
空中交通复杂性研究进展
2022-10-25 05:03:00王红勇张加豪温瑞英
航空工程进展 2022年5期
王红勇,张加豪,温瑞英
(中国民航大学 空中交通管理学院,天津 300300)
0 引言
随着航空运输的快速发展,民航飞行流量大幅度增加,空中交通日益繁忙、复杂。传统空中交通管理(Air Traffic Management,简称ATM)手段与复杂空中交通态势之间的矛盾越发明显,不仅严重影响了航空运输系统运行效率,同时也会导致重大安全隐患。为此,空中交通管理部门必须科学评价并提升空中交通服务能力,以保障空中交通的安全和高效。
空中交通管理的任务是维护和促进空中交通安全,维护空中交通秩序,保障空中交通畅通,从时间尺度上主要通过空中交通流量管理和空中交通管制服务来实施交通调配。空中交通流量管理通过规划航班起飞时刻、进区域时刻等,从宏观、战略角度保证航班流量与相应容量的平衡,但无法针对具有相同流量而不同微观结构的空中交通态势实施不同的管理策略。空中交通管制服务则侧重于两架航空器间的间隔保持、冲突解脱等战术调配行为,缺乏从宏观上考虑空中交通态势的演进状况,易出现冲突链式反应。为此,国内外研究者引入了复杂性的概念,从管制工作负荷、航空器间影响关系的无序性等多个方面刻画空中交通态势。基于空中交通复杂性,针对部分航班实施航迹调整,可以引导、控制复杂交通现象问题,有效减少冲突链式反应以及由之带来的工作负荷。
虽然空中交通复杂性的研究成果很多,但其定义以及与工作负荷、安全等之间的相互关系依然没有形成共识,其研究框架及未来发展趋势并不明确。为此,本文首先介绍了现有空中交通复杂性的研究团队,在厘清了空中交通复杂性与管制工作负荷、空中交通复杂性与空中交通安全之间的联系与区别后,总结了空中交通复杂性的不同研究类别。其次,从研究思路角度,将现有空中交通复杂性研究归纳为基于管制认知观、基于几何结构观、基于复杂系统观的三种技术路线,并总结分析了不同技术路线的主要内容以及优缺点。最后,通过新一代空中交通管理系统特征的分析,提出了空中交通复杂性管理在战略、战术阶段的基本内涵,并在此基础上,从复杂性定义、研究对象、研究内容、理论体系等方面指出了空中交通复杂性研究的未来发展方向。
1 研究团队
首篇空中交通复杂性研究论文发表于1963年,但自1976年基于“Control Difficulty Index”提出较为完整的空中交通复杂性概念后,才成为空管领域的研究热点。美国、欧洲都将其作为基础性研究列入到新一代航空运输系统建设规划中,在国际民航组织发布的航空系统组块升级计划中也明确将基于复杂性的空中交通管理列入最优容量及灵活飞行引线的第3个组块中。
为综合分析空中交通复杂性在国内外的研究概况,本文选取了Web of Science(WOS)和中国知网(CNKI)两个数据库为数据源,检索时间设定为2021年9月30日。在WOS数据库中以“Air Traffic Complexity”“Airspace Complexity”为主题词检索到自1996年以来25年间的563篇文献,涉及1 028个研究机构中的2 146名作者。在CNKI数据库中以“空中交通复杂性”“空域复杂性”为主题词检索到自2003年以来18年间的153篇文献,涉及212个研究机构中的404名作者。


图1 WOS数据库中研究论文作者合作网络Fig.1 Author cooperation network in WOS

图2 CNKI数据库中研究论文作者合作网络Fig.2 Author cooperation network in CNKI
采用SATI文献题录信息统计分析工具对空中交通复杂性研究团队的合作关系进行分析,WOS和CNKI数据库的分析结果分别如图3~图4所示,可以看出:在WOS中文献数量排名前五的机构有南京航空航天大学、佐治亚理工学院、NASA、中国民航大学、MIT,发文数量都在10篇以上;在CNKI中收录论文数量排名前五的机构有中国民航大学、南京航空航天大学、中国民用航空飞行学院、北京航空航天大学、空军工程大学,发文数量都在6篇以上。

