
基于LSTM特征提取的电梯液压缓冲器隐患识别方法
2022-10-14 05:52姚懋欣刘桂雄梁敏健
中国测试 2022年9期
姚懋欣, 刘桂雄, 梁敏健
(1. 华南理工大学机械与汽车工程学院,广东 广州 510640; 2. 广东省特种设备检测研究院珠海检测院,广东 珠海 519002)
0 引 言
电梯液压缓冲器是提供最后一种安全保护的电梯安全装置,目前电梯液压缓冲器现场检测方法主要是人工观察检验,其效率低、准确度低,还存在人身危险。为分析电梯液压缓冲器缓冲性能及失效模式,文献[1]对液压缓冲器常见缺陷进行分析,提出日常维护检修相关建议;文献[2]根据液压缓冲器结构特性和动态机制,建立压力、速度之间非线性关系数学模型来表示缓冲过程;文献[3] 应用质量守恒、能量守恒方程建立缓冲器液压阻力数学模型,采用数值分析方法对不同工况下缓冲特性进行分析;文献[4]对电梯用聚氨酯缓冲器进行不同时间加速老化试验,分析不同老化时间后样品力学性能、质量变化。对于电梯液压缓冲器检测,主要是限于压缩复位性能[5-10],文献[5] 提出利用超声波定位、信号触发实现缓冲器复位过程动态监测与结果自动检验;文献[6]研究一种电梯液压缓冲器测试仪传感器电路,通过微处理器判断缓冲器复位时间;文献[7]计在用电梯液压缓冲器动态测试仪,通过无线数据传输及嵌入式系统数据采集处理,实时输出液压缓冲器动作曲线[7];文献[8]研究电梯液压缓冲器复位时间校准方法,对复位时间测量结果进行不确定度评定;文献[9]研究一种基于智能图像识别的电梯液压缓冲器检测系统,检测复位时间与复位距离。但这些研究均没有建立性能与缓冲器隐患(油量不足、弹簧锈蚀、柱塞锈蚀、安装倾斜等)之间关系,难以实现电梯液压缓冲器隐患识别与预测。
