基于光场成像PTV的气泡尺寸与速度同步测量方法
2022-10-18 02:45:34鲁非凡赵陆海波唐志永许传龙
东南大学学报(自然科学版) 2022年5期
鲁非凡 李 健 赵陆海波 唐志永 许传龙
(1东南大学能源与环境学院, 南京 210096)(2中国科学院上海高等研究院低碳转化科学与工程重点实验室, 上海 201210)
鼓泡浆态床反应器是一种典型的多相反应器,具有结构简单、传热效果好、相间接触充分等优点,在煤间接液化以及污水处理等工业过程中得到广泛应用[1].在鼓泡浆态床中,气体以气泡的形式存在并参与相间反应,气泡的尺寸和运动速度对床内的反应有重要影响,如气泡的尺寸影响相间接触面积,进而影响反应器内的宏观反应速率[2];气泡的运动速度影响气泡在床内停留的时间,同时反映了床内流体的流动特性,可用于监测是否出现沟流和偏流现象,以避免床内反应效率降低[3].因此实现鼓泡浆态床内气泡参数测量,对指导反应器结构设计、床内的流动状态过程监测和生产过程优化具有重要的意义.
鼓泡浆态床内气泡的测量方式主要有接触式测量和非接触式测量两大类.接触式测量技术包括光导探针和电导探针等.光导探针传感器置入流场,通过探针与气泡接触时反馈的光学信号测量气泡的尺寸和流动速度[4].而电导探针法基于气液2相的电导率差异,根据气泡经过探针时电路中形成脉冲信号测量气泡参数[5].接触式方法较为成熟,但探针的介入会干扰流场,并且由于传感器数量限制,难以实现鼓泡浆态床内气泡全场测量.非接触式测量技术具有不干扰流场的特点,主要有全息成像技术、过程层析成像技术和图像测量技术等[6-8].全息成像技术具有较高的空间分辨率,但是该方法计算效率低,并且极易受实验条件的影响导致重构结果的精度不高;过程层析成像技术基于多相流中各相的电学特性不同,根据流场外传感器接受的电学信号重建流场,但受到传感器数量的限制,气泡重建空间分辨率较低;随着数字图像和计算机技术的发展,图像测量技术也成为目前离散相气泡测量领域研究的热点.传统图像测量技术获取气泡的图像后,通过对图像处理可以得到气泡的尺寸和二维位置信息[9],具有分辨率高、实时性强、系统简单等优点.但单个相机拍摄气泡图像难以获取较为精确的三维信息,使用多个相机拍摄存在成像系统复杂的问题,而且在光学空间受限的场景中,往往无法使用多个相机.
光场成像技术是一种新型的成像方法,与传统相机的内部结构不同,光场相机在主透镜和电荷耦合元件(CCD)图像传感器之间附加了微透镜阵列,微透镜阵列将不同角度的光线折射到不同的像素上,因此光场图像可以同时记录光线的方向、位置和强度信息,使用单个光场相机即可完成对目标的三维测量[10],目前光场成像已应用于火焰三维温度场以及流体三维速度场的测量[11-12].李庆浩[13]应用光场成像技术实现了对气泡的三维位置重建,并结合粒子图像测速(PIV)技术测量了气泡的速度场.PIV技术使用互相关算法计算速度,对比2幅光场图像的重建结果,划定互相关窗口并寻找最大的互相关峰,计算该窗口内气泡的平均速度矢量[14],因此PIV技术在计算速度场时具有平均效应,无法获取每个气泡准确的速度信息.此外PIV技术适用于被测对象浓度高的场合,而鼓泡浆态床内气泡的浓度并不高.相对而言,粒子跟踪测速(PTV)技术[15]基于拉格朗日法,通过跟踪单个气泡在不同时刻的位置,得到每个气泡的速度矢量,避免了PIV方法的平均效应,因此具有直观性和准确性,适用于对鼓泡浆态床内气泡的测量.
本文在光场成像与PTV技术基础上,提出光场成像PTV气泡尺寸以及三维速度的同步测量方法.利用光场相机采集气泡连续2帧光场图像,通过重聚焦处理获取气泡尺寸以及质心三维坐标信息,进而结合粒子跟踪测速技术获取每个气泡的三维速度,从而实现对气泡的尺寸以及三维速度的准确测量.开展了光场PTV系统标定和气泡测量实验研究,并分析了不同气流量下气泡速度与尺寸的变化规律.
1 气泡尺寸及三维速度光场PTV测量原理
1.1 光场成像及重聚焦原理
光场相机是基于光场成像理论设计的一种新型相机,其成像原理示意图如图1所示,主要包括主透镜、微透镜阵列(MLA)和CCD.虚拟像面位于CCD后方,与空间物面关于主透镜共轭.微透镜将来自不同方向的光线折射到不同的像素上,因此二维光场图像可以记录光线的四维光场信息[16],从光场图像出发结合相机内部的参数,可以反向追踪光线的传播路径以及强度,结合数字图像处理技术可获得气泡的尺寸以及三维坐标信息.

