预测心智的三种理论模型:一个比较性研究
2022-10-26 05:57朱林蕃
哲学分析 2022年5期
朱林蕃 刘 闯
一、导论
心智的预测加工(Predictive processing of mind)理论最近十年在国内外学术界产生了深远的影响。该理论的哲学视角研究者倾向于分析霍威(Jakob Hohwy)为代表的联结主义预测加工模型(connectionist account of predictive processing)与克拉克(Andy Clark)为代表的具身认知的预测加工模型(embodied predictive processing)之间的理论分歧。概括地说,联结主义的预测加工模型希望通过多层级预测通路的分析,提出一种建立在贝叶斯预测基础上的、借助主动推理(active inference)的有限采样预测模型;而与此相对,具身的预测加工则更加强调身体行动与本体感受对颅内贝叶斯预测的深刻影响,并认同一种基于行动主动性的身体与脑耦合联动策略的预测模型。与之前的大多数学者不同,本文在试图比较以上两种模型合理性之前,加入一个新的视角来分析——笔者认为,在预测加工模型出现之前,福多(Jerry Fodor)与卡拉瑟斯(Peter Carruthers)的心智模块假说(the modularity of mind)和大规模心智模块架构(massivemodularity of mind)或已经为人类的预测功能的机制刻画留出空间,当然也存在着许多不足。基于认知主义的预测模块策略(cognitivist account of modularity theory of prediction)并不认为感知与认知是密切联系的,而坚持感知单元与认知的分隔,预测功能存在于中央处理系统中的一个局部模块等。由于引入新的视角,我们希望通过回顾与理解这种架构的独特性,以引领我们重新思考预测加工的“史前史”,并帮助解决当今的理论困境。因此,本文的重心在于通过分析认知主义预测模块策略的优缺点,以及心智的模块预测策略与联结主义预测架构的比较分析,来帮助我们进一步理解为何具身认知的预测加工模型超越前面二者,成为解释人类预测行为的最优模型。
基于这个判断,本文必须解答如下两个问题。首先,如果福多与卡拉瑟斯的模块假说策略可以与预测加工实现兼容,这种兼容可以在多大程度上解释现有预测加工模型提出的问题;如果不能,我们将分析它的不足之处。其次,我们借鉴对认知主义预测模块策略的分析,进一步尝试说明霍威与克拉克两个版本的预测加工模型中,哪一种更具备有理论说服力。
二、对认知主义心智模块假说理论的回顾及对预测模块策略的探索
认知主义(cognitivism)在过去三十年间不断被各种进路的具身认知理论挑战,但今天的认知科学理论与相应的哲学解释仍然不断在过去的遗产之上进行新的创造。认知主义核心假说,是将人的认知过程等同于中央信息处理过程,那么信息加工之前的信号输入过程等同于人的感知、信息输出过程等同于行动——这就等于将人类的感知、认知与行动视作彼此分离的三个单元:认知是二者的信号中介,负责将感知信号通过表征的和计算的方式进行符号计算与句法结构重组,并输出到行动单元。这种将感知、认知与行动的三分结构被哲学家赫利(Susan Hurley)称作所谓认知的“经典三明治”(classic sandwich)。
在这个结构的基础上,福多进一步发展出心智模块假说。假说基本内容是将一般系统信息加工模式与人类认知系统的信息加工模式进行类比:一个宏观的系统信息处理过程,可分解为由一系列子系统完成的二级处理过程。这使得人类心智的机制按照模块化的架构进行解释。福多版本的心智模块假说认为人类心智的模块化存在着一系列特征(properties),比如,心智模块存在是人类先天的能力与构造,模块为了使得信息加工得到准确地传递而不受到大脑其他部位信号的影响,特定信号必须在经过感知系统输入之后,在内部系统中被特定心智模块处理并封装(encapsulation)传输,并在此基础上进行加工(例如,福多会认为,一个视觉加工过程,不应该受到听觉信号的影响。视觉信号与听觉信号之后在中央处理系统中综合)。从信息封装的加工过程角度看,它体现了人类心智的信息处理的特征:心智模块一经接收到感知觉信息单元的刺激或信息输入,模块需要进行快速处理,并形成一系列“浅”(shallow)输出到行动单元(复杂信息会因为需要的计算成本过高而信息过载)。这就是说,心智模块假说要求信息处理的过程具有强制操作、快速处理和浅输出特征。从特定功能模块的处理方式看,模块处理具有解离性(dissociability)、在地性(localization)和特定领域(domain specific)特征。特定领域与在地性是说,特定感知觉信号只被分配到特定的功能(特定神经)模块中处理(例如,听觉信号只会在听觉单元中处理,视觉信号也只会在视觉单元中处理);而解离性是说,即使心智中某些模块功能失效(malfunction),并不影响整体模块的信息处理(例如,色盲患者仍然可以通过模块处理其他视觉信息)。
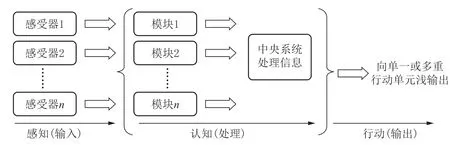
图1 基于福多心智模块处理的图示(括号内为中央处理系统)① Max Coltheart,“Modularity and Cognition”,Trends in Cognitive Sciences,Vol. 3,No. 3,1999,p. 116.
