航天员微重力作业训练系统重力补偿控制策略
2022-10-15 13:24王振汉张立勋陈旭阳
宇航学报 2022年9期
王振汉,张立勋,薛 峰,陈旭阳
(哈尔滨工程大学机电工程学院,哈尔滨 150001)
0 引 言
随着人类科学技术的不断发展,人类对于地外空间的探索范围不断扩大,各航天大国相继推出了登月或登火的路线图。此类载人深空探测任务需要在目标天体地表进行长期的作业任务,相对于地球地表环境,月球或火星与地表作业环境不同。为了让航天员在此类任务中快速适应目标天体作业环境,人们在地球地表环境中使用了多种方法模拟空间重力环境以训练航天员的作业力觉感受。
抛物线飞行模拟微重力方法是通过采用抛物线机动轨迹从抛物线最高点进行俯冲,通常可以维持20~30 s左右的失重状态,NASA利用该技术开展了失重科学实验。ESA利用空客A310 Zero-G飞机在失重环境下进行了一系列实验,俄罗斯也利用类似技术进行航天员的失重训练。但该技术存在训练时间短、训练准备时间长、训练成本较高的问题。
中性水池模拟低重力方法利用液体浮力来平衡重力,营造出模拟的低重力环境。该方法是目前应用最为广泛的微重力训练方法。20世纪60年代NASA马歇尔航天中心就建有中性水槽。中国科学院智能机械研究所也研制了水浮式的微重力模拟系统。由于浸泡在液体中,航天员搬运物体时要克服远大于气体的阻力和紊流。对于深空环境模拟并不完美,同时训练的准备时间长,成本较高。
落塔法模拟微重力是通过在低阻塔内执行自由落体运动产生失重状态。1966年NASA格伦研究中心建造的落塔可以进行太空组件、流体力学、材料加工、生物技术、药品分离的微重力试验。2000年中科院力学研究所建造了微重力落塔,可进行流体物理、非金属材料燃烧、液体管理等微重力实验研究。该方法的优点是模拟精度高,但是存在造价昂贵、单次模拟时间过短的问题。
柔索悬吊模拟微重力方法主要原理是利用柔索竖直方向的拉力来平衡人和物自身的重力,柔索悬吊模拟微重力方法的优点是结构相对简单,实验时间较长,可以进行空间多自由度模拟微重力环境,因此目前被广泛使用。但其存在着支撑柔索驱动单元的桁架占地面积较大、绳索随动装置存在运动摩擦影响实验精度、柔索随动时存在滞后运动及柔性抖动等问题。
基于力反馈的航天员微重力模拟作业训练机器人系统可以模拟大质量物体在空间的运动特性,实现微重力下的触觉及力感模拟。但是现有的力反馈微重力模拟训练机器人存在提升力受到多余力的影响较大、系统的相对稳定性较差、力控精度很难保证等问题。
重力补偿控制是指利用重力补偿系统对竖直方向的重力场进行补偿,使作业对象在重力方向实现目标空间的运动状态。文献[16]提出一种粗精结合、开环闭环结合的重力补偿系统方案,实现了大范围的星球车重力补偿系统。文献[17]设计了一种基于位置最优滑模内环控制策略的恒张力悬架零重力跟踪系统,实现了空间天线在地面环境下的零重力模拟。文献[18]设计了一种基于模糊PID的力/位混合控制方法的主动悬吊式重力补偿系统,实现了空间机械臂地面竖直方向的重力补偿。但现有的重力补偿控制技术主要针对重力方向上低速、低加速度的环境设计。对于虚拟空间环境作业训练而言,重力补偿系统需要进行人机交互作业,大部分时间处于大动态、大外力扰动的工作环境。现有的重力补偿技术已经无法满足航天员虚拟环境作业训练。
为克服以上方法的不足,本文研制了用于航天员模拟空间重力环境搬运物体训练的重力补偿作业训练系统;同时提出一种基于干扰力补偿的提升力复合控制策略保证力控精度及稳定性,并通过实验验证了该控制策略的有效性。相比于前述方法,本文方法具有占地空间小、建造成本低、能够短时间进行多次训练、在地面实现任意低重力空间环境重力效果模拟的作业训练的优势。
1 重力补偿作业训练系统原理
为了提高实际空间环境作业的水平和作业安全性,在地面环境实现“虚拟空间重力环境”中的物体移动作业训练需求,使航天员获得在空间环境移动物体作业的感受和作业技能,需要真实地模拟地外空间环境物体在航天员操作力作用下的运动状态。通过一定的控制技术,在重力方向上补偿作业对象的“地表重力”与“空间重力”之间的差异,使得被训练人员感受到的是地外空间环境的重力和作业对象的惯性力;在水平方向上感受到的是作业对象的惯性力,从而让受训练者感受到的是与空间重力环境相同或者相近的反作用力,以及作业对象在空间中应有的运动状态。由此提出了一种训练系统,原理如图1所示。图2为重力补偿训练系统的控制原理图。

