
一种地埋升跃式智能分类同步回收系统设计
2022-10-24 12:04陈秀龙靳其宝
电脑知识与技术 2022年26期
关键词:语音识别
陈秀龙 靳其宝
摘要:文章基于嵌入式控制系统设计出一种地埋升跃式智能垃圾分类同步回收系统,该系统基于语音智能识别技术,整体分为红外感测、智能分类、语音识别、容量检测、同步回收功能模块及其配套通信模块。通过语音识别技术实现自动检测、捕获、收集、分类垃圾,有效解决并指导人们垃圾分类和分类意识的形成,也能有效提高垃圾回收率。
关键词:智能分类;语音识别;容量检测;自动唤醒
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2022)26-0069-03
垃圾分类是垃圾处理过程中的重要环节,实施生活垃圾分类,可有效促进资源回收利用[1]。然而,由于基础配套设施不完善和人们垃圾分类意识薄弱,导致目前收集到的垃圾大部分仍是混合垃圾,極大影响了垃圾处理的效率[2]。随意投放垃圾、混合扔放会给环卫工作人员造成很大的体力负担,同时造成终端处理模式的低效率与复杂化,公共资源未能物尽其用、不能极大程度变废为宝,垃圾在地面上腐败速度快、发臭影响公共环境,存储在垃圾箱中的垃圾回收不方便等问题。有效的垃圾处理方法已成为垃圾分类问题解决的难题之一。当前,大量垃圾分类装置的解决方案已提出:文献[3]基于单片机设计一款带有语音辅助的垃圾分类投放系统,该系统分别搭载了语音识别、语音播报、舵机驱动等模块,通过语音播报垃圾种类并自动打开相应桶盖,实现精准投放,有效提高垃圾分类投放准确率;文献[4]通过HLK-V20芯片实现语音识别垃圾种类并控制SG90舵机转动打开相应种类垃圾桶,以此来达到利用语音识别垃圾的种类,实现垃圾的智能分类的目的;文献[5]采用语音识别模块,树莓派原装摄像头作为外部环境信息获取端,结合外围电路及部分硬件的低成本,应用性能高的智能语音垃圾分类桶。然而,在投放分类装置的便捷性问题上缺乏相应有效的解决方案,为此,本文提供了一种地埋升跃式智能分类同步回收系统,解决了现有垃圾分类工作烦琐单一、枯燥教学、垃圾角落脏乱影响环境美化、逐一回收垃圾效率低的问题。
1 总体设计
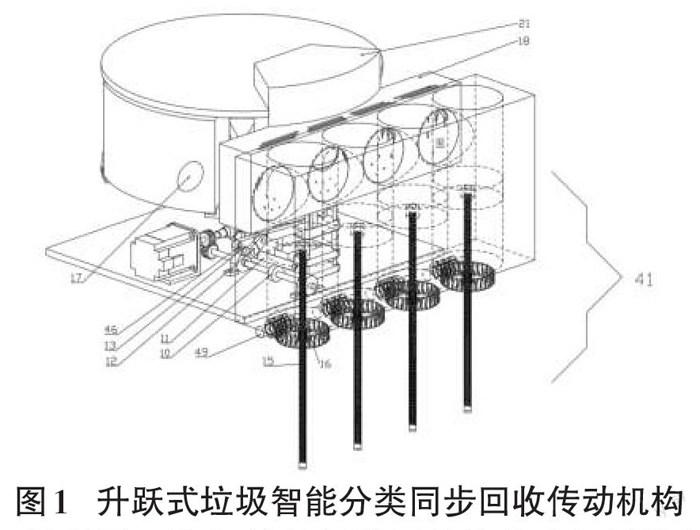
文章从机构传递、硬件控制、软件开发等方面着重介绍该垃圾智能分类回收系统,整体主要包括:智能分类、语音识别、容量检测、同步回收。在整体垃圾投放结构方面(图1所示),基于SolidWorks 软件开发了智能垃圾分类箱投放回收传递系统,该结构具备当无人靠近时,自动转为低能耗休眠状态,当检测到人体靠近时,装置自动感应回收结构启动。该装置的整体传动机构设计如图1所示。
根据图1所示,该垃圾装置整体传动包括的主要模块有:包括语音识别模块、电机控制模块、曲面棱台结构机构模块、导入式曲面棱台结构模块、垃圾分类装置旋转机构模块、上升跃推动机构模块,仅作为投放引导入口通道,作为地面上的垃圾投放口,相交呈X型错开,不同的投放入口对接四条地下滑坡通道直至地底四个不同种类垃圾桶,语音识别垃圾关键词,同时发出指令控制电机转动相应位置,配合间歇旋转机构、向上升跃推动机构,弹出对应投放口,通过斜坡管道,将垃圾引入距离垃圾投放者有一定距离的地下垃圾存储。
2 系统硬件总体结构
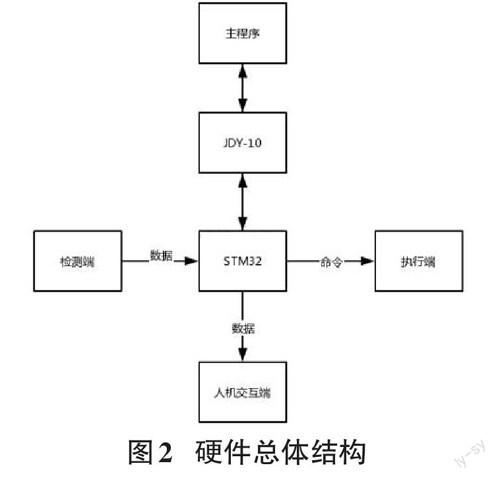