根据上图所示,福多版本的心智模块理论不仅具备信息封装、先天处理、强制操作、快速处理、在地性、解离性、特定领域、中心不可访问等特征之外,还比较明确地认为感知单元与行动单元在身体系统中,而与感知与行动相互分离的认知单元在颅内的脑与中枢神经系统中。科尔塔特(Max Coltheart)后来在回顾福多的遗产的时候,强调了福多并没有坚持心智处理需要满足模块的“全部”特征,而只需要满足其中一部分即可。福多在模块特征问题上的让步,已经为后福多(post-Fodorian)心智模块理论提供了改造基础。
后福多的心智模块理论的初衷是想解决福多式模型的一些难题,以适应与刻画大规模心智任务与信息处理的解释。后来的哲学家与认知科学家对福多版本存在两个担忧,一方面,卡拉瑟斯等人认为,不仅边缘神经(输入系统)应当采取模块化解释,中央处理系统也应当是模块化的;因为心智系统应该由多个专门系统来组成,而不应采用通用的中央系统,这样可以更有效和快速地处理信息。另一方面,出于进化心理学的考虑,复杂系统的适应性总是不如多样化的子系统适应性更强,出于对进化的考虑,子系统(模块)的进化可以更好的解释心智在进化中的历史性过程。
后福多的大规模模块理论为解释人类预测问题提供了理论上的可能性。如果福多式的通用中央系统被具体的信息处理模块取代,那么许多认知科学的理论模型也可以通过模块化示例来呈现。我们不妨借助下面这个图来说明那些可能支持模块假说的认知科学家在试图解释人类心智中的预测过程的时候会采用的策 略。通过在上图中对于认知主义模块学说对预测加工的可能性观点的图示化展示,我们或许可以总结出下面一些特征:

图2 后福多大规模认知单元对人类预测过程示意图(括号内为中央处理系统)
(1) 在认知主义预测模块架构中,不仅感受器、效应器与代表认知加工的中央处理系统分开;认知过程内部的通用中心处理模块,也被大规模模块所替代。
(2) 在信息处理过程中,大规模模块在预处理单元将信息进行区分(即将不同的信息进行分拣,体现了模块的“特定领域”特征),对待信息处理与传输采取“宽域封装”(wide-scope version of encapsulation)的方式。福多式的窄域封装本是想说明脑内认知系统的一个信息处理过程完全不被其他脑内子系统的信息干扰。而宽域封装则尽可能保证一个信息过程不被头脑中大多数信息影响,但仍然会有一些其他模块参与到操作中。比如在一个“感知—预测—行动”的信号过程中,学习与记忆模块可能会将之前已经存储的知识内容作为预测的前提(例如,“红灯停”这个规则不需要每次单独学习和预测,而是借助学习与记忆模块来处理的)。这一点也被称作基于模块的(model-based)策略。
(3) 根据(2)所提示的特征结合图中所示,预处理单元将信号分别传输到两个主要的信息回路中:A回路组成的无先验模块(model-free)策略的回路(空心方框组成)与B回路基于模块(model-based)回路的学习模块、记忆模块与预测模块(实心方框组成)。
A回路:计算处理单元通过预处理单元直接给定的信息进行封装加工,并向预测模块输出信号并最终输出大效应器,或者直接以无预测方式向效应器提供简单加工输出。
B回路:基于学习与记忆模块中先验策略的信息回路在实现信息基本加工后,传输信号到预测模块,并最终输出到效应器中。B回路中,预测模块为学习模块提供部分信息反馈,从而形成预测式知觉渗透。