图1 光场相机成像原理示意图
光场重聚焦技术是基于原始光场图像和光场相机参数,得到一组聚焦在不同深度平面的重聚焦图像.重聚焦技术的原理如图2所示,一条光线与微透镜平面交点为(u,v),与CCD平面交点为(x,y),与重聚焦平面相交于一点(x′,y′).微透镜平面与CCD平面间的距离为d,与重聚焦平面的距离为d′.提取光场图像中的光场信息,对图像所记录的光线进行反向追迹,并在重聚焦平面上对光线积分得到重聚焦图像[17].
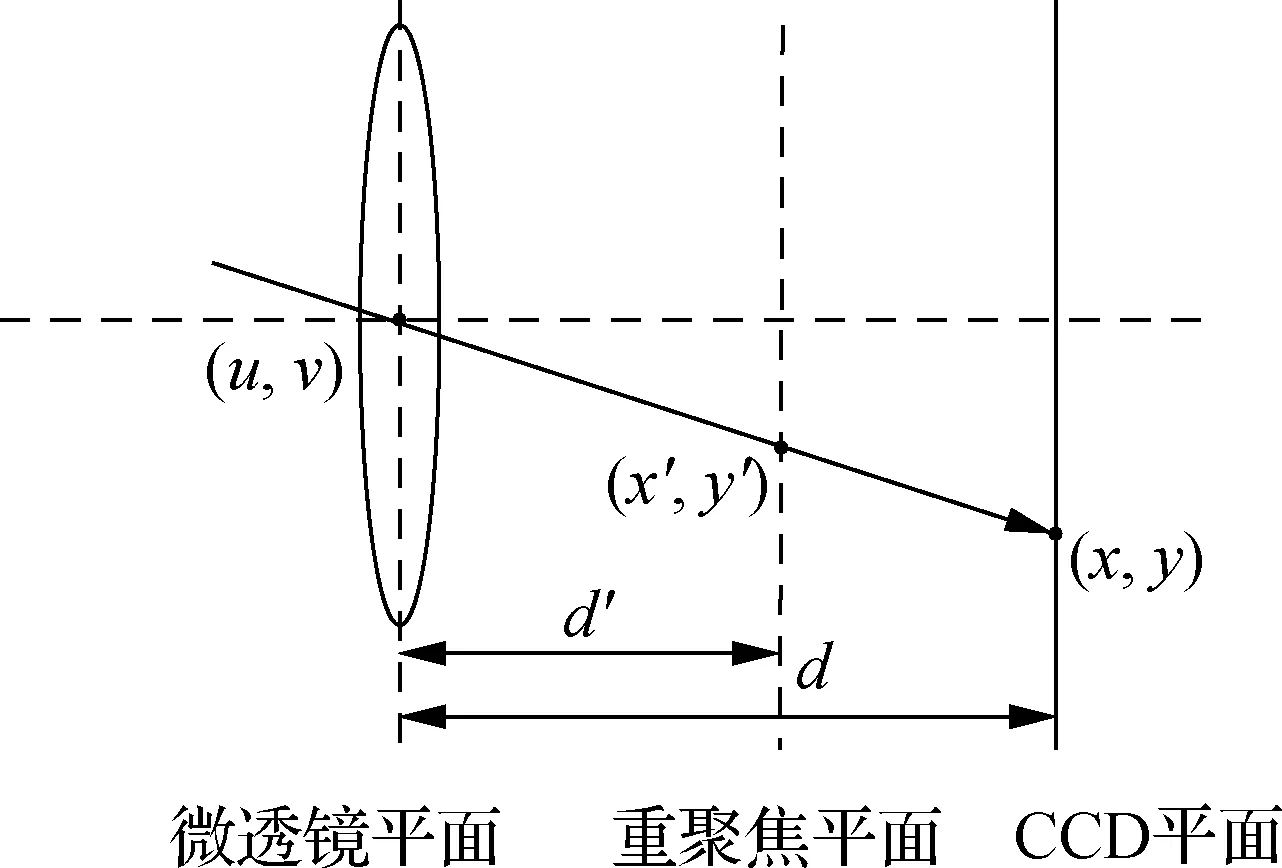
图2 重聚焦原理图
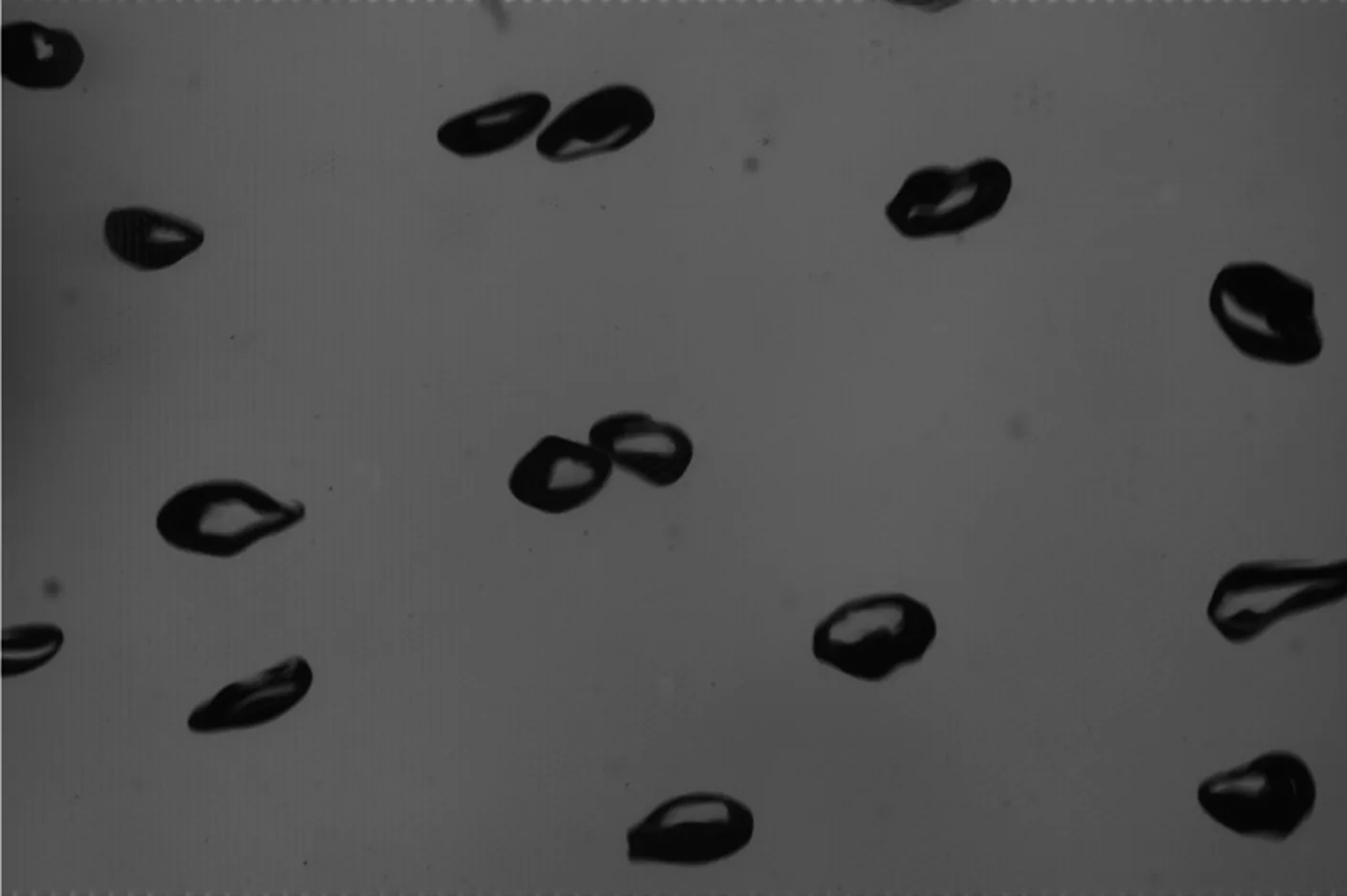
图3(a)为光场相机获取的原始光场图像.应用重聚焦技术可以得到一组重聚焦图像,图3(b)为其中一幅重聚焦图像.重聚焦图像与物空间内的深度平面存在对应关系,表现为位于不同深度位置的物体,在对应的重聚焦平面成像清晰,而在其他重聚焦平面成像模糊,图3(b)中有的气泡相对模糊.采用融合算法将所有重聚焦图像上最清晰的部分进行组合,可以得到全聚焦图像(见图3(c)),在全聚焦图像中每个气泡的投影都清晰.

