农业机械卫星定位校正方法研究
2022-10-20 14:59:50夏利利卞兆娟
南方农机 2022年20期
夏利利 , 卞兆娟
(江苏省农业机械试验鉴定站,江苏 南京 210017)
0 引言
乡村振兴战略是解决我国“三农”问题、优化社会经济发展模式的根本路径,乡村振兴战略目标的实现,离不开农业机械设备的支撑[1]。随着科技的发展,农业机械设备自动化成为当前农业科技创新的热点领域[2]。其中,农业机械的高精度定位是农业机械设备自动化的重要基础,其在全球范围内的应用正在迅速增长。卫星定位技术是获取农机田间位置的关键技术,利用精确的卫星定位技术能实现农机位置的精确获取,在农业机械中安装卫星定位终端后,卫星终端可通过与多个卫星的连接实现定位[3],并在地面卫星基站的定位修正下实现厘米级的定位精度[4],具有操作性强、应用范围广等优点。但是高精度定位产品几十万的高昂价格,使得这种高精尖的定位技术在农业领域的应用尚不广泛[5]。随着农业自动化技术的发展,人们对经济的高精度定位校正方法的需求变得日益迫切。
为了提高农业机械的定位精度,许多学者在这一领域进行了研究,并取得了一定的进展。王壮等[6]认为对导航中GPS定位误差分析,可采用目前应用比较广泛的差分技术及联合卡尔曼滤波算法。刘进一等[7]为解决实际农田环境中农业机械自动导航系统的位姿信息易受跟踪卫星数动态变化、天线遮挡、数据传输错误等因素影响,造成定位精度和稳定性变差的问题,提出了基于GNSS/MIMU/DR的农业机械组合导航定位方法,使其各项评价指标得到了明显的改善。
为了解决高精度RTK设备价格昂贵的问题,刘国有[5]以农田导航的实际应用为首要目的,以美国Swift公司的Piksi定位模块为基础,构建RTK系统进行研究,使用滤波算法对数据进行处理,最终成功将PiksiRTK系统应用在农田拖拉机上。此外,吴超[8]、吴东明等[9]、吴赛敏[10]提出基于视觉和GPS导航的组合导航方法,结合两者的优点来提升定位精度,进一步提升导航定位的精度。针对导航卫星会由于各种原因出现定位误差的问题,本文提出预测轨迹定位校正法来提高农业机械的定位精度,使其能够在以后的农业生产中得到应用。该方法通过安装在农业机械上的GNSS接收器对农业机械进行定位,并对其接收到的坐标进行一次预测校正,随后又测量一次校正轨迹与期望轨迹之间的偏差,再根据偏差进行二次校正。
1 农业机械卫星定位校正系统概述
1.1 系统通信架构
全球定位技术既用于精准农业系统实施的初始阶段,也用于后期阶段。初始阶段主要包括坐标定位,后期阶段主要包括并行驾驶、控制和核算油耗、农机状态监测等。为了实现这些功能,必须使得至少两个设备联合工作:一个GNSS接收器和一个用于从GNSS接收器收集和处理信息的集中式服务器。系统组件之间交互的总体组织方案如图1所示。

图1 系统组件交互图
在该方案中,可以分配3个部分,每个部分应用不同的通信技术和协议:
1)在全球导航系统的卫星和安装在设备中的GNSS接收器之间,使用标准GPS NMEA-0183协议。