图1 航天员微重力作业训练系统原理图Fig.1 Schematic diagram of the microgravity training system for astronauts
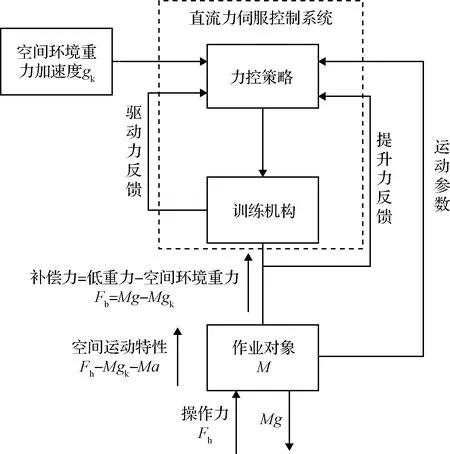
图2 作业训练系统重力补偿控制原理Fig.2 Control schematic of gravity compensation in the microgravity training system
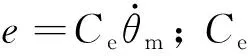
为保证力控精度,消除回程误差的影响,采用力矩电机控制的高精度滚珠丝杠螺母提升机构实现提升力的控制,机构原理如图3所示。其中为提升力,为电机驱动力矩,为操作人员对作业对象施加的垂向操作力,为作业对象的质量,为承重杆的刚度系数。

图3 重力补偿作业训练系统机构原理图Fig.3 Mechanism diagram of gravity compensation in the microgravity training system
在空间重力环境,物体在重力方向操作力的作用下,理想运动规律为:

(1)
式中:为在空间环境下作业对象的理想运动速度;为空间环境的重力加速度。
对于重力补偿作业训练系统,为保证模拟空间环境重力的准确性,提升力应为:
=(-)
(2)
式中:是重力补偿作业训练系统的期望提升力。
在作业过程中,需要通过对提升力的控制补偿“地面”与“空间”的重力加速度差异,以及物体运动带来的附加多余力,保留空间环境的重力和惯性力,获得物体在空间的运动状态,即实现式(1)的运动规律。
2 基于电流反馈力控制及重力补偿控制策略
2.1 伺服驱动系统对象数学模型
力伺服机构动力学模型
如图3所示,电机的力矩平衡方程为:

(3)
承重杆力平衡方程:

(4)
考虑承重杆的刚度,有:
=(-)
(5)
式中:为电机等效转动惯量;为电机等效黏滞摩擦系数;为电动机的转角;为提升杆系的黏滞阻尼;为末端作业对象位移;为滑台位移;为丝杠导程。
将式(3)~(5)联立并进行拉普拉斯变换得到的机构模型为:

(6)
其中:


(7)

(8)

(9)

力伺服机构控制模型
直流力矩伺服电动机电枢回路方程为:

