基于卡尔曼滤波PID控制的精量排种器优化设计与试验*
2022-10-27 04:01刘思幸柴岩柳天虹李爽缪宏韩非
中国农机化学报 2022年11期
刘思幸,柴岩,柳天虹,李爽,缪宏,韩非
(1. 扬州大学机械工程学院,江苏扬州,225127; 2. 扬州大学信息工程学院,江苏扬州,225127)
0 引言
中国是农业大国,蔬菜产业是我国除粮食作物外栽培面积最广、经济地位最重要的作物。而设施蔬菜种植打破了季节、气候等条件的限制,保证了蔬菜的产量供应,提高了蔬菜产品质量,有利于蔬菜生产的产业化[1-2]。
设施蔬菜产业的快速发展,对其配套的播种装备提出了新的要求。对于不同的设施蔬菜种植,其对应的株距各不相同[3]。另外,为了有效利用土地,使蔬菜增产增效,设施蔬菜往往采用套种模式,不同蔬菜的株距、密度不一,需要每一行都有独立的排种器根据不同株距调整转速[4-6]。在播种机上设置合理的排种装置,对解决设施蔬菜播种过程中的株距不一致问题,具有极其重大的意义[7-9]。传统排种驱动方式容易由于地轮打滑造成漏播现象,降低株距合格率,采用步进电机直接驱动排种轴为该问题提供了解决办法,但是电机控制容易受到噪声干扰,使灵敏度和精度降低,无法实现精量播种。对此,在控制系统中加入滤波算法,减少噪声影响,成为播种机精量播种的重要研究方向[10-15]。随着我国农业机械化水平的不断提升,对于小粒径的设施蔬菜精量播种机的研究逐渐增多。解彬彬[16]、张静[17]依据测速传感器和角编码器采集数据,通过模糊算法自动调整排种器转速,实现精量排种。王冰媛[18]提出了小粒径种子流体喷洒播种方法,设计了喷播式小粒种子流体播种机,满足蔬菜种子播种要求。孙静鑫等[19-20]结合了环槽式和窝眼轮式两种排种器优点,利用排种器的护种板辅助完成排种工作。李金凤等[21-23]采用负压内侧吸种,正压吹气投种的方式,解决播种机传动系统和气流管路复杂、布局困难的问题。国外发达国家的设施蔬菜精量播种机主要采用气力式排种器进行播种,技术成熟且装备完善,具有较高的智能化、精量化和通用化水平[24-25]。