卫星扩频测控基带系统设计
2022-10-20 10:20鲍大志邢斯瑞孙伟韩旭天
电子技术应用 2022年9期
鲍大志,邢斯瑞,孙伟,韩旭天
(长光卫星技术股份有限公司,吉林 长春 130102)
0 引言
测控应答机是卫星与地面之间的遥控指令与状态遥测信息的联络单机,主要负责遥测、遥控信号在卫星与地面站之间的传输。早期测控应答机多为统一S 波段(USB)测控应答机,由于S 频段不对商业测控开放,且USB测控在设备适应性、抗干扰性、可靠性等指标上难以保证,目前商业航天中,X 频段扩频测控正成为主流测控方式,并且频率上有向更高频段发展的趋势,以满足对测控自主性、抗干扰性、保密性等方面的需求[1-3]。
由于卫星高速运动,卫星测控信号具有高动态的多普勒效应。同时由于相对于传统的S 测控频段,X 频段频率更高,多普勒效应更加明显。因此,实现高动态信号的捕获跟踪是扩频测控信号处理的关键。此外,由于扩频测控体制采用非相干扩频,使得捕获跟踪的难度进一步增加,且解扩后信号需要独立位同步算法实现数据恢复。
本文按照低轨卫星扩频测控应答机需求,构建了一套扩频基带解调和调制系统。其中解调器主要组成部分包括二维捕获、载波跟踪、码环跟踪、位同步等模块。本文给出了扩频测控应答机系统架构和基带系统关键模块的算法结构,并给出了仿真测试结果。
1 整体架构
本文中测控应答机的硬件架构按照功能可划分为射频模块、采集模块、基带模块三部分。射频模块主要完成信号的接收和发射、收发信号的变频和功率放大功能。射频模块将变频后的中频信号输出到采集模块,并接收采集模块传来的基带信号进行变频发射。采集模块一方面完成中频信号模数转换,将采样信号送给基带模块;另一方面接收基带模块的调制数据,完成数模变换,将模拟信号发送给射频模块。基带模块主要完成基带调制解调和遥控遥测信息处理等功能,测控应答机的组成如图1 所示。

图1 测控应答机组成框图
扩频测控基带系统在基带模块中利用FPGA 实现,主要分为调制器和解调器两部分。系统整体框架如图2所示。

图2 基带系统组成框图
调制器接收来自中心机的二进制遥测数据,经过比特映射、扩频、插值成型滤波后,上变频到中频输出。解调器中,中频信号在采集模块完成A/D 采样后,输入基带系统,采样得到的数字序列在基带模块内先后完成正交下变频、频率和扩频码相位二维捕获、载波与码相位跟踪、解扩、遥控数据位同步和BPSK 解调,得到比特流,供后续模块进行遥控指令识别和处理[4]。
本文中系统的基本指标为:采样率和系统工作时钟均为40 MHz,解调器遥控速率为16.384 kb/s,调制器遥测速率为16 kb/s,扩频码速率为3.069 Mb/s,扩频码为码长为1 023 的Gold 码,采用PCM-CDMA-BPSK 调制方式。下面对系统中的关键模块进行详细描述。
2 二维捕获
在对接收信号通过环路进行跟踪之前,先要对信号进行二维捕获,粗略估计出接收信号的残余载波频率和码相位。常规扩频信号搜索方式对每个码相位和载波的组合进行串行遍历搜索,搜索速度过慢,且无法适应卫星信号高动态变化的情况。常用的并行搜索方法包括并行码相位搜索和并行频率搜索[5-7]。为了提高搜索速度,还可以叠加硬件资源,增加搜索器数目。
由于扩频测控应答机采用了码长1 023 的Gold 码作为扩频码,码捕获偏差不能超过0.5 个码片,因此码相位的搜索数目至少为2 046 个,远多于需要搜索的频点数目,因此采用了并行码相位捕获。并行码相位二维捕获算法结构如图3 所示,通过载波NCO 实现对不同频偏的遍历,对信号和扩频码的FFT 结果相乘,对相乘结果进行IFFT 并取模值,可一次性求得所有码相位的相关值,取相关值最大值与判决门限比较,判定是否捕获成功。根据卫星轨道与频率可推算测控系统多普勒频偏范围以控制频率搜索范围,减少非必要搜索,提高捕获速度。