图3 WOS数据库中研究论文机构合作网络Fig.3 Institution cooperation network in WOS

图4 CNKI数据库中研究论文机构合作网络Fig.4 Institution cooperation network in CNKI
2 复杂性和工作负荷
诸多研究表明空中交通复杂性和管制员工作负荷之间存在密不可分的相互联系。从研究目标看,空中交通复杂性研究的最初目标就是为了客观描述空域扇区容量,而管制员工作负荷是扇区容量最为直接的体现。目前基于管制员工作负荷的容量评估方法依然是空域容量的四种主要方法之一。因此,空中交通复杂性对空域扇区容量的客观评价无法脱离于空中交通管制员的管制难度、工作量大小的评价。从研究方法看,空中交通复杂性影响因子大多来源于管制员指挥过程的观察、管制工作负荷的变化等,例如爬升航空器数量、下降航空器数量、平飞航空器数量、交通混合系数等指标,来自于相同航空器数量带来不同管制工作负荷这一基本出发点。同时,对管制工作负荷的研究也需要考虑空中交通复杂性的影响,通常需要对具有不同复杂程度的空中交通场景下的管制工作负荷进行对比分析。但从本质来看,空中交通复杂性与管制工作负荷之间并非直接相连的线性关系。
空中交通复杂性与工作负荷的关系如图5所示,空中交通复杂性是对管制员所面临空中交通模式、空域结构、运行环境的客观描述,是管制员工作负荷的根本性驱动源。

图5 空中交通复杂性与工作负荷的关系Fig.5 Relationship between complexity and workload
一方面,受设备质量、管制员个体差异、认知策略等“中间因素”的影响,同等复杂程度的空中交通态势也可能产生具有较大差异的管制工作负荷。为反映不同认知策略对管制工作负荷的影响,J.M.Histon等提出了认知复杂性的概念,将其定义为管制员对空中交通态势的认知难度,并从标准交通流、关键点、分组、责任移交等四个方面抽象了可缩减复杂性的典型管制认知策略,为从结构模式角度研究管制认知复杂性奠定了基础,如图6所示。
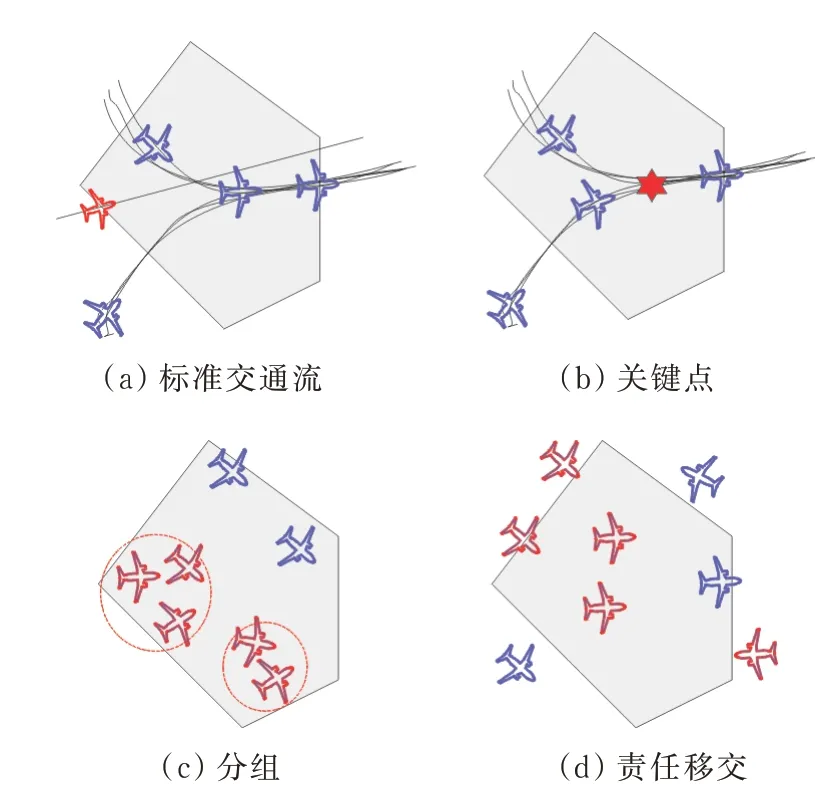
图6 基于结构的抽象模式[10]Fig.6 Structure-based abstractions[10]
另一方面,管制员所做的管制决策受不同管制工作负荷的影响,这些影响自然也会反作用于空中交通态势的演变。例如在飞行冲突解脱过程中,一些缺乏全盘考虑的解脱策略甚至可能导致飞行冲突的多米诺效应,从而加剧空中交通态势复杂程度。
考虑到难以充分表达空中交通复杂性和工作负荷之间的关系,相关研究者很早就尝试定义与管制员工作负荷无关的复杂性指标。随着新一代空中交通管理的发展,飞行冲突解脱等传统方式下由管制员处理的任务将逐步由智能化空中交通管理系统、机载自动化系统全部或部分替代。因此,脱离管制员工作负荷对空中交通态势复杂性的客观描述将是未来的研究方向。
3 复杂性和安全
有效地维护和促进空中交通安全是空中交通管理的首要任务,因此所有的空中交通管理策略都必须考虑其实施后对安全水平的影响程度。从系统角度看,影响空中交通安全的风险要素主要包括人为因素、设施设备、环境以及管理等方面。而这些风险要素的具体体现便是空中交通事故(碰撞)、事故症候、工作差错等不安全事件的数量。在实际运行中,受限于数量极少的空中交通事故数据,通常采用空中交通态势中的飞行冲突次数来衡量空中交通安全水平。为反映飞行冲突的强度,研究者进一步提出了飞行冲突持续时长、航空器距离偏离间隔标准的程度等冲突风险评价指标,为全面刻画空中交通态势安全水平奠定了基础。然而这种过于强调飞行冲突风险的态势评价方法,忽略了诸多无飞行冲突但管制员仍需频繁调配或者暂时无飞行冲突但受少量随机因素影响后却出现大量不可预测飞行冲突的情景。而基于空中交通复杂性概念则可以对这些用安全指标无法测度的空中交通态势进行客观描述,是对空中交通态势更为本质和全面的描述。事实上,在空中交通复杂性的早期研究中,本着更为客观反映扇区容量的出发点,研究人员就已经筛选出了除潜在冲突之外的诸多非安全类空中交通复杂性因子,如扇区内航空器总平飞时间、航空器的平均速度、航空器航向改变数量等。