综上,国外上述播种机体型庞大,价格高昂,配件供应不及时,且土壤种植条件、气候、降水等均与国内存在明显差异,并不适应中国的设施蔬菜种植模式;而国内学者对精量播种排种器结构设计进行了深入研究,但对排种装置控制系统的无噪声干扰方面的研究较少。
本文针对我国设施机械的现状和设施蔬菜种子精量播种过程中漏种、株距不一致、株距合格率低等问题,设计了一种基于卡尔曼滤波PID控制方法的精量排种器装置。并进行旋转正交台架试验,得出该排种装置精量排种作业的最优参数组合,验证所设计排种装置的性能是否满足设施蔬菜精量种植要求。
1 结构和工作原理
1.1 排种器结构
如图1、图2所示,播种机排种装置主要由排种步进电机、排种器、种箱、测速地轮和编码器5部分组成。播种机在机架侧面设有步进电机安装架,安装架通过螺栓固定在机架上,步进电机通过联轴器与排种轴连接,步进电机外侧装有编码器,测速地轮置于机架前方,用于检测牵引机前进速度,轮架上设有拉伸弹簧,使地轮保持贴地,并具有减震功能。
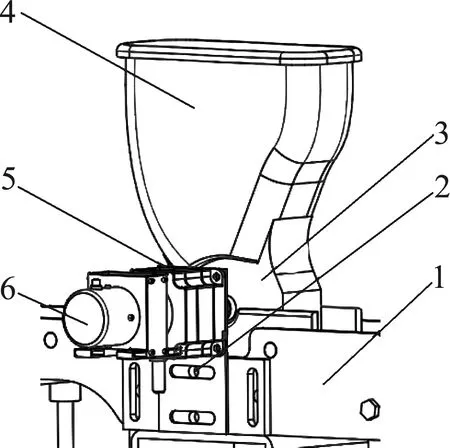
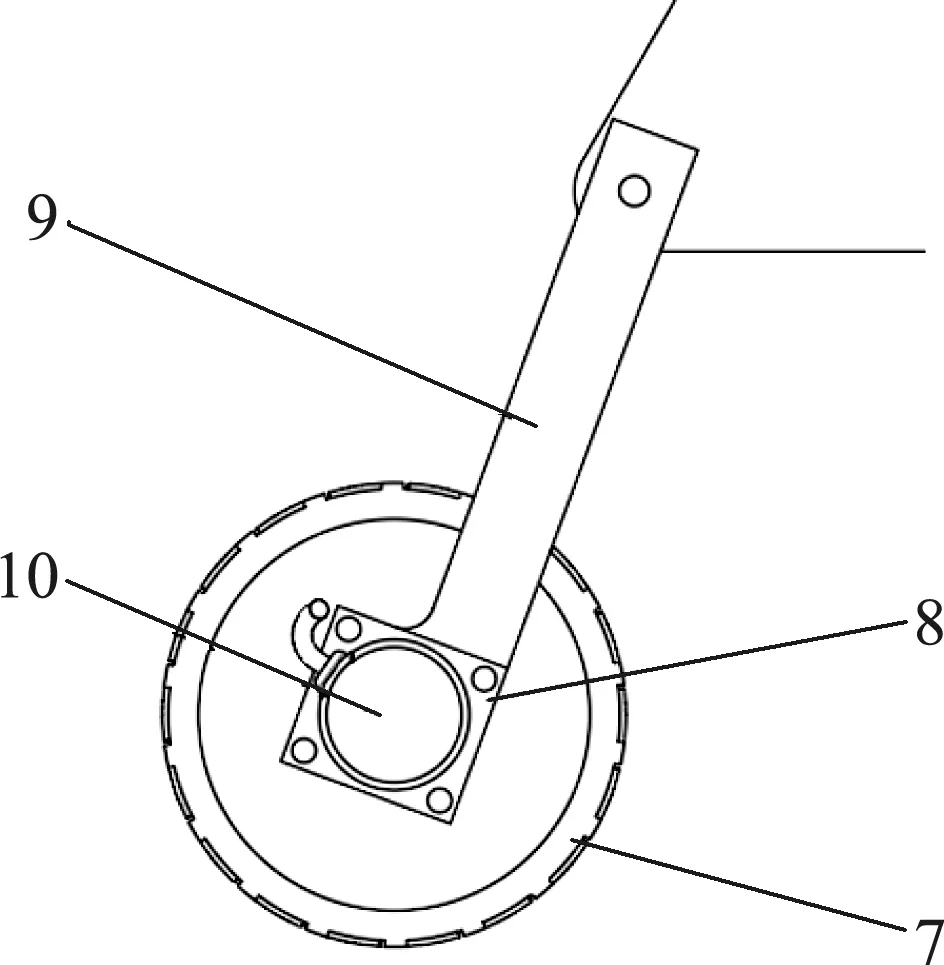
(a) 排种器关键部件 (b) 地轮附件
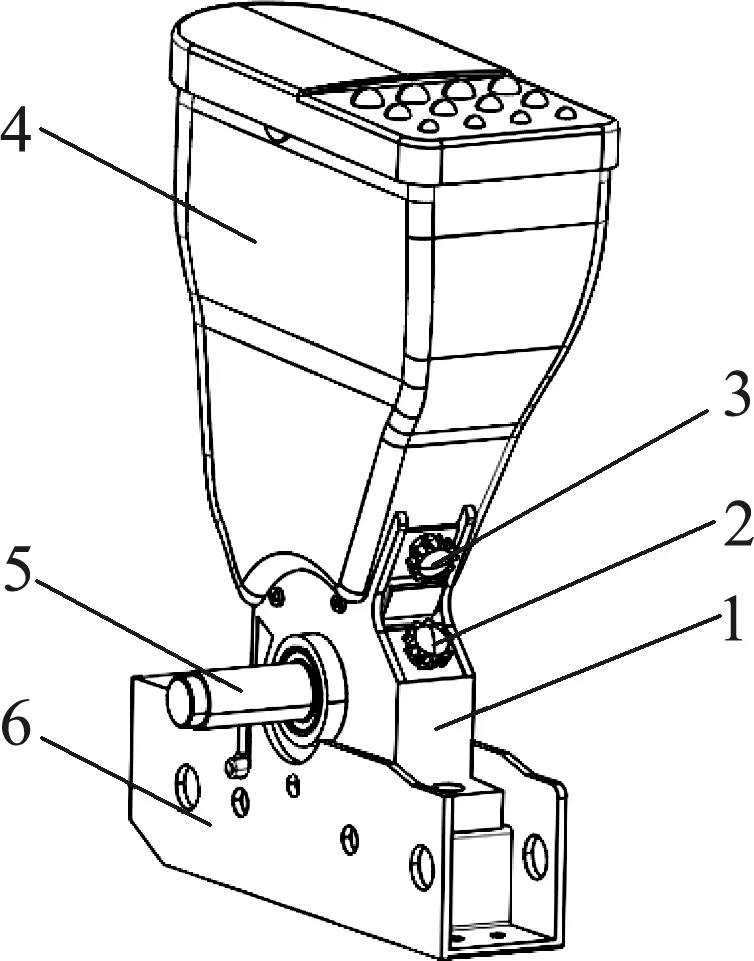
图2 排种部件结构图
1.2 工作原理
播种机工作时,首先由整地轮对播种之前的作业平面进行平整,随后由监测地轮上的脉冲采集装置采集到地轮转动生成的脉冲信号,结合地轮直径计算出播种机前进速度,之后控制器通过计算采集到的播种机行进的速度信号,针对不同设施蔬菜株距要求,驱动排种步进电机工作,进而驱动排种轮的转动,并加以反馈控制,从而完成整个排种作业。
2 控制系统设计
2.1 总体设计