本 文 提 出 基 于 长 短 时 记 忆(long short term memory, LSTM) 网络特征提取的电梯液压缓冲器隐患识别方法[10],该方法引入深度学习LSTM网络以识别压缩复位关键点、进行特征提取,并基于决策树算法实现缓冲器隐患模式识别。
1 电梯液压缓冲器隐患识别方法总体框架
对电梯液压缓冲器完整压缩、复位过程采用激光测距传感器及计算机获得位移、时间信息,对这些信息进一步分析,可得到缓冲器隐患信息。缓冲器实时位移、时间信息数据量较大,前期研究表明循环神经网络 (recurrent neural network, RNN)对较长时间尺度的数据处理能力较差[11],支持向量机(support vector machine, SVM)等分类算法在多分类问题上区分电梯液压缓冲器多种运动状态效果有限[12]。若使用LSTM网络对缓冲器数据进行数据处理、特征提取,其结构内记忆通道可实现对早期网络状态传递,有望较好解决长时间、距离的依赖问题。
图1为基于LSTM电梯液压缓冲器隐患识别方法总体框架图,主要包括:①LSTM关键点识别技术;②缓冲器压缩复位特征提取与模式识别技术。
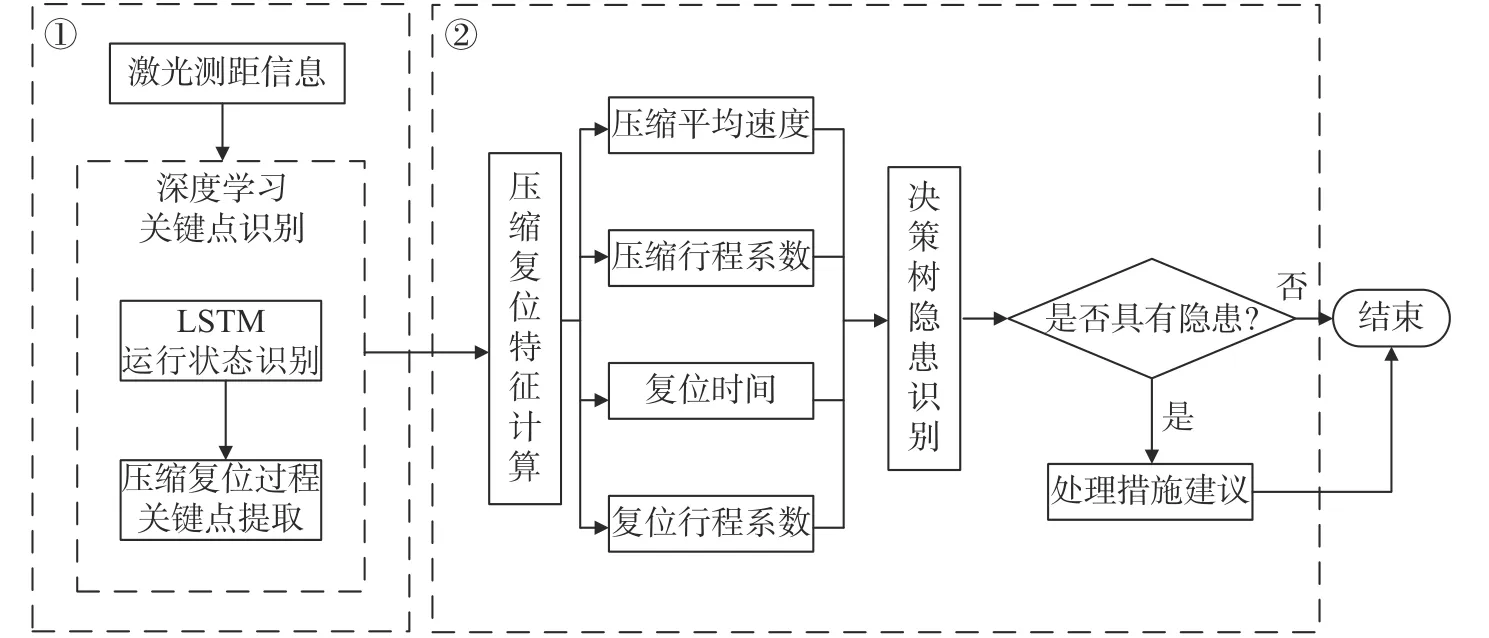
图1 基于LSTM电梯液压缓冲器隐患识别方法总体框架
缓冲器隐患识别详细步骤包括:1)在电梯液压缓冲器上安装检测系统,对缓冲器进行一次完整压缩复位过程,使用激光测距传感器采集缓冲器位移信息。使用LSTM运动状态识别网络对电梯液压缓冲器位移信息进行运动状态识别,输入层为激光测距传感器所采集缓冲器位移信息,输出缓冲器运动状态(含开始、压缩、保持、复位、结束),并进行关键点识别,提取关键点位移、时间信息。2)使用特征提取公式,计算压缩复位过程特征信息,特征信息输入决策树隐患识别网络,进行缓冲器隐患识别。
