障碍能力差的问题;9QQ-1600-5型全遥控青贮取料机(图3),采用电机控制双联泵的液压系统控制地盘行走和取料作业,取料宽度1.6 m,高度可达4 m以上。虽然国内已经研发出一部分青贮取料机,但是依然存在很多缺点和不足,大多为电机驱动并需要现场拉电,设备转运不方便,取料高度相对较低,取料截面不平整容易造成塌陷。因此,研发一款行动灵活、截面平整,取料效率高的青贮取料设备很有必要。

图3 9JLQQ-1600型自走式青贮取料机
2 取料机总体方案
本次研发的可伸缩取料臂青贮取料机主要由取料头、伸缩臂组件、举升臂组件、操控系统、行走与机架组件、动力系统、排料输送等机构组成。该机采用全液压控制,可实现手动和自动两种操作模式。设备性能参数如表1。
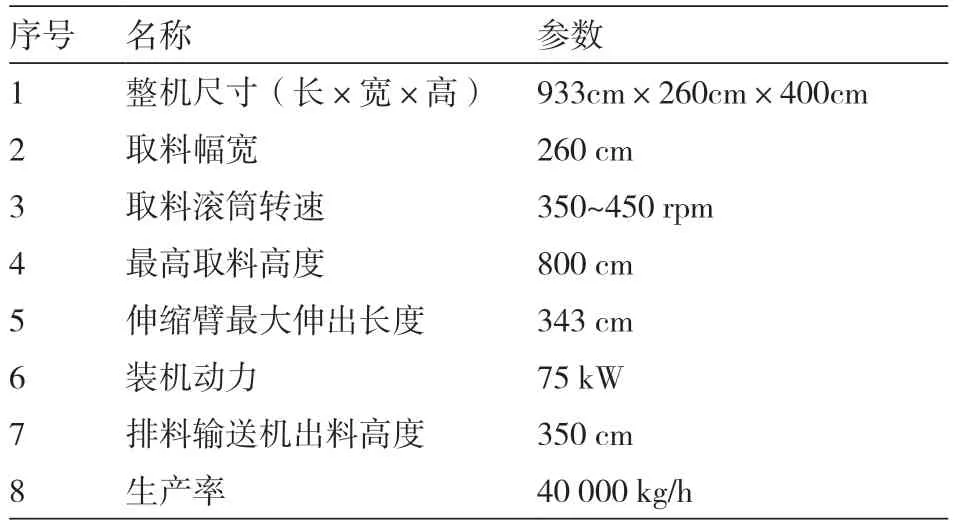
表1 高效可伸缩取料臂青贮取料机性能参数表
2.1 取料机构
该取料机采用全密封的伸缩机构,伸缩机构可根据青贮饲料高度伸缩取料头,取料高度最高可达8 m,伸缩机构端部设置有取料滚筒,物料切割作业时可保障切割面接近90°,有效避免物料在取料过程中的坍塌。伸缩臂内部设置多节传送带,从而确保饲料稳定、连续运送。
根据图4所示,取料作业时,将举升臂组件提升至取料头到青贮窖最高处的合适位置并开始取料,同时伸缩臂开始伸出进行一定深度的取料作业,当完成一定深度的取料后,下降一定高度继续取料,伸缩臂缩回,如此往复作业,避免了原有上下作业时一半的空行程,提高了效率。其次,能够保证取料截面接近90°,防止青贮饲料塌陷。
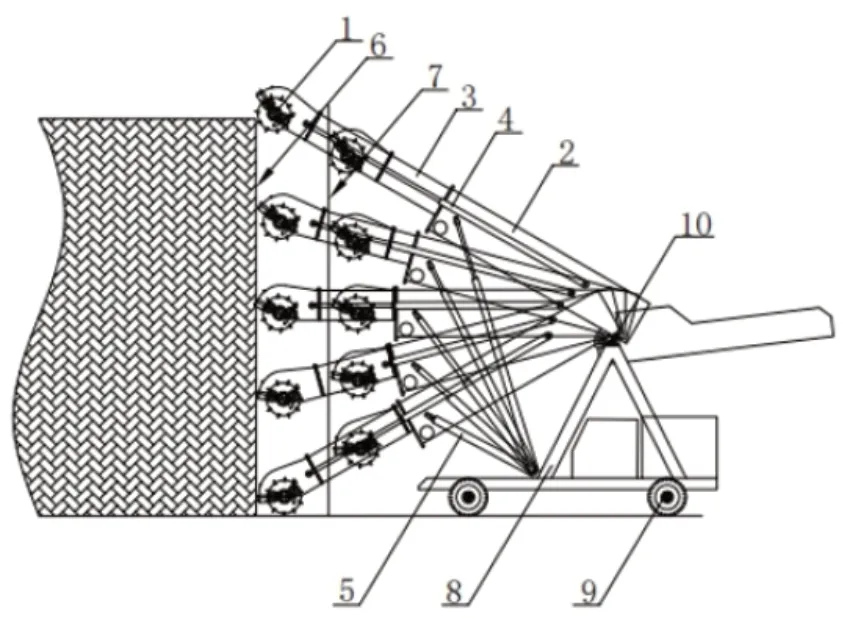
图4 伸缩型青贮取料机取料方法示意图
2.2 行走系统
该机的行走系统拥有行走与横向移动两种方式,且均采用液压行走系统。在转场作业时,采用行走、液压转向;由于青贮饲料横向长度较长,通过转向实现取料机横移所需掉头空间很大,且浪费时间。本次研发的取料机行走系统带有横向行走系统,通过升降油缸将横向行走马达降至地面。再利用横移马达实现取料机整机横移,提高设备灵活性,提高生产效率。
2.3 液压系统
本设备液压系统主要可实现取料臂的举升、取料头和青贮料的输送功能,除此之外,可实现取料机的行走、转向、横移和驻车等功能。伸缩型青贮取料机的液压系统原理如图5所示。本取料机液压系统由三联液压马达作为驱动,分别控制取料机的不同工况。

