
基于ISO 19206 标准的目标物关键技术及应用分析
2022-10-20 02:27:52蒋熊力忍肖广宇郑宏
时代汽车 2022年20期
蒋熊力忍 肖广宇 郑宏
中汽研汽车检验中心(天津)有限公司 天津市 300300
1 前言
随着汽车制造行业的发展,越来越多的新方法、新技术应用于汽车产品,从驾乘体验到生态环保,从被动安全到主动安全,汽车应用技术不断得到更新和优化。其中,主动安全技术成为了现阶段汽车行业及相关学者尤为关注的方向。具备主动安全功能的汽车,拥有比较高的规避事故的能力,尤其在突发情况下,能极大的保障人身财产安全,受到广大使用者的青睐。
具备主动安全功能的汽车产品测试离不开主动安全目标物。主动安全目标物能有效的模拟道路交通环境中的人、自行车、踏板车及3D 乘用车,从形状尺寸到反射特性,目标物与之保持高度一致性,从而保证了测试的有效性。目前,在主动安全测试中,主动安全目标物的产品主要是引用国外相关目标物产品。
2 主动安全目标物研究现状
现阶段我国使用的主动安全目标物主要依赖于从国外进口,主动安全目标物制备的核心技术被国外少数公司所垄断。随着我国主动安全技术的发展,特别是随着涉及到主动安全目标物相关国标的起草制定,使得针对主动安全目标物的研究变得尤为重要。
目前,国内有少数研发机构和高校针对主动安全目标物进行了相应的研究,但在产品的开发及验证方法等关键技术方面,并未取得较大突破,其主要原因是,在产品开发设计、产品验证方案上,缺乏ISO等标准的基础溯源,同时,对于产品的基础性试验数据库的掌握不足,导致产品的被认可程度不高。
主动安全目标物主要包括行人、二轮车及乘用车,其主要构成分为覆盖物、填充物、骨架及运动机构等。其物理属性、形状尺寸、材料配比、制备工艺、机构设计等都对目标物的性能会产生影响。
通过对目前检测机构使用较多的目标物进行研究发现,其产品性能及标定方法的参考依据主要来自ISO 19206《用于评估主动安全功能的目标车辆》中第一、二、三、四部分。其中,ISO 19206-1主要是对乘用车后端目标物的要求,ISO 19206-2 主要是对行人目标物的要求,ISO 19206-3 主要是对3D 乘用车目标物的要求,ISO 19206-4 主要是对自行车目标物的要求。
3 基于ISO 19206 的关键技术分析
3.1 视觉及光学性能
3.1.1 行人目标物
行人目标物为非反射性的皮肤颜色,目标物头发可以用假发代替或者采用其他方式在头部设计中进行整合。目标物的上衣应为黑色T 恤,裤子为蓝色牛仔裤。衣服应由防撕裂、防水材料制成,其衣服材料推荐依据标准如下表1 所示。

表1 衣服材料依据标准
其中,AATCC127为静水压试验;ASTM D5034 为纺织物断裂强度和伸长率标准试验方法;AATCC 169 为纺织品耐候性测试标准;ASTM D3884 为纺织品耐磨性试验方法。
行人目标物衣服的红外反射率应在40% 至60% 之间。可见皮肤表面部分的红外反射率也应在40% 至60% 范围内。目标物假发的红外反射率范围为20% 至60%。应确保在选择衣服时,45°传感器和90°传感器测量的红外反射率差异不超过20%。
3.1.2 二轮车目标物
所有反射部件包括:前反射部件、后反射部件、踏板反射部件均应符合标准BS 6102-2(自行车反光装置光学要求和物理要求规范)中要求。前后反射部件距离地面高度范围为350mm 至900mm 之间。车轮反光条应为位于轮辋或轮胎两侧的白色反光条,加强绳的颜色应为浅灰色,且具有低光学反射特性。二轮车目标物红外反射率如下表2 所示。