(10)
电机输出力矩方程:
=
(11)
将式(10)(11)进行拉氏变换,代入式(6)可以得到被控对象提升力()作为系统输出的数学模型:
()=()()+()[()+]
(12)
式中:()是从输入电压到提升力的模型,称为前向通道传递函数;()是末端作业对象受到的手操力及自身重力的合力影响产生的部分输出力的模型,是多余力或扰动通道,称之为多余力传递函数。
最后,值班律师提出的各种辩护意见一定要立足于案件的实际情况,各种量刑情节要有事实和证据方面的依据。由于认罪认罚案件中值班律师的主要作用是在审查起诉阶段,值班律师说服的对象是检察官,因此值班律师在同检察官进行“控辩协商”时,应引用最高人民检察院指导性案例中对相关犯罪的量刑处理意见去论证自己的观点,争取最大限度地说服检察官接受本方的辩护意见,进而实现真正的有效辩护。
由式(12)可知,通过对电机电枢电压的控制,使得提升力等于式(2)所示期望提升力,是重力补偿作业训练系统力伺服的控制目标。
2.2 基于电流反馈的提升力主动控制
由于作业对象的主动运动会产生很大的多余力,直接测量承重杆上的拉力作为力反馈控制时,提升力系统为被动式力伺服控制系统,提升力受到多余力的影响较大,系统的相对稳定性较差,力控精度很难保证。考虑到以上因素,本文采用主动力控制实现提升力的控制。
对于图3所示的提升力控制系统,当忽略提升机构的弹性形变时,电机的输出力矩与提升力成比例关系,因此可以通过对电机驱动力矩闭环实现对提升力的主动控制。这样做的优点是可以避免将多余力排除在力闭环之外,可以避免其带来的不利影响;缺点是,没有对提升力进行直接反馈控制,力控精度会受到影响,对此,本文采用复合力控制策略加以改善。
考虑到电机输出力矩的测量比较困难,而直流力矩电机的电流与输出力矩成比例关系的特点,可以通过电流反馈实现电机的输出力矩的主动控制。电流反馈的力控制模型如图4所示,()为期望提升力。提升力控制系统为0型系统,控制器()采用PI控制器,将系统提高到I型,提高力控制精度,改善系统的性能。

图4 基于电流环的提升力控制方框图Fig.4 Block diagram of lifting force control based on current loop
2.3 基于干扰力补偿的提升力复合控制策略
采用电流反馈实现重力补偿控制,其优点是易实现、成本低,系统的鲁棒性好;但由于系统运动时会受到摩擦及惯性力等扰动力的影响,力控精度不高。因此,需要对这些干扰力进行补偿控制,使系统具有良好的控制精度及抗干扰能力。干扰力补偿控制策略如图5所示。

图5 干扰力补偿控制策略Fig.5 Interference force compensation control strategy
重力补偿模块用以补偿地面与目标环境存在的重力差。使作业对象的受力等效于目标环境的重力与自身的惯性力。
摩擦力补偿模块及干扰惯性力补偿模块用于补偿机构运动时产生的摩擦力和丝杠、电机主轴等机构本身加减速产生的干扰惯性力。
摩擦力补偿
基于“静摩擦+库伦摩擦+黏滞摩擦”的经典摩擦模型,对系统综合摩擦力进行动态补偿,以消除摩擦力对作业系统的影响。
摩擦模型可表示为:
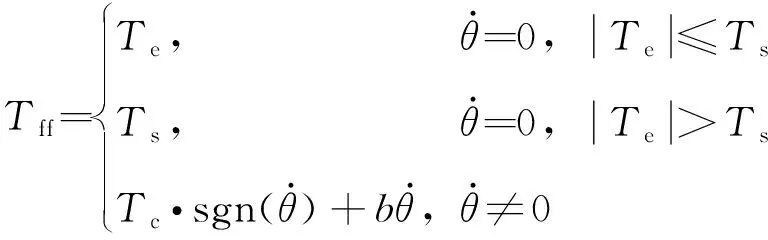
(13)
式中:为综合摩擦力矩;为外力矩;为库伦摩擦力矩;为黏滞摩擦系数。
由于静摩擦力难以进行补偿,因此当补偿系统静止时,可以对其施加一个微小的正弦驱动力矩=sin()形成动润滑,以提高系统动/静启动时的系统性能,同时根据式(10)的摩擦模型,可以得出式(11)所示系统的摩擦力补偿策略。
(14)
式中:及在实验中确定。计算得到摩擦力补偿力矩实时叠加到系统驱动力矩中,对系统摩擦力进行补偿。
惯性力扰动补偿
传动机构的惯量可以折算为负载惯量,惯性干扰力主要来自电机转子惯量,补偿力矩可表示为:
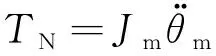
(15)

