
一种敏捷卫星高集成数传控制单元设计与验证
2022-10-25 03:18:36王元乐张建华杨玉辰杨新权袁素春邸剑峰张守娟侯舒维
空间电子技术 2022年5期
王元乐,张建华,杨玉辰,杨新权,袁素春,邸剑峰,张守娟,侯舒维
(1.西安交通大学 微电子学院,西安 710049;2.中国空间技术研究院西安分院,西安 710000)
0 引言
随着航天技术持续发展和用户需求不断提升,敏捷卫星研制方兴未艾,国内外学者和工业界均开展了针对敏捷卫星的相关技术研制和应用实践。国外,美国新一代卫星平台WorldView-4(2019年)和法国新一代卫星平台Pleiades NEO(2021年)均支持敏捷成像能力;国内,已发展到第二代敏捷卫星,敏捷机动能力和稳像水平达到国际领先水平,可实现任意航迹成像、正南正北正反扫成像、垂直轨道方向正反扫、多条带拼幅成像、星上自主任务规划技术等应用[1]。光学敏捷遥感卫星在一次过境时可以实现有效的全区域覆盖,使得卫星对地观测能力得到大幅的提升,其在遥感侦察、抗震救灾、资源调查和监测等应急任务中能够发挥观测能力强、时效性高等优势。设计了一种新型的高速数传控制单元,产品硬件具备高集成度,软件采用模块化架构,具备易用性、高可靠、长寿命、抗辐照等特点。数传控制单元作为卫星有效载荷的核心设备之一,其能力提升将有效支持敏捷卫星自主任务执行等业务功能,提高敏捷卫星开展业务化遥感服务能力。
1 现状与需求
1.1 发展现状
伴随着信息技术的高速发展,在全球范围内极大扩展了遥感数据的应用与影响,基于互联网的大数据时代,不断拓展着遥感数据的供给面与需求面。欧美航天制造商在航天发展领域提供了更具有挑战的创新实践,如COTS器件应用、高功能密度比集成化技术、多功能小型化技术等,国外不断涌现以IT 公司为背景的新兴商业航天公司,组建对地遥感卫星观测系统,推动卫星敏捷化、智能化与自主化发展[2]。
中科院张兵研究员[3]2011年提出一种智能高光谱卫星有效载荷系统。武汉大学李德仁院士[4]2017年提出了“对地观测脑”的概念,设想在对地观测脑中,遥感、导航卫星星座作为对地观测脑的视觉,通信卫星星座作为对地观测脑的听觉,对获取的观测数据处理分析获取用户需求的数据信息。
随着卫星遥感结合人工智能、大数据、互联网、5G、云计算等技术不断创新发展,国内外在航天技术领域不断应用实践新技术,未来敏捷卫星易用性将不断结合新技术创新,将为用户提供高质量定量化实时遥感信息服务[5]。面向敏捷卫星发展需求,卫星数传分系统需要具备时间管理、数传任务自主执行、系统重构功能、自主安全模式、批指令开关机、灵活支持在轨处理与传输业务等多项功能。
1.2 功能需求