排种控制系统由主控制器、电平转换单元、执行单片机、步进电机驱动器、步进电机、编码器和排种轴组成。主控制器和执行器通过RS-485信号进行排种指令的发送和执行的反馈,主控制器发出排种数字信号,执行器将接收到的信号转为脉冲信号下发给驱动器,进而驱动步进电机带动排种轴转动相应角度,设施种子沿排种盘下落,完成一次排种作业。其控制系统总体框图如图3所示,CAN总线通讯和步进电机驱动电路设计图如图4所示。
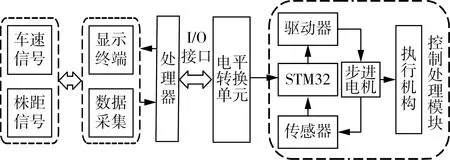
图3 控制系统总体框图
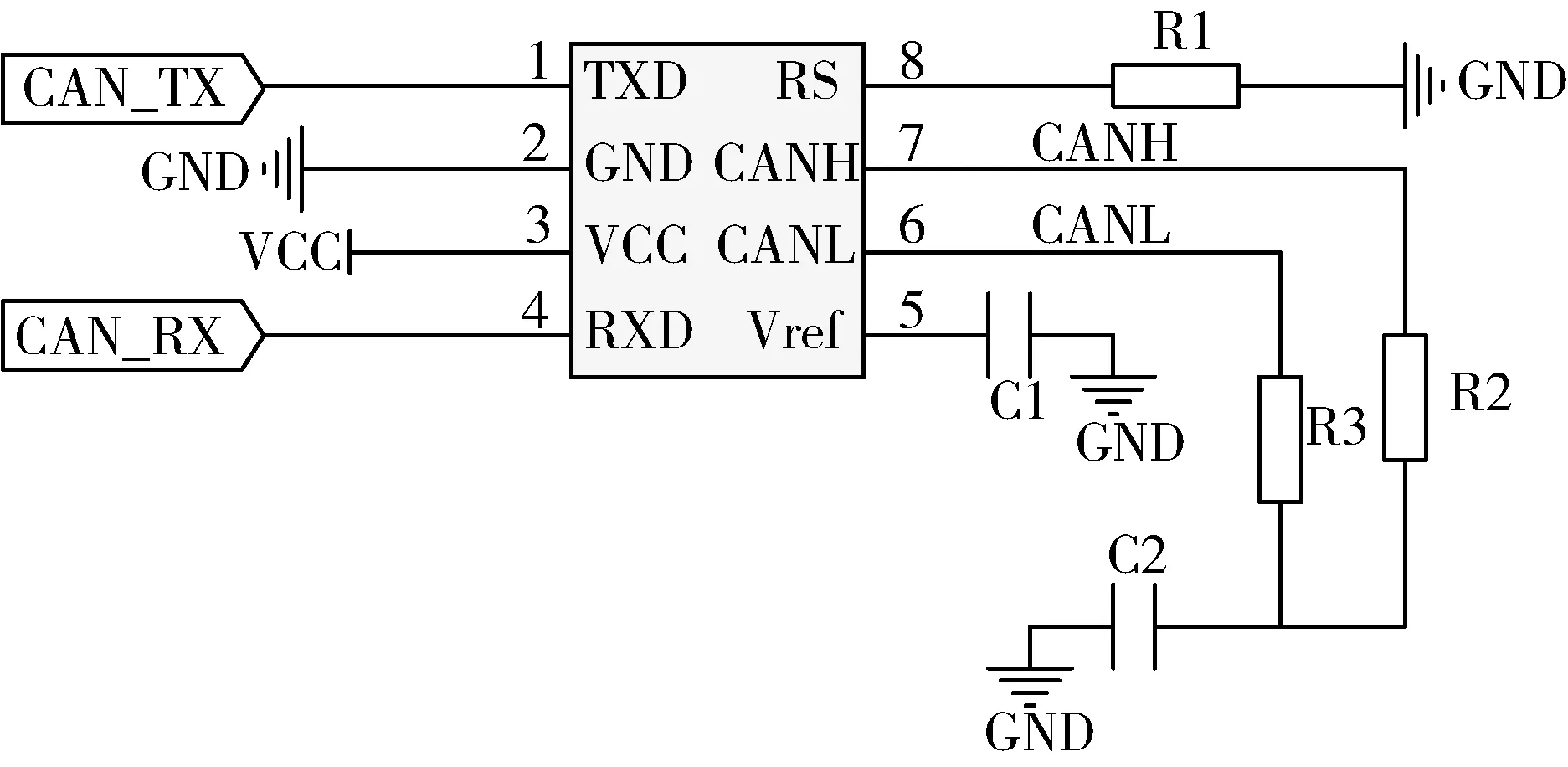
(a) CAN总线通讯电路
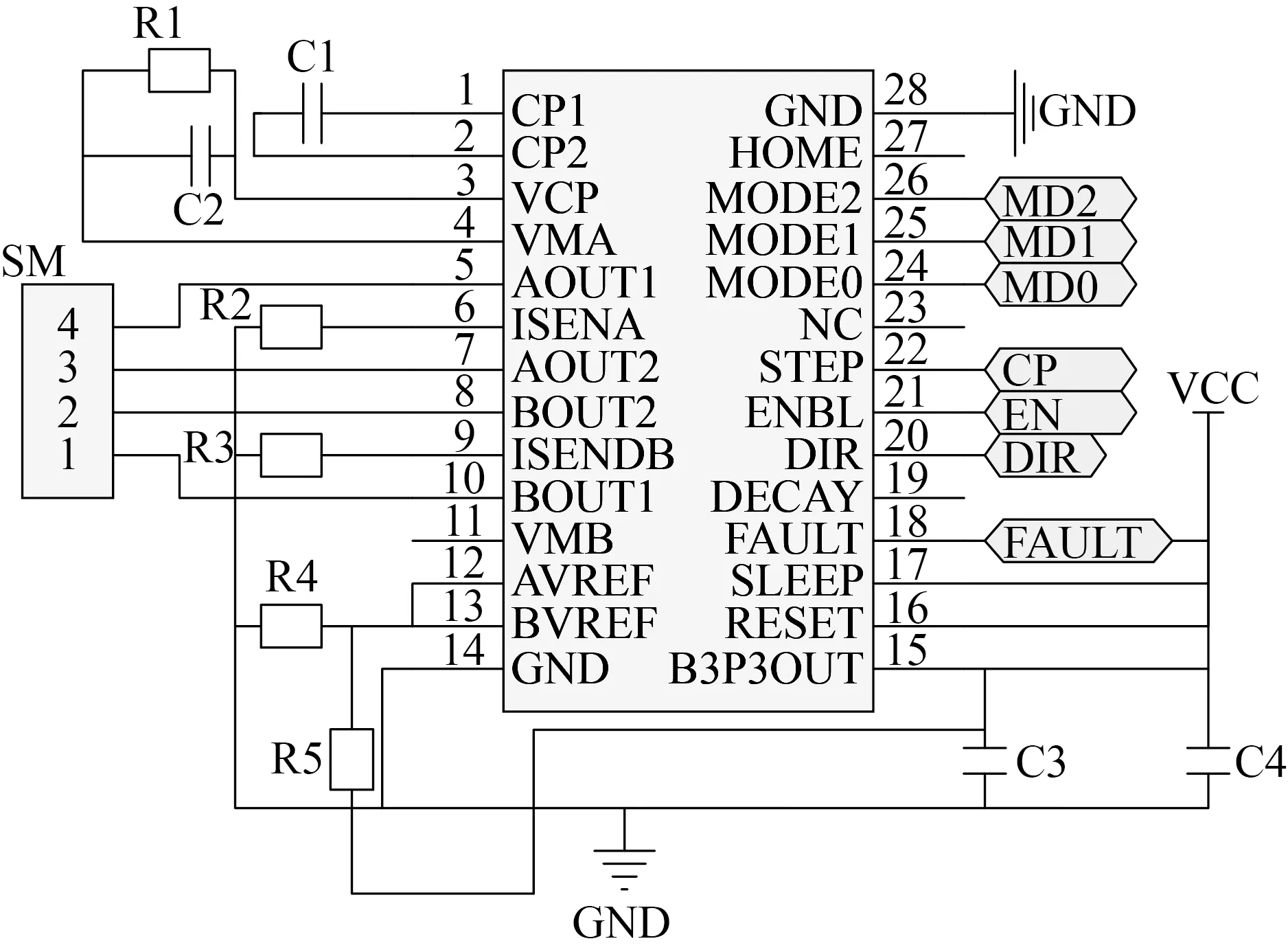
(b) 步进电机驱动电路
2.2 控制原理
设施蔬菜精量播种需要对排种器排种进行精准控制,而在实际播种过程中,地块不平整、打滑、磁场等因素严重影响排种器排种精度,引入一种卡尔曼滤波PID控制方法,对步进电机进行实时反馈控制。播种过程中,控制器根据用户设定株距值并结合测速地轮采集的实时速度数据,计算出当前电机所需脉冲数,与编码器采集的实时电机转速进行分析和判断,对于产生的数据偏差通过控制方法及时修正,从而产生当前应该输出的控制信号,经过执行机构施加到步进电机上,实现精量排种的目的。
输入脉冲数与理论株距计算关系如下:株距调节依靠步进电机独立驱动实现,设理论设定株距为s(cm),排种器转速即步进电机转速为n1(r/min),排种器每转排出种子数为k,则在时间t(s)内播种机前进的距离
L=n1tks
(1)
因此要满足在时间t内排出种子的株距要求,牵引机需要前进同样的距离L(m)。已知牵引机前进速度由测速地轮获得,具体为由安装在地轮上的编码器采集到时间t内的脉冲数计算而得,设编码器的分辨率为P(即为编码器旋转一周输出的脉冲数),时间t内编码器输出的脉冲数为ΔP,则编码器测得地轮的转速
(2)
设测速地轮的直径为d(mm),可得时间t内地轮走过的距离LZ(m),有
LZ=πdnt
(3)
可知LZ即牵引机前进的距离,即LZ=L,将式(1)、式(3)联立,可得
