新能源汽车制动系统解析(四)
2022-10-18 08:29:26江苏高惠民
汽车维修与保养 2022年7期
◆文/江苏 高惠民
(接2022年第5期)
三、丰田电动汽车ECB系统解析
线控制动的初级阶段的电液制动( E l e c t r o n i c HydraulicBrake,EHB)系统中,最具有代表性之一的是日本爱得克斯公司的电子控制制动(Electronic Controlled Braking,ECB)系统。2001年爱得克斯开始将其ECB系统配备在丰田Estima混合动力汽车(仅在日本销售),2003年至2009年爱德克斯又分别将ECB的升级版ECBⅡ和ECB Ⅲ装载到丰田混合动力车(HEV)Prius2代和3代,以及雷克萨斯混合动力车上,如今ECB又与丰田等品牌的纯电动汽车(EV)配套,成为较成熟的线控电子控制制动系统。下面本文将通过ECB在丰田EV上的应用,全面剖解爱德克斯ECB技术。
1.ECB系统概述
ECB系统组成和安装位置如图28所示,它涉及的控制系统有:防抱死制动系统(ABS)、电子制动力分配(EBD)、制动辅助、牵引力控制(TRC)、车辆稳定性控制(VSC)、主动转向辅助(ACA)、与电动转向助力(EPS)协同控制、二次碰撞制动、上坡起步辅助控制和制动保持。ECB系统架构如框图29所示。

图28 ECB系统组成和安装位置

图29 ECB系统架构框图
(1)电子控制制动系统使用传感器检测制动踏板踩下程度。防滑控制ECU根据此情况计算制动力,带主缸的制动助力器总成、制动助力器泵总成和制动执行器总成控制4个车。
(2)电子控制制动系统与EV系统协同控制以实现对制动液压和再生制动的最佳控制。这样可提高能量再生效率和燃油经济性。液压制动与再生制动协同控制示意如图30所示。

图30 液压制动与再生制动协同控制示意图
(3)系统发生故障时,其使用非故障件继续进行制动控制。同时,电控系统不工作时,通过踩下制动踏板在制动主缸内产生的制动液压作为备用机构进行工作以确保制动力。
(4)ECB系统E/E架构如框图31所示。

图31 ECB系统E/E架构框图
2.系统控制
(1)车辆稳定性控制(VSC)
车辆稳定性控制(VSC)是改善汽车行驶性能的一种控制系统,可大大降低交通事故并提高道路安全。它整合了防抱死制动(ABS)系统和牵引力控制(TRC)系统,有效提高防止汽车转向时滑移、不稳定和侧向驶出车道的综合控制能力。
使用汽车转向盘修正汽车前进方向并沿路线行驶,对于驾驶员来说并非难事。将是否能按驾驶员意图行驶的性质用操纵性这一术语来表示;而所谓稳定性是描述当车辆受到来自路面的力或侧风等干扰时,行驶波动是否较少、能否迅速回到平衡状态的用语。如图32所示,汽车操纵稳定性采用汽车基本运动的模型来研究。

图32 汽车基本运动模型
在图32所示的汽车运动力学模型中,是一个前轮可操纵转向、后轮刚性连接于车身的车辆。设车轮不具有质量并假定视为刚体的车身代表整车的质量;设此车质心为原点,车的前进方向为x轴,侧向为y轴,垂向为z轴,并设想坐标系固定于车上;如果以此坐标系为基准,可将汽车的运动自由度作为空间的刚体运动而分为以下6个种类,如图33所示。