(4) 预测模块与正常经过计算加工的信息模块都可向效应器输出行动指令。预测单元既可加工“预处理单元”直接给出的信号并发出预测指令(例如,躲避危险),也可以加工经过审慎计算过的复杂信息(计算加工后的行动决策,或者基于学习、记忆模块的预测行为指令)。
而综合以上特征,我们或许也可以看到一个“刻板印象中的”认知主义版本预测模块假说存在的一些问题。首先,上图所示的认知主义版本的预测加工模型在经过计算处理直接输出的无模块化处理与基于学习与记忆的模块化的处理之间似乎存在两个输出路径,却没有说明两个路径的信号之间如何通过正负加权从而将运动信号准确地输出到行动单元。其次,以上模型中缺乏信息反馈回路,以纠正由突发风险事件引发的惊讶(surprise)和认知错误(cognitiveerror)。由于以上两点均在后来的联结主义的或者具身认知的预测加工理论中得到解决,或许有人会将认知主义模块学说视作稻草人(strawman)学说而将其简单化。简单化的批评对于知识是有害的。因此,我们将在下文说明,在联结主义与具身认知的预测加工理论出现之前,认知主义者如何在决策加权与反馈回路这两个层次作出修正努力。
三、认知主义心智模块对预测模块策略的深入探索与不足
根据上文我们可以看到,遵循认知主义模块学说可以对人类心智的预测行为作出初步的探索性与示例性的研究,但是这些研究仍然存在着难以解决的困难,特别是无预测的“感受器—(预处理—计算)—效应器”回路与预测模块发挥功能的“感受器—[预处理—学习(±记忆)—预测]—效应器”回路之间存在着两个信号输出时出现的信号冲突现象,以及在信息处理中缺乏感知信息反馈的难题。不过,也如上文所说,认知主义并不(总)是忽略信号加权与信息反馈的作用。比如弗里斯顿(Karl Friston)在一项研究中重新回顾了认知模块对于信号加权与评估系统的装置。在早期的比较器运动编码研究中,研究者试图将策略预期反馈与实际感觉反馈进路的信号进行加权处理,并通过这种处理来实现机器手臂模拟人类手臂活动的控制性问题。(见图3)

图3 一个早期的基于比较器运动控制编码研究示意图。② R. Chris Miall & Daniel M. Wolpert,“Forward Models for Physiological Motor Control”,Neural Networks,Vol. 9,No. 9,1996,p. 1267.
从图3可见,此版本示例运动指令与指令输出的内部模块架构,本模型示例具有以下特点:
(1)内部模块按照预期回路与感觉现实回路两个路径相对独立传输,并在输出端进行信号差加权。预期回路不受到外部状态影响,仅反应运动指令信号的预期;而运动、感觉系统回路受到外部信号影响,会产生新的感觉信号。
(2)运动指令同时向运动系统—感觉系统模块输出一个现实反馈信号,同时向正向动态模块输出副本信号作为感觉预期。两条信号的加权结果即预期与现实感知的差,差值越高说明预期吻合越少,带来的认知惊讶越多(风险也就越多),而需要在行动单元花费更多认知能量,使得预期符合运动感觉系统的实际效果,并调整姿态来减少因为意外的外界输入带来认知风险。
(3)两组信号在拟合系统最后作出加权与评估,并最终实现对机器手臂的精准控制。
机器手臂的预测回路与实际感知回路的双向拟合,与最终信号校准使得认知主义模块理论中记忆学习模块中存储的预测结果,与感知觉反射的信号输出出现的信号源冲突与误差问题得到了解决。而福多与卡拉瑟斯或许也会同意信号校准与加权的模块可以作为认知性预测活动的一部分,即以下面的图例呈现:
从图4我们可以看出,在加入信号源校准与加权评估装置之后,似乎预测行为可以在认知主义模块学说的范式下得到一种解释与呈现。不过这种呈现仍然面临着最近十年来联结主义的预测加工理论的挑战。在解释新的预测加工模型之前,我们不妨稍微总结一下改进后的预测模块与心智架构理论共同拥有的一些特征与问题。

图4 后福多大规模认知单元对人类预测过程示意图(改进版)
首先,认知主义版本中的预测模块策略是一个建立在 “感知—认知—行动”三阶段的非连续性(non-continuity claim)基础上的解释模型。而联结主义与具身认知的预测加工模型均试图挑战这种“认知三明治”架构,而采取更加连续的方式将感知、认知与行动视作密切相关、互相嵌套的层次的认知架构。
其次,大规模认知模块假说采取了内部功能单元分离(isolation claim)的认知架构,这种架构基于一种假设,即人类大脑新皮层是严格按照功能分区而分布的。而自从认知神经科学的全局工作空间理论(Global workspace theory)出现以来,许多科学家认为,人的决策、注意力、评估等认知活动是一种全局可用性(globally available)的组织方式,任何一个颅内信息处理都会调用神经空间内相当部分的脑资源,而不仅仅是单一的本地模块(local model)。显然,在后来的联结主义预测加工模型中,这一点也成了其理论的重要内容。
最后却并非不重要的一点,在认知主义策略下的预测模块体现了一种依赖于被动的感知输入的模型,这种模型必须渴求外界输入的感知强度(perceived intensity)作为先天条件。而后来的联结主义或具身认知的预测加工模型则认为人的预测是一个主动与被动相结合的加工过程。
综上,我们可以看出,认知主义的心智模块学说在人类的预测行为方面确实作出了许多探索,但是仍然存在着上面三个似乎无法回避的争论点。我们在下一节将着重讨论联结主义与具身认知预测加工模型的形式与这三个关键争议的答案。
四、联结主义与具身认知预测加工模型对认知主义预测模块的超越
在过去十年间,基于弗里斯顿最先提出的将人类预测行为与多层级神经结构与贝叶斯算法相结合的神经科学假设,霍威与克拉克分别提出了不同版本的预测加工模型。霍威倾向于作出一个联结主义版本的预测加工解释,而克拉克则从具身认知背景提出了具身认知版本的解释。本节我们将对这两个不同视角的解释分别作出分析与介绍。
(一) 联结主义预测加工模型
霍威的联结主义预测加工是基于弗里斯顿和弗里斯(Chris Frith)等神经科学基础上的认知科学诠释。在霍威看来,预测加工是一种基于脑全局工作的亚人格层面(sub-personallevel)的贝叶斯推理预测过程。由于这种推理过程仅仅关于无意识推理决策,而不是理性化的推理决策,因而并不涉及现象学意识层级的体验,而这种无意识的贝叶斯推理过程在多层级神经系统中起作用。我们将从以下四个侧面解释联结主义的加工模型结构。

图5 联结主义预测加工模型示意图(略修改)① Jakob Hohwy,The Predictive Mind,Oxford: Oxford University Press,2014,p. 68.
(1) 预测加工的动力:自我保存意图下的主动预测。
依照弗里斯顿的解释,生物体可以被看作由皮肤或细胞膜包裹的内稳态(homeostasis)系统,而任何孤立系统都会遵守热力学第二定律自发且持续地耗散能量,并最终由于热量耗散完成,达到热力学平衡而系统崩解,能量在环境中平衡;因而,生命系统具有生存意图,并维持能量不会快速耗散。生存意图使得生命系统通过不断对感受器采样内容进行预测,所预测内容与感知采样内容误差越小,规避可能出现的意外与风险的时间与机会越大。