(a) 原始光场图像

(b) 重聚焦图像
(c) 全聚焦图像
1.2 气泡尺寸和位置测量方法
气泡的全聚焦图像需要进一步处理,获取气泡的尺寸和质心二维位置信息.本文使用Matlab软件开发了光场图像处理算法,图4为气泡图像处理过程.使用最大类间方差法[18]获得二值化阈值,对气泡的全聚焦图像进行二值化处理并将灰度反转得到气泡投影图像(见图4(a)),使用分水岭算法[19]对重叠气泡进行分割,确定气泡的数目以及在图像所占区域(见图4(b)).
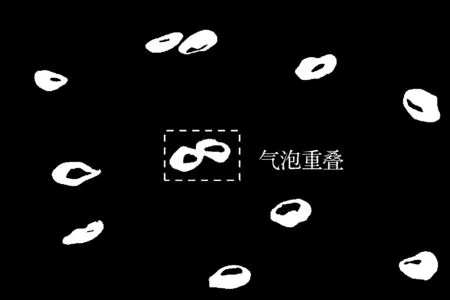
(a) 二值化灰度反转

(b) 重叠气泡分割
基于处理后的全聚焦图像,计算像空间内气泡的尺寸以及气泡质心的二维坐标,气泡的当量直径db计算如下:
式中,Nb为气泡投影区域内像素总数;a为像素边长.
气泡质心二维坐标(x′c,y′c)可由下式计算获得:

式中,xp、yp分别为气泡投影区域内每个像素的横坐标以及纵坐标.
气泡质心的深度位置需要从气泡重聚焦图像中获取,应用点锐度清晰度评价函数[20]计算每幅重聚焦图像中气泡所占区域的清晰度,即
式中,E为图像的清晰度评价值;Ng为图像中的像素总数;k表示进行清晰度评价的像素序号,像素k周围共有8个像素,q为其中进行计算的像素序号; df/dx为像素灰度的变化值除以像素中心距离.
经过计算后得到每幅重聚焦图像中气泡投影的清晰度,确定其中清晰度最高的重聚焦图像序号.根据该序号查找光场相机重聚焦图像标定[21]的结果,可得到此图像对应的气泡质心深度位置以及图像放大率.综合上述信息可以得到气泡质心的三维位置以及气泡二维投影的当量直径.实际上,气泡的形状近似为椭球体,然而本文所述测量方法无法获得气泡深度方向上的尺寸,因此本文使用气泡投影的当量直径作为重建气泡的直径.
1.3 气泡速度测量方法
受限于所用光场相机的帧率,本文难以实现对同一气泡的多帧拍摄,因此拍摄连续2帧的气泡光场图像,经过1.2节中所述处理过程得到2个时刻气泡质心的三维坐标,并进行匹配以确定2个时刻气泡间的对应关系.本文采用的匹配算法为极坐标系统相似(PCSS)算法,该算法基于气泡的位移矢量与其邻域气泡的位移矢量具有相似性,通过比较2帧气泡群分布的相似程度判断是否匹配[22],气泡的相对位置关系通过气泡与邻域气泡质心相对距离r和2个气泡质心连线的角度α进行表述.图5为二维PCSS算法原理图,以气泡中心为圆点,R1为半径划定气泡的邻域范围.计算第1帧气泡i与邻域气泡n的质心相对距离rn和2个气泡质心连线的角度αn,计算第2帧中待匹配气泡j与邻域气泡m的质心相对距离rm和2个气泡质心连线的角度αm.进一步,可计算气泡i与气泡j的相似性系数s,即
式中,N和M分别表示气泡i和气泡j的邻域气泡个数;H为阶跃函数,当且仅当2个值均大于0时输出的结果为1;εr为距离偏差的阈值;εα为连线角度偏差的阈值.对于第2帧中所有气泡都可以计算与气泡i的相似性系数,选取其中系数最大的气泡,即认为与气泡i相匹配.