图33 汽车运动自由度示意图
①x方向的平移,前后运动(IongitudinalMotion)。
②y方向的平移,左右运动(IateralMotion)。
③z方向的平移,上下运动(Up and DownMotion)。
④绕x轴旋转运动(Rolling Motion)。
⑤绕y轴旋转运动(Pitching Motion)。
⑥绕z轴旋转运动(Yawing Motion)。
若仔细地观察上述6个运动,又可考虑分为下述两大类:其中①③⑤的运动是与转向盘输入无直接关系的运动,①的运动是由加速踏板和制动引起的驱动与制动产生的前后方向的车辆直线运动;③的运动是由于道路颠簸产生的车辆上下跳动,它直接关系到车辆行驶的舒适性;⑤的运动是伴随道路颠簸引起的车辆俯仰。而②⑥的运动基本上都是由于车辆行驶时转向盘输入而产生的运动,②的运动是由于转向做输入而引起的车辆的侧向运动;⑥的运动是由于转向盘输入而使车辆方向发生变化的横摆运动:还有伴随着②⑥的运动而产生④的侧偏运动。因此,所谓操纵稳定性研究对象的运动基本上可以说是由于转向盘输入而产生的②④⑥运动。
由于汽车行驶的真实工况十分复杂,如路面摩擦系数的变化,汽车的转向、制动,汽车受到侧向风干扰等,都可能引起汽车运动失稳。汽车的转向运动时,由方向盘上施加转角以后使前轮产生侧偏角和侧向力,引起汽车横摆运动;汽车的横摆运动导致后轮也产生侧偏角,进而产生侧向力。前、后轮的侧向力提供了汽车转向的向心力。
汽车在稳定行驶时,例如,高附着路面下转向侧向加速度较小时,轮胎侧偏角较小,与轮胎侧向力近似成线性关系,轮胎特性处于线性区内。在这种情况下汽车的质心侧偏角也是很小的,接近于零,按照预期轨迹行驶。
当汽车发生失稳的情况时,例如进行紧急转弯时,离心力变大,轮胎处于非线性区,侧偏角和轮胎产生的侧向力不再成线性关系,侧向力逐渐饱和,路面又不能提供足够的附着力,导致汽车失去控制,不再按照预期轨迹行驶。当前轴侧向力饱和时,汽车出现不足转向特性,前轴发生侧滑,车辆出现飘移现象,车辆实际的转弯半径比驾驶员预期的要大,汽车偏离预期轨迹;当后轴侧向力饱和时,汽车出现过度转向特性,后轴发生侧滑,产生激转、侧翻、甩尾等危险工况。
VSC系统作为一个闭环控制系统,当车辆在转向、制动或打滑时,通过对制动力和驱动力的控制,针对每个车轮采取制动,精确控制车轮滑移率,就能最好的实现汽车在各种行驶工况下,甚至允许在物理极限范围内,保证汽车在车道内稳定行驶。
图34所示的两种情况下,轮胎会超过其横向附着力限制。车辆处于以下所示任一情况时,VSC通过控制电动机(电动汽车)输出功率和各车轮的制动力来帮助维持车辆稳定性。

图34 汽车车轮打滑的运动轨迹
为判定车辆状况,传感器检测转向角、车速、车辆横摆率和车辆纵、侧向加速度,然后由防滑控制ECU进行计算。
通过目标横摆率和车辆实际横摆率之间的差值判定车辆是否发生转向不足。车辆的实际横摆率小于应当产生的目标横摆率(目标横摆率由车速和转向角判定),表示车辆正在以大于目标行驶轨迹的角度转向。从而,防滑控制ECU判定有较大的转向不足趋势,如图35所示。

图35 汽车转向不足的运动轨迹
车辆是否处于后轮打滑状态通过车辆打滑角度值和车辆打滑角速度(车辆打滑角度随时间的变化)决定。车辆的打滑角度和打滑角速度均比较大时,防滑控制ECU确定车辆后轮打滑的趋势较大,如图36所示。

图36 防滑控制ECU确定车辆后轮打滑的趋势
防滑控制ECU判定车辆转向不足或转向过度时,会减小电动机输出功率并对前轮或后轮施加制动以控制车辆的横摆力矩。VSC功能的基本工作原理如下。然而,控制方法根据车辆特性和驾驶条件的不同而不同。
防滑控制ECU判定有较大的转向不足趋势时,根据趋势的程度采取对策。防滑控制ECU控制电动机输出功率,并对转向时内侧的前轮和后轮施加制动,以帮助抑制转向不足趋势。如图37所示。

图37 抑制转向不足趋势示意图
防滑控制ECU判定有较大的转向过度趋势时,根据趋势的程度采取对策。对转向时外侧的前轮和后轮施加制动,并在车辆上产生向外的惯性力矩以抑制转向过度趋势。除了通过制动力降低车速外,还能确保良好的车辆稳定性,如图38所示。

图38 抑制转向过度趋势示意图
⑵带电动转向(EPS)协同控制
①转向协同控制集成了制动系统和动力转向系统的控制以实现卓越的车辆稳定性和平稳控制。
②在组合摩擦道路上加速或制动时,或者车辆转向不足或转向过度时,转向协同控制根据情况操作各系统并控制转向辅助扭矩以促使驾驶员进行校正转向。系统E/E架构如图39所示。