(2) 预测加工的中心与目的:追寻预测错误最小化的“贝叶斯脑”。
既然生物为了保存自身而需要规避风险,生命系统需要对所处环境的情况作出预测,预测结果与真实情况的差别越小,那么说明该系统有更多时间和能力规避这些风险,从而使得维持系统生存的可能性就越大。所以,生命系统的心智过程包含着努力追求预测错误最小化(predictive error minimization)的过程。
而追求预测错误最小化需要大脑不断借助贝叶斯推断(Bayesian inference)来对感知觉单元向脑内输入的信号进行采样,并将采样结果与内部信念的先验信念进行计算整合,并推测出关于未来事件发生的可能性概率。所有支持预测加工理论的学者几乎都支持人类的脑是一个关于外部事件不断预测的贝叶斯“引擎”。
(3) 预测加工的架构:主被动结合的多层级联结主义。
霍威预测加工模型还借鉴了联结主义神经元多层级架构作为预测加工架构的灵感来源,在他看来,人类神经网络中存在多层级的信息处理,上一级对下一级按照先验信念概率进行主动推理(active inference),与自下向上的后验概率信号输入被动推理(passive inference)的相遇,在任一层级内部产生相应的贝叶斯概率推断,并将推断结果作为下一层推断采样的依据。这样上下信号相遇产生的预测结果不断与外部感知觉输入的信号相遇,为了符合预测误差最小化,各层级会不断调整输入(平衡主动和被动信号)的权重(增强准确的信号精度、抑制干扰),使得预测结果与外部即时发生的事件的情况不断接近,为规避风险的行动提供可能性。
(4) 预测加工的物理实现:自证边界的内部实现。
既然每一层级都基于对下一层级的采样,且采样的基础又是基于感知觉的信号输入,这样一来,似乎采样的根据总是处在感知觉单元与预测处理分隔的边界之上。如果贝叶斯推断中的采样内容都是神经内部的,那么在这些内部计算之外的步骤是(预测)边界之外的。而在现实中,这个预测的采样边界“恰好”与脑的生理边界重合,这样一来,霍威认为,心智的预测加工是一个以脑为边界的内部活动,边界的位置是通过预测过程的内部性而得到自证的。
霍威的预测版本整体上认为预测加工处理并不是脑局部功能区或者模块的作用,而是全脑多层级活动的共同结果,但是他仍然坚持认为认知单元与感知觉单元、行动单元互相分离。而在主动性立场上,霍威强调了自上而下的主动推理与自下而上的被动推理互相结合,但是他并没有说明行动对于采样或者行动者主体的更深层的影响。
(二) 克拉克的具身认知的预测加工:对霍威的批评 。
克拉克的具身认知版本的预测加工基本上认同霍威的整体结构,即关于预测错误最小化、贝叶斯推断和多层级预测加工架构的模型。但是在如上观点之外,克拉克坚持一种具身认知立场下的预测加工模式,即预测加工的过程不应当被理解为颅内狭义的贝叶斯推断过程,而是应当考虑人与环境的广义语境下,本体感受(proprioception)和行动对贝叶斯预测的深刻影响,也就是说,将身体与行动对内部推断的影响非中介化了。
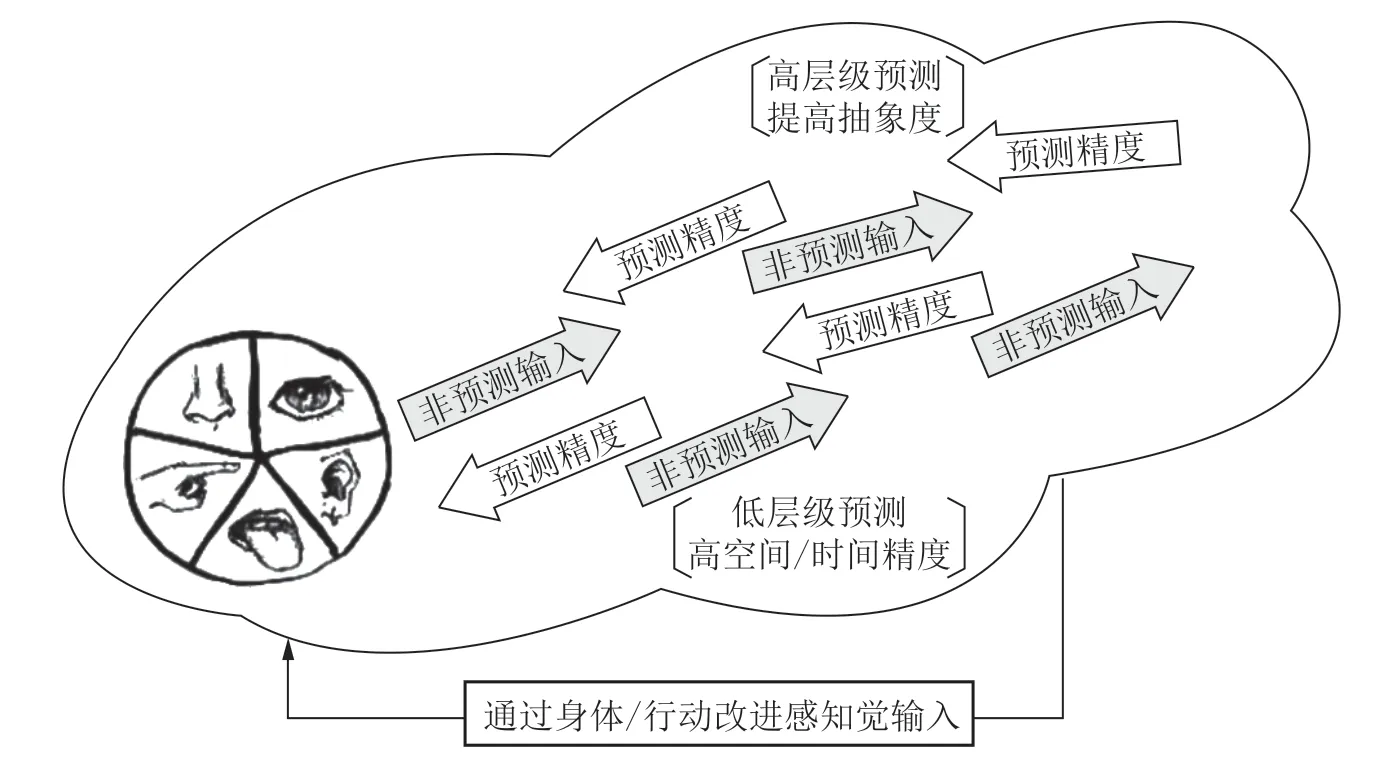
图6 基于身体/行动的广义贝叶斯预测模型(略修改)① Andy Clark,Surfing Uncertainty: Prediction,Action,and the Embodied Mind,Oxford: Oxford University Press,2015,p. 284.