空中交通复杂性对空中交通运行安全的影响主要体现在两个方面,一是导致管制人因差错的概率,二是潜在冲突风险的概率。在空中交通管制指挥过程中,管制员需要在极其有限的时间范围对航空器进行调配,以避免发生飞行冲突。而空中交通态势越复杂,管制员在短期内做出正确决策的压力就越大,其发生管制人因差错的概率就越大,而空中交通运行风险水平相应就越高,不同复杂程度下冲突解脱概率如表1所示。R.Tomislav等通过仿真实验表明,管制员在高复杂性态势下发生不安全事件的概率是低复杂性态势的571倍。

表1 不同复杂程度下冲突解脱概率Table 1 Comparison of probabilities to solve the conflict in traffic situations with different levels of complexity
在高复杂性空中交通态势中,航空器间的交互关系更多,其发生潜在冲突的可能性也就越大。Wang H Y等通过实际运行数据统计(如图7所示),无论是扇区内潜在冲突的总次数还是每架飞机的平均潜在冲突次数都随着复杂性的增加而增加,其结论也被S.L.Brázdilová等通过仿真实验验证;P.Tamara等采用长达两周的欧洲空域实际运行数据验证了复杂性与冲突风险之间存在强相关性,相关系数高达0.829 6。

图7 空中交通复杂性与飞行冲突的关系[13]Fig.7 Relationship between complexity and flight conflict[13]
因此,虽然空中交通复杂性无法直接应用于飞行冲突管理,但空中交通复杂性的科学判断、预测对空中交通的安全运行至关重要,而对高复杂性空中交通态势的合理处置将有助于提高空中交通安全运行水平。A.A.Mutlu在对新的运行程序、新设计的空域进行评估时,不同于以往只侧重飞行冲突的评价过程,采用将复杂性和安全同步考虑的综合评价方法。
4 复杂性分类
从研究对象本质属性看,早期研究主要侧重两类空中交通复杂性:一类是认知复杂性,反映管制员在处理空中交通时的认知负荷;另一类是交通本身的复杂性,是从系统角度反映对空域和交通流特征的测度。J.M.Histon等进一步将空中交通复杂性划分为三类:态势复杂性(Situation Complexity)、感知复杂性(Perceived Complexity)以及认知复杂性(Cognitive Complexity),认为态势复杂性是交通态势的本身属性;感知复杂性是管制员的主观体验;认知复杂性反映管制员在对空中交通态势进行管制过程中,其工作认知模式下的复杂性,是执行管制任务的过程属性,受态势复杂性、认知模式和策略以及其他因素(如疲劳、压力)的影响。
J.J.Toy将空中交通复杂性分为内在本身复杂性(Inherent)和外在展现复杂性(Apparent)两类,认为内在本身复杂性是由诸如天气、地形、空域限制、交通密度等空域属性而产生的复杂性;而外在展现复杂性是由管制员的人机接口等所产生的复杂性,包括交通信息呈现给管制员的方式以及管制员在工作环境中所使用的其他接口等,例如显示器类型(有单色、彩色以及触摸屏等)、显示器或控制台的物理布局、管制厅布局、管制自动化系统界面等。