敏捷小卫星数传控制单元一般需要支持CAN总线协议,具备接收执行整星指令、标准数据块、卫星星时、平台姿态和GNSS广播数据;支持分系统内各设备或相关单元开关机、工作模式指令;采集分系统遥测并按要求返回给星务等功能。同时,除了执行单条指令外,支持数传自主任务执行,根据当前工作模式、前一任务结束状态以及后一任务的状态,自主生成相应的执行指令序列,并按照预先设置的指令执行时间及间隔定时发送。数传控制单元主要需求如表1所列。
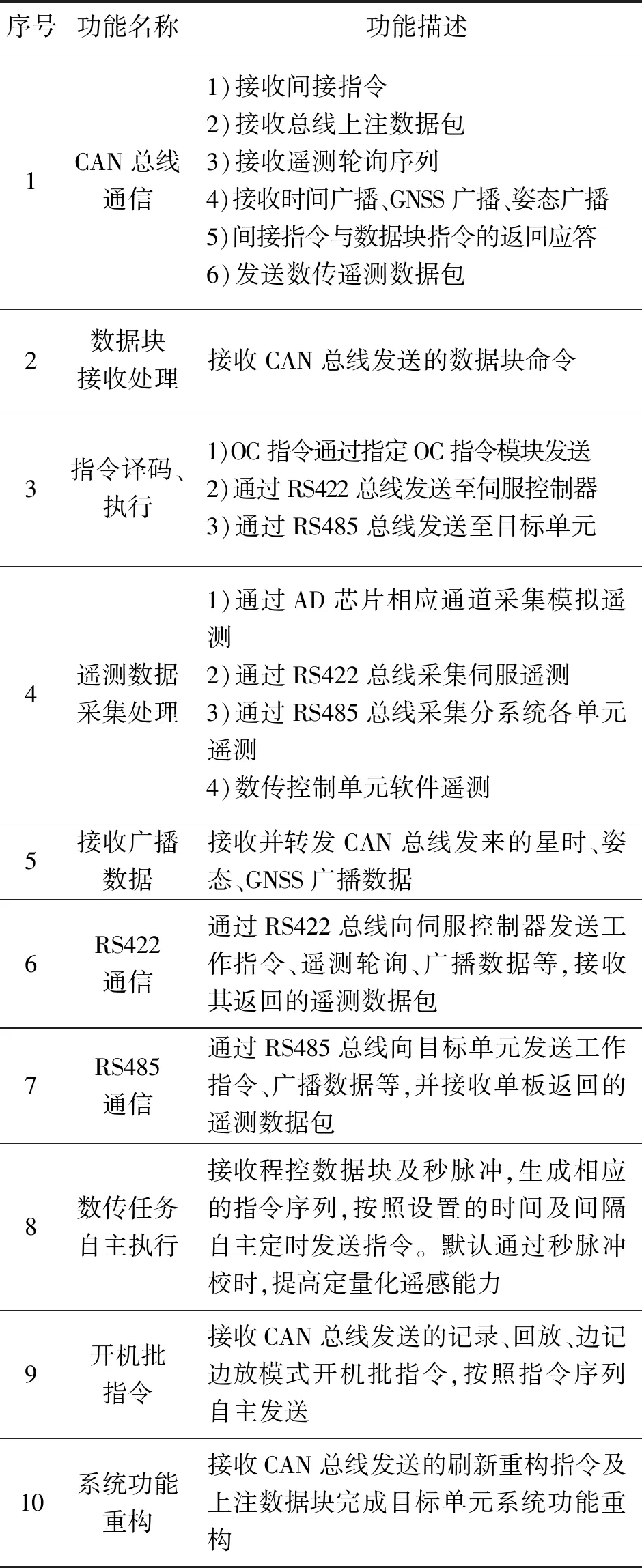
表1 数传控制单元功能需求Tab.1 Function requirements of control unit for data transmission subsystem
1.3 易用性需求
数传分系统一般包含设备较多,设备操作和指令类型较多,在轨应用模式较多,特别是指令与应用模式组合起来后,产生的控制指令序列会更多,且指令间有严格的顺序和时间间隔要求,用户一般情况下对指令编排难于掌握。同时,指令中还包含多条带参数指令,更增加了系统使用的复杂性,给数传分系统测试与在轨使用带来诸多不便,交互性不够友好,给用户使用带来了不便,操作控制易用性不足[6-7]。
针对敏捷卫星的运控模式要求,兼顾整星任务灵活、在轨处理等服务需求,开展新型数传控制单元研制,面向计算资源、存储资源、数传弧段资源、卫星能源等制约短板,支持定义面向业务的通用“数传任务”,从静态任务规划向动态任务规划转变,满足敏捷卫星用户易用性需求,开展面向业务的通用“数传任务”。需要在不考虑资源约束条件下,得到初始的任务规划队列;再根据地面任务规划系统,根据卫星方提供的“数字化模型”,动态计算任务队列对应的可用计算资源、存储资源、容量、数传弧段长度、卫星能源、天线预置时长、成像姿态预置时长等,修正约束条件;最终通过约束条件和任务队列之间的闭环迭代优化,避免传统运控模式过渡保守的资源约束制约卫星使用效能[8]。
2 工程化实现
2.1 硬件单元设计
针对产品高功能密度比、高可靠性指标、小型化需求[9],数传控制单元主备份功能需要集成在一块单板实现,支持冷备份及总线冗余、接口交叉备份设计,选用高集成硬件模块单元。设计具备CAN总线接口,秒脉冲及时间接口、与伺服控制器RS422串行接口,其中RS422串行接口支持4路RX、TX接口,满足两台伺服控制器主备接口[7]。硬件模块设计框图如图1所示。
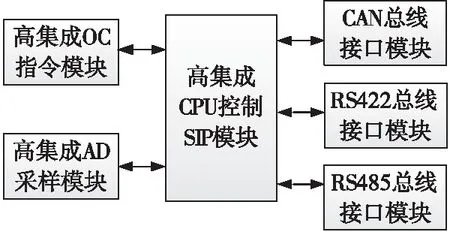
图1 硬件模块化设计框架Fig.1 Hardware modular design architecture
数传控制单元实现的主要功能如下:
1)CAN总线通讯:完成姿控、GNSS、星时广播数据接收、智能处理遥测反馈、感兴趣区域位置或者目标信息等用户接口、固存和伺服控制器的上行数据块接收、应用软件上注。
2)直接遥控功能:接收CAN总线命令,通过数传控制单元产生分系统内部的OC型遥控指令,通过数传控制单元软件解析,完成数传分系统内部单元模块的遥控和使能控制。
3)RS485通信:接收CAN总线命令,通过数传控制单元产生分系统内部的总线型遥控指令,发送给分系统各个单元;接收各个单板内部RS485总线返回的各个单板遥测,完成分系统内部遥测接收,将分系统内部遥测转换为数传控制单元的CAN总线类型遥测。
4)RS422通信:数传控制单元从整星CAN总线获得数据包,从中提取伺服控制器通信数据,分别组帧发送给伺服控制器。数传控制单元与伺服控制器采用RS422异步半双工串行方式通信,波特率为19.2Kbps±1%。支持天线跟踪完成后,启动关机流程,数传控制单元通过向伺服控制器发送“伺服控制器工作模式指令:停止”,按照约定时间≥50ms后完成伺服控制器关机。
5)秒脉冲及时间接口:秒脉冲接口采用RS422接口电平,时间广播接口采用CAN总线广播,具备秒脉冲对时校时功能,根据秒脉冲和内部计时器形成内部时间(UTC时),作为数传任务指令执行的高精度时间参考。
6)加密功能:具备可选的密态、明态传输,支持加密信息传输给数传分系统调制适配单元,完成X对地数据的加密。控制单元实物如图2所示。
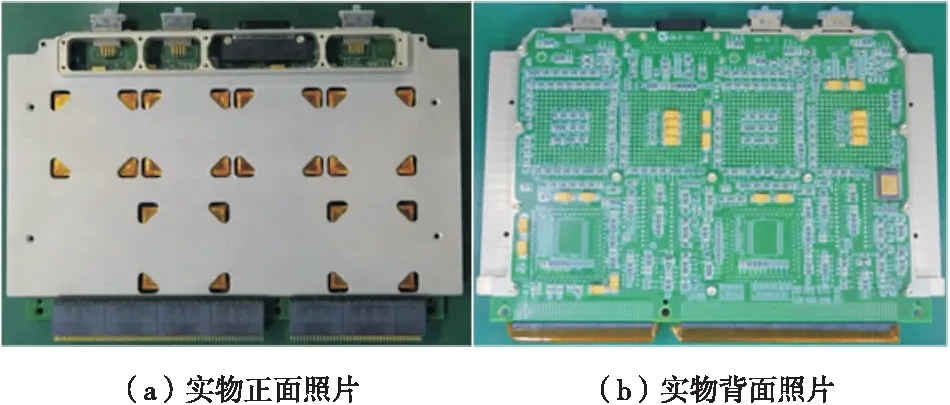
图2 数传控制单元实物照片Fig.2 Real photos of control unit for data transmission subsystem
2.2 软件架构设计
数传控制单元通过CAN总线与星务分系统进行通信,接收星务分系统发送的总线指令、卫星广播数据、上注程序等,并向星务分系统返回分系统遥测数据、固存文件列表数据包等。通过RS485总线完成数传分系统的遥控遥测管理,并通过RS422总线与伺服控制器进行通信。数传控制单元除可以接收执行单条指令(数据块)外,面向敏捷卫星需求,需要具备数传自主任务执行功能;当接收到121byte的程控数据块后,根据相应字节及比特,解析执行当前任务需要的信息,生成相应的指令序列后,按照设置的时间及间隔定时发送指令,最终固化在数传控制单元的高可靠抗辐照非易失存储器上运行,实现卫星数传易用性。数传控制单元仅在收到“进入自主安全模式”指令后开始计时,对数传设备加电时间进行监测,20min后相应执行数传设备关机操作,此时数传控制单元不再响应CAN总线指令。软件模块化框图如图3所示。
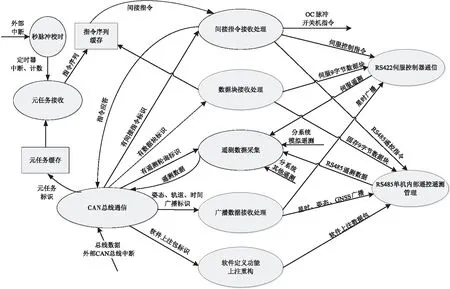