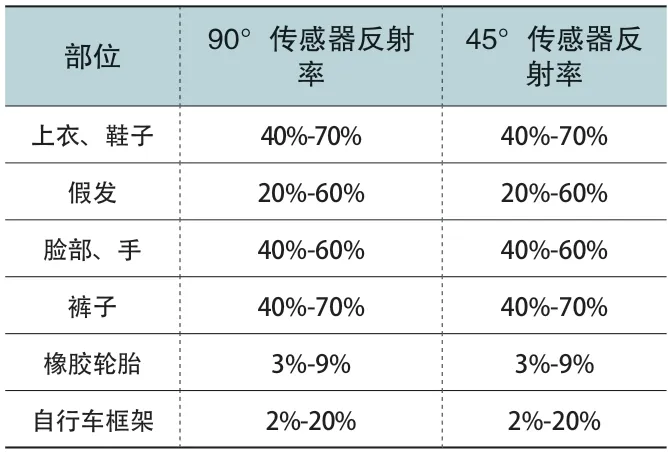
表2 二轮车红外特性反射率
3.1.3 乘用车目标物
乘用车目标物在5m/s 的侧风下,不应出现不符合实际的颤振,在与基准面垂直的局部颤振不应超过10mm,同时,乘用车目标物在任何方向上的变形不得超过25mm。观察视角为从车辆前方纵平面开始(0°),每隔30°为一个视角,直至180°。
乘用车目标物的轮廓应能代表B 级和C 级车,且具有高度垂直对称性,其颜色与纹理不应与背景重合。目标物应满足底盘和道路地面之间间隙约200mm。目标物车牌应在尺寸、颜色、位置、反射率方面能代表实际车牌,或使用实际的车牌。乘用车目标物应包括反光镜和尾灯,在尺寸、颜色、位置和反射率方面能代替真实的部件。乘用车目标物红外特性反射率如下表3所示。
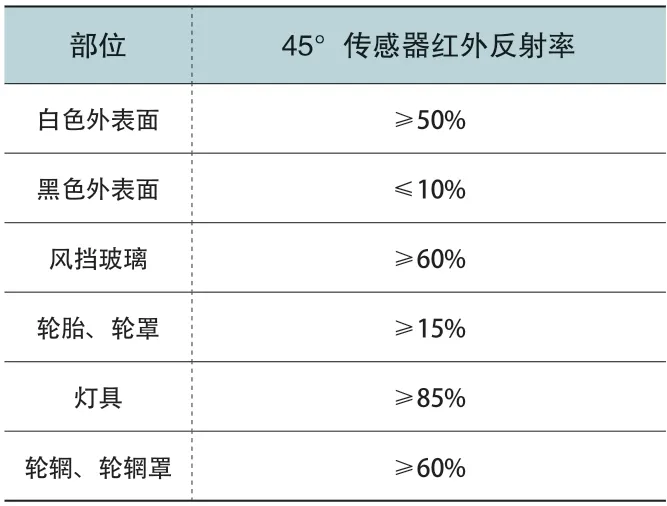
表3 乘用车目标物红外特性反射率
3.2 雷达散射截面特性测量
目标物的雷达特性主要是指其雷达散射截面,即RCS。雷达散射截面为目标在单位立体角内向接收端处散射功率与入射波在目标上的功率密度比值的4π 倍。
3.2.1 行人目标物
在对行人目标物进行测量时,雷达与地面的垂直距离为500mm±150mm,在中心线上的偏差为±100mm,在中心线上的水平和垂直方向的偏差为±1°。车辆行驶偏差量小于2°,纵向和横向的位置偏差小于50mm。行人目标物的横向及纵向偏差小于10mm,其在移动方向上的的角度偏差小于3°。
测试周围环境中,应不存在可能会影响测试结果的建筑物、金属及强雷达反射的物体等。雷达反射器的安装高度为1m,使用雷达反射器在40m 处测量的参考值为10dBm。
对行人目标物的测量范围为4 至40 米,测量可以沿任意方向进行。其中,测量时应保证连续测量,测量速度应保持稳定,避免突然加减速,约为10km/h。行人目标物的测量场景示意图如下图1 所示,横向场景包括从2 到4,以及从4 到2,纵向场景为从1 到3,以及从3 到1,测试场景中,每个方向需要测量5 次。
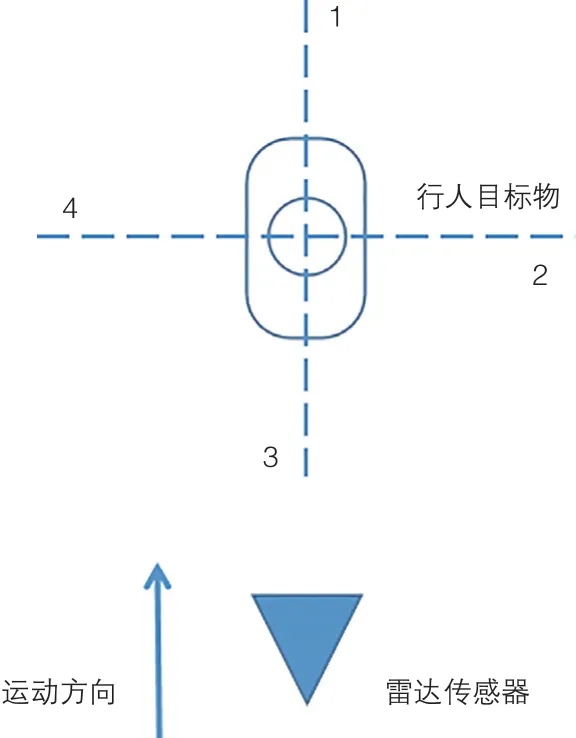
图1 行人目标物测量场景示意图
3.2.2 二轮车目标物
二轮车目标物的雷达散射截面特性测量的方法与行人目标物的方法基本一致。二轮车目标物的车架、辐条、转向机构、轮辋等结构的反射特性,应能代表真实二轮车的雷达反射特性。辐条之间的空间部分应保证,从任意视角测量,都不应产生雷达反射。在90°的视角下,每个车轮的RCS 值约为1 至10dBm,车架的RCS 值约为1 至16dBm,二轮车目标物骑手的RCS 值约为-5dBm至5dBm。
3.2.3 乘用车目标物
乘用车目标物测量雷达散射截面特性的方法主要分为两类:固定距离变视角的测量方法和固定角度变距离的测量方法。
固定距离变视角的测量方法。
固定距离测量是为了从各个角度来获取乘用车目标物的雷达反射率。为了减少多径效应(指电磁波经不同路径传播后,各分量场到达接收端的时间不同,按各自相位相互叠加而造成干扰,使得信号失真,或者产生错误),在30 米的范围内,在230mm±10mm,480mm±10mm,900mm±10mm 三个传感器高度进行测量。测量应从0°至180°进行连续测量(或者从0°至360°更优),传感器的移动速度应保证每个角度有5 个测量样本。传感器的移动速度可根据如下公式进行计算:


固定角度变距离的测量方法。
固定角度测量的目的是描述当传感器接近目标物时,雷达反射率的整体幅度降低情况。雷达反射率的变化是由多个因素引起的,包括乘用车目标物反射率分布变化、传感器测量的视角等。
该测量方法的范围为5m 至100m,传感器移动的最大速度应保证每米至少有5个测量样本。传感器的移动速度可根据如下公式进行计算:


4 主动安全目标物的应用分析
主动安全目标物的技术发展依赖于相应测试设备、测试技术的提升。汽车传统测试主要是对安全、排放、噪声和灯光等方面进行评估,通过检测相应的性能,减少行驶中的安全隐患,其测试方法主要分为台架试验、道路测试及试验场测试。传统测试和主动安全测试在试验设备方面存在较大差异,其主要区别为主动安全测试的设备更加多样化。主动安全技术的发展主要来源于各类新技术的引用、结合、开发及提升,如:雷达技术、材料工艺、通讯技术、非标设计、测试验证、校准技术、量值溯源、场景配置等。
国内主动安全目标物的发展较国外滞后,其主要原因为国内主动安全起步时间较国外晚,同时,在发展的过程中,主要依赖于国外的成熟技术,对于一些标准的研究不足,对于基础测试数据积累不充分,因此,在对主动安全目标物的开发研究过程中,会面临一些“卡脖子”的问题点。目前,国内各大检测机构及主机厂所使用的主动安全目标物,基本为国外部分供应商的产品,但是,国外的主动安全目标物是以国外道路交通环境为依据所开发的,与中国交通特征有所不同,针对该问题,国内也有部分研究机构针对国内交通环境对目标物进行了一些开发研究工作。
通过对ISO 19206 标准及国内主动安全目标物开发现状的研究中发现,主动安全目标物的开发主要依赖于雷达测试技术的量值溯源、国内主动安全目标物的替代参数统计、材料物理特性的测试数据积累、目标物制备工艺等方面。
主动安全目标物能有效地模拟真实交通环境参与者的红外反射特性、雷达反射特性等信息,随着国内主动安全技术工作者在该领域投入的研究越来越多,与主动安全目标物相关的标准相应落地,相应技术也将越来越成熟。
5 结论
本文主要对主动安全目标物的研发现状、基于ISO 19206 标准的主动安全目标物开发关键技术点以及应用分析进行详细的阐述,分析了主动安全目标物的视觉及光学性能要求、雷达散射截面特性测量方法,包括行人目标物、二轮车目标物、乘用车目标物,对主动安全目标物的开发具有一定的指导意义。
随着汽车主动安全技术的进一步发展,开发符合区域特点的主动安全目标物来替代国外成熟产品,逐渐成为了各个研究机构学者所关注的方向。通过对基于ISO 19206 标准的主动安全目标物关键技术及应用的研究,有助于我国汽车行业主动安全技术的改进与完善。
猜你喜欢
印制电路信息(2022年11期)2022-11-30 03:40:58
海洋通报(2022年4期)2022-10-10 07:40:26
光谱学与光谱分析(2022年4期)2022-04-06 03:44:38
意林(2021年5期)2021-04-18 12:21:17
扬子江(2019年1期)2019-03-08 02:52:34
小天使·一年级语数英综合(2017年6期)2017-06-07 23:51:16
电子器件(2017年2期)2017-04-25 08:58:37
汽车电器(2014年5期)2014-02-28 12:14:19
汽车与新动力(2013年6期)2013-03-11 16:08:19
上海理工大学学报(2012年2期)2012-03-20 13:54:30