本文硬件系统STM32F103RCT6控制开发板、配备4.0蓝牙JDY-10进行语音信息数据传输;同时,将检测数据回收给小程序,小程序通过JDY-10将命令发送给主控芯片。检测端有:MQ-2烟雾传感模块、火焰传感器模块、光敏传感器模块、声音传感器模块、DS18B20测温模块、GP2Y1014AU粉尘传感器、UVM-30A紫外线传感器模块。执行端有:利用PWM控制数字舵机作为门锁的开关,利用三个驱动控制5个蜗轮蜗杆直流减速电机分别作为门、窗帘、窗户的驱动元件。蜂鸣器作为警报器、LED灯和风扇。人机交互端有:LCD液晶屏显示各项检测端的指标、方便用户查看数据。SYN6288语音模块播报各项指令的执行情况,图2为其系统硬件总设计结构图。
2.1 语音识别模块
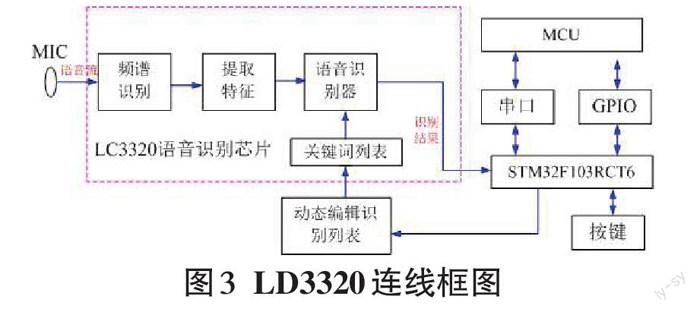
智能分类垃圾桶采用了STM32F103RCT6作为整个系统的控制器,该单片机功耗低,适合语音识别分类系统未使用时的待机,性能好,对步进电机的控制精确,精度满足基本的控制精度要求。为增强人机交互性,本文采用LD3320作为语音识别芯片,开发基于语音识别的语音交互系统和人机操作界面,利用超声波测距算法,实现对垃圾桶内部容量的智能提醒,有效解决了当今智能垃圾桶探测距离不足问题。语音识别系统包括主控芯片板、LD3320 非特定语音识别模块、麦克风以及设置在地面上的垃圾箱容量指示灯,所述的垃圾箱容量指示灯由红外传感器组成,与主控芯片板连接,主控芯片板与动力电机、吹风系统的电机、同步回收装置上升动力电机连接。
如图3所示,该语音识别模块与主控芯片采用串口连接,通过对输入的语音流进行频谱识别、特征提取,并通过匹配关键词进而达到语音辨识的目的,并将识别结果以串口指令方式送入到MCU进行解析处理。
2.2 驱动电机
本机构所选用驱动电机采用图4所示的步进电机,其在本系统中的工作原理为:STM32处理器产生具有一定频率的脉冲信号送入该步进电机,使其2相按顺序变换通电,从而实现精准的步数转动,在步进驱动器输入端有一端接收高低电平,以此控制步进电机的正反转。
双相步进电机中有两个线圈绕组,每个线圈两个头,出线采用是四条线标记为A+、A-、B+、B-。通过控制在双相绕组上输入脉冲的顺序,就可以控制电机的正转/反转 (控制延时就能控制转速)。
2.3 容量检测
为检测各个垃圾桶的容量情况,提高设计的智能化水平,该设计在垃圾桶内胆上方靠周围处安置了超声波测距传感器,对垃圾桶内垃圾现有存储量进行实时测量,从而实时得知垃圾桶内部的容量剩余,当剩余容量低于总内胆垃圾桶容量的三分之一时 ,系统对外发出提示,提醒用户及时更换清空,以此实现垃圾桶的智能化管理。控制系统的抬升垃圾桶内胆装置依靠TB6612驱动的蜗轮蜗杆电机实现;在管道中截断臭味溢出的装置是依靠TB6612驱动的吹风系统风扇电机,TB6612驱动除了接入STM32微控制器的逻辑信号控制端,还接入了微控制器的PWM脉冲端进行调速。图5为设计所采用容量检测电路模块。
3 软件设计
3.1 软件整体设计
驱动主要分为语音识别、容量探测、电机控制3个模块。语音识别模块LD3320与STM32间通过SPI进行通讯,LD3320可动态编辑和识别语音关键词语列表,并把识别关键词语以字符串指令形式传送给芯片。在对主控芯片的I/O编程中,通过接收语音信号到相应控制寄存器,完成识别设定的关键词语辨识识别。它有A/D D/A通道,麦克风可直接接入。与单片机通过SPI通讯,识别非特定语音的关键词后,单片机控制步进电机旋转一定角度。程序设计流程如图6所示,详细控制主流程为:垃圾分类系统开机,在一定时间未操作或未捕获到音频输入时,系统处于待机状态,等待唤醒命令到来,听到唤醒命令“环卫宝宝”时,系统由待机模式被唤醒,并回应“主人请说出垃圾名称”,系统亮红灯,5秒内如果能捕获到语音指令,语音识别模块便发送指令至STM32控制板,由它控制步进电机旋转对应的角度,抬升对应垃圾桶,并语音播报垃圾对应类型,延迟5秒后红灯熄灭;若在唤醒之后5秒内系统未捕获到有效的语音数据,系统继续进入待机状态,等待下次唤醒。