πdn=n1ks
(4)
进而可得牵引机前进速度V(m/s),有
(5)
步进电机转动靠输入脉冲信号实现,每输入一个脉冲信号给电机,转子转过一个角度(步距角),设步距角为β,输入脉冲数为kc,则步进电机转速
(6)
将式(5)、式(6)联立,可知要满足理论设定株距的要求,需要向步进电机输入的脉冲数
(7)
2.3 控制算法实现
传统PID算法存在参数整定不良、超调大、适应性差、控制性能不佳、干扰后调整时间长、稳态误差大等问题,不适用于精量播种系统调节,并且由于噪声的影响,控制器的参数难以自动调节,不能达到理想的控制效果。在传统PID控制系统中添加极小极快无量纲高斯白噪声后,并选取其调节参数分别为10、5、1,其MATLAB中Simulink控制模型搭建和仿真结果如图5所示,可以看出,此时由于微分项的影响,在系统达到稳定值后处于高频波动状态,不利于电机反馈控制,难以实现精量排种。
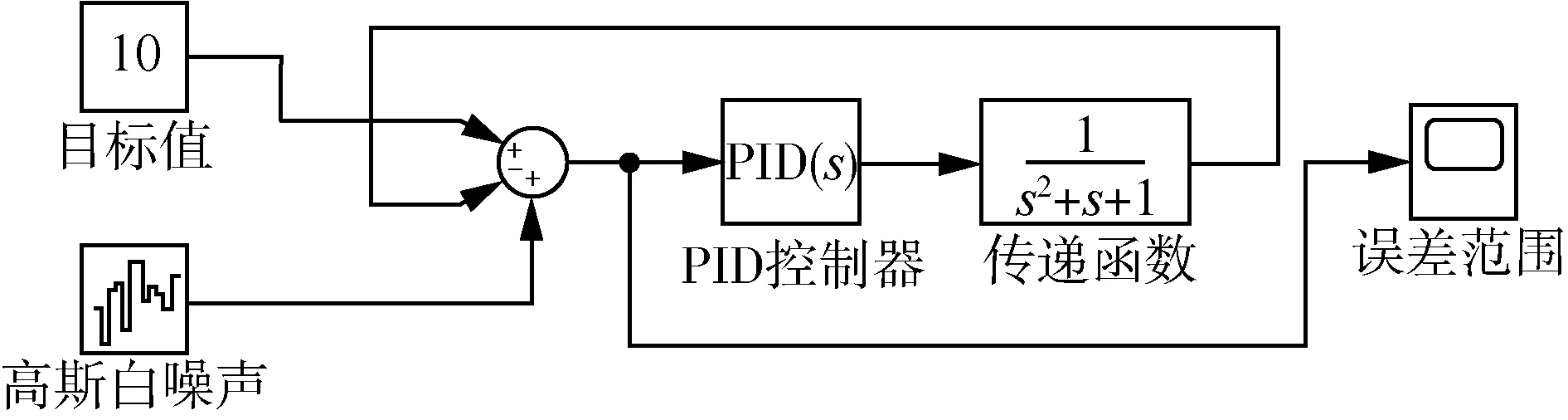
(a) Simulink控制模型
卡尔曼滤波是一种高效率的递归滤波器,它能够从一系列的不完全及包含噪声的测量中,估计动态系统的状态。其可以在贝叶斯滤波的基础上做出如下假设,其中,式(8)为预测方程,式(9)为观测方程。
XK=FXK-1+QK
(8)
YK=hXK+RK
(9)
式中:QK——预测噪声,QK服从高斯分布;
RK——观测噪声,RK服从高斯分布。
根据贝叶斯滤波的预测步和更新步方程可计算出卡尔曼滤波的预测步和更新步方程为
(10)






K——卡尔曼增益。
对传统PID控制器进行卡尔曼滤波融合后,在MATLAB中编写控制程序并在Simulink中搭建控制模型完成仿真测试,其控制仿真模型如图6所示,系统响应结果如图7所示,由结果可以得出,采用卡尔曼滤波后,对于相同量级的高斯白噪声干扰,其信号的谐波幅值明显降低,稳定性提高,趋近于理想信号。显然,卡尔曼滤波的引入,对干扰起到了抑制与降低,表明该系统有着较好的噪声抑制能力,这对于电机精确控制及排种器精量播种的实现起到了关键作用。