图3 并行码相位二维捕获
FFT 和IFFT 在点数为2 的整数次幂的情况下,效率最高,由于测控系统采用码长为1 023 的Gold 码作为扩频码,每个码片采样两个点,一个码片周期采样点数为2 046,对采样信号补零,使得补零后采样点数长度为2 048,然后再进行FFT 和IFFT 运算,可以优化FFT 和IFFT 的资源占用与运算速度。由于星上扩频码是确定的,不需要实时更改,对于扩频码的FFT 变换结果,可以存储起来,不需要实时计算,降低资源占用。
为了提高搜索速度,同时不增加资源使用,选择在高于码片速率的高速时钟下进行二维捕获运算。本系统中,码片速率为3.069 Mb/s,捕获运算工作在系统时钟40 MHz 下。但是这会带来码片速率和搜索运算速率的不匹配,为了解决问题,将一个扩频码周期长度的采样数据存储,供二维搜索使用,这样可以大幅提高搜索速度。
由于扩频测控为非相干扩频,一个扩频周期内可能存在数据跳变。由于比特数据跳变的原因,在载波频率的最佳搜索点,相关值可能并不取得最大值,而在载波频率偏差一定值附近获得最大相关值,这是由于载波频率偏移导致载波周期和数据跳变周期一定程度上重合造成的。这种情况可以利用解扩后信号利用FFT 对捕获频率进行二次确认。如载波频率偏差在载波环路牵入范围内,也可以直接利用载波环路跟踪。本文综合分析了卫星测控相关指标后,选择直接利用载波环路对载波偏移进行跟踪,以降低系统复杂度,提高捕获速度和捕获的高动态适应性。
3 载波跟踪
由于卫星测控信号多普勒变化速度快,且测控指令具有突发性,在载波跟踪部分,为了提高跟踪能力,同时实现环路快速收敛,采用了锁频环辅助锁相环形式[8-10],算法结构如图4 所示。

图4 锁频环辅助锁相环载波跟踪
解扩后信号通过积分清除,得到4 倍符号速率数据,进入锁频环(FLL),然后对数据进行位同步。利用位同步输出作为锁相环(PLL)输入数据,提高锁相环稳定性。将锁频环的输入数据定为4 倍数据速率,虽然一定程度上扩大了噪声带宽,增大了噪声水平,但是由与锁频环相比较于锁相环,能跟踪信噪比更低的信号,同时动态性能较好,这样做可以有效扩大锁频环的牵入范围和动态跟踪能力,使得环路有足够能力应对高动态信号的跟踪。而锁相环则利用位同步后的信号完成精密跟踪,使得整个载波环路具有良好的适应性。
锁频环采用叉积鉴频器,叉积鉴频器运算量较小,同时对数据跳变不敏感。滤波器选择2 阶环路滤波器。
叉积自动频率跟踪算法的鉴频器形式如下:
I、Q 两路信号的点积和叉积分别定义为:

其中,k 为采样点序号,I(k)和Q(k)为采样信号。
鉴频器输出V(k)定义为:

锁相环则采用二象限反正切鉴相器,鉴相效果最准确,且对数据跳变不敏感。环路滤波器采用3 阶滤波器。
反正切鉴相器定义如下:

4 码环跟踪
为了实现信号接收,需要在本地复制和接收信号完全对齐的扩频码。为了复制扩频码,先要通过捕获获得扩频码的初始相位,然后通过码环路跟踪使得本地扩频码相位和接收信号扩频码相位始终保持一致,码环跟踪利用延迟锁相环路实现[11-12]。
由于扩频码采用的Gold 码具有良好的自相关性,当本地扩频码与信号中的扩频码完全对齐时,自相关函数有明显相关峰,码片偏移后,相关峰会迅速衰减。因此,通过在相反方向上对扩频码分别偏移半个码片获得超前码和滞后码,利用两个偏移的扩频码解扩信号后得到的相关值即可估计扩频码偏移情况,算法结构如图5 所示。