图3 软件模块化设计框架Fig.3 Software modular design architecture
2.3 结构、力、热仿真与设计
结构设计方面,单板采用VPX行业标准设计,单元机械尺寸为6U标准结构设计,模块外形尺寸为250.75mm×146.6mm,重量<1.5kg(含散热结构)。主要由主盒体,前盖板,后盖板等组成,如图4所示。结构考虑满足工艺性、连接可靠性等方面要求,采用了重量轻、刚度高、精度好的盒体式结构型式[10]。结构紧凑、重量小、质心低,达到轻而刚,且强度满足要求的目的。
图4 数传控制单元盒体Fig.4 the box with control unit for data transmission subsystem
热设计方面,单板中左右两部分互为冷备份,总热耗约为6.4W,采用Flotherm软件作为分析工具,热仿真时只对主份进行仿真计算。设备工作在45℃工作温度下,数传控制单元随单机设备进行稳态计算,计算时仅考虑热传导和辐射散热,仿真分析温度结果如图5所示,最高温度75℃,可以满足航天器产品热设计一级降额要求。
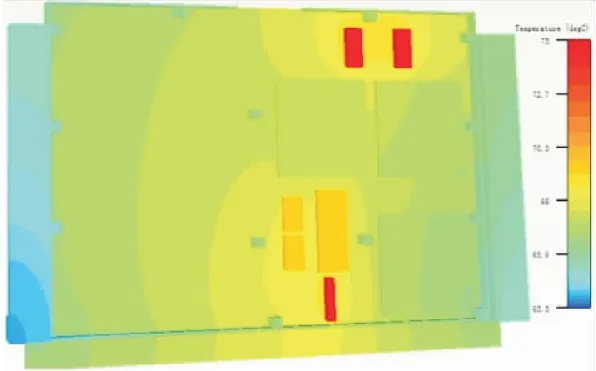
图5 数传控制单元温度仿真结果Fig.5 Temperature simulation results of control unit for data transmission subsystem
2.4 可靠性设计
针对高可靠、长寿命需求,数传控制单元需要选用抗辐照宇航元器件,其应具备热设计、力学设计、抗辐照、长寿命等要求。国产器件严格按照相关航天器用国产元器件选用目录进行选择,进口元器件尽量为相关航天器用进口元器件选用目录内器件。产品的原材料、工艺保证执行相关航天产品材料、机械零件和工艺保证要求。
针对卫星任务特点,采用充分、合理的硬件冗余设计、功能冗余设计和软件容错设计,消除系统单点故障;软件设计方面采用模块化软件,合理高效的处理流程,开展充分的软件仿真,保证软件健壮性;同时采用关键部分三模冗余设计,提高抗单粒子能力保证长寿命可靠工作[10]。
3 试验验证
产品完成相关设计后,开展了完备的功能覆盖性测试和强度测试:
1)开展CAN总线通信测试,通过外部CAN总线设备模拟星务完成通信,具备接收9、57、121、249byte上行数据块通信,正常接收星务时间广播、GNSS广播、姿态广播、遥测轮询、间接指令等。
2)开展秒脉冲功能测试:通过秒脉冲对时功能后,可将数传内部相关时间功能的定时精度提高到10ms量级,对敏捷成像后续定量化处理提供有力支撑。