2 基于LSTM特征提取的电梯液压缓冲器隐患识别关键技术
图2为LSTM运动状态识别网络,由输入层、RNN层、全连接层、输出层构成,横向深度为时间维度上网络长度,网络前一时刻信息通过记忆通道传输至下一时刻,并进行筛选。网络输入层为缓冲器位移信息X,输出层为缓冲器运动状态向量C。
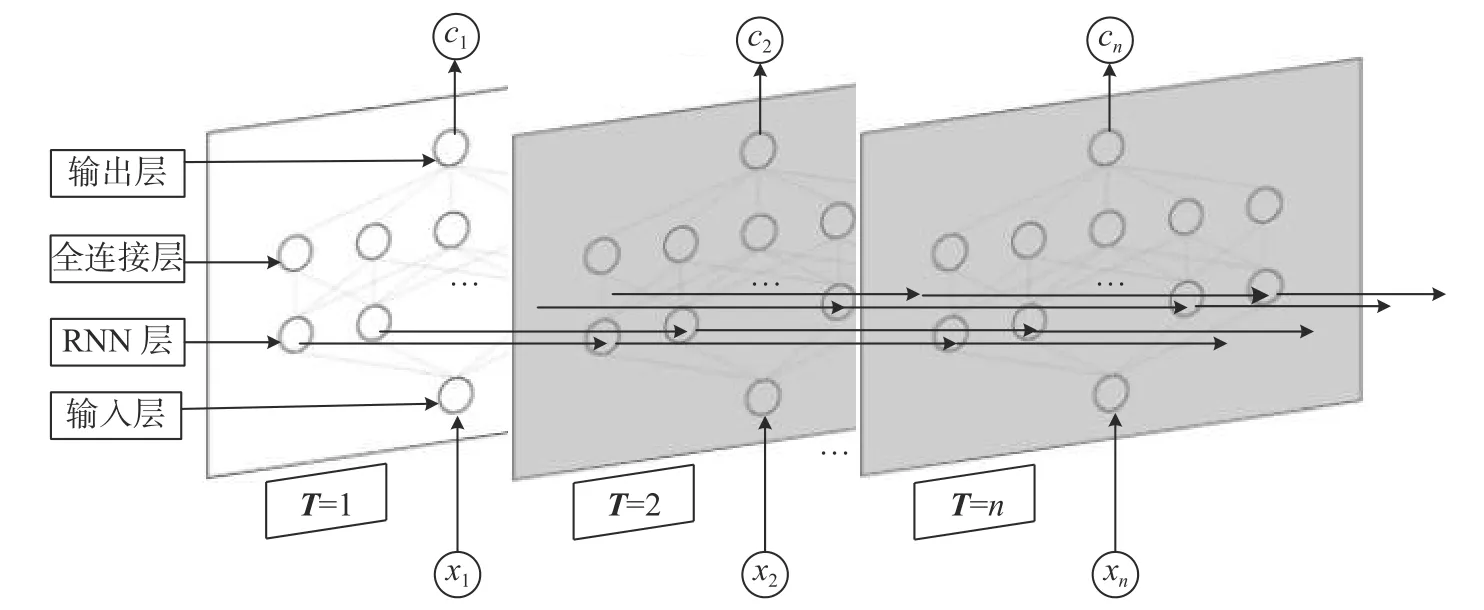
图2 LSTM运动状态识别网络
2.1 缓冲器压缩复位信息数据采集
图3为数据采集系统示意图。在缓冲器顶端安装磁吸式激光反射板,在反射板垂直下方安装激光测距传感器,采集传感器到反射板直线距离,即可获得缓冲器位移信息。检测开始电梯轿厢停在地面,电机施加驱动力将轿厢压入底坑对缓冲器进行压缩;压缩完成,电机撤去驱动力,经过一段时间,轿厢重新提起,缓冲器复位,即激光测距传感器采集缓冲器压缩复位过程完整位移信息。
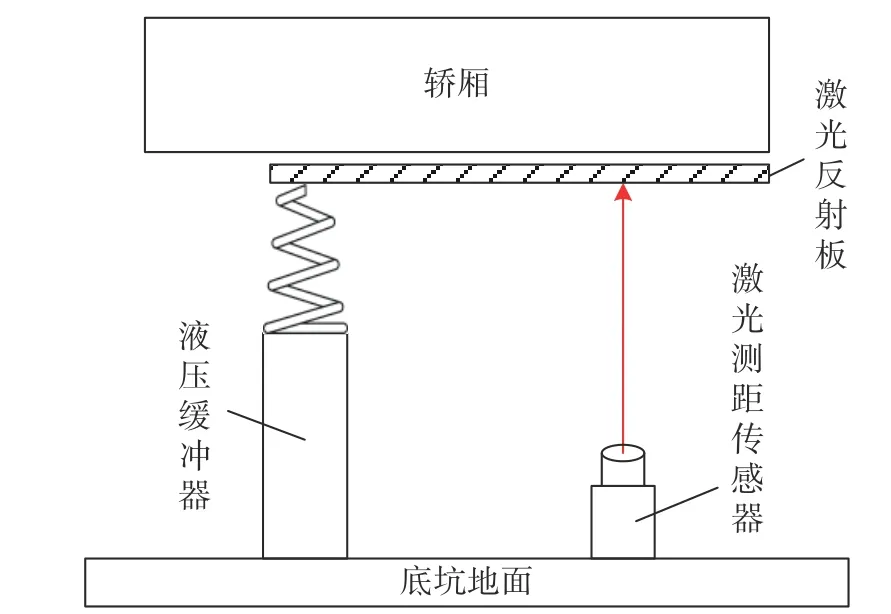
图3 数据采集系统示意图
2.2 基于LSTM压缩复位关键点提取技术
图4为缓冲器压缩复位位移曲线图。对缓冲器进行一次完整压缩复位过程,激光测距传感器采集得共有N个数据点,缓冲器位移信息X=[x1,x2,x3,···,xi,···,xN],第i个数据点位移信息记为xi,缓冲器时间信息T=[t1,t2,t3,···,ti,···,tN],第i个数据点时间信息记为ti。缓冲器压缩复位过程包括开始、压缩、保持、复位、结束5种状态,可提取出过程中的压缩起始点istart、压缩结束点icompress、复位起始点ireturn、复位结束点iend4个运动关键点。