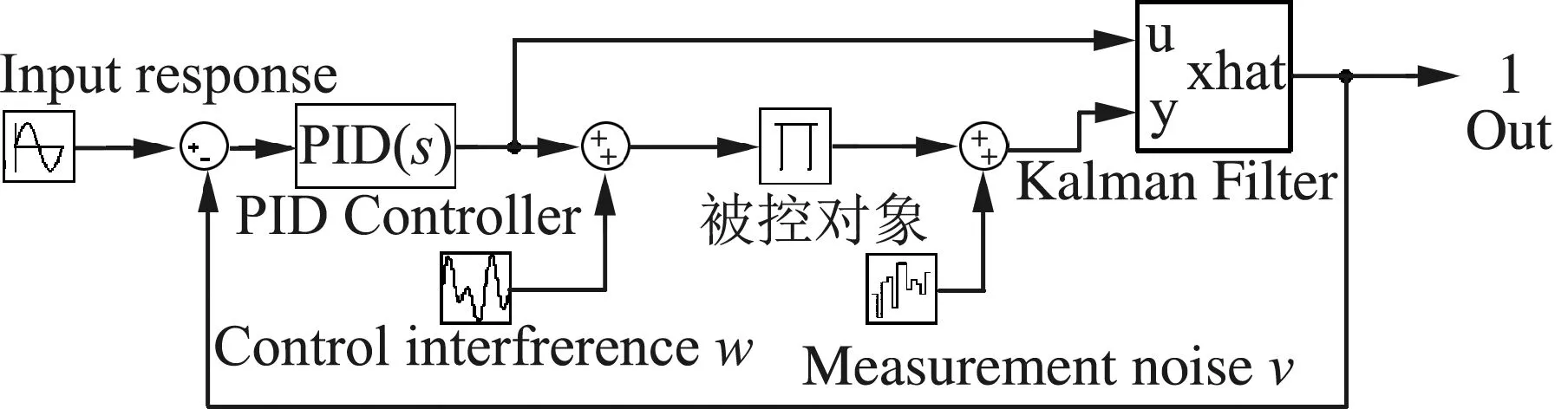
图6 控制仿真模型

(a) 融合卡尔曼滤波前
3 排种试验
3.1 评价指标
试验选取设施蔬菜种子中具有代表性的丸粒化黄瓜种子,千粒质量为28 g,含水率为7%。根据GB/T 6973—2005《单粒(精密)播种机试验方法》规定的试验方法和指标,选取株距合格率、重播率、漏播率和株距变异系数作为排种性能评价指标,进行设施蔬菜智能精量播种机排种试验评价。
1) 株距合格率
(11)
式中:n1——株距合格数;
N′——区间数。
2) 重播率
(12)
式中:n2——重播数。
3) 漏播率
(13)
式中:n0——漏播数。
4) 株距变异系数
(14)
(15)
C=σ×100%
(16)
式中:C——株距变异系数,%;
σ——标准差。
3.2 试验方案与结果分析
3.2.1 单因素试验
通过实地调试,确定排种盘转速和播种机行走速度是影响设施蔬菜种子株距水平的主要因素。搭建排种试验台架,如图8所示。

图8 台架试验图
为了得到理想稳定的株距水平,在排种试验台上对排种盘转速和作业速度进行单因素试验,确定排种盘转速20 r/min、行走速度2 km/h 为排种器单因素试验初步优选值。
3.2.2 正交旋转多因素试验
为寻求排种盘转速和作业速度两个因素对于株距水平影响的最优参数组合,以株距合格率、重播率、漏播率和株距变异系数作为评价指标,进行两因素五水平二次回归正交旋转组合试验。根据单因素试验结果确定试验因素水平设置,试验因素水平编码表如表1所示,试验方案及试验结果如表2所示。
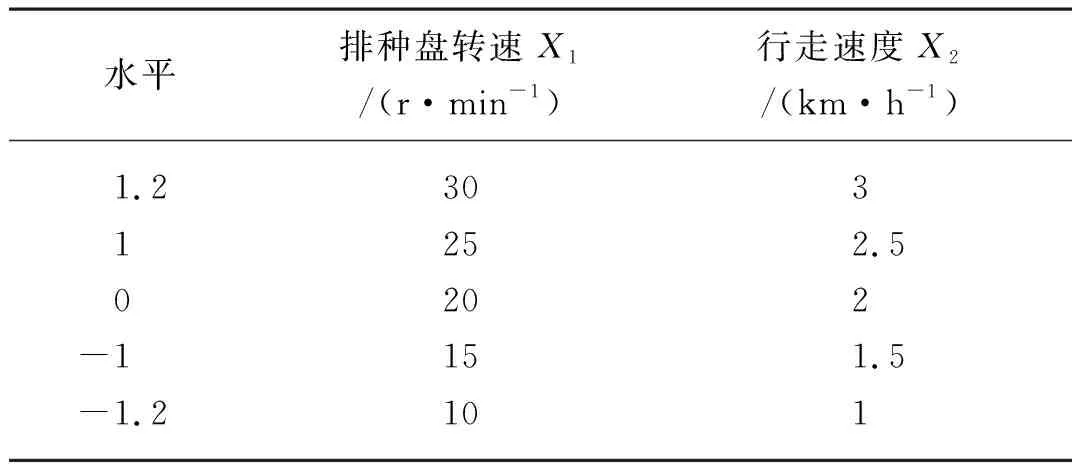
表1 试验因素水平Tab. 1 Experimental factors and levels
运用Design Expert 8.0.6软件对试验结果进行方差分析,并进行多元回归拟合,得到株距合格率Y1、重播率Y2、漏播率Y3和株距变异系数Y4各试验指标的回归方程。其方差分析结果如表3~表6所示。
