
高速目标分阶段博弈拦截制导策略
2022-10-14 03:33王鑫闫杰孟廷伟
航空学报 2022年9期
王鑫,闫杰,孟廷伟,*
1.西北工业大学 航天学院,西安 710072 2.西北工业大学 无人系统技术研究院,西安 710072
由超燃冲压发动机提供动力的吸气式高超声速飞行器(Airbreathing Hyper-sonic Vehicle, AHV)具有航程远、飞行高度高、速度快、突防能力强等突出优点,极大地压缩了防御方的准备和反应时间,超出了现有防空武器的拦截能力。美俄等针对AHV相关技术的研究及验证已长达数十年之久。相关资料显示,新型高超声速飞行器的研制已迈向武器化阶段。来自于临近空间的现实威胁日益突出,研究针对此类飞行器的拦截技术需求迫在眉睫。受到发动机性能、热防护、气动布局、制导控制律等约束,AHV机动能力及机动特征存在一定的限制及规律性。复杂环境下拦截弹和高速目标的攻防对抗可以看作是动态博弈的过程,而针对攻防博弈的相关研究主要集中在飞行器弹道规划、单边最优导引律和微分对策导引律3个方面。张大元等研究了拦截弹轨迹规划的问题,综合考虑终端速度、终点脱靶量和气动加热3个因素,并通过粒子群算法求解弹道。在单边最优制导律方面,文献[2]基于线性二次型理论提出了一种最优控制的协同制导律,该制导律保证多弹在拦截时相对机动目标具有一个有利的几何态势。来自不同方向的拦截弹集群完成对目标的饱和攻击。为了提高拦截弹间的通信性能,文献[3]基于线性二次最优控制方法提出了一种协同制导律,使得在拦截机动目标时相邻导弹间的相对视角的变化率趋于零。该制导方法的典型应用场景是保证齐射导弹之间可以使用定向天线进行通信,从而提高通信性能。
在微分对策制导律方面,Nobahari和Nasrollahi将受不确定性影响的弹目二维交战场景表述为非线性微分博弈模型,并将其转换为非线性模型的预测微分对策控制问题,提出了一种基于粒子群的动态优化算法。通过蒙特卡罗分析以及与传统制导算法的对比仿真验证该算法的实现能力和性能。Shaferman和Shima基于协同微分对策研究了多个拦截器从不同方向拦截机动目标的制导问题,基于二人零和微分博弈框架,防御方和目标组成博弈双方,基于设计的制导律使得多个拦截器间构建的几何态势满足拦截需求,且相对拦截弹角度的要求不会产生额外的过载需求。
除了上述针对高速目标动态博弈的拦截形式外,在其他方面国内外学者作了大量研究。郭正玉等提出了一种分布式有限时间协同制导律。为了对攻击时间和攻击角度进行约束,对各拦截弹的视线方向、视线纵向和视线法向加速度分别设计,达到同时多角度协同攻击的效果。Yuksek等研究了针对高机动目标的多拦截器合作和非合作下的拦截问题,拦截器可以通过共享信息实现对目标的精确跟踪。Chen等建立协同拦截三维非线性模型,提出多枚导弹的协同覆盖策略及协同制导律,并设计制导参数及拦截器数量动态调整策略。在智能协同拦截方面,文献[9]基于强化学习提出了一种新的制导律,该制导形式不需要进行距离估计,仅需要观测导引头视线角及其变化率,因此适合用于被动导引头。基于强化元学习的优化策略能够适应目标加速度,相对最优制导形式具有更好的性能。
通过分析可知,上述文献中提出的多弹协同策略有饱和攻击和全覆盖攻击两种,然而在实际拦截过程中多弹很难一次对目标实施准确拦截。此外,上述文献均未考虑目标在中制导过程可能做出的突防策略。因此,在结合高超声速目标运动特征的基础上整体考虑目标的拦截过程。文献[10]在多弹协同拦截的展望中提出,针对拦截目标的高速和高机动性能,多弹的时空匹配性至关重要。在上述背景下,本文结合吸气式高超声速目标的运动特征,积极探索一种新型的多弹拦截机制,增大拦截系统复杂环境下对于高速大机动目标的拦截概率。
1 数学模型与拦截系统框架
1.1 目标动力学建模
考虑地球为球形,不考虑地球自转,AHV目标动力学方程为