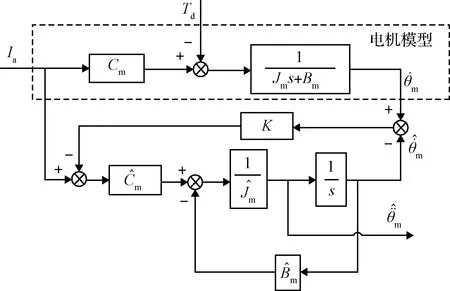
图6 角加速度观测器Fig.6 Angular acceleration observer

3 重力补偿作业系统实验研究
3.1 电流反馈的提升力控制实验
图7为重力补偿作业系统实验样机图片,机构各物理量参数如表1所示,采用图4控制模型,选取电流环PI控制器参数=1,=300。分别对18.5 kg和38.5 kg两种质量的作业对象负载进行“零重力”环境人机交互实验,即=0,实验曲线如图8~9所示。
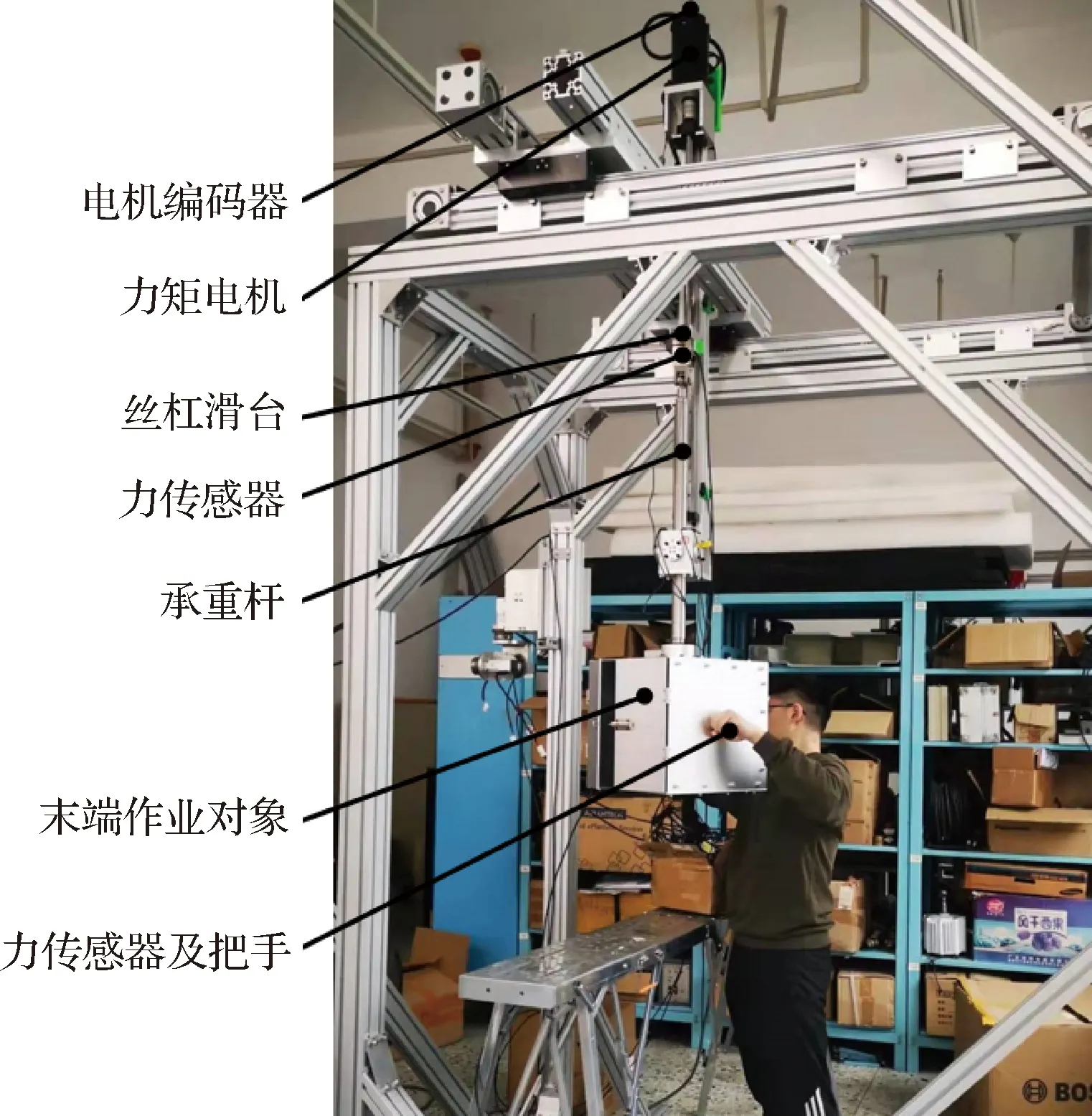
图7 重力补偿作业系统实物图Fig.7 Image of the gravity compensation operating system
表1 系统各物理量参数Table 1 Physical parameters of the system
图8(a)及图9(a)分别是两种负载下的操作力实验曲线。其过程为:操作者对作业对象施加手操力时物体产生运动,达到一定速度后,操作者脱离物体,物体自由运动,物体期望的运动规律如图8(b)及图9(b)中的虚线所示(由式(1)确定),即等效于物体在“零重力”环境下受到操作力时的运动规律。图8(b)及图9(b)中的实线为物体的实际运动规律,可见物体的实际运动与期望运动的偏差较大,效果很不理想,其原因是提升力的控制不够精准,观察图8(c)及图9(c)实线所示的提升力曲线发现,在加速段(起始阶段),提升力误差很大;在平稳阶段虽然误差不大,但是实际提升力一直低于期望提升力,导致物体的运动速度一直减小,与期望值偏差越来越大。