Y1=94.91-0.57X1-1.59X2+0.13X1X2-
0.31X12+0.38X22
(17)
Y2=2.47-0.20X1-1.20X2+0.019X1X2-
0.12X12-0.30X22
(18)
Y3=2.88+0.21X1+1.40X2-0.15X1X2-
0.20X12-0.077X22
(19)
Y4=14.43+0.77X1+2.10X2-0.59X1X2-
0.42X12-0.55X22
(20)
由表3~表6的回归模型方差分析结果可知,四个回归模型的P值均小于0.000 1,表明回归模型高度显著;在试验因素中,由排种盘转速和行走速度的P值可判断行走速度相比于排种盘转速对4个试验指标的影响更为显著,株距合格率、重播率、漏播率和株距变异系数回归模型中的P值均小于0.05,表明4个回归项在回归模型中交互影响显著。对于重播率Y2,回归项X22也影响极显著;对于株距变异系数Y4,回归项X1X2也影响显著。四模型的决定系数R2均接近1,变异系数分别为0.83%、0.96%、0.95%、0.87%,说明该株距合格率、重播率、漏播率和株距变异系数拟合回归模型具有较高的可靠性。
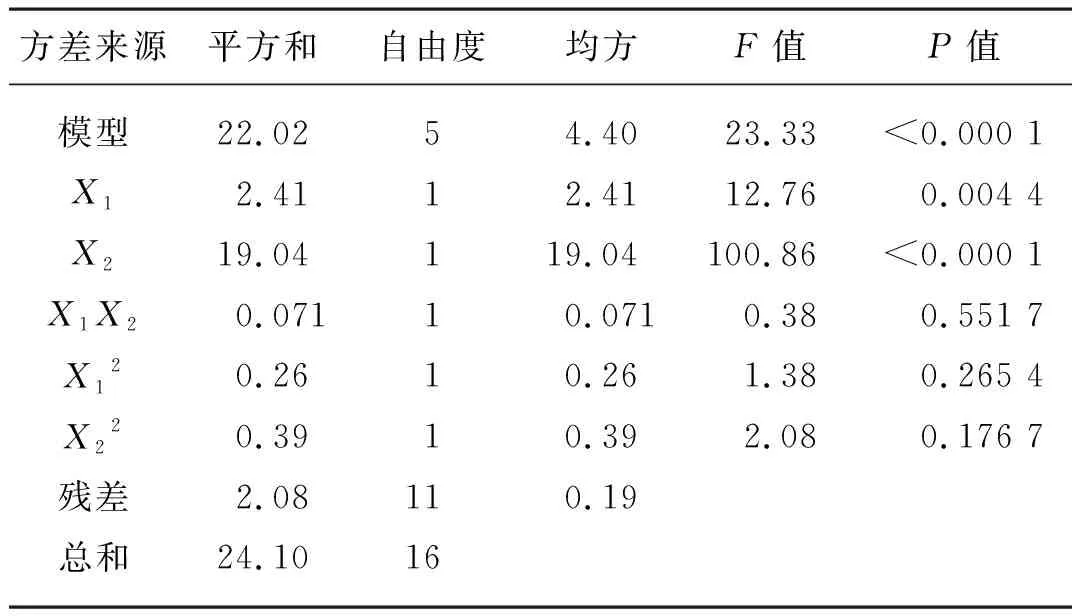
表3 株距合格率方差分析Tab. 3 Variance analysis of qualified rate of plant spacing
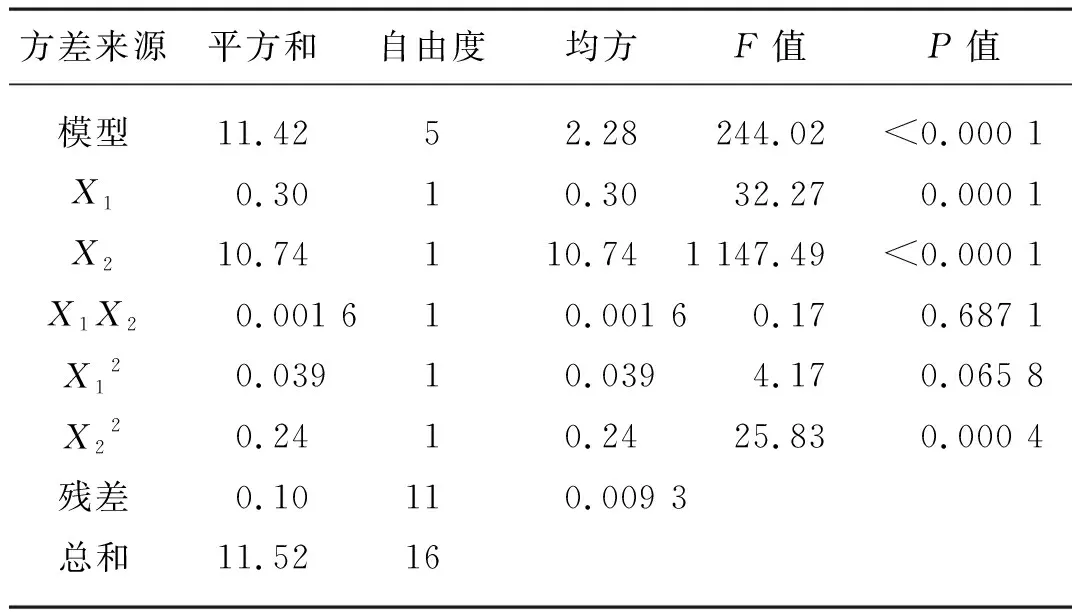
表4 重播率方差分析Tab. 4 Variance analysis of multiple rate
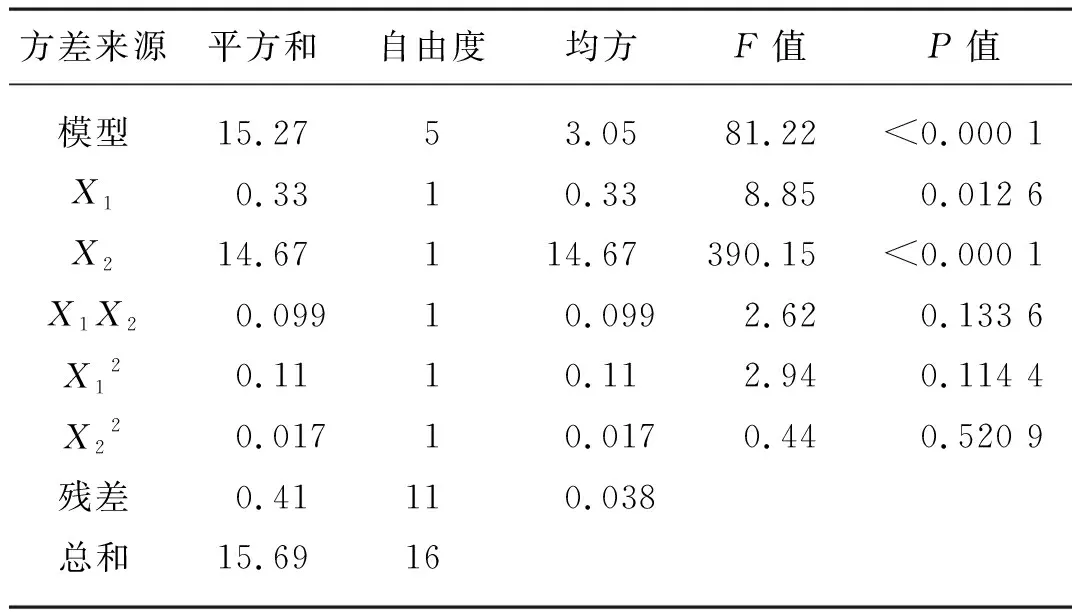
表5 漏播率方差分析Tab. 5 Variance analysis of missing rate