图5 伸缩型青贮取料机的液压原理图
2.3.1 取料工况
取料马达和排料马达连续工作,伸缩油缸和举升油缸分别交替工作。液压油通过大流量液压泵1、溢流阀4.1,通过电磁换向阀6.3左侧得电,进入取料马达带动取料切刀进行切料取料作业;液压油通过中流量液压泵2、溢流阀4.2、分流阀5.3进入伸缩油缸14,通过电磁换向阀6.4左右得电,可使取料头进行水平伸缩移动;液压油通过中流量液压泵2、溢流阀4.2、分流阀5.3和5.4,通过电磁换向阀6.7左右得电,可使取料臂上下运动并带动取料切刀进行上下移动;液压油通过小流量液压泵3、溢流阀4.3、通过电磁换向阀6.9左侧得电,驱动排料马达,将取料头取得的青贮料向外运送。
2.3.2 行走工况
设备行走时,电磁换向阀6.1和6.2左侧得电,制动油缸8松开,液压油通过大流量液压泵1,经过溢流阀4.1和电磁换向阀6.2和6.3至行走马达,通过后桥带动行走地盘进行行走。当取料机需要转向时,只需通过转动方向盘从而推动转向油缸实现转向轮转向。当设备需要横移时,电磁换向阀6.11左侧得电,横移支腿油缸定出,待横移轮落地并支撑起取料机后,电磁换向阀6.10左侧得电,横移马达工作,实现取料机横移作业。
2.4 控制系统
本设备的控制系统采用PLC控制系统,通过控制电磁换向阀实现取料、排料、行走、转向和横移等动作。特别是在取料作业时,需要合理控制伸缩油缸和升降油缸的动作,从而实现取料头的运动轨迹。通过安装在油缸内部的位移传感器可以实时监测油缸的实际位移,从而确定取料头的位置。通过对不同高度的青贮饲料进行分点定位,确保在不同高度的青贮饲料都可以实现自动取料作业,并保证取料截面接近90°。
3 参数计算
3.1 油缸速度计算
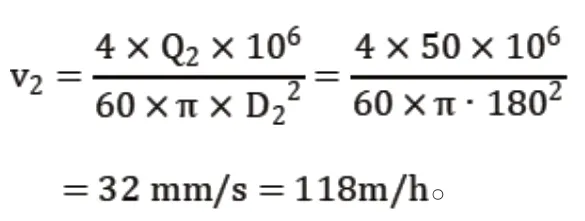
已知伸缩油缸的额定流量为Q1=25 L/mm,升降油缸的额定流量为Q2=50 L/mm。设伸缩臂油缸缸径D1=100 mm,杆径d2=70 mm,升降油缸采用三级油缸,其最大缸径D2=180 mm,最大杆径d2=160 mm。
则伸缩臂油缸伸出的速度:

升降油缸伸出的速度:
3.2 生产效率计算
为满足智能伸缩型青贮取料机单机75 kW功率下的每1h取料能力40 t的要求,进行如下核算。已知青贮料密度大约为ρ=750 kg/m3。
设取料臂水平方向速度V1=191 m/h,竖直方向速度为V1=118 m/h,取料臂完成一次取料下降L1=0.2 m,取料臂水平取料长度为L2=2 m,割幅宽度L3=2.6 m。
1)青贮饲料堆高L为8 m时:取料机完成一次等高取料总质量约为

取料机刀头下降次数约为n1=40次,水平移动次数n2=41次,完成等高全部取料时间大约为

则取料机取料额定效率约为:
2)青贮饲料堆高L为6 m时:取料机完成一次等高取料总质量约为

取料机刀头下降次数约为n1=30次,水平移动次数n2=31次,完成等高全部取料时间大约为

则取料机取料额定效率约为:
3)青贮饲料堆高L为5 m时:取料机完成一次等高取料总质量约为

取料机刀头下降次数约为n1=25次,水平移动次数n2=26次,完成等高全部取料时间大约为

图6 智能伸缩型青贮取料机空载试验

则取料机取料额定效率约为:
4)青贮饲料堆高L为4 m时:取料机完成一次等高取料总质量约为

取料机刀头下降次数约为n1=20次,水平移动次数n2=21次,完成等高全部取料时间大约为

则取料机取料额定效率约为:
综上所得,青贮窖在8 m、6 m、5 m和4 m堆高情况下,取料量都大于40 t/h,满足设计的要求。
4 整机试验
在对本次智能伸缩青贮取料机进行组装后,进行空载和带载试验。空载时,取料马达、传送带马达运行正常,伸缩油缸和升降油缸运行顺畅,满足取料工况的要求。取料机各个主要部件运行参数如表2。
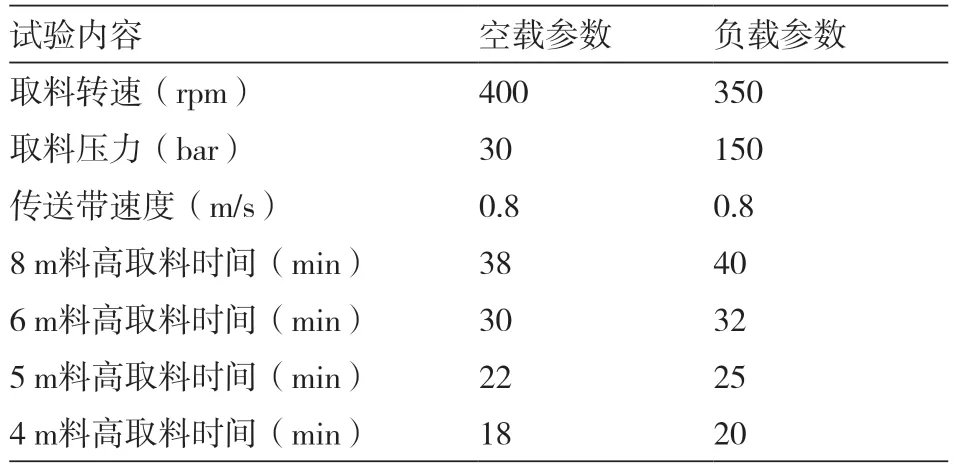
表2 青贮取料机试验参数
5 结论
通过大量的生产性试验,本次研发的智能伸缩青贮取料机基本满足预计的取料效率,优化了传统取料的工艺流程,提高取料效率。随着国内奶牛养殖规模的不断扩大,这一类大型、高效、智能的青贮取料机将会发挥越来越大的作用。
猜你喜欢
广东蚕业(2022年5期)2022-11-21
农业技术与装备(2022年8期)2022-11-19
汽车零部件(2022年5期)2022-05-30
科学与财富(2021年35期)2021-05-10
新农村(2018年35期)2018-04-02
科技创新与品牌(2017年9期)2017-10-20
科技创新与应用(2017年6期)2017-03-23
集装箱化(2016年8期)2016-10-20
实践·党的教育版(2014年10期)2014-10-30