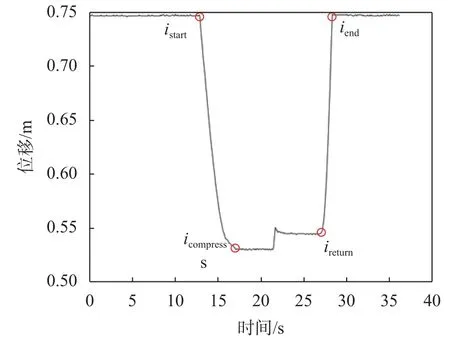
图4 缓冲器压缩复位位移曲线
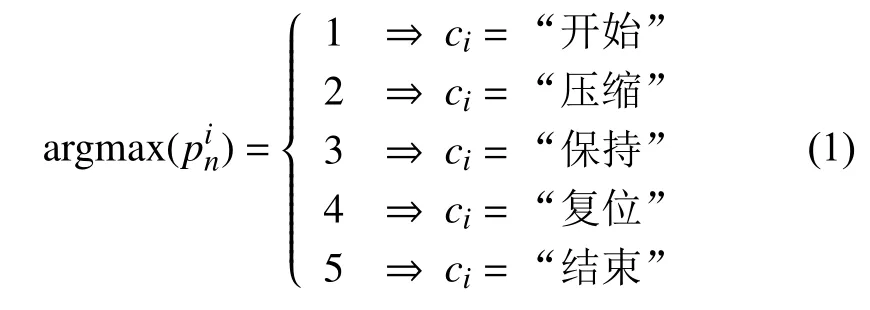
缓冲器位移变化信息输入LSTM运动状态识别网络,识别电梯运动状态,全连接层输出缓冲器当前时刻运动状态概率向量Pcond=[pi1,pi2,pi3,pi4,pi5],pin为缓冲器所处运动状态:开始、压缩、保持、复位、结束的概率,使用argmax激活函数选取运动状态概率最大值,并输出缓冲器运动状态向量C=[c1,c2,c3,···,ci,···,cN]:
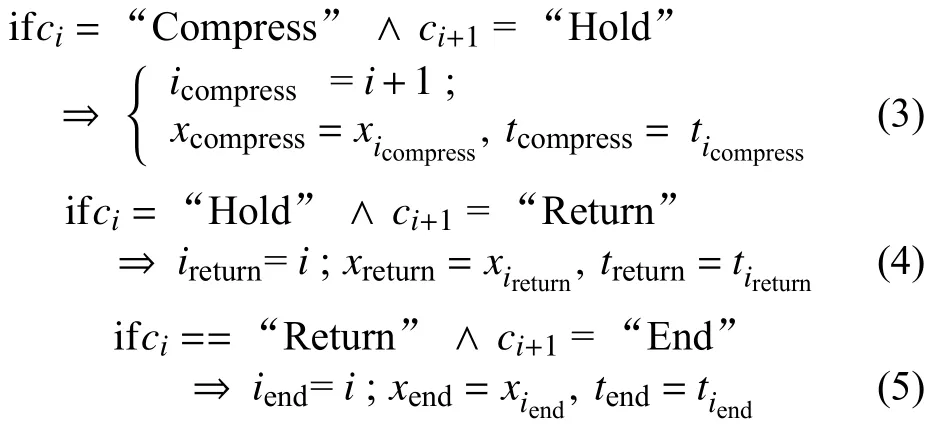
LSTM运动状态识别网络识别电梯运动状态,识别压缩起始点istart、压缩结束点icompress、复位起始点ireturn、复位结束点iend,计算对应位移、时间信息:

2.3 缓冲器压缩复位特征提取与模式识别技术
缓冲器各种隐患在其压缩复位过程特征信息上会有相应表现特征,如缓冲器油量不足将导致缓冲器缓冲效果下降,使压缩速度上升,压缩曲线呈直线下降趋势。表1是缓冲器常见隐患对应特征表现,箭头向上代表对应值增大,箭头向下代表对应值减小。
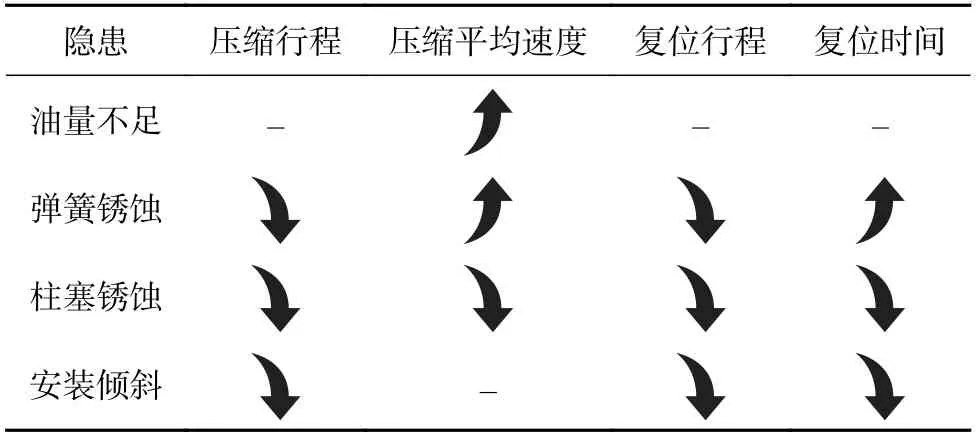
表1 缓冲器常见隐患对应特征表现
使用特征计算公式,对关键点位移、时间信息进行计算,获得缓冲器压缩行程Δxcompress、压缩平均速度vcompress、复位行程Δxreturn、复位时间Treturn特征信息:
通过表1对缓冲器隐患所对应的特征表现分析,以vcompress、Δxcompress、Treturn、Δxreturn4个特征作为输入,使用决策树算法进行机器学习,得到隐患识别模型,图5为决策树隐患识别模型结构图。隐患识别过程中,将计算得到的特征信息输入决策树模型,经过4个结点的判断,可得到隐患识别结果输出(含正常、油量不足、柱塞锈蚀、弹簧锈蚀、安装倾斜等)。
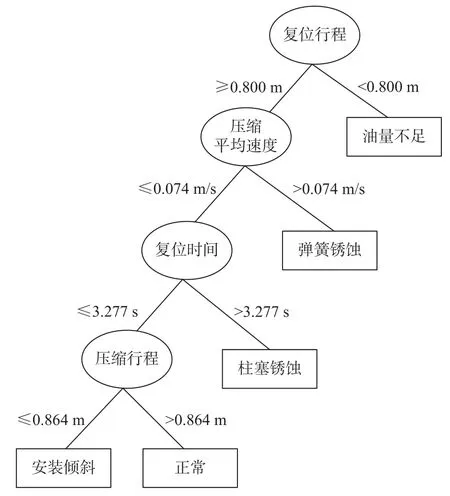
图5 决策树隐患识别模型结构图
3 试验研究
使用40组已标注运动状态的电梯液压缓冲器压缩复位数据进行深度学习,训练LSTM网络,设置RNN层深度为100,全连接层深度为5,每个训练周期内迭代次数为1000次,经过45 min训练,模型损失loss达到0.15后,得到LSTM状态识别网络模型。
本文实验在广东珠海香洲区泰锋电器进行,实验对象为4台昱奥GeN2乘客电梯及底坑安装的液压式缓冲器,选用测量误差为±2 mm的LRFS-0040-1/2激光测距传感器进行数据采集,对检测系统进行现场布置,图6为检测系统现场布置图。

图6 检测系统现场布置图
试验对正常工作的一号缓冲器进行5次检测,表2为一号缓冲器实验结果,缓冲器由正常工作状态经过3次压缩复位后出现油量不足隐患,对具有故障的二号、三号、四号缓冲器进行共6次检测,表3为二号缓冲器实验结果,表4为三号缓冲器实验结果,表5为四号缓冲器实验结果。结果显示,隐患识别率达100%。
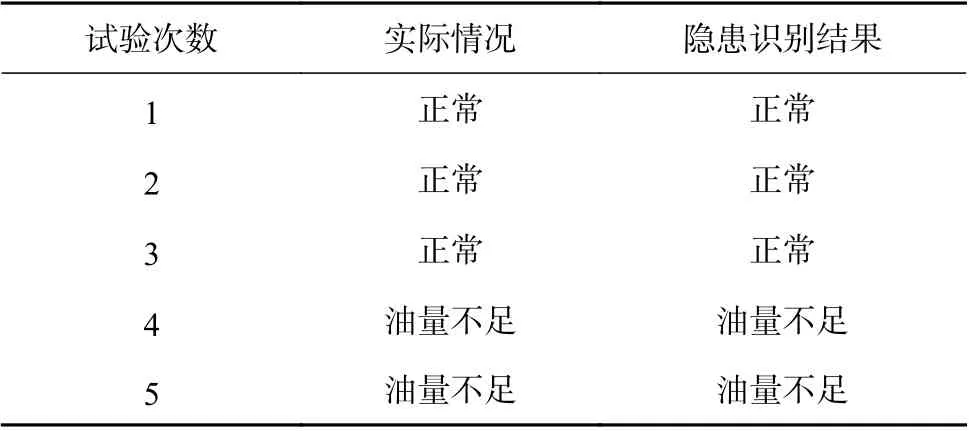
表2 一号缓冲器实验结果