在前人研究基础上,文献[10]将空中交通复杂性从低级到高级分为认知复杂性(Cognitive Complexity)、组织复杂性(Organizational Complexity)、显示复杂性(Display Complexity)及环境复杂性(Environmental Complexity)四个层次。认为环境复杂性包括航空器数量、天气、拥挤等交通本身因素,从系统角度来看属于系统内部属性。组织复杂性包括目标、政策、策略、运行程序等因素。一般来说,这些组织因素是为了有效减轻环境复杂性而产生的,但事实上有些组织复杂性却会增加空中交通系统的约束,尤其在大流量背景下反而会增加环境复杂性。管制员在管制过程中,需要基于大量的空中交通运行信息进行决策,为辅助管制员的决策过程,总是期望这些信息能够快速地、精确地呈现给管制员。而显示复杂性就是这些信息通过不同显示方式所呈现的复杂性,无效或复杂的显示都会产生额外的认知复杂性。认知复杂性是与管制员相关的,是管制员在实施空中交通管理过程中认知难度的体现,决定了空中交通系统的总体能力水平。K.Treleaven等认为,应该将上述复杂性层次中显示复杂性和认知复杂性合并为计算复杂性(Computational Complexity)。
5 复杂性评价
现有针对空中交通复杂性进行评价的研究总体可以归纳为如下三条技术路线。
5.1 基于管制认知观的研究路线
航班大范围延误、空域拥挤等现象引发了对空域容量尤其雷达管制扇区容量进行客观评价的强烈需求,而空中交通复杂性也随之应运而生。空中交通态势中的复杂性是多种影响因素动态交织的体现,A.Majumdar等率先开展了空中交通复杂性影响因素的分析和识别研究。虽然交通密度是最被广泛认可的一类复杂性因素,但大多研究者也认为它并不能反映空中交通态势复杂程度的丰富性。通过直接或间接参考管制员意见,除了交通密度之外的诸多相关因素逐渐被挖掘出来,如空域因素、交通流因素及环境因素。空域因素包括扇区结构、限制空域等,也被称为空域复杂性;交通流因素包括潜在冲突数量、水平接近数量、航行要素改变数量等;环境因素包括雷雨、导航设施等。在复杂性因素分析基础上,NASA等机构提出了动态密度概念,并基于管制工作负荷对其进行了定义。其核心是通过全面评价管制员为保障空中交通安全而产生的物理和精神上的各种活动,一般先根据不同扇区的运行特征选取相应的典型因素,再基于实际或仿真运行数据,结合管制员对复杂程度的人为判定或者无线电通话负荷,采用线性或非线性的方法确定因子权重,最后综合相加得出该扇区的复杂程度,如式(1)所示。

式中:D为目标扇区的动态密度(Dynamic Density);N为典型复杂性因子数量;C为包括交通密度的第i个空中交通复杂性因子值;W为第i个空中交通复杂性因子权重。
很多研究者将该方法应用于当前管制模式下不同类型的空域中,部分研究者为对比预测未来空中交通的复杂程度,也尝试将这种方法应用于航空器自主保持间隔运行空域中、亚太地区在洋区管制中实施航路自由选择场景下。
国内研究者董德存教授团队在国内率先开展了空中交通态势复杂性因素选取研究;杨家忠教授团队首次探讨了空中交通复杂度与管制员脑力负荷的影响关系,并探讨了动态复杂性因素对管制员工作负荷影响;胡明华教授团队在国内率先开展了空中交通复杂性指标体系的精炼研究,首先从前人研究文献中选取了42个交通类指标、7个空域类指标,并先后采用了灰色关联聚类、主成分分析等方法对指标进行了精炼,最后应用于区域管制扇区、终端管制扇区交通态势的复杂性分析;赵嶷飞教授团队引入因子分析、聚类等方法,基于实际管制员陆空通话数据探讨了复杂性指标与管制员陆空通话负荷之间的关系。
近年,随着新一代信息技术的快速发展,空中交通复杂性研究也呈现了与机器学习、数据挖掘等方法不断融合的研究趋势。如曹先彬教授团队针对小样本集中的空中交通态势复杂性知识挖掘难题,提出了一种基于知识转移的扇区运行复杂性评价框架;针对大量空中交通复杂度样本数据中的标签噪声问题,Xie H等提出了一种基于置信学习和XGBoost的空中交通复杂性评估模型及方法,并尝试将深度卷积神经网络应用于扇区运行复杂性中。