克拉克的架构与霍威的差别主要体现在下面四个不同的角度。首先,克拉克认为,感知与行动对于预测的影响是深刻和连续的。在他看来,主动推理并不仅仅是一个颅内高层级指向低层级的信号指向活动,而是借助内部神经过程与外部复杂的知觉/行动系统(五官感受与本体感受)的双重策略。通过“改变环境适应预测,改变预测适应环境”的方式来获得最经济和有效的预测推断。在这个意义上看,感知觉与行动直接“介入”(embed)到了预测的全过程中。
其次,经由行动积极地缩小误差的策略在霍威的模型中并没有得到重视。在克拉克看来,人类(或某些动物或者智能机器人)可以经过学习从而使本体感受可以策动和实现身体行动,最终通过移动身体和观察角度的迁移达到缩小预测误差的目的。而之所以身体行动介入预测过程而不是全部依赖于神经活动,是因为生命体的生存优势与进化优势在于使用最小的能量获得最大的效益,即认知经济学(cognitive economy)。生命体需要在时间压力下作出最优判断的时候,具身行动(embodied action)的介入使减小预测误差和实现认知目标显得直接和高效起来。
再次,当主体具身行动成为预测与所在环境之间介入因素的时候,在克拉克看来,在贝叶斯推断的过程中,感知与行动不再是预测过程之外的部分,而是被纳入“广义贝叶斯”的过程中。由于每一次贝叶斯推断的过程,不仅仅包含着先验信念与感知觉信号采样本身,也包含着认知主体如何通过行动改变自身状况来改变采样精度符合预测的结果(比如通过登高望远凝视远方获得准确的预测,或者对交通工具有了解的人,将对面好像是车的东西预测为汽车,提前做出躲开的动作以便在相遇的时候更容易作出反应)。又或者说,包含着另一种策略,即通过改变环境来让环境符合我们的预测(为了看得更远、观察更清晰,走上楼梯或者摞起砖块踩上去,等等)。
最后,霍威的内在主义版本往往忽略人类已经存在着的语言与文化因素对于预测的影响,因为其内在主义的特点,知觉到的内容也仅仅是与世界的偶然符合(感知内容受制于采样的方式)。而克拉克坚持认为,预测加工必然伴随着真实世界的认知策略,即人的预测加工被我们自身的语言与文化因素塑造着,而我们又通过历史文化实践塑造和生成了关于世界中(对我们发挥作用的)的因素。社会规则、社群文化、习俗和禁忌等作为我们预测推断时业已存在的先验信念,会影响到预测精度和最终的行为方式。
五、对三种预测模型的哲学再分析
最近几年,德莱森(Zoe Drayson)等后福多心智模块论拥护者在支持心智模块假说兼容某种预测模型的时候,坚持认为:(1)预测或者其他任何认知活动都是在内部神经的局部(模块)完成的;(2)感知、认知与行动单元之间彼此互相隔离;(3)预测活动必须依赖被动性的信息给予后的反应,和其他认知活动一样,预测是被动的,感知之后的。
与此相对,联结主义与具身认知的预测加工理论支持全局加工理论,认为预测活动并不发生在某一单元中,而是全脑神经元的共同作用的结果。但是在感知、认知与行动分离的立场上,霍威的联结主义虽然部分认为行动对预测有积极效果,但是仍认为预测过程是一个颅内加工的过程,狭义的贝叶斯推理边界就是脑边界,与身体无关。而克拉克则立场更加彻底,认为预测加工和所有人的认知活动均是具身的过程。身体与行动不仅深刻影响认知的内容,也积极参与构建了认知的形态与全过程。

表1 三种预测加工模式的差异示意图