3.2 语音识别及播报
采用语音识别模块LD3320作为声控芯片,该芯片集成了语音识别处理器和一些外部电路,包括 AD、DA 转换器、麦克风接口、声音输出等接口模块。 LD3320语音识别主程序流程如图7所示,LD3320的语音识别顺序为:系统初始化、写入语音列表、语音识别。外界信号通过实时开启或关闭中断允许未完成外界信号的中断响应。在“开始识别”后系统读取寄存器中B2H的值,若为21H则证明系统产生了识别结果。本设计推出语音播报系统,系统运用唤醒功能,采用名字唤醒,类似智能手机的语音助手唤醒,一般情况处于低功耗状态,在一定程度上节省了功耗。该语音系统能指导公民准确投放垃圾,实现垃圾准确分类。
3.3 容量检测
本设计采用超声波测距模块来实现测距,该模块自带温度补偿传感器,其测距精度为2cm~ 4.5m。 首先,设置STM32主控板向超声测距模块的TX 管脚输入一个10μs 以上的高电平信号,通过外发送8个频率为40 kHz的超声波脉冲检测返回信号特征;其次,结合测量温度实现了自动校正;最后,在 Echo 端输出一个持续时间为 T的高电平,借助 T 的数据便可求出前方垃圾箱剩余的容量深度。
4 结论
TM32板驱动LD3320进行语音识别的系统,作为总系统控制步进电机特定的旋转。着重对人们说出垃圾名称的关键字捕捉,从而配合垃圾分类设计的结构,控制步进电机特定转动,在没有捕获到垃圾名称时,垃圾投放口处于封闭状态,防止垃圾未分类而使垃圾混杂。语音识别也处于待机状态;在捕获到名称后,系统控制步进电机旋转特定的角度,配合整体机械设计结构,系统可以推送出一一对应的垃圾分类投放口,指导公民准确投放垃圾,实现垃圾准确分类,并语音播报此时即将投放的垃圾所属类别,准确指导人们垃圾分类,并将人们手持垃圾的所属种类的意识映入公民的脑中,有效指导垃圾分类和分类意识的形成,提高了垃圾回收率。
参考文献:
[1] 潘丽,贾冕茜.基于机器学习的智能垃圾分类系统设计[J].西昌学院学报(自然科学版),2022,36(2):74-77,124.
[2] 王鹏程,胡成,刘兴云.垃圾分类系统中的用户端设计[J].湖北师范大学学报(自然科学版),2022,42(2):72-78.
[3] 焦鍵.基于语音识别的单片机垃圾分类系统设计[J].集成电路应用,2022,39(2):66-68.
[4] 冯万雷,刘耀龙,吴国峰,等.基于单片机控制的智能语音垃圾分类系统[J].电脑知识与技术,2021,17(35):110-111,114.
[5] 王雪,叶长青,杜雨洋.基于树莓派的智能垃圾分类桶设计[J].电脑知识与技术,2021,17(25):114-115,120.
【通联编辑:唐一东】
收稿日期:2022-06-15
基金项目:湛江市科技局科技攻关项目(2019B01155)
作者简介:陈秀龙(1999—) ,男,本科生,研究方向为机械电子工程;通信作者:靳其宝(1975—) ,男,讲师,博士,研究方向为机电系统控制与自动化、机电液装备系统集成技术、智能控制。
猜你喜欢
科技创新与应用(2017年3期)2017-02-18
中国新通信(2016年21期)2017-01-06
电脑知识与技术(2016年12期)2016-06-14
物联网技术(2015年9期)2015-09-22
现代电子技术(2015年11期)2015-07-28
现代电子技术(2015年8期)2015-07-09
电子技术与软件工程(2015年6期)2015-04-20
无线互联科技(2015年2期)2015-04-02
物联网技术(2015年3期)2015-03-31
软件导刊(2015年1期)2015-03-02