(a) 第1帧粒子示意图 (b) 第2帧粒子示意图
基于二维PCSS算法,三维PCSS算法需要为连线添加另外2个方向角β和γ作为判断依据,计算第1帧中粒子i与其邻域粒子n的方向角βn和γn,以及第2帧中粒子j与其邻域粒子m的方向角βm和γm,相似性系数计算公式为

式中,H′函数表示当且仅当4个值均大于0时输出结果为1,同时增加εβ与εγ分别作为另外2个方向角的角度偏差阈值,其余计算过程均与二维匹配算法相同.
本文将PCSS匹配算法应用于气泡的匹配中,不同气泡的尺寸差异较大,而实验中2个时刻的时间间隔为毫秒级别,同一气泡的尺寸变化小.基于气泡的上述特点,本文对传统的PCSS算法进行如下改进:在选定第1帧中气泡i后,对比第2帧中所有气泡的尺寸与第1帧中气泡i的尺寸,筛去第2帧中尺寸差距较大的气泡,认为这些气泡不可能与气泡i匹配.经过匹配算法的处理可以得到同一气泡在不同时刻的相对位置,将2个时刻气泡的三维坐标相减,即可得到气泡的位移矢量S,2个时刻的时间间隔t已知,则可以计算出气泡在此时间段内的平均速度矢量V,即
2 光场PTV实验系统
为了验证光场PTV技术测量气泡尺寸和三维速度的可行性,搭建了光场PTV实验系统(见图6),主要包括气泡发生装置、光场相机、同步控制器和面光源.气泡发生装置中,气体经由气泵压缩后通入气路,依次经稳压器、总气体流量计、气体分布器、气体流量计后,通过气孔进入充满水的水槽中形成气泡.稳压器的作用是稳定气流防止波动,总气体流量计用来测量主路的气体流量,气体分布器将气体分流,在所有分出的气路上都配有气体流量计,分别测量支路的气流量,同时流量计上带有气阀可以控制支路的气体流量.所有气体流量计均为转子式流量计.总气体流量计的量程为0.06~0.6 L/min,最大绝对误差为±0.024 L/min.支路上的气体流量计量程为0.01~0.1 L/min,最大绝对误差为±0.004 L/min.水槽的底面为200 mm×200 mm的正方形,水槽的高度为500 mm,气孔均位于水槽底面的一条中轴线上,气孔中心与水槽内壁面的距离为94 mm,水槽边壁的厚度为6 mm.

图6 光场PTV实验系统图
表1为Raytrix的相机参数.实验中采用100 mm定焦镜头,设置光圈为5.6,对焦距离为0.34 m,相机镜头前沿与水槽外壁面的距离为90 mm.在此配置下,气泡尺寸测量的下限为0.02 mm.在实验中光场相机处在PIV模式下,第1帧曝光时间设定为1 ms,相机第2帧的曝光时间固定为200 ms且无法更改.因此实验在暗室条件下进行,采用脉冲信号发生器Stanford DG645同步控制光源以及光场相机.光场相机和光源的时序如图7所示,在一个周期内光源2次脉冲时间均为1 ms,以确保相机的2次曝光接收到的光量相同.气泡速度测量的下限与2帧图像拍摄时间间隔有关,在本文实验中拍摄时间间隔为10 ms,则气泡速度测量的下限为0.002 m/s.

