
一体化海洋监测系统调试技术研究与应用
2022-10-26 07:47宋健辉朱万林
机电设备 2022年5期
宋健辉,朱万林,高 勋,田 伟,张 磊
(海洋石油工程股份有限公司,天津 300452)
0 引言
一体化海洋监测系统(Integrated Marine Monitoring System,IMMS)主要用于监测、记录和显示海洋环境参数如气隙、海流剖面、风速风向、波高波向和空气温度湿度压力等信息,以及平台的位置、6自由度运动等,同时,该系统还将与立管监测系统、锚链监测系统和压载控制系统进行数据交互。
1 系统构成
1.1 子系统
一体化海洋监测系统子系统如下:
1)环境监测系统。
2)装载管理程序。
3)系泊监控系统界面。
4)SCR监控系统界面。
5)压载控制系统界面。
6)辅助靠泊系统界面。
1.2 硬件采集系统及盘柜
硬件采集系统以西门子S7-400H系列可编程逻辑控制器(PLC)为核心,分别采集具有开关量/模拟量IO的就地仪表、具备总线通信功能的智能仪表和具有独立控制器的独立系统3部分数据,并通过PROFINET上传至上位机电脑,可供多台电脑同时读取[1]。系统主要结构见图1。
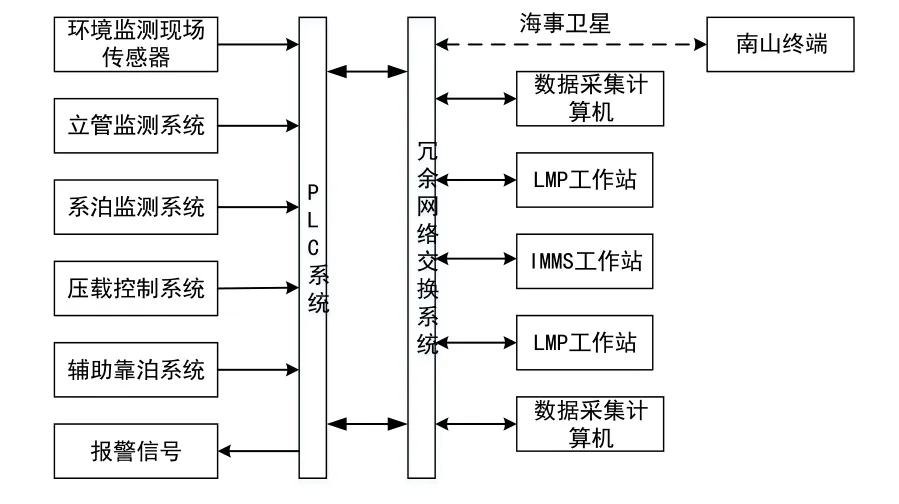
图1 系统构成
2 IMMS 系统调试
2.1 环境监测系统调试
1)确定风速风向仪、温湿度传感器、大气压力传感器、能见度传感器、水温和盐度传感器、波浪雷达、气隙传感器、声学多普勒海流计、差分全球定位系统(GPS)、运动参考单元等传感器和设备安装完成。