图5 延迟锁相环码环跟踪
鉴相器用于估计扩频码偏移,鉴相器输出δ 为:

其中,E 为超前码相关值,L 为滞后码相关值。相关值通过积分清除计算得到,积分清除部分包括相干积分和非相干积分。对于相干扩频,相干积分长度常设定为整数个扩频码周期。由于扩频测控为非相干扩频,在一个伪码周期内可能存在多次数据比特跳变,因此相关长度不应设定为整数个伪码周期。本文中,伪码速率为3.069 Mb/s,比特速率为16 kb/s,一个数据比特对应的码片长度为191.812 5。这里选择相干积分相关长度为96 个码片长度,约为比特周期的1/2,可以保证连续两个相干积分周期内至少有一个周期没有数据跳变;非相干积分周期选为2 个相干积分周期,这样以保证每个跟踪周期内的测量值的有效性,同时最大化码环的动态适应性。
由于多普勒效应产生的载波偏移和码率偏移有着固定的比例关系,且载波环路的稳定性远高于码环路,因此,采用载波环路辅助码环路跟踪。将载波环路滤波器的输出值乘以一定的比例值,作为码环辅助值。本文中由于载波环为锁频环和锁相环的组合,因此载波环路滤波器输出为锁频环的环路滤波器与锁相环环路滤波器输出之和,比例值为码速率和载波频率的比值。
5 捕获跟踪状态转换
捕获状态向跟踪状态的转换以捕获值超过捕获门限作为标准。捕获门限的计算按照以下方式:对捕获周期内的采样数据逐一求绝对值,对绝对值进行累加,累加结果乘以一定比例α 作为捕获门限。为了提升捕获概率,以捕获结果多次超过门限值作为捕获成功条件,次数A 和比例值α 需要综合考虑对捕获检测概率和虚警概率的要求选取。捕获状态判定方法如图6 所示。

图6 捕获状态判定
以解扩后码片数据进行相干积分和非相干积分后的计算值是否超过门限作为跟踪环路是否锁定的判定条件,跟踪门限则以码片数据绝对值的积分值乘以一定比例μ 取得。跟踪状态判定方法如图7 所示。

图7 跟踪状态判定
相干积分值设定为96 码片,保证连续两个相干积分周期至少有一个周期没有数据跳变,非相干积分长度可以设定为较大值,以降低噪声影响,但是不宜过大,否则锁定判断的更新周期会过长。计算跟踪门限的积分长度应该与非相干积分加相干积分的码片周期数一致。比例值μ 则需要综合考虑检测概率和虚警概率的要求进行选取。
6 位同步
由于扩频测控体制为非相干扩频,码片周期和比特周期无整数倍数关系,且一个码片周期内可能存在多次比特跳变,因此,对码片同步后不能直接通过解扩获得解调数据,需要对数据进行位同步[13]。本文位同步采用了Gardner 算法,算法主要由4 部分组成:内插滤波器、定时误差检测器、环路滤波器和控制器,算法在不改变本地时钟的同时能够实现位同步[14]。Gardner 算法同步过程如下:接收端以本地时钟Ts对接收信号重新采样,送入内插滤波器进行内插值的计算,其结果经定时误差检测器输出检测误差,再送入环路滤波器滤除带外噪声,最后送入NCO 控制器计算内插基点和分数间隔,进行下次内插位置的调整,如此循环往复,从而在最佳采样时刻内插出准确的判决值。算法实现流程如图8 所示。

图8 Gardner 算法的实现流程
Gardner 算法的输入数据采样率应为比特速率的2倍以上,对于Gardner 算法的输入数据产生,通过对解扩后的采样数据相干积分并进行匹配滤波得到,通过相干积分得到4 倍比特速率的积分数据。为了增强解调的稳定性,对积分后数据进行数字AGC 处理。之后,为了进一步滤除带外噪声并减少干扰,采用了匹配滤波,如果解调输入信号使用成型滤波器,则匹配滤波器采用与成型滤波器相匹配的滤波器;如果输入信号不采用成型滤波器,匹配滤波器可采用积分滤波器,积分滤波器系统函数为:

7 仿真
参照长光卫星吉林一号卫星测控指标和链路情况,设定了低轨X 波段扩频测控接收机的仿真条件。多普勒初始值为150 kHz,载波频率为7 239 MHz,多普勒变化率为15 kHz/s。发射机无成型滤波器,AWGN 信道下,扩频后Eb/N0 为-7 dB,信号采样率为40 MHz。
捕获过程中,设定门限比例α 为0.12,进行多次连续捕获运算。捕获结果如图9 所示,两个值分别为捕获门限和捕获过程中的捕获运算值,捕获峰值始终在门限之上,捕获算法具有良好的捕获性能。

图9 捕获结果仿真图
载波跟踪中锁频环环路滤波器归一化带宽设定为0.02,锁相环的环路滤波器归一化带宽设定为0.03,图10所示为频率跟踪情况。

图10 载波跟踪环路仿真图
经过初期的牵入后,载波跟踪环路逐渐稳定,并且可以稳定跟踪15 kHz/s 频率变化率的多普勒频移。
对载波环辅助的码环路进行仿真,码环路的环路滤波器归一化带宽设定为0.02,由于码环路短期波动很大,直接仿真码环路的滤波器输出很难分析码环路的跟踪情况。将连续220次码环路输出进行平均,对结果进行仿真,结果如图11 所示。

图11 码环跟踪环路仿真图
可以看到,经过初期牵入后,码环路逐渐稳定,归一化频码速率偏移输出和设定的多普勒频移计算出的结果相一致。
位同步环路输入信号采样率为4 倍符号速率,分数间隔uk在初期波动后快速收敛,成功实现位同步,如图12 所示。位同步的环路滤波器归一化带宽为0.003,如图13 所示。

图12 位同步环路分数间隔uk 仿真图
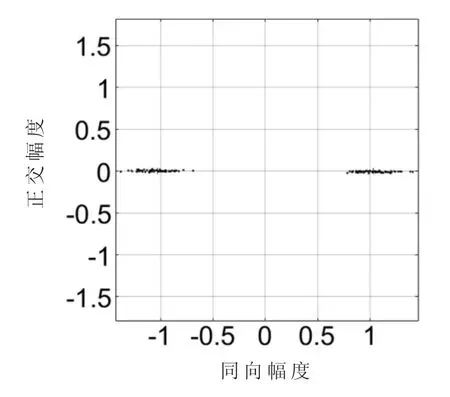
图13 解调星座图仿真图
Eb/N0 约为14.5 dB,满足解调损失小于3 dB 的解调要求。
8 结论
本文参考吉林一号卫星相关测控指标,设计了一套X 频段扩频测控应答机基带系统。在二维捕获上,采用并行码相位搜索,并通过暂存采样数据配合高速时钟,实现了对搜索速度的进一步优化;载波跟踪上,采用二阶锁频环辅助三阶锁相环,满足了对高动态信号的跟踪需求;码环路上,采用载波环路辅助码环路,增强了码环路的稳定性和高动态适应性;位同步环路上,采用采用数字AGC 和匹配滤波器,增强了解调稳定性。系统在多普勒频偏150 kHz、多普勒变化率15 kHz/s 的高动态下,能够实现正确解调,解调损失小于3 dB,可满足X 频段上低轨卫星的测控需求。
猜你喜欢
无线互联科技(2022年4期)2022-05-11
智慧电力(2022年1期)2022-03-02
河北工业大学学报(2021年4期)2021-09-23
中国电子报(2019年55期)2019-10-24
电脑报(2019年8期)2019-09-10
通信产业报(2019年26期)2019-08-30
电子技术与软件工程(2019年10期)2019-07-20
中国新通信(2016年12期)2016-08-09
电脑知识与技术(2015年23期)2015-11-13
现代电子技术(2009年14期)2009-09-05