浅析雷克萨斯车系连续可变气门正时机构控制基理(下)
2022-10-18 08:27:54江苏田锐
汽车维修与保养 2022年7期
◆文/江苏 田锐
(接上期)
③减速机构
减速机构是由启动机齿轮、从动齿轮以及载体构成。相对于凸轮轴旋转轴,载体以偏心圆形状与从动齿轮嵌合。启动机齿轮固定于壳体罩上的齿数、与从动齿轮相比少1个齿。从动齿轮通过载体的偏心运动与启动机齿轮啮合的同时进行旋转,如图20所示。

图20 减速机构内部构造
载体通过凸轮轴控制电机旋转1圈,则从动齿轮在与启动机齿轮啮合的同时、针对旋转轴发生偏心运动,只旋转1个齿的量。从动齿轮的减速旋转,传导至螺旋板以运转连杆机构。减速比为27:1,如图21所示。
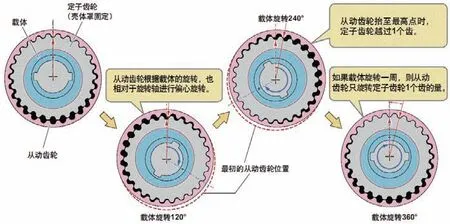
图21 减速机构减速比
④连杆机构
连杆机构由连杆与凸轮板构成,与螺旋板及壳体(凸轮链轮一体)嵌合在一起(图22)。连杆控制销沿着螺旋板的沟槽运转,并运转凸轮板。凸轮板固定于凸轮轴上,根据连杆的运转向提前或者延迟方向运转。凸轮轴控制电机在旋转速度快于凸轮轴时提前点火,慢于凸轮轴时或者逆向旋转时延迟点火。

图22 连杆机构内部构造
a.连杆控制销的运转
连杆控制销由于与螺旋沟槽嵌合,因此沿着沟槽运转。螺旋沟槽其中一端靠近外侧,另一端靠近内侧。因此,螺旋板如果旋转,则连杆控制销就会按照 “外侧→内侧”或者 “内侧→外侧”进行移动,如图23所示。

图23 连杆机构作动原理图
b.凸轮板运转的构造
组合成2个连杆、并转动连杆控制销(绿色)时,与凸轮板连接的蓝色的销将如下图24所示运动。蓝色的销与凸轮板相连。因此,凸轮板(固定在凸轮轴上)运转、提前或延迟蓝色销移动的量,如图25、26所示。

图24 凸轮板作动原理图

图25 连杆、凸轮板协同原理图
电机旋转速度与提前、延迟的关系,如图27所示。

图27 VVT-iE控制电机各工况作动示意

图26 连杆、凸轮板联动原理图
三、控制方法
1.计算目标提前值
发动机ECU根据发动机转速发动机负荷(进气量、进气管压力)得出目标提前值,如图28所示。

图28 VVT-iE控制策略
2.检测实际提前值与控制位移角反馈
根据凸轮位置传感器信号针对曲轴位置传感器信号而产生的变动计算出实际提前值。为了将实际提前值控制为目标提前值,根据反馈控制修正实际位移角的差,如图29所示。

图29 智能配气相位反馈控制
3.VVT保持负荷比学习(液压VVT-i)
VVT-i提前值为目标提前值时,传送至VVT-i控制器的液压被OCV切断,需要保持VVT-i提前状态。发动机ECU,学习以下条件下保持VVT-i提前值所需的OCV驱动负荷比(VVT保持负荷学习值)。VVT保持负荷学习值一般为40%~60%,表1所示为学习控制示例。

表1 VVT保持负荷学习控制
4.控制VVT-i异物排出(液压VVT-i)
发动机机油内的异物,在提供至OCV之前基本上会由燃油控制阀过滤器进行回收,但OCV或VVT-i控制器中可能会咬入异物、导致发生提前角异常。在这种情况下,发动机ECU进行控制,即反复向OCV输出最大提前与最大延迟信号,以便排出异物。将这种控制称为VVT-i异物排出控制。控制VVT-i异物排出时,有时会发生类似离合器强烈振动的车辆前后方向的振动。并且,即使异物被排出且异常现象消除,有时也会有存储P0011[VVT控制(提前异常)],如图30所示。