从根本上来说,基于管制认知观的空中交通态势复杂性评估,虽然易被管制员理解,但为了使特定扇区与管制负荷达到最大相关性,必须根据不同扇区选择不同复杂性因子,且不同扇区中复杂性因子的权值都需特别设定,因此该方法一直以来不具备普适性。而随着蓬勃发展的新一代信息技术在空中交通复杂性研究中的不断融入,以上瓶颈也将有望取得突破。
5.2 基于几何结构观的研究路线
要解决基于管制工作负荷评价空中交通复杂性时受管制员人因影响的问题,一种可行的思路是从空中交通的时空分布角度出发,完全基于客观的航迹数据研究空中交通态势的内在复杂性。国外D.Delahaye等从反映扇区内航空器群冲突风险的角度出发,提出了基于航空器位置、速度等航迹数据量化计算复杂度的方法,通过对空中交通态势几何结构分析建立了不依赖于管制员主观认知的空中交通复杂性客观评估指标。主要分为:航迹数据处理、航迹间几何关系计算、单航空器复杂度计算,累计所有航空器复杂度或基于分形维数、Lyapunov指数等计算无序性来测度空中交通复杂度。S.N.Hasan等在基于Lyapunov指数测量空中交通几何结构复杂性的基础上,提出通过航迹规划控制复杂性的方法;R.Marko等以航空器之间的时空几何关系为基础,将生态系统理论引入到空中交通态势分析中。
国内基于几何结构观的空中交通复杂性研究成果也比较丰富。胡明华教授团队率先依据两两航空器之间的迫近性、随机性及连携性建立了空域复杂度评估模型,实现了空中交通态势几何结构描述,认为相对位置D可反映航空器i,j之间的迫近程度,而相对速度V则反映了迫近倾向,并通过矢量内积(D,V)是否大于0判断航空器之间是否处于汇聚交通态势;胡明华教授团队还首次提出管型空域概念,建立了两类繁忙管型空域模型,并采用基于几何结构的复杂性测度指标对其评价;董兵在国内首次尝试了通过非线性动力学等理论建立终端管制区交通几何结构复杂性评价模型;张军院士团队针对空中交通复杂度评估预测精度不足的问题,首次基于随机线性混杂系统理论提出了一种交通态势几何结构复杂性的评估方法;赵嶷飞教授团队在胡明华教师团队所建模型基础上,通过增加冲突解脱指数对模型进行改进,进而依据单航空器扰动思想提出了基于几何结构的扇区复杂度计算及分布图示方法。针对终端区独特运行特征,赵嶷飞教授团队通过计算几何方法首次建立了终端区内五边到场交通复杂性模型,并探讨了五边到场交通中复杂性控制方法。针对自主间隔保持运行下高密度空域的复杂性,赵嶷飞教授团队提出了一种基于时序分析法的Lyapunov指数计算模型,以此测度了交通态势的几何结构复杂性,并通过对扇区网格化初步探讨了基于复杂性的扇区划分问题。
此外,也有研究者将研究对象聚焦为空中交通流,通过空中交通流复杂性解释空中交通复杂性本质。王飞面向空中交通流的复杂性测度问题,提出了基于小样本熵和多尺度样本熵的空中交通流时间序列的复杂性分析方法;Li S M等基于实际数据统计分析了多态空中交通流的动态演化及波动特征等。
通过空中交通态势几何结构的空中交通复杂性评估方法,剔除了管制员主观因素的影响,实现了客观描述空中交通复杂性的可能,对空中交通态势本质的理解深入了一大步。
5.3 基于复杂系统观的研究路线
复杂系统尤其复杂网络建模理论的引入,对空中交通态势结构和演化的理解提供了一套有深远意义的概念及组织框架,深化了对态势结构本质的认识。但目前依然处于起步和探索阶段,主要成果局限于单个或多个管制扇区局部态势的结构和复杂性测度。