表1 Raytrix R29相机参数
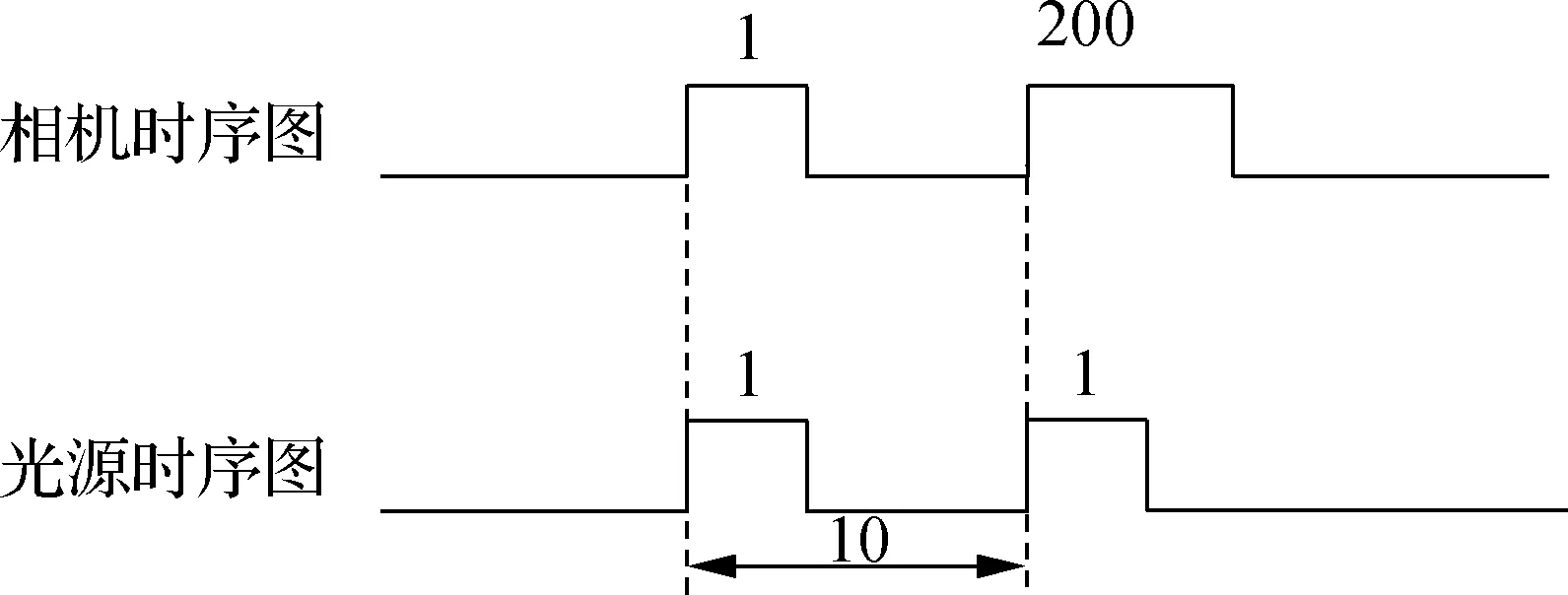
图7 光场PTV时序图(单位:ms)
3 实验及结果分析
3.1 光场相机重聚焦标定
为了确定重聚焦图像对应的物空间深度位置以及放大率,需对光场相机进行标定.图8为标定实验装置示意图.光场相机固定于光学平台上,相机通过信号线与计算机连接,方格标定板固定于精密位移台上并放置于充满水的水槽中,标定实验所用水槽与气泡测量实验所用水槽的材质与厚度相同.标定板与水槽前壁平行,且与光场相机的光轴垂直.
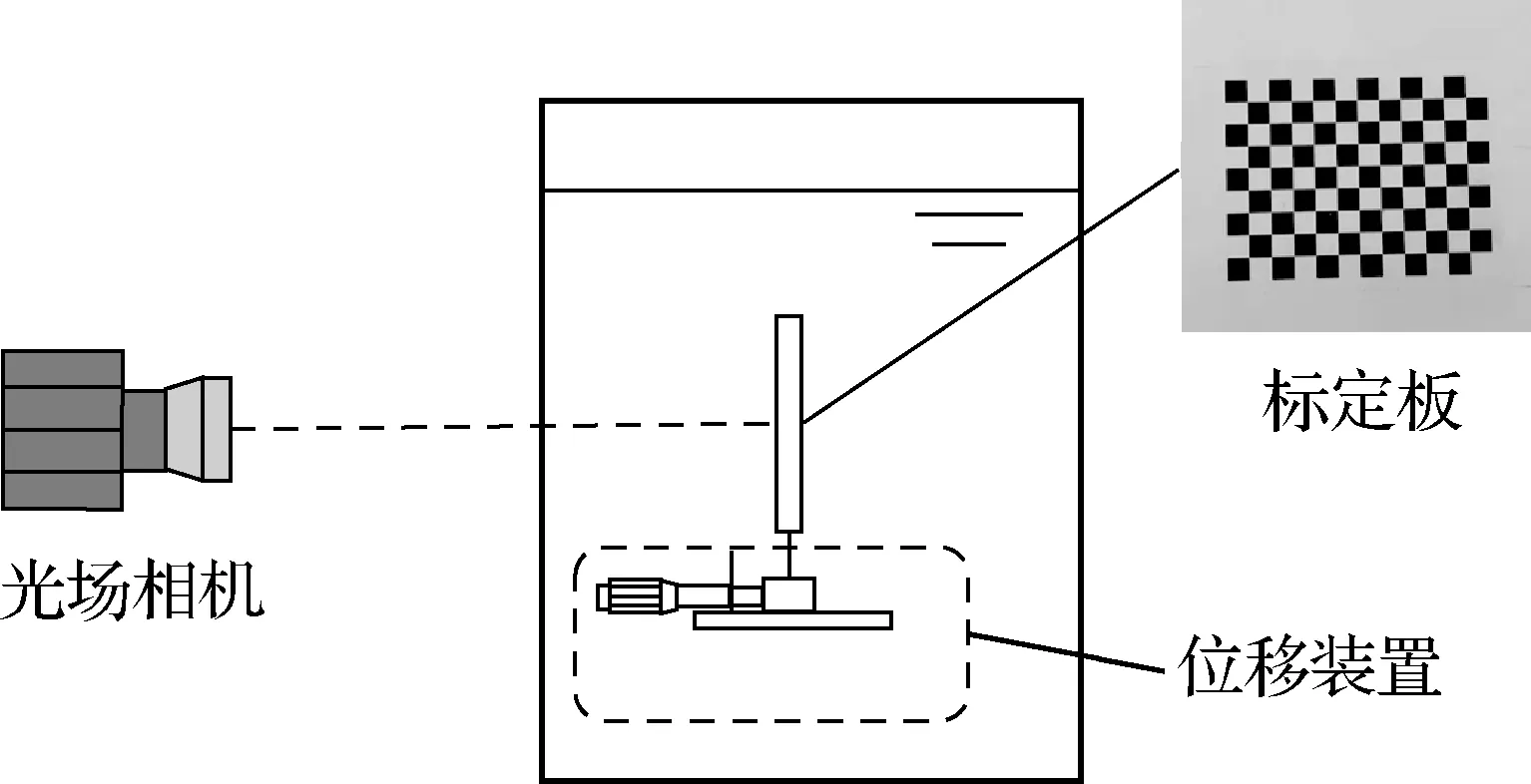
图8 标定实验装置示意图
实验中使用位移台精确调控标定板所处的位置,每隔0.1 mm拍摄一张标定板的光场图像,并记录每张光场图像对应标定板所处的深度位置.分别对每张光场图像进行重聚焦处理,得到共计46张重聚焦图像,使用点锐度清晰度评价函数对每组重聚焦图像进行计算,获得其中最清晰的图像序号,此重聚焦图像与标定板所处的深度位置相对应.使用上述方法处理所有光场图像,得到每个深度位置对应的重聚焦图像序号,同时可以计算物体在不同深度位置处图像的放大率Me,即
(8)
式中,L为标定板上线段的实际长度;Nh为图像中线段所占像素个数.
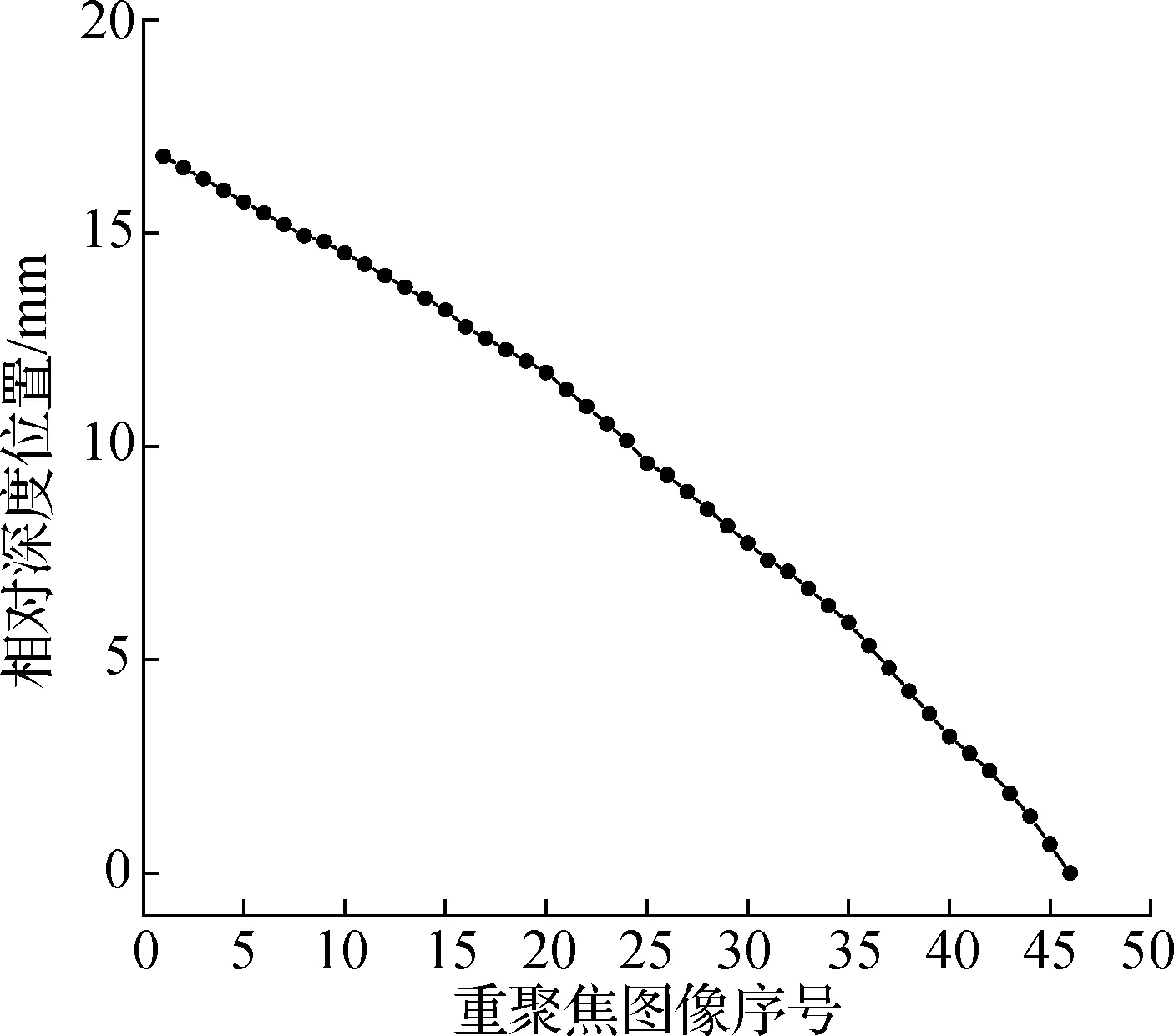
深度标定和重聚焦图像放大率标定结果如图9所示.图中重聚焦图像的深度位置是以序号46的重聚焦图像为基准计算的相对位置,相对深度位置的值越大表示重聚焦图像对应的深度平面离相机越远,相邻2张重聚焦图像对应的深度位置相差在0.3~0.5 mm之间,且图像序号越大差值一般也越大.从图9可以看出,随着重聚焦图像序号的增大,对应物平面的深度位置接近于基准位置,且与相机的距离不断减小,同时重聚焦图像的放大率逐渐增大.
(a) 重聚焦深度