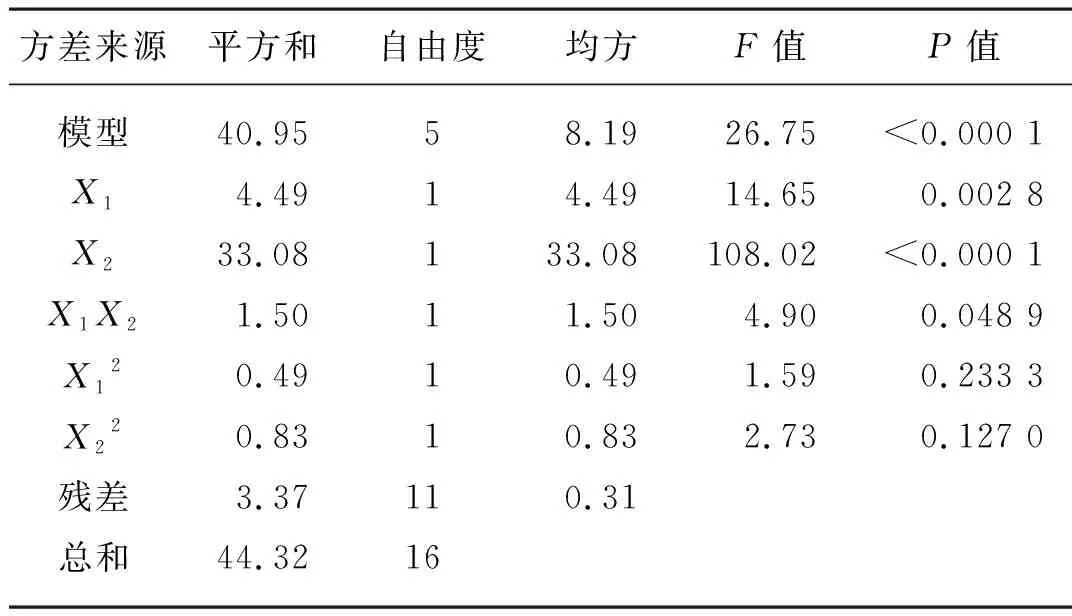
表6 株距变异系数方差分析Tab. 6 Variance analysis of coefficient of
经过数据处理和分析,通过Design Expert 8.0.6软件得到各因素对于试验指标的响应曲面。排种盘转速和行走速度对株距合格率、重播率、漏播率和株距变异系数的响应曲面分别如图9~图12所示,行走速度由1 km/h提高到3 km/h过程中,排种盘转速越快,株距合格率和重播率越低;当行走速度由快变慢时,株距合格率和重播率随着排种盘转速的减小而提高。当排种盘转速由10 r/min增加到30 r/min过程中,行走速度越高,漏播率和株距变异系数越高;当排种盘转速由高变低时,漏播率和株距变异系数随着行走速度的减小而减小。
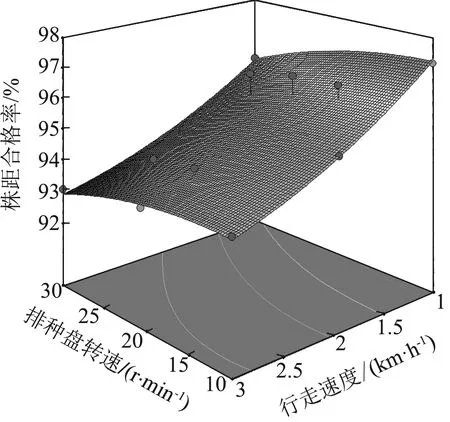
图9 株距合格率指数的双因素响应曲面
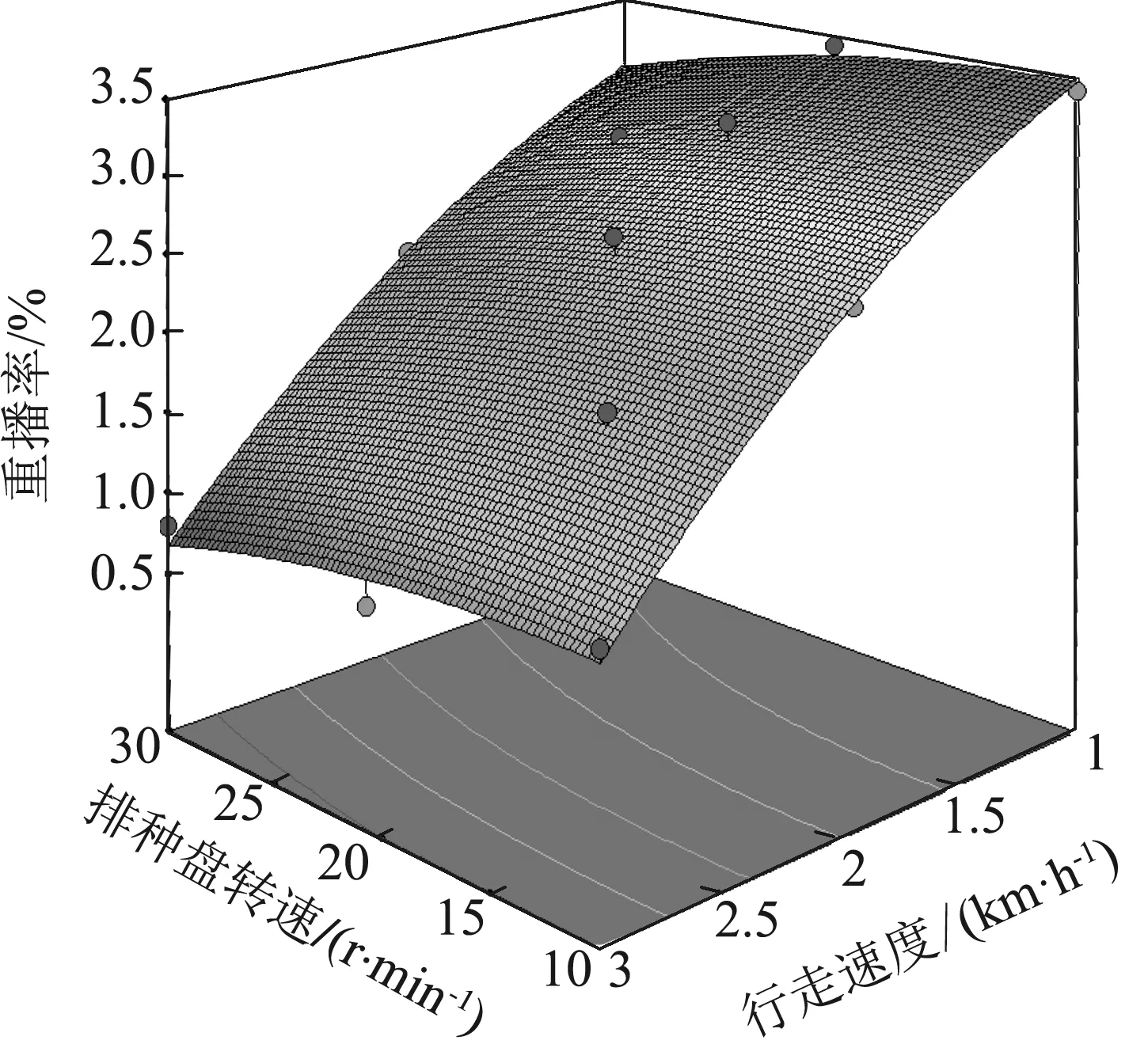
图10 重播率指数的双因素响应曲面
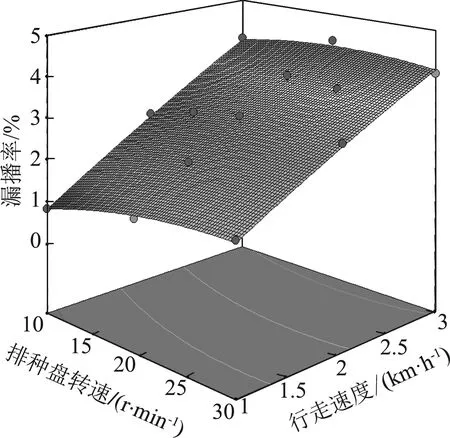
图11 漏播率指数的双因素响应曲面
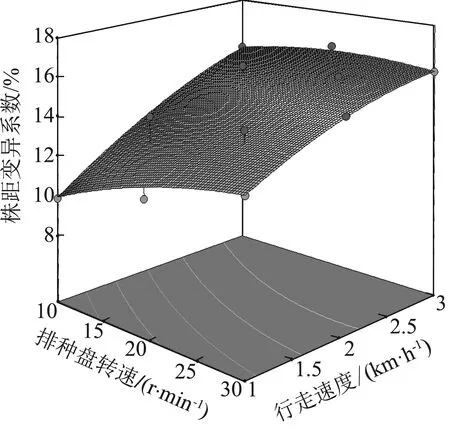
图12 株距变异系数指数的双因素响应曲面
随着行走速度的提高,株距合格率和重播率呈下降趋势,而漏播率和株距变异系数呈上升趋势;在同一设定速度下,随着排种盘转速的提高,株距合格率和重播率呈下降趋势,而漏播率和株距变异系数呈上升趋势。排种盘转速一致时,行走速度减小,重播率的增幅较大;行进速度增大,漏播率的增幅相对较大。基于交互效应分析可知,排种盘转速和行走速度同时减小时,株距合格率指数、漏播率指数和株距变异系数指数显优;排种盘转速和行走速度同时增大时,重播率指数显优。
3.3 参数优化