无论上面哪种理论模型正确,似乎三种理论最终走到了一个待选或待验证的平台之上,哲学家们除了高声援引亥姆霍茨(Hermann von Helmholtz)或康德与当代理论的相似性之外,似乎显得束手无策,唯有等待科学家(比如弗里斯顿等)的验证才能最终定论。但实际上并不尽然,我们不妨在下文尝试从简单到复杂,作进一步的哲学分析。
首先,反驳关于认知的被动性假说。经典认知主义习惯性地将认知过程理解(或设计)为被动,一方面基于“刺激—反应”的行为主义心理学假说,另一方面是因为表征主义诉求,即只有关于外部的刺激或感知压力(perceived intensities)才有关于外部世界的表征。这样一来,感知单元(感受器)就被视作认知单元的被动从属。将感知视作被动也承载了某种理论的“历史负担”,例如阿奎那也说过“感知不是动,是被动(to be moved)”。不过,将人的身体感知系统也描绘成被动从属,集大成者还是近代机械论和行为主义,既然人是机器或刺激反应对象,那么感知自然也被赋予了被动的属性,这种刻画易于分析却十分违背日常直觉。诺伊(Alva Noë)曾经举过一个例子,当我们看到栅栏后好像有一只猫,但因为栅栏的遮挡,我们仅仅看到部分猫的形象。大多数人当然不会仅靠猜想说那是一只猫,而是凭借感觉运动能力(sensorimotor capacity),通过视觉移动和身体动作看到对象。人类的认知显然从出生就具有某种先天的主动策略与能力,并在后天环境中强化或抑制这些策略。或许从觅食反射(rooting reflex)例子中可以得到说明:新生儿(1—120天)在唇角接受到皮肤碰触后,会先天地产生转动嘴唇寻觅最佳哺乳角度的行为。在这个过程中的旧解释中,引发的刺激是外部的,且反射是一个应激行为;但是,从预测加工的视角看,由于人类的先天策略中保留着主动性与内置的倾向性,新生儿可以将碰触嘴唇及其邻近区域的物体判断为食物来源,这使得他们可以主动做出唇角追觅哺乳的动作;唇角追觅事物的动作并不应仅仅解释为一种刺激—反射机制,而是包含着复杂的身体反馈背后的主动预测机制。或许正是生命系统具有的这种主动倾向性和能力,使得我们具有了追寻事物的行为,并使得我们可以在外部世界主动地从环境中寻找和获取有利的生存条件。
其次,反驳关于感知、认知与行动的分离假说。经典认知主义模型将感知、认知与行动分离,它不仅仅依赖上面所说的感知被动依附于认知,便于解释认知单元的表征过程,更深层次地说,这种感知、认知、行动的分野很大程度和该理论大量借鉴通用编码理论(common coding theory)有关。在这种理论模型中,感知即输入、认知即信息处理、行动即输出;行动需要认知单元将感知信号进行表征处理。但这种模型在最近三十年的具身认知理论发展中被不断挑战。具身认知模型的支持者认为,感知、认知与行动并不是简单的线性因果关系,而是一个动态的缠绕过程。赫利认为感觉、认知与行动处在统一平台上动态协作,或者诺伊支持依赖感觉运动能力在行动中知觉到世界,或者克拉克认为的主体的认知是与环境的密切组成的耦合系统,但无论哪一种模型都反对将认知与身体的感知与行动割裂开。我们不妨提供一个最低版本的支持连贯模型的解释。一个沉思者或许真的不需要借助行动和感知外部环境来思考,但在绝大多数生活场景中,人的预测,乃至全部认知活动总是处在一个与环境动态交互的状态和场景中。例如,一个灵活奔跑的运动员通过脑激活了腿与足部的大量神经感知,而对上肢很少感知与注意,似乎腿部参与控球预测的程度远大于上肢;在一些极端版本中(比如阿尔兹海默症患者与他的记事本),研究者会认为主体会将脑的部分功能与外界环境中的工具或设备整合在一起,形成高效的认知回路;他们或认为这些外部设备也部分地参与了认知过程与预测过程。在这些比较性的例子中,我们或许可以看到,感知与行动时刻构造着人的认知过程(和范围),并影响着预测过程。甚至在一些案例中,认知的边界会随着认知任务的不同而变得可塑(扩大或收缩)。以上的案例至少说明分离假说对人的大多数认知现象的解释是非常刻板和静态的——没有考虑到扶手椅思考之外的真实生活认知场景中的认知现象;而连贯假说看起来更符合我们现有的理论直觉。