(b) 放大率
3.2 光场PTV测量准确性评价实验
由于气泡处于运动状态,无法准确确定气泡参数的真实值.标定板上圆点的尺寸和位置已知,而圆点的光场成像结果与气泡类似,本文使用圆点标定板对光场PTV技术气泡尺寸以及三维坐标测量准确性进行评价.标定板为25 mm×25 mm的正方形,板上均匀分布64个圆点.其中有5个圆点直径为2 mm,其余圆点的直径均为1.5 mm,相邻圆点中心间距为2.5 mm.实验中,每隔3 mm设为一个拍摄点,记录15张标定板的光场图像,并对圆点的尺寸和中心三维坐标进行分析.
图10(a)为标定板深度位置测量结果.从图中可以看出,标定板深度位置的测量结果与实际值之间偏差较小,在深度位置为1.86 mm时,相对误差最大,为7.14%,同时重复性误差也为最大(10.05%);但随着深度位置的增大,相对误差和重复性误差都逐步减小.这主要是由于深度位置测量基于重聚焦深度标定结果,而深度测量的偏差取决于标定中相邻2个重聚焦平面之间的距离,其值约为0.3~0.5 mm,不同深度处绝对误差较为接近,但深度位置越小,相对误差的绝对值越大.与绝对误差类似,不同深度处的标准差较为接近,均在0.2 mm左右,因此随着深度位置增大,重复性误差也逐渐减小.

(a) 标定板深度位置

(b) 圆点直径
图10(b)为标定板上圆点直径的测量结果.本文仅对直径为1.5 mm的圆点测量结果进行了统计.从图中可以看出,测量结果的平均值均在1.5 mm附近,相对误差最大值为1.60%;不同深度上,测量结果的标准差最大为0.037 mm,重复性误差最大为2.48%,表明光场PTV系统对不同深度的物体尺寸测量具有较高的准确度和精密度.
图11为不同深度下,某一圆点中心坐标的测量结果.从图中可见,不同深度位置上,纵坐标测量结果与真实值最大偏差为0.038 mm,最大相对误差为0.33%,重复性误差最大为2.54%;横坐标测量结果的最大偏差为0.035 mm,相对误差绝对值最大为0.31%,重复性误差最大为1.95%,表明光场PTV系统可以准确地获得不同深度位置上圆点平面位置坐标.