图8 18.5 kg实验曲线Fig.8 Curves under the load of 18.5 kg
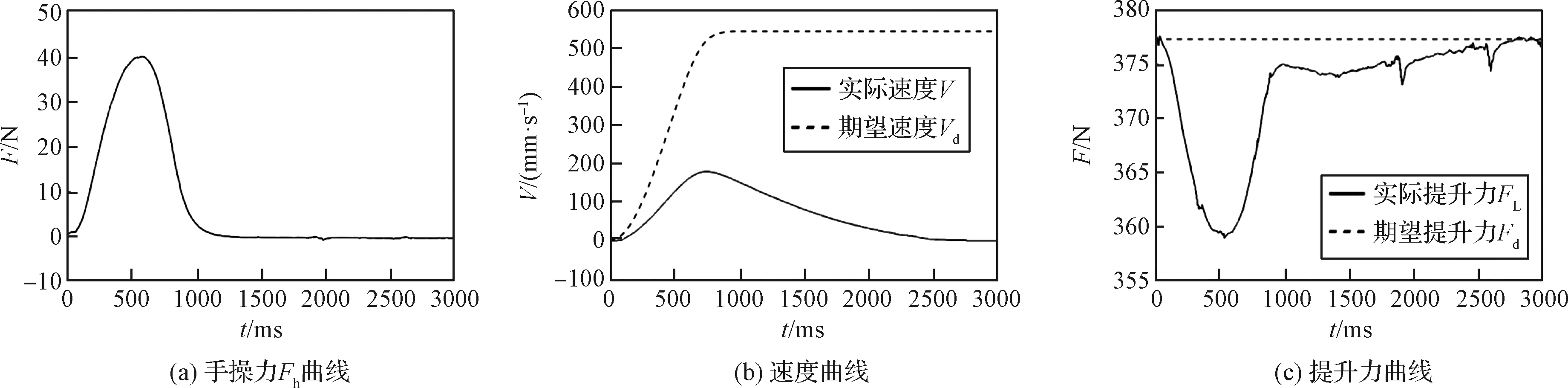
图9 38.5 kg实验曲线Fig.9 Curves under the load of 38.5 kg
究其原因,由于是通过对电机输出力矩主动控制实现的提升力控制,无法补偿传动机构的摩擦、电机转子轴系惯性力、弹性力等干扰而产生的影响。
3.2 干扰力补偿提升力复合控制实验
对应于图6所示的改进后的复合控制模型,在其他条件不变的情况下,得到补偿后的提升力控制实验曲线如图10~11所示。
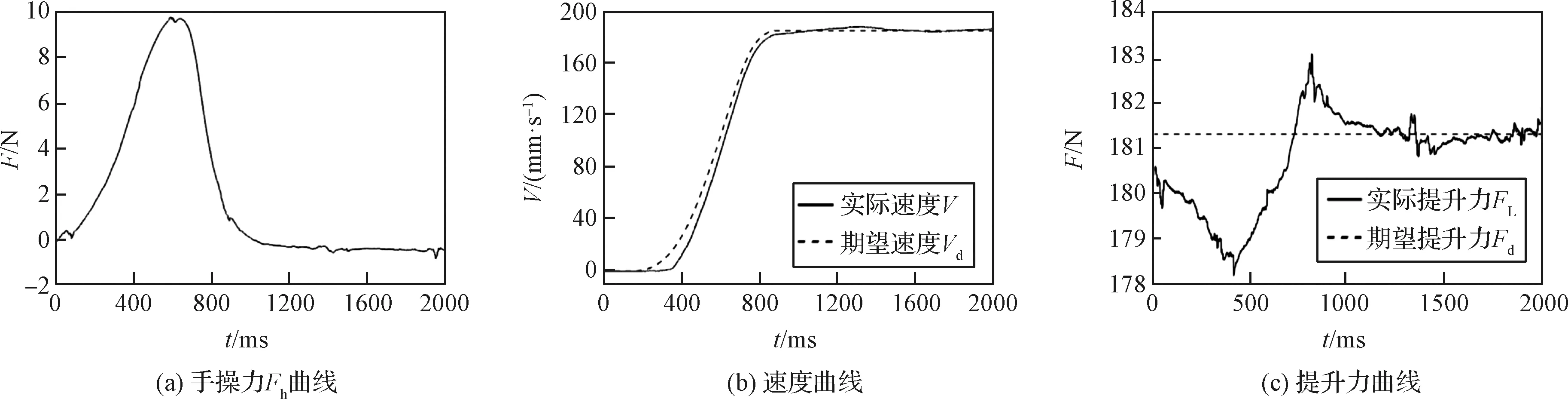
图10 18.5 kg复合控制实验曲线Fig.10 Composite control curves under the load of 18.5 kg
由图10(b)及图11(b)可以得出,采用干扰力补偿复合控制后,在操作力作用下物体的实际运动速度与期望运动速度的偏差很小,平稳段的最大偏差为2.1%;在加速段,实际速度较期望速度略有滞后;整个过程中的物体运动平稳,鲁棒性较好。从图8(c)及图9(c)的提升力曲线可以看出,在加入干扰力补偿前,提升力受到物体运动影响较大,最大提升力误差较大;从图10(c)及图11(c)的提升力曲线可以看出,加入补偿后,减小了物体运动速度对提升力的影响。当存在操作力扰动时,18.5 kg实验中,提升力最大偏差为3.1 N,力加载精度在98.4%以上;38.5 kg实验中,提升力最大偏差为7.1 N,力加载精度在98.2%以上;在无操作力作用时,18.5 kg实验中,力加载精度在99.8%以上,38.5 kg实验中,力加载精度在99.7%以上。