(1)
式中:为地心距;和为经纬度;为地球相对速度;为航迹角;为航向角;为滚转角;为攻角;为发动机比冲(N·s/kg);、、分别为发动机推力、气动升力、气动阻力;为飞行器质量;为重力加速度。
具有乘波体构型的吸气式高超声速飞行器表面气动力可以通过斜激波方程及普朗特-迈耶方程进行求解。文献[12]对AHV的气动特性机理模型进行分析,气动力表示为
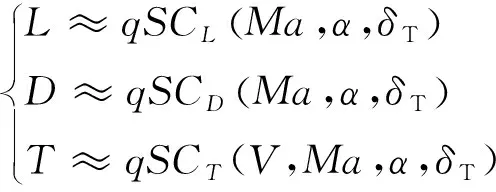
(2)
式中:为动压;为飞行器参考面积;为马赫数;为燃油当量比;、、分别为升力系数、阻力系数、推力系数。
此外,AHV在飞行过程中需要满足过程约束,包括热流约束、过载约束以及动压约束
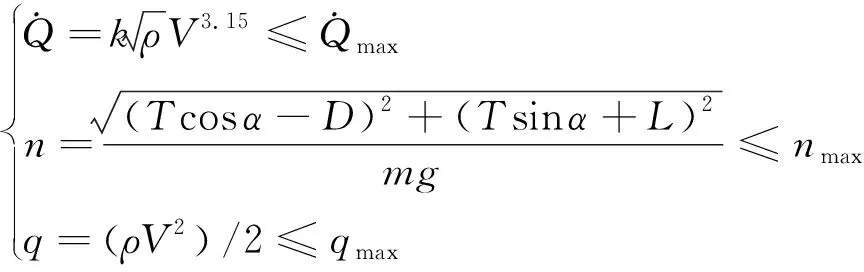
(3)

(4)
1.2 拦截弹动力学建模
将拦截弹视为可控质点,动力学方程为
(5)
式中:、、为惯性系坐标;为拦截弹速度;、m为弹道倾角和弹道偏角;、为攻角和侧滑角;、、为气动阻力、升力和侧向力;为发动机推力。
拦截弹自动驾驶仪近似为二阶动态环节为

(6)
式中:为阻尼比;为自然角频率;为拦截弹加速度;为制导指令。此外,拦截弹存在过载约束
=(sin+)
(7)
=(cossin+)
(8)

(9)
1.3 分阶段协同拦截方案设计
图1 分阶段拦截时序图Fig.1 Sequence diagram of interception in stages
拦截系统包含两枚拦截弹,记为拦截弹I和拦截弹II。拦截弹I在整个拦截过程中主要负责通过第一阶段对抗减弱目标机动能力。拦截弹II则是在形成态势压制的基础上与目标直接进行动态博弈,使得拦截弹II可以适应复杂的博弈环境,从而提高对目标的拦截精度。需要注意的是,分阶段协同是时间上的协同,分别对各拦截弹的时间进程进行设计。
1)~:拦截弹I中制导过程。空基平台在时刻发射拦截弹I,目标运动信息由地面雷达提供。在此阶段,拦截系统依据目标运动信息、目标物理属性及任务属性对在交汇平面上的可达范围及“虚拟交班点”进行计算,并完成最优中制导过程,在时刻拦截弹I完成交接班。
2)~:拦截弹I末制导过程。拦截弹I通过末制导使目标在突防过程中失去机动能力优势,对目标形成态势压制。
3)~:拦截弹II的中制导过程。空基平台时刻发射拦截弹II,且需要对发射时间间隔在满足(-)<(-)的约束下进行优化。拦截弹II依据弹目相对运动关系进行最优中制导,在时刻完成交接班。拦截弹II在~时间段内由地面雷达提供目标信息,在~由拦截弹I提供目标信息。
4)~:拦截弹II末制导过程。拦截弹II以直觉模糊博弈理论为基础,建立弹目动态博弈模型。结合多属性评估,通过纳什均衡求解拦截弹混合策略,保证拦截弹对目标拦截的综合收益。
由于AHV在巡航段经历时间较长,此阶段也可以使用多个由拦截弹I和拦截弹II组成的拦截单元对目标进行拦截,推导的原理相同,在此略。
2 中制导过程设计
2.1 拦截弹I中制导设计
2.1.1 预测交汇平面
AHV在执行任务过程中会经历爬升段、巡航段以及俯冲攻击段。假设巡航段初始时刻AHV位置(地心距,经度,纬度)为(,,),敌方攻击目标(,,),定义点、和地心所在的平面为面。
排练时,为了让孩子们更有代入感,我打扮成“与平叔叔”,裹上日式头巾,抹一道黑炭小胡子,穿着日式服装,和孩子们一起唱啊、跳啊、闹啊,大家马上兴奋起来,投入剧情之中……你看我像不像从日本来的小伙子?其实,我都八十多岁了!
预测交汇平面满足:① 垂直于面;② 某一时刻拦截弹I和AHV同时在该平面上,该时刻即为预测交汇时刻,记为。将目标在交汇平面上的最大机动范围定义为预测目标可达范围,记为R。
目标垂直于面的速度分量为,通过算法预测在未来一段时间内的变化情况。基于最小二乘法对目标速度进行拟合
(10)
式中:为离散时间序列;为多项式的参数;为曲线模型的阶数。
定义目标函数
(11)