2)在GNSS接收器和服务器之间,使用Wialon IPS 1.1协议。GNSS接收器主要将其坐标及其运行所需的参数通过Wialon IPS协议传输到服务器,如移动开始后的时间、卫星数据的可靠性系数(HDOP)、加速度传感器的值、车载网络的温度和电压等。
3)服务器和用户之间的区域是通过HTTP或HTTPS与网络服务器的标准连接。
1.2 Wialon IPS协议的双向授权
Wialon IPS在GNSS接收器和服务器之间支持双向数据传输。通常,从GNSS接收器到服务器,传输GNSS接收器坐标和前面描述的其他参数;从服务器到GNSS接收器则传输控制命令。为了数据安全和数据的准确性,保证农业机械的精准定位,系统使用了基于Wialon IPS协议的双向授权。
根据Wialon IPS协议,在建立连接时,GNSS接收器首先发送一个登录数据包用于对服务器的访问,其中包含GNSS接收器的唯一标识符,通常是密码和国际移动设备标识。服务器对登录数据包进行解析匹配,并将其存储在服务器的数据库中。在服务器成功匹配了GNSS接收器发送的数据包后,服务器向GNSS接收器发送授权信息,然后服务器等待接收GNSS接收器的信息,当服务器接收到正确的信息后,双向授权完成,允许双向交换数据。
2 农业机械卫星定位校正试验
本次试验使用了UM220北斗模块及其配套天线作为北斗定位接收设备和基于北斗卫星数据的相关控制器。试验的农业机械为拖拉机,并且配备了上述GNSS接收器和控制系统,同时配备农机辅助导引系统来校正定位误差。农机辅助导引系统的主要原理为预测轨迹定位校正法。
2.1 预测轨迹定位校正方法
预测轨迹定位校正法的示意图,如图2所示。该方法利用全球导航卫星定位精度的历史数据,基于大数据和神经网络算法可以预测出全球卫星导航系统对农业机械的定位精度,根据预测定位精度和期望轨迹可以预测出校正前实际轨迹大概的坐标,校正前的实际轨迹与期望轨迹的误差很大,因此必须对此时的实际轨迹进行坐标校正。首先,根据预测定位精度对实际定位坐标进行修正,使实际定位坐标校正到与期望轨迹相近的坐标,这一过程称为一次校正,得到的曲线称为一次校正预测轨迹。在一次校正完成以后,进行二次校正,二次校正通过测量一次校正预测轨迹与期望轨迹之间的误差,假设期望轨迹的坐标为(X0(t),Y0(t)),一次校正预测轨迹的坐标为(X1(t),Y1(t)),可以根据以下方程式确定每次测量时一次校正预测轨迹与期望轨迹的误差(bias(t)):

图2 预测轨迹定位校正法示图

然后对误差进行实时修正,以此来校正农业机械的定位精度,二次校正后得到的轨迹即农业机械实际的运动轨迹。从上述论述中可以看出,预测定位精度是相对于GNSS接收器而言的,因此GNSS接收器的位置应该置于期望轨迹之上,因此本试验将GNSS接收器设置在农业机械的中间位置。
2.2 定位校正分析