图30 控制VVT-i异物排出
5.VVT故障时的故障安全
(1)液压VVT-i
在检测出VVT-i异常提前状态时,在怠速旋转时由于气门重叠时间较大导致内部EGR增加从而引起怠速不稳或者熄火的情况发生。为了防止上述异常现象发生,出现故障时将怠速运转速较高设定(设定转速因发动机而异)
(2)电动VVT-iE
VVT-iE系统发生故障时,针对各故障模式,设有诊断代码。检测出异常时,作为故障安全动作,切断向凸轮轴控制电机的供电,同时执行怠速提速。
四、GTS诊断仪关联数据流
ECU数据以及主动测试项目虽然都与根据系统的种类及车型能够确认的项目不同,但是对各自的VVT-i系统均能进行详细的检查。
1.数据流,如图31所示。

图31 VVT数据流
2.主动测试,如图32所示。

图32 VVT主动测试
解析检测时的数据注意点(液压VVT-i),仅限发动机的液压,部分发动机在怠速时,其提前值不能达到可驱动的最大提前值。此时,请尝试通过A/C动作等提高怠速。
五、GTS诊断仪的具体应用
通过VVT-i系统,怠速时进行控制以消除重叠时间。如果VVT-i系统中发生异常、在怠速时变为最大提前状态,则内部EGR将增加,且会导致熄火或者怠速不稳。在发生熄火或者怠速不稳等状况时,请务必确认VVT-i的运转状态。
1.检查液压VVT-i系统运转
通过GTS诊断仪能够确认的项目因车型而异。但是,即使异常现象没有再次出现,也能够根据下述要领详细地掌握VVT-i的运转状态,并能判断与异常之间有无关联性,如图33所示。

图33 VVT运转数据
(1)类型1 检查要领
能够确认VVT目标位移角的车辆,根据发动机的负荷状态,利用VVT-i提前值变大,能够按照以下步骤进行运转检查。检查步骤如下。
①发动机启动后置于完全预热状态。
②只显示上图的3项数据,注意,请选择3项数据进行显示并非全部数据。
③实施D挡熄火,确认VVT位移角对VVT目标位移角进行追踪。请勿完全踩下加速踏板,约1 500r/min即可。由于变矩器的热保护作用,请勿进行5s以上或者连续的熄火检查(请在检查前或检查期间,确认ATF油温)。
④VVT位移角应与VVT目标位移角一致,对于目标追踪的延时时间不能超过限度,如图34所示。

图34 实际相位与目标相位数据比对
⑤VVT-i运转检查NG示例。
示例1:向延迟侧的回位不良,VVT-i控制器没有顺畅地运转。返回最大延迟位置,需要约2.5s,如图35所示。
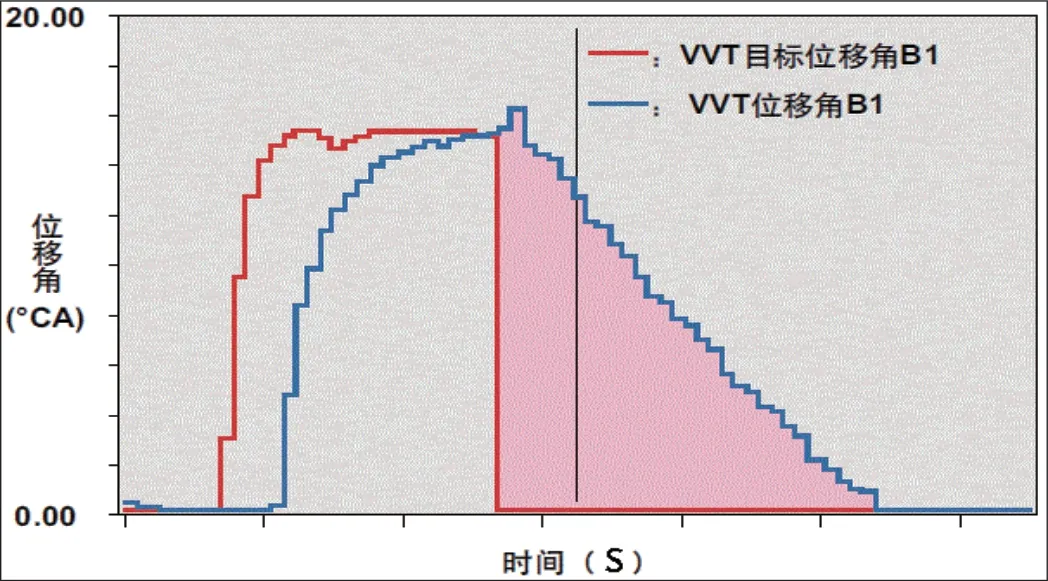
图35 VVT延迟侧回位不良
可能的情况:VVT-i控制器滑动不良;燃油回流孔堵塞;OCV运转不良。
示例2:对目标提前值的追踪延迟,VVT-i控制器没有顺畅地运转。即使达到目标提值前经过约10s也没能提前,如图36所示。可能的情况:VVT-i控制器滑动不良;燃油液压不足;OCV运转不良。