复杂网络建模的核心是对复杂系统中的节点以及节点之间的相互关系进行抽象。在空中交通态势网络中,航空器被看作为节点。而最早对航空器之间的相互关系进行全面描述的是欧洲空管效能委员会在2006年提出的复杂性指标,将欧洲空域划分为20 n mile×20 n mile×3 000 ft的立体网格块,其中1 n mile=1.852 km,1 ft=0.304 8 m,并针对每个立体网格块计算航空器之间潜在相互作用的持续时间。如果航空器在同一小时的时间窗内位于同一单元中,则发生“交互”关系。交互时间与飞行时间之比称为“调整密度系数”。此外,还根据潜在的垂直、水平和速度相互作用之和计算得出“结构指数”,最终将“调整密度系数”和“结构指数”的乘积作为复杂性值。在前人研究基础上,赵嶷飞教授团队首次将复杂网络理论引入空中交通态势建模中,认为空中交通态势复杂性的本质是空中交通态势中的各组成元素在时间、空间上的动态相互关联关系。首先从二维角度建立了空中交通态势显示复杂性的网络模型;在深入挖掘航空器在小范围内聚集现象的科学问题中,提出了航空器群的概念及其划分方法。当前,该团队在将研究对象从单个扇区逐步扩展到多个扇区的过程中,持续改进模型,已先后建立了多层多级网络模型、动态加权网络模型。基于动态加权网络的空中交通态势复杂性网络建模如图8所示,该网络以航空器、航路点、航路段为网络节点,并根据不同类型节点之间随时间不断变化的相互时空关系为边,以相互关系的复杂性强度为边权构建网络模型。该模型的好处是可以综合考虑空中交通态势系统中的空域结构、交通流模式等关键要素,并可基于动态网络视角探讨空中交通态势复杂性的演化特征。

图8 空中交通态势复杂性网络建模示意图[13]Fig.8 Schematic diagram of air traffic situation complexity network[13]
近年来,国内其他研究者也开始尝试将复杂网络理论应用于空中交通态势中的关键节点识别、冲突解脱、复杂性评估中,进一步拓展了基于复杂系统观的空中交通态势研究范畴。
6 新一代空中交通管理系统下的复杂性
当前ATM系统源自二战后建立的雷达管制体系,由于管制员只能通过雷达、无线电、导航台等地基通信导航监视设备保障航空器安全间隔,也被称为“地基”ATM。“地基”ATM系统存在两个不足,一是ATM系统能力受限于管制员个人能力;二是限制了空域资源的充分使用,无法满足未来空中交通的持续增长。为此,欧洲和美国纷纷改革当前ATM运行概念,在卫星导航、数据链通信、广域信息管理(System Wide Information Management,简称SWIM)、广播式自动相关监视(Automatic Dependent Surveillance Broadcast,简称ADS-B)等先进技术支持下的新一代ATM系统中,航空器自主运行则是区别于“地基”ATM的核心特征,即航空器将在航迹管理方面分担管制员保持安全间隔的责任,如图9所示。

图9 空中交通运行方式对比Fig.9 Comparison of air traffic operation modes
在新一代ATM系统中,航空器与空域中其他邻近航空器以及地面服务部门之间可相互通讯协调,能够得到实时更新的其他航空器的位置、速度、飞行意图以及相关的天气实况、预报等。而由于可在飞行过程中修改其飞行剖面用于优化飞行里程、燃油消耗等,航空器航迹便具有了较大的灵活性。然而,ATM系统中每一个体的这种灵活性必将影响整个系统的运行性能和安全,尤其当处于交通流极度拥挤或多航空器多重相继冲突的空域态势中,每一航空器都需要更多的航迹调整策略以保障安全,因此这有可能超出机载系统的冲突解脱能力,从而造成空域安全水平下降。而空中交通管理部门通过空中交通复杂性管理则可在战略和预战术阶段及时预测并避免这些态势的出现,这也将是新一代ATM系统对空中交通复杂性研究提出的新需求。
因此,与以往侧重事后复杂性评估不同,在新一代ATM系统中的复杂性研究应该更关注其预测性,并可根据预测时长将复杂性管理划分为战略、战术两个阶段。战略复杂性管理应该伴随着航班飞行计划的制定、调整等过程的整个生命周期,在对每一航空器、每一可能机动所造成复杂性的科学计算下,对航空器的全航迹进行统一优化,其目标主要体现在空域中不存在过高复杂性热点、战术阶段复杂性在各类扰动下的变化量不大、空域所服务的航空器总量大、航空器总体延误水平较低且均衡等。战术复杂性管理则基于局部空间范围(如一个扇区)、短期时间范围(如15 min之内)内更精准的航迹预测信息、天气限制信息等实现航迹的快速调整,其目标是在尽可能遵守战略复杂性并避免机载系统及地面系统的飞行冲突探测和解脱超负荷运行的约束下,实现飞行冲突的快速解脱、最大程度符合不同类型航空器的最优飞行性能运行等。