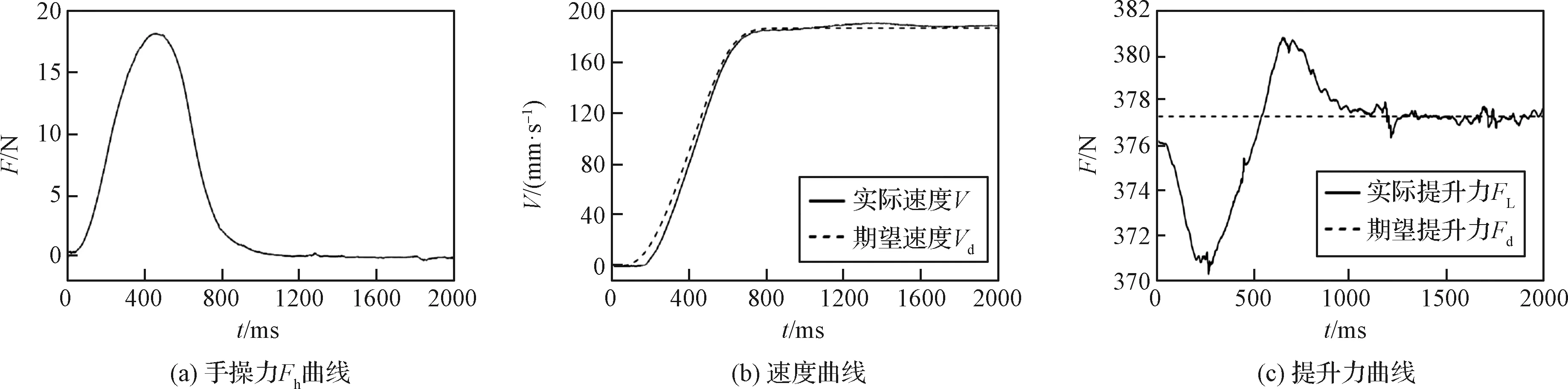
图11 38.5 kg复合控制实验曲线Fig.11 Composite control curves under the load of 38.5 kg
与相关研究成果相比,当作业对象在力加载方向运动为低速、低加速度环境下,文献[15]拉力加载误差小于0.5%,文献[16]拉力加载误差小于0.4%,本文在该环境下的最大力加载误差小于0.3%;当作业对象在力加载方向存在大动态、大外力扰动的情况时,文献[14]拉力加载误差小于3%,本文力加载误差小于1.8%。
分析结果表明,采用复合力控策略后系统后,系统对多余力具有很好的抑制效果,无论在小动态还是大动态扰动下均有较高的力加载精度,不同模拟负载下,系统的性能变化不大,对负载大小变化有较好的适应性。
4 结 论
本文针对航天员地面模拟空间环境物体搬运作业训练需求,提出一种用于航天员微重力作业训练系统,通过对作业对象提升力的控制,补偿地面重力与空间环境重力的差异方法,保留空间重力特征和物体的惯性特征,实现了在地面环境模拟物体在空间环境,物体在外力作用下的运动规律,为航天员地面模拟训练提供了一种有效方法,可以实现搬运物体中的各种运动状态模拟。相比于现有抛物线飞行法、水浮法及落塔法,本系统具有占地空间小、建造成本低等优势。