图39 带电动转向(EPS)协同控制系统E/E架构
③组合摩擦道路上的加速控制(图40),在组合摩擦道路上加速时(如左侧车轮在沥青上,右侧车轮在雪上时),车辆容易向摩擦较小的一侧偏转。除常规TRC系统控制外,转向协同控制控制转向辅助扭矩以促使驾驶员进行校正转向以抵消左右车轮驱动力差所产生的横摆力矩。

图40 组合摩擦道路上的加速控制
④组合摩擦道路上的制动控制(图41),在组合摩擦道路上进行制动时(如左侧车轮在沥青路面上,右侧车轮在积雪路面上时),车辆容易向摩擦较大的一侧偏转。除常规ABS系统控制外,转向协同控制控制转向辅助扭矩以促使驾驶员进行校正转向以抵消左右车轮制动力差所产生的横摆力矩。

图41 组合摩擦道路上的制动控制
⑤车辆转向过度时的控制(图42),为确定车辆是否转向过度,车辆根据转向角和车速对比目标横摆率和实际横摆率的打滑角度。如果判定车辆转向过度,则车辆主要控制外侧车轮的制动力以产生朝向转弯外侧的力矩,从而使过度转向降至最低。此外,转向协同控制控制转向辅助扭矩以促使驾驶员进行校正转向。

图42 车辆转向过度时的控制
⑥车辆转向不足时的控制(图43),为确定车辆是否转向不足,车辆根据转向角和车速对比目标横摆率和实际横摆率。如果判定车辆转向不足,则车辆限制驱动力并控制各车轮的制动力以产生对准车辆及其目标路径的力矩,从而使转向不足降度转动方向盘。

图43 车辆转向不足时的控制
⑶再生制动协同控制
①驾驶员踩下制动踏板时,防滑控制ECU根据制动调节器压力和制动踏板行程计算所需总制动力。
②计算所需总制动力后,防滑控制ECU将再生制动力请求发送至EV控制ECU。EV控制ECU回复实际再生制动量(再生制动控制值)。
③EV控制ECU使用电动机产生负扭矩(减速力),从而执行再生制动。
④防滑控制ECU控制制动执行器电磁阀并产生轮缸压力。产生的压力是从所需总制动力中减去实际再生制动控制值后剩余的值。
⑤制动控制在图44所示的不同车速下将制动力分配至液压制动系统和再生制动系统。

图44 不同车速下液压制动与再生制动的分配
⑥再生制动协同控制E/E架构框如图45所示。
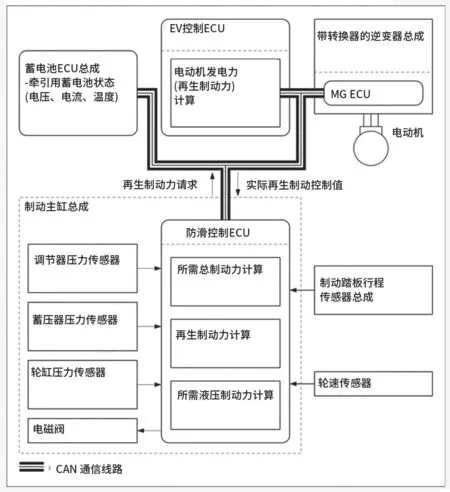
图45 再生制动协同控制E/E架构框图
3.ECB系统零部件功能与构造
ECB系统零部件功能如图46所示。

图46 ECB系统零部件功能说明
(1)轮速传感器
①采用主动式转速传感器。该传感器包含传感器集成电路。
②磁铁型传感器转子由排列成圆形的N、S磁极构成,与轮毂轴承内座圈集成为一体。
③主动式转速传感器使用传感器集成电路检测传感器转子旋转时产生的磁场变化,传感器将检测信息作为数字脉冲(车速信号)输出至防滑控制ECU。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06 03:36:14
北京航空航天大学学报(2021年4期)2021-11-24 01:12:56
小读者(2019年24期)2020-01-19 01:51:36
小学生学习指导·爆笑校园(2019年6期)2019-09-10 04:06:25
汽车观察(2019年2期)2019-03-15 06:00:34
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:30
光学精密工程(2016年3期)2016-11-07 09:03:52
发明与创新·中学生(2016年7期)2016-05-14 04:08:26
通信电源技术(2016年1期)2016-04-16 04:57:35
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45