(a) 纵坐标
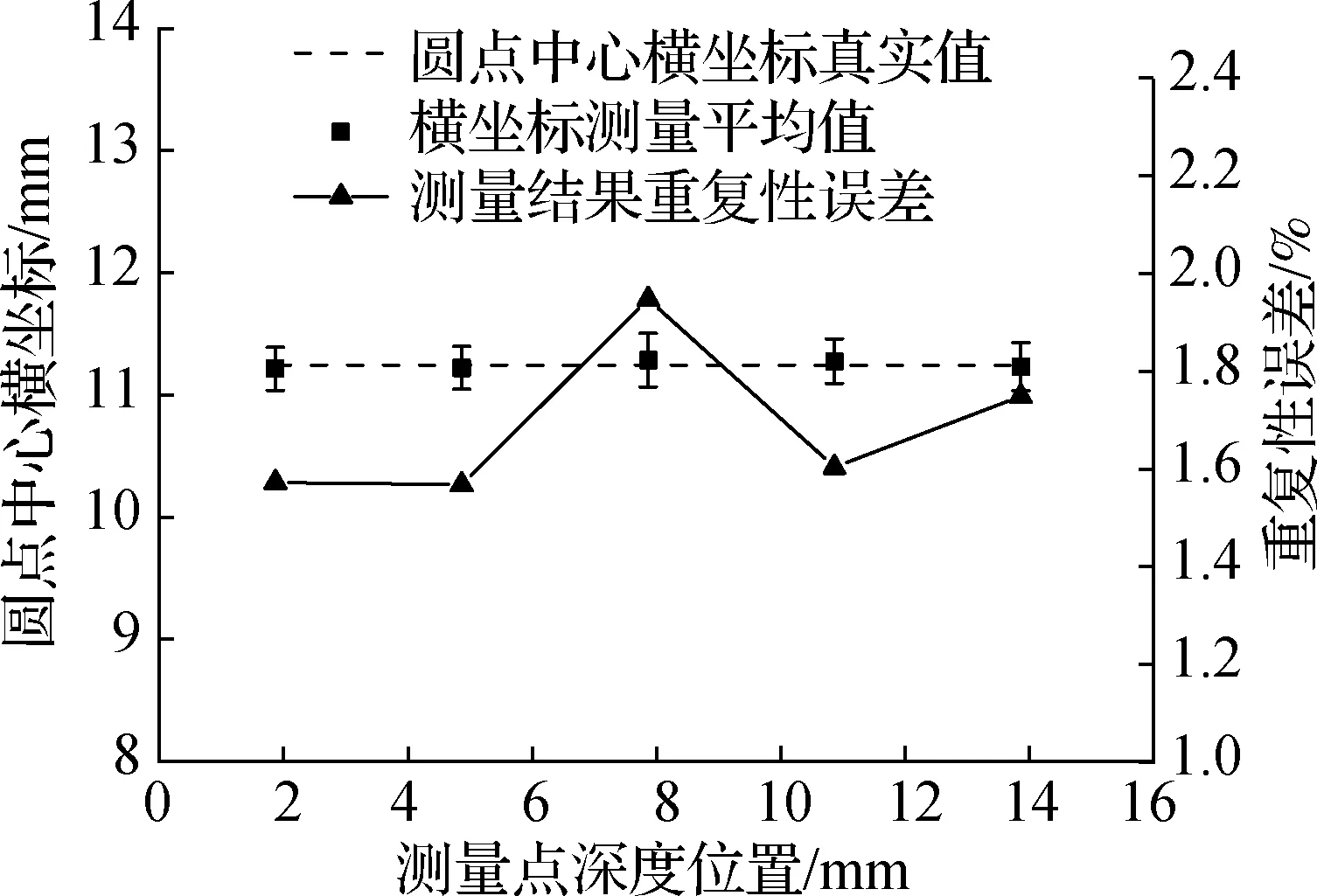
(b) 横坐标
3.3 气泡参数测量结果
图12为气流量0.4 L/min下,2个不同时刻(t1、t2)气泡三维空间分布测量结果.图12(a)是从图3对应的光场图像重建出的结果,气泡数目为12,图12(b)为t2时刻的光场图像重建得到,气泡数目为12,气泡的当量直径在3.5~5.5 mm之间,且不同气泡的尺寸差距较大,气泡深度位置均在-1~16 mm之间.图13为计算所得气泡速度矢量图,图中右上方方框内是速度矢量标尺,3个速度矢量的方向分别为3个坐标轴正方向,大小均为0.1 m/s.从图13可以看出,竖直方向上的速度分量最大,与总速度大小接近,水平方向上的2个速度分量相对较小,均在0.1 m/s以下,且大部分在0.05 m/s左右.根据匹配算法的结果,2个时刻气泡之间一一对应.

(a) 时刻t1

(b) 时刻t2
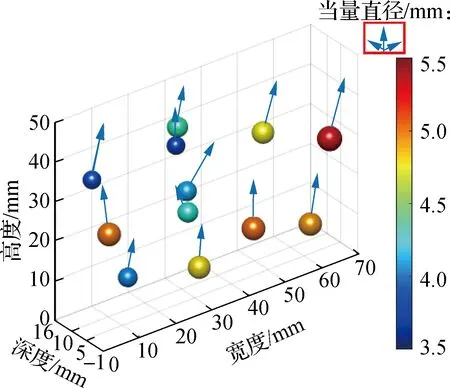
图13 气泡三维速度矢量图
使用总气体流量计进行测量,分别在气流量为0.1、0.2、 0.3 、0.4、0.5 L/min共5种工况下开展了气泡参数测量实验研究.图14为气流量0.1 L/min的工况下,气泡当量直径和速度大小的统计结果.从图14(a)可以看出,气泡的当量直径分布呈现出多峰值的特性,并且整体呈现为两侧低中间高的分布特征.从图14(b)可以看出,气泡的速度分布基本呈现单峰分布特征,大部分气泡速度在0.30~0.40 m/s之间,平均速度约为0.35 m/s.
图15为气泡平均尺寸和平均速度大小随气体流量变化关系.可见,随着气流量的增加,气泡的当量直径平均值从3.85 mm单调递增至4.36 mm,说明气泡的大小与气流量成正相关;气泡的平均速度从0.34 m/s单调递增至0.38 m/s,说明气泡的速度与气流量的大小成正相关.