提出了一种基于电流反馈的主动提升力控制与干扰力补偿控制的复合控制策略,相比现有重力补偿系统,该方法可以适用于重力方向上大动态、大外力扰动的模拟环境。在大动态环境下实现了对物体提升力的控制,有效地避免了因物体主动运动而产生的多余力对系统稳定性和力控制精度的影响。
通过对不同质量物体的提升实验验证了重力补偿提升系统的可行性和提升力的控制性能,以及通过提升力的控制实现物体在地面环境与空间环境重力差异补偿。实验结果表明,无论在小动态还是大动态扰动下均有较高的力加载精度,较好地复现了空间重力环境物体的运动特性。
该系统可以有效实现对不同质量物体在空间重力环境中的运动状态模拟,用于辅助航天员在地面环境中开展虚拟搬运训练,适用于对包括零重力空间在内的各种微重力环境的运动模拟,为辅助航天员在地面环境下开展虚拟微重力环境搬运训练提供一种低成本且有效的方法。
猜你喜欢
新视线·建筑与电力(2021年4期)2021-11-01
新视线·建筑与电力(2021年2期)2021-09-10
科普童话·神秘大侦探(2020年3期)2020-05-11
科学家(2016年10期)2017-09-27
新高考·高一物理(2016年10期)2017-07-07
山东青年(2016年12期)2017-03-02
小天使·一年级语数英综合(2016年9期)2016-05-14
山东工业技术(2016年7期)2016-04-08
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
中学生数理化·八年级物理人教版(2014年2期)2014-04-02