2)传感器通信测试,测试前对PLC采集系统和外部传感器进行正常供电,安装IMMS工作站、启动IMMS系统软件,检查软件中各传感器采集数据是否正常显示,见图2[2]。
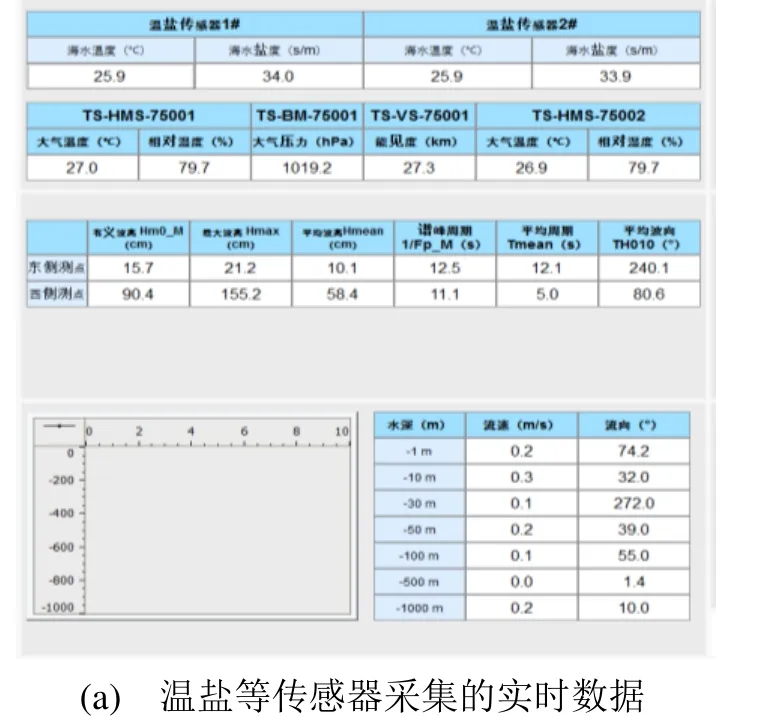
图2 IMMS 系统各传感器测试数据
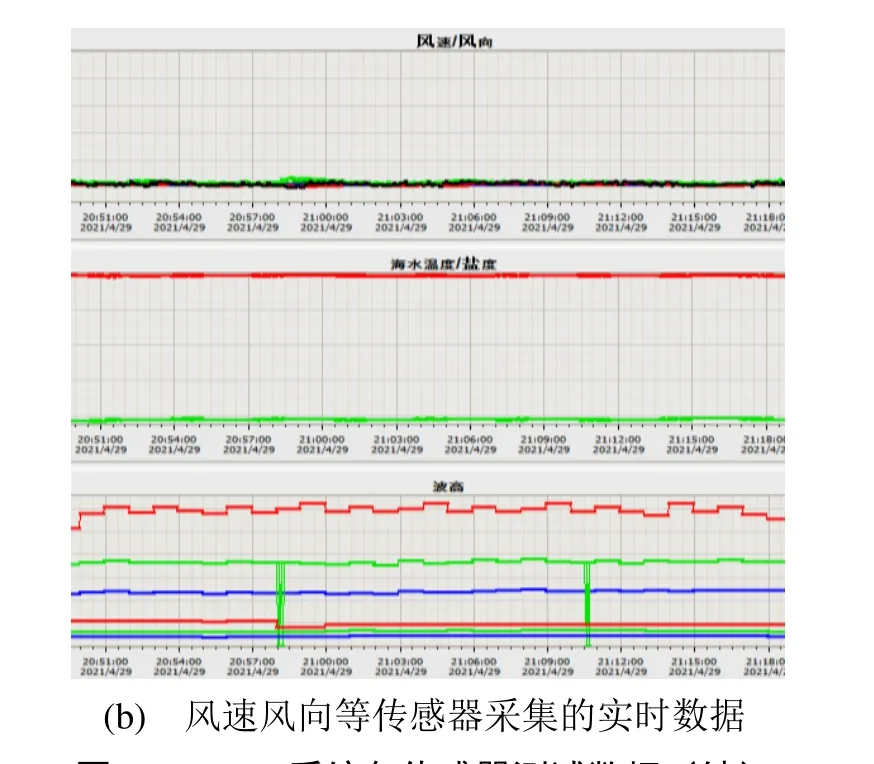
图2 IMMS 系统各传感器测试数据(续)
2.2 装载管理系统调试
装载管理程序包括2台专用的装载计算机,可以实现以下功能:
1)质量控制。根据当前压载舱探测液位高度,甲板载荷以及系泊,立管载荷等报告实际装载状况。能够通过手动输入压载舱液位高度,甲板载荷等手动模拟压载状态。输出基本静力学特性,并将实际垂向重心VCG(包括自由表面校正)与允许的VCG进行比较[4]。
2)稳性计算。完整稳性或者破舱稳性进行计算,完整稳性状态下计算VCG并与允的许VCG比较。破舱稳性状态下,可以选择破损舱室计算稳性曲线并与规范校核。
3)压载建议。根据平台舱室装载、甲板荷载、系泊和立管荷载及作业限制条件,提供实时的压载建议。
4)输出水动力特性以及4个立柱的吃水,包括排水量、可变荷载、吃水、纵倾/横倾、VCG/静稳性力臂GM和自由表面修正、初稳性高度Gz曲线等。
5)能够跟踪和记录平台质量变化以及平台修改情况[3]。
装载管理软件界面见图3。
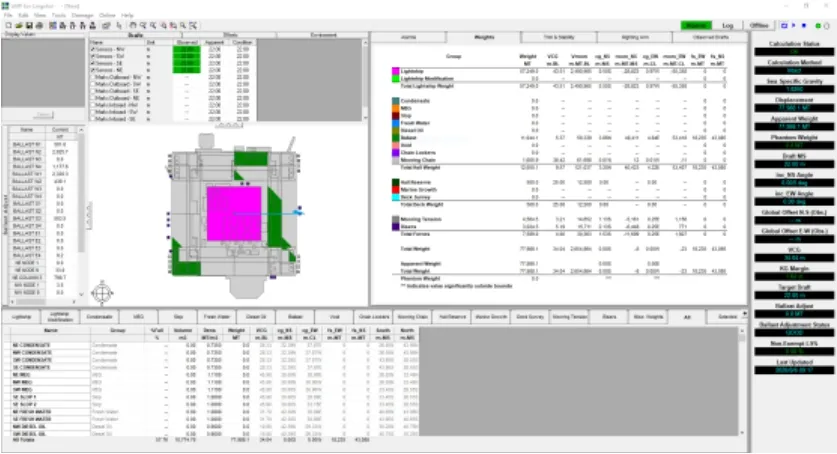
图3 装载管理软件界面
2.3 其他系统交互数据调试