7 展望
即使在全球范围内进行了将近50年的研究之后,测度空中交通和空域复杂度并将之控制在规定门限内,最终实现基于空中交通复杂性的管理方面依然存在诸多尚未解决的核心问题。由于空中交通需求的增加、新一代空中交通管理系统的发展,这些问题的合理解决在未来几年也将更加迫切。未来,空中交通复杂性可以在如下四个方面进行开展。
(1)空中交通复杂性定义亟需突破。空中交通复杂性虽然是国际空管领域的研究热点,但其定义一直未能统一。大多研究依然受限于当前“地基”管制集中决策方式,基于管制员管理交通态势的难度或工作负荷强度来定义空中交通复杂性。而在以航空器自主保持间隔运行为主要特征的新一代空中交通管理模式中,航空器更为丰富的分布式自主决策行为必将给空中交通态势研究带来新的问题,基于复杂性本质的空中交通态势复杂性定义也亟需突破。
(2)研究对象需要转变。空中交通复杂性从其诞生起就是以传统管制方式中单个扇区或多个扇区等局部空域为研究对象,对全空域态势复杂性在时空方面的综合体现考察不足。随着航空器自主保持间隔概念的发展,国际同行已逐渐认识到基于扇区分块运行的复杂性研究并不足以支撑侧重航迹一体化的航空器自主保持间隔运行,并率先开始转变研究对象。
(3)研究内容需要拓展。以往空中交通复杂性研究主要围绕影响因素分析、测度体系建立等方面,随着对问题理解的不断深入,研究内容也不断拓展到空中交通态势演化、控制方面。但总体而言,涉及空中交通态势演化的一些本质性问题还没有解决。如空中交通态势中各个要素间的耦合关系如何随着态势的整体演化形成更为复杂的具有不同层次和功能的耦合网,并如何进一步影响演化过程。
(4)理论体系需要完善。目前的研究已从最早采用倚重于管制员经验的主观测度研究向基于几何结构观、复杂系统观的客观测度研究转变,研究者也逐渐试探性引入了非线性系统、分形几何、复杂系统等现代科学发展中所取得的成果。但总体而言,现有研究对于空中交通态势中要素建模、态势理解和测度、态势演化预测都没有建立完整的理论体系。迫切需要以“整体思维”“关系思维”“动态思维”“非线性思维”的复杂系统理论为指导,构建空中交通态势复杂性研究框架。
8 结束语
对空中交通复杂性的科学评价、精准管控是实现空中交通精细化管理、从根本上提升空域系统服务能力的基础。本文从目前空中交通复杂性的研究团队出发,探讨了空中交通复杂性与管制工作负荷、空中交通运行安全之间的关系,总结了空中交通复杂性的不同类别,并归纳了现有空中交通复杂性研究的三种技术路线,最后结合新一代空中交通管理系统特征的分析,展望了空中交通复杂性研究的未来发展方向。
猜你喜欢
南北桥(2022年2期)2022-05-31 04:28:07
新商务周刊(2018年15期)2018-12-06 11:01:07
环球飞行(2018年7期)2018-06-27 07:25:54
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
航空知识(2017年2期)2017-03-17 18:17:39
西南交通大学学报(2016年4期)2016-06-15 20:29:36
中文信息(2016年3期)2016-04-05 00:14:03
计算机技术与发展(2016年10期)2016-02-27 00:44:08
民用飞机设计与研究(2015年3期)2015-12-07 12:09:31
中国民航大学学报(2015年3期)2015-03-01 01:57:19