本研究首先使用了基于北斗信号接收器的智能设备定位法进行试验,通过这一试验可以得到北斗导航卫星定位精度的大量数据,根据这些定位精度数据,使用神经网络算法预测出初始的定位精度;随后的预测定位精度由两部分数据共同产生,一部分是上述的定位精度数据,另一部分是农业机械运动过程中前一时刻的定位精度数据。
在此试验的基础上,结合农机辅助导引系统再次进行试验。两次试验分别重复进行两次,以此来保证试验的可靠性,在50个辅助观测点处分别记录一次校正后的轨迹、二次校正后的轨迹与期望轨迹的偏差,以此来评估预测轨迹定位校正法,其试验结果如图3、图4和图5所示。
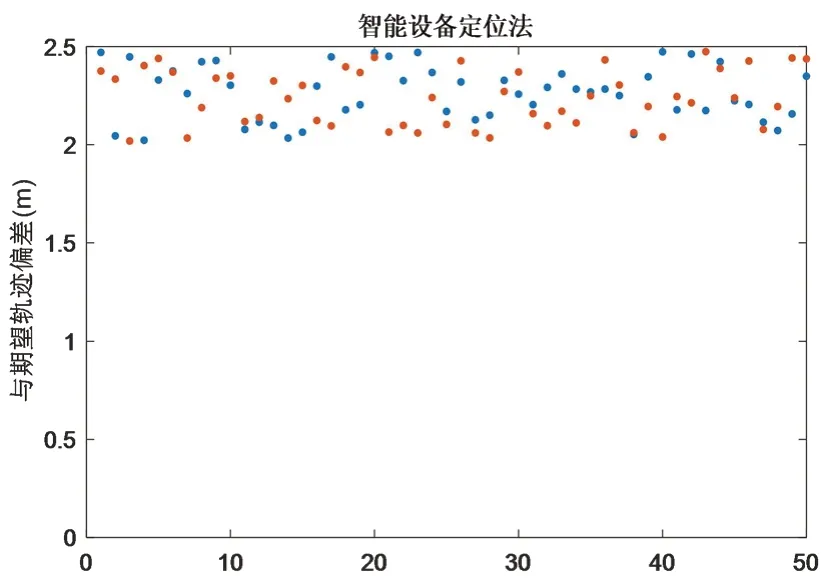
图3 智能设备定位法校正精度
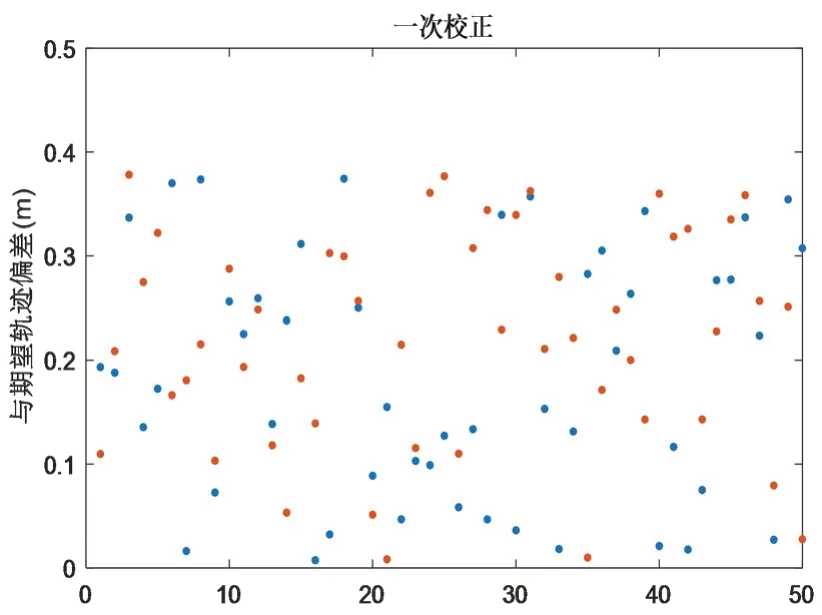
图4 一次校正校正精度
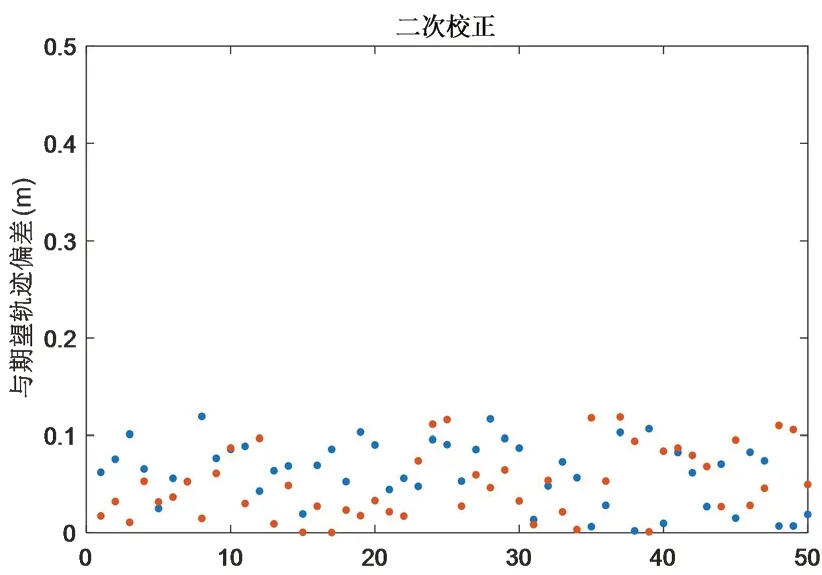
图5 二次校正校正精度
图3的试验结果是使用基于北斗信号接收器的智能设备定位法的结果,其主要反映了北斗卫星导航系统的定位精度在2.3 m左右,这为后续定位精度的预测提供了大量的数据。图4的试验结果是进行一次校正后得到的结果,从中可以看出,一次校正大幅度降低了与期望轨迹的误差。图5的试验结果是二次校正后的结果,也即校正后的实际轨迹与期望轨迹的偏差,从中可以看出,此时的定位精度已经可以满足农业机械的正常作业了。因此,预测轨迹定位校正法的效果值得肯定。
3 总结
本研究首先对农业机械卫星定位校正系统进行了概述,介绍了其主要的通信协议以及为了数据安全而开发的一种基于Wialon IPS协议的双向授权算法。在此基础上,在农机辅助导引系统中运用了预测轨迹定位校正法,对只有北斗信号接收器的农机进行测试,然后对配有农机辅助导引系统的农机进行测试,通过两次试验结果的对比,得出预测轨迹定位校正法可以显著降低定位误差,提高定位精度,满足农业机械的正常作业。如果要进一步提升农业机械的定位精度,笔者认为需要进行更多试验,积累更多的试验数据,进一步对神经网络算法进行优化训练,从而提升对北斗卫星定位系统定位精度的预测,进而优化一次校正的预测坐标,最后改善二次校正的精度。
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
四川农业与农机(2019年4期)2019-08-29 06:06:06
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
铁道通信信号(2018年8期)2018-11-10 05:15:48
南方人物周刊(2017年25期)2017-08-25 06:06:50
工业设计(2016年7期)2016-05-04 04:02:20
工业设计(2016年4期)2016-05-04 04:00:25
上海铁道增刊(2015年1期)2015-03-23 09:25:02
河南科技(2014年1期)2014-02-27 14:04:26