系统读取压载控制系统的舱室和液位、立管监测系统的张力和角度、锚链监测系统的张力和角度等数据进行总质量、重心、可变质量、船体稳性、横倾/纵倾等负载管理计算,见图4[5]。
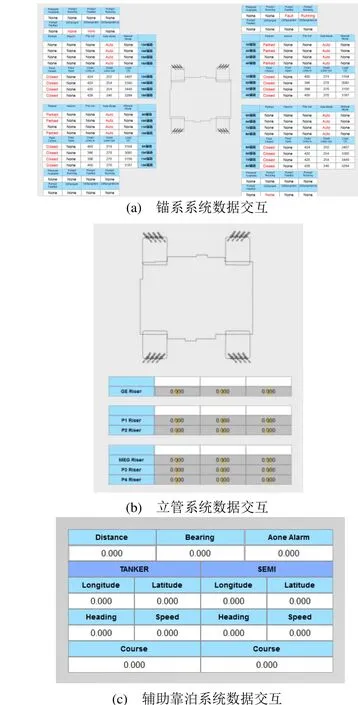
图4 其他系统交互数据调试
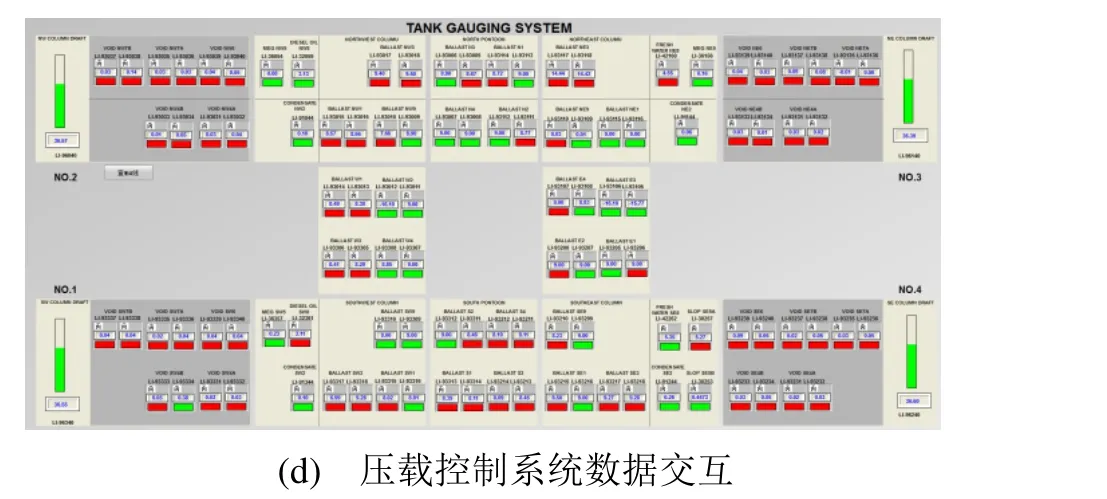
图4 其他系统交互数据调试(续)
3 结论
IMMS系统所有传感器经过测试,与控制系统之间的通信正常,各项数值可靠,实现了监测、记录和显示海洋环境参数的任务目标。另外,平台的位置、6自由度运动等数值显示正常,为后续周边开发提供可靠的海洋环境数据,并能够对所有船体压载舱室的液位实时监测,应用装载计算机计算压排载数据,成功实现了指导压载系统操作,与其他各系统的数据交互也测试成功,整体IMMS系统调试成功完成,并顺利交付。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年10期)2022-06-17
建材发展导向(2019年11期)2019-08-24
舰船科学技术(2016年1期)2016-02-27
Beijing Review(2015年43期)2015-11-25
西南石油大学学报(自然科学版)(2015年5期)2015-04-16
舰船科学技术(2015年8期)2015-02-27
天津职业院校联合学报(2014年2期)2014-09-20
船海工程(2013年6期)2013-03-11
船海工程(2013年6期)2013-03-11