为了得到各试验因素的最佳水平组合,运用Design Expert 8.0.6软件中的Optimization功能对回归模型进行求解,以株距合格率最大、重播率最小、漏播率最小、株距变异系数最小为条件,求解模型得到的排种盘转速为10 r/min,行走速度为1.6 km/h时,满足上述条件,其株距合格率为95.9%,重播率为2.9%,漏播率为1.9%,株距变异系数为12.1%,均符合标准规定。
4 结论
1) 针对设施蔬菜排种器存在的漏播、重播、精度低等问题,对排种器装置进行了结构和控制系统优化设计,利用步进电机直接驱动排种器进行排种作业,通过控制系统实现精量播种,实验得出影响设施蔬菜精量播种的主要因素为排种盘的转速和机具的行走速度。
2) 对传统PID控制器进行优化设计,融合卡尔曼滤波,仿真结果表明,其可以有效减少噪声对电机的干扰,对提升系统控制过程的平稳性起到重要作用。
3) 通过分析排种盘转速和行走轮行走速度对排种质量的单因素试验,得到理想排种质量的各参数合理变化范围:排种盘转速为10~30 r/min,行走轮行走速度为1~3 km/h。
4) 采用两因素五水平正交试验,建立各个因素与评价指标间的回归模型,得到影响株距合格率、重播率、漏播率和株距变异系数的因素为:行走速度>排种盘转速。确定最佳参数组合:当排种盘转速为10 r/min,行进速度为1.6 km/h时,株距合格率为95.9%,重播率为2.9%,漏播率为1.9%,株距变异系数为12.1%,满足设施蔬菜的精量播种要求。
猜你喜欢
中国农业文摘-农业工程(2022年5期)2022-11-23
农业工程学报(2022年6期)2022-06-27
农业工程学报(2022年6期)2022-06-27
农业工程学报(2022年5期)2022-06-22
新疆农机化(2022年1期)2022-03-02
农业技术与装备(2021年3期)2021-12-01
今日农业(2020年22期)2020-12-14
农民致富之友(2019年22期)2019-08-16
农民致富之友(2019年16期)2019-07-01
农机使用与维修(2014年5期)2014-09-23