(a) 气泡当量直径
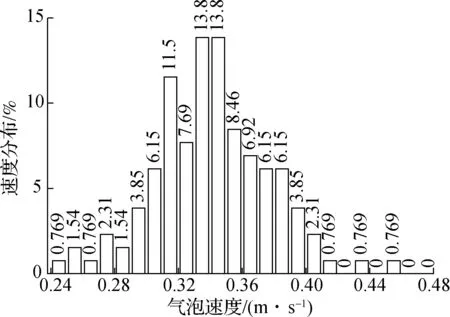
(b) 气泡速度
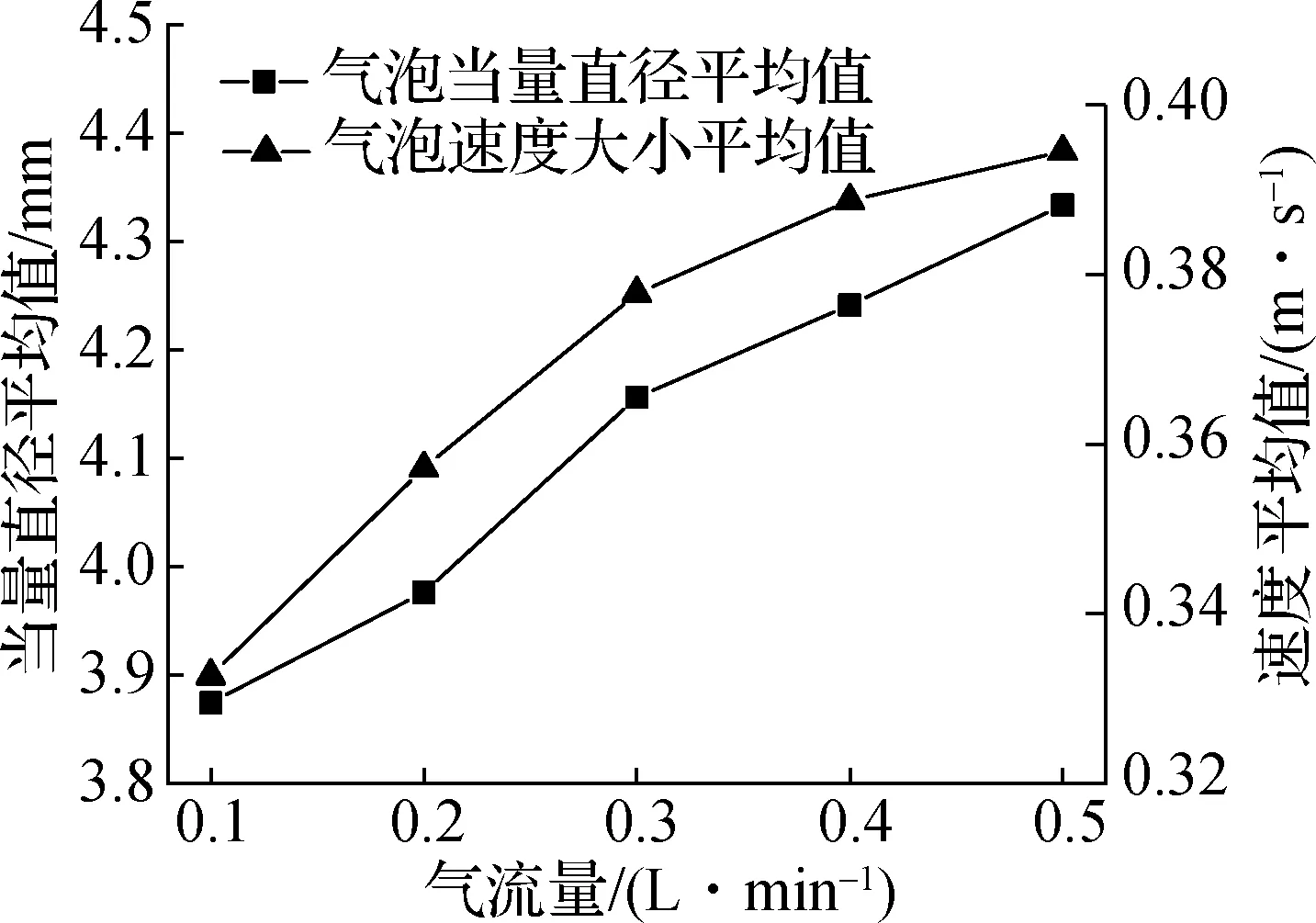
图15 气泡参数随气体流量变化关系
4 结论
1) 本文提出了一种耦合光场成像和PTV技术的气泡尺寸与速度同步测量方法,通过光场相机连续拍摄2张气泡光场图像,结合重聚焦技术实现了气泡尺寸和三维空间位置同步测量.进一步提出了一种改进粒子匹配算法对气泡进行匹配,从而计算得到每个气泡的三维速度矢量.
2) 开展了光场相机标定实验研究,获得了重聚焦图像对应的深度位置以及图像放大率.开展光场PTV测量方法的准确性评价实验.结果表明,气泡直径测量的相对误差小于1.60%,重复性误差小于2.48%,深度位置相对误差小于7.14%.
3) 构建了光场PTV系统,在鼓泡床装置上对光场PTV系统开展了实验研究.结果表明:气流量从0.1 L/min增加到0.5 L/min时,气泡的平均当量直径从3.85 mm增至4.36 mm,气泡平均速度从0.34 m/s增至0.38 m/s.气泡平均尺寸和速度大小随着气流量增加而增大,与气泡产生的规律一致.这些结果验证了光场成像PTV技术的可行性,可实现气泡尺寸和三维速度的同步测量,为气泡三维测量提供了新的方法和测量手段.
猜你喜欢
科学大众·小诺贝尔(低幼)(2024年2期)2024-12-31 00:00:00
欣漾(2024年2期)2024-04-27 15:19:49
新潮电子(2021年7期)2021-08-14 15:53:12
建材发展导向(2021年13期)2021-07-28 07:14:48
科学(2020年5期)2020-01-05 07:03:12
小猕猴智力画刊(2019年10期)2019-11-23 06:40:08
儿童故事画报·发现号趣味百科(2019年9期)2019-02-02 04:12:19
小猕猴智力画刊(2019年12期)2019-01-08 00:50:39
常州工学院学报(2017年3期)2017-09-16 03:48:25
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:10