最后,反驳关于脑局部模块的假说。全局加工理论与心智模块假说得到启发的背景略显不同。心智模块假说的背景是试图理解不同认知任务背后的机制,且这个机制必须以信息封装与模块化处理的方式,将外界环境信号表征为输出信号的方式。这种理解仍然是基于通用编码理论和冯诺依曼的问题解决机(problem-solver)的。而全局加工理论并不试图解决问题或者解释认知功能,它的旨趣在于理解和发现人的意识与意识的活动机制。这就是说,全局加工理论是否能够反驳心智模块假说的关键或许真的是一个向未来开放的科学证实的问题,而不是纯粹哲学的问题(虽然依照今天的科学进展来看,似乎全局加工理论更加合理)。
六、总结性讨论
本文回顾与比较了人类心智理论中三个典型理论,即基于预测模块的认知主义策略、联结主义预测加工模型与具身认知的预测加工模型,我们或许可以看到不同的理论策略或模型采取的认知尺度略有不同。认知主义的预测模块策略基于“经典三明治”理论背景,关注人类认知架构中内部化、水平化的信息加工与处理过程。这个策略虽然在微观尺度上可以模拟人的信息加工机制,或者模拟人的某种认知行为和现象(比如我们在第二节举例说明的,模拟人类机制的机械手臂感受比较器),可一旦我们将预测行为的尺度放大到“人与环境”这个层面,似乎这种解释策略就略显不足。因而,在这个基础上我们指出,由于坚持感知、认知与行动的分离,以及被动模型的方式,认知主义不能满足解释人类的预测行为。
而与此相对,联结主义提出了一个改进型策略,它采用了全局意识假说下的多层级贝叶斯推断架构。这个架构解决了预测校准机制不明确和信息处理结构单一的问题,但是仍然忽略了身体与行动、本体感受的作用——预测加工似乎受困于身心分离(disembodied)理论的束缚。
最后,具身认知立场的预测加工模型最主要的贡献或许在于,克拉克等人将预测行为的解释尺度从以脑为中心(brain-centered),放大到“人—世界”(personworld)。这不仅在认知架构上将感知与行动都纳入“广义贝叶斯计算”的考虑中(虽然细节机制仍然有待解释),而且,由于本体感受的驱动,具身的预测机制与世界获得了直接的联系。当然,本文并不想独断地宣称具身的预测加工一定准确地刻画了人的预测活动,但至少我们通过比较与回顾的方式展示出了一种理论解释上的最大可能性,并期待未来更多科学与哲学的新发现,以便同领域的学者们可以共同推进预测加工模型的研究,破解人类心智之谜。
猜你喜欢
航天制造技术(2022年3期)2022-07-15
内燃机与配件(2022年2期)2022-01-17
山西教育·招考(2020年2期)2020-03-23
小资CHIC!ELEGANCE(2019年28期)2019-09-12
体育学刊(2018年6期)2018-01-22
中国信息技术教育(2017年19期)2017-10-31
现代职业教育·职业培训(2017年3期)2017-08-13
Coco薇(2017年2期)2017-04-25
Coco薇(2016年7期)2016-06-28
家庭医学(2016年3期)2016-04-05