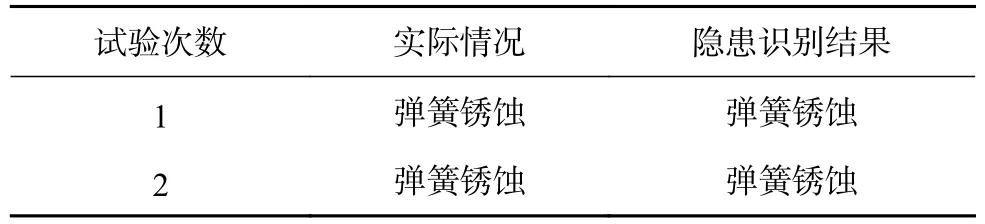
表3 二号缓冲器实验结果
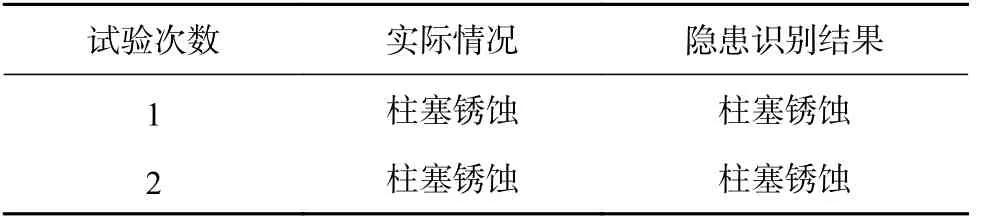
表4 三号缓冲器实验结果
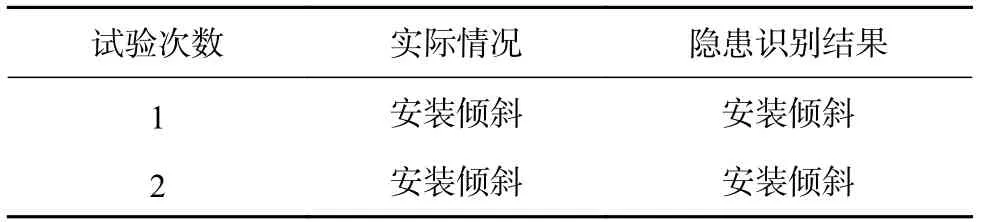
表5 四号缓冲器实验结果
4 结束语
本文提出一种基于LSTM特征提取的电梯液压缓冲器隐患识别方法,有效提高了检测效率、准确度、自动化、智能化、可溯源性水平。本方法创新点为:
1)提出基于LSTM电梯液压缓冲器压缩复位关键点提取技术,构建LSTM运动状态识别网络,可识别压缩起始点、压缩结束点、复位起始点、复位结束点等关键点。
2)提出电梯液压缓冲器压缩复位特征提取计算方法,分析缓冲器常见隐患及对应特征表现,提出基于决策树算法的隐患识别方法,构建隐患识别模型,试验结果表明隐患识别准确率达到100%。
下一步将继续改进关键点提取技术及隐患识别算法,对关键点提取准确率进行优化,实现缓冲器隐患识别无人化、智能化。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
城市轨道交通研究(2022年6期)2022-07-15
建材发展导向(2022年3期)2022-04-19
轻兵器(2022年3期)2022-03-21
建材发展导向(2022年2期)2022-03-08
装备维修技术(2021年44期)2021-02-17
河南科技(2019年11期)2019-09-10
电机与控制学报(2018年9期)2018-05-14
广东教育·高中(2017年10期)2017-11-07
计算机应用(2016年10期)2017-05-12