3)开展RS422总线通信测试,完成了与伺服控制器1、2的主备份功能测试,包括天线展开、小角度转动、大角度转动、与AOCC主备通信等功能性能均正确。
4)开展单机分系统内部设备46条直接指令和76条模拟遥测直接采集测试:完成单机内部的路由单元、计算单元、固存单元、调制适配单元的开关机功能测试,完成分系统内部伺服控制器和调制发射机等设备的开关机功能测试。
5)开展单机内部RS485总线测试:具备与单机内部的路由单元、计算单元、固存单元、调制适配单元共12大类135条长度可变的带参遥控指令,支持数传分系统快遥、慢摇、取FAT表、智能处理类共四大类遥测,支持密钥上注数据块,支持智能处理上行9byte、12byte数据块,支持应用软件定义功能中上注刷新重构数据帧、指令帧、返回帧的通信功能,支持智能处理软件定义功能中上注重构操作。
数传控制单元全功能随单机设备整机级完成了随机振动、正弦振动、冲击、加速度的力学试验,热真空、热循环等环境试验,完成了EMC、磁试验、热平衡等研制试验,测试结果表明功能工作正常、性能稳定、可靠性高,可以满足单机、分系统、整星的功能性能要求。
4 结论
介绍了敏捷卫星数传控制单元的发展现状和应用需求,基于“地面任务规划+星上指令模板执行”的传统运控体制已不能很好的满足敏捷卫星应用需求,需要开展面向敏捷卫星高集成易用性数传控制单元研制,通过合理的技术途径,开展了高可靠工程化实现方案,完成了充分有效的力、热、强度测试等试验验证,相关试验验证结果表明:采用该数传控制单元的数传分系统可以满足遥感敏捷卫星易用性、高可靠和高集成等需求。该数传控制单元已在工程任务中应用,大幅提升了卫星数据处理和传输效能,特别在数传任务自主执行功能、在轨智能处理任务支持方面有效提升了卫星应用的灵活性和自主性,将卫星每轨成像任务提升到优于20个任务,可为今后的卫星高速数传技术应用发展提供有益参考。
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30 12:48:10
计算机测量与控制(2021年8期)2021-08-23 09:02:16
电子制作(2019年11期)2019-07-04 00:34:40
载人航天(2019年1期)2019-03-07 01:41:02
测控技术(2018年5期)2018-12-09 09:04:26
电子测试(2018年18期)2018-11-14 02:30:34
电子测试(2018年13期)2018-09-26 03:30:00
现代工业经济和信息化(2016年6期)2016-05-17 05:36:13
电子器件(2015年5期)2015-12-29 08:43:30
航天器工程(2014年5期)2014-03-11 16:35:56