图36 VVT追踪延迟
示例3:提前侧异常提前,实际提前值的提前度超过目标提前值约10°CA,如图37所示。

图37 VVT异常提前
可能的情况:VVT-i控制器运转不良;OCV运转不良;正时链条系统。
(2)类型2 检查要领
能够确认VVT保持负荷比的车辆,虽然作为ECU数据设定了 “VVT位移角”“OCV驱动负荷比”“VVT保持负荷比”3个项目,但除了主动测试时(VVT线性驱动),都不能确认其数值。(主动测试时以外的情况显示为0。)但是如果按照以下要领实施主动测试(VVT线性驱动),并检查VVT提前值,就能检查VVT-i的运转稳定性,如图38所示。检查步骤如下。

图38 VVT线性驱动数据监测
①发动机启动后置于完全预热状态。
②显示ECU数据的3个项目,进行主动测试 "VVT线性驱动"的实施准备。
③对于保持负荷比,逐渐增加OCV驱动负荷比,以确认VVT位移角有无变化。(如果没有变化,则再进行一个阶段的提前驱动。)
④如果发生变化,则在任意的提前位置逐渐地返回OCV驱动负荷比,确认VVT位移角有无开始延迟。
⑤反复进行③、④操作,对提前速度与开始延迟的OCV驱动负荷比是否参差不齐进行确认(在不会熄火的范围内实施检查)。
在主动测试中也存在进行保持负荷比适应控制的情况,会有数据上的保持负荷比发生变化的情况。(实际的保持负荷比与数据上的保持负荷比会出现差异。)在这种情况下,根据OCV驱动负荷比和VVT位移角确认“实际的保持负荷比”,进一步进行检查。
2.检查VVT-iE系统的运转
在搭载VVT-iE系统的车辆中,作为ECU数据设定了“VVT位移角”“电动VVT目标角”2个项目,但除了主动测试时(电动VVT线性驱动),都不能确认其数值。(主动测试时以外的情况显示为0。)但是如果按照以下要领实施主动测试,并检查VVT提前值,就能检查VVT-iE的运转稳定性,如图39所示。检查步骤如下。

图39 VVT-iE运转监测数据
(1)发动机启动后置于完全预热状态。(如果冷却液温度没有上升到80℃以上,则不能实施主动测试。)
(2)选择并显示上述ECU数据,进行主动测试“电动VVT线性驱动”的实施准备。
(3)将发动机转速保持在1 500r/min的同时,改变电动VVT目标角,则可确认VVT位移角追踪目标角变动,并可顺畅驱动。
(4)重复(3)的操作直至最大提前位置,确认提前速度与保持性没有问题。
(5)延迟侧也进行相同的检查。
VVT位移角针对VVT目标角进行持续追踪提前角与延迟角速度是稳定的,当VVT目标角中止于一定值时,VVT位移角将有保持性,提前角与延迟角不能继续,如图40所示。
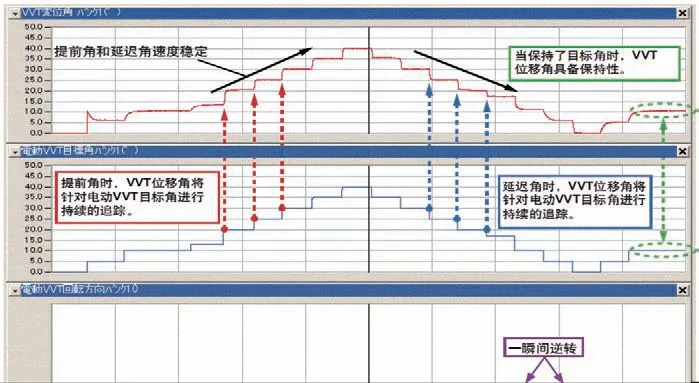
图40 VVT-iE目标与实际相位数据比对
猜你喜欢
小资CHIC!ELEGANCE(2019年28期)2019-09-12 08:12:32
制造技术与机床(2019年8期)2019-09-03 01:15:02
海峡姐妹(2019年1期)2019-03-23 02:42:56
精密制造与自动化(2018年1期)2018-04-12 07:42:50
制造技术与机床(2017年5期)2018-01-19 02:49:06
小猕猴智力画刊(2017年12期)2017-12-27 08:35:00
山西大同大学学报(自然科学版)(2016年2期)2016-12-12 03:19:33
中国机械工程(2015年13期)2015-12-16 12:25:36
河南科技(2014年16期)2014-02-27 14:13:21
汽车与新动力(2014年2期)2014-02-27 12:10:19