2.1.2 虚拟拦截点设计
通过位置几何关系可以求得交汇平面在惯性系下的表达式。以交汇时刻为节点将目标巡航段分为两个阶段。通过高斯伪谱法求解满足约束条件目标在交汇平面的最大的可行范围。AHV轨迹约束除式(1)~式(4)外,有
阶段1初始状态:

(12)

阶段1终端状态:

(13)

阶段2初始状态:

(14)
阶段2终端状态:

(15)
两个阶段的代价函数可以表示为

(16)
目标预测到达位置(,,)的求解式为
(17)
式中:、、为惯性坐标系下目标当前位置坐标;T、T、T为目标在惯性坐标系各轴的速度分量;=(1-e-),且0<<1, 03≤≤05,参数可有效修正目标机动时的预测拦截点;为剩余飞行时间。

(18)

“虚拟拦截点”的设计思想是:为了使拦截弹I在末制导阶段对目标形成态势压制,即在对抗过程中迫使目标机动到可达边界处,虚拟拦截点必须位于目标预测位置与可达边界几何中心之间,三者关系如图2所示。
图2 “虚拟拦截点”定义Fig.2 Definition of “virtual interception point”
虚拟拦截点可以通过式(19)计算得到

(19)
式中:(,,)为几何中心的位置坐标。此外,的取值需要满足
(20)
其中:为拦截弹导引头的探测距离。
2.1.3 拦截弹I最优中制导模型
首先计算出中末交班点处导弹期望速度终端角和。期望的终端角是指在预测交班点处弹目的视线角速率为0 rad/s时导弹的速度指向,在中末交班点处拦截弹期望速度倾角为

(21)
式中:、、T分别为纵向平面的弹目视线角、拦截弹速度、目标速度;为目标弹道倾角。在侧向平面以同样方式求解。
拦截弹I的虚拟交班位置表示为

(22)
因此,拦截弹I中制导初始时刻,交班时刻,中末交班条件可以表示为
(23)
(24)
最优中制导性能指标为
=()
(25)
拦截弹I最优中制导律设计目标:满足动力学约束式(5),边界约束式(23)和式(24),控制约束式(9),确定制导指令和使得性能指标式(25) 达到极大。
需要指出拦截弹I中制导设计的思想:为了使拦截弹I在对抗过程中对目标形成态势压制,减弱其机动能力。需要通过中制导将拦截弹I导引到由虚拟拦截点解算得到的虚拟交班点处,此时拦截弹I-目标相对关系如图3所示,此时目标突防域相对于拦截弹I的拦截域更靠近边界(边界处对于目标不利),因此经过末制导对抗目标机动能力将大大减弱。
图3 预测交汇平面Fig.3 Plane of prediction encounter
2.2 拦截弹II中制导设计
拦截弹II中制导过程同样采用最优中制导律。由于拦截弹II需要对目标进行精确拦截,因此中制导过程对于最终拦截性能有重要影响。本节对拦截弹II中制导及中末交班条件进行设计。
拦截弹II-目标相对运动方程为

(26)


(27)
()=d,()=d
(28)

(29)
min≤≤max,min≤≤max
(30)

拦截弹中制导性能指标:

(31)
拦截弹II最优中制导律的设计目标:在满足微分方程约束式(26)、边界约束式(27)~式(29)和控制输入约束式(30)的条件下,确定制导指令和以及终端时间使得性能指标式(31)达到极小。
2.3 Gauss伪谱法求解最优控制问题
可以将拦截弹中制导律的设计问题统一描述为一般的最优控制问题,设计性能指标为

(32)
式中:()∈为状态变量;、分别为起始和终端时间。在满足约束式式(33)~式(35)的基础上求解控制变量()∈,使得性能指标式(32) 最小。
动力学微分方程约束为

(33)
边界条件为
((),,(),)=
(34)
路径约束为
((),(),)≤
(35)
本文采用高斯伪谱法(Gauss Pseudospectral Method,GPM)对拦截弹I和拦截弹II的中制导最优轨迹进行求解。GPM求解基本过程:把时间轴按照拉格朗日-高斯(Legendre-Gauss,LG)方法离散为一系列的时间点,然后对系统状态变量和控制变量进行离散,从而使系统的状态方程、约束条件以及性能指标函数通过上述离散量表示出来。上述过程将优化问题转化为非线性规划(Nonlinear Programming,NLP)问题,然后采用成熟的序列二次规划(Sequential Quadratic Programming,SQP)方法进行求解。GPM方法具有求解精度高、收敛速度快、对初值不敏感等优点。
3 末制导过程设计
3.1 拦截弹I末制导设计
末制导过程弹目相对运动关系如图4所示,视末制导初始时刻拦截弹和目标的弹道坐标系和为惯性系,为视线坐标系,和为视线偏航角和视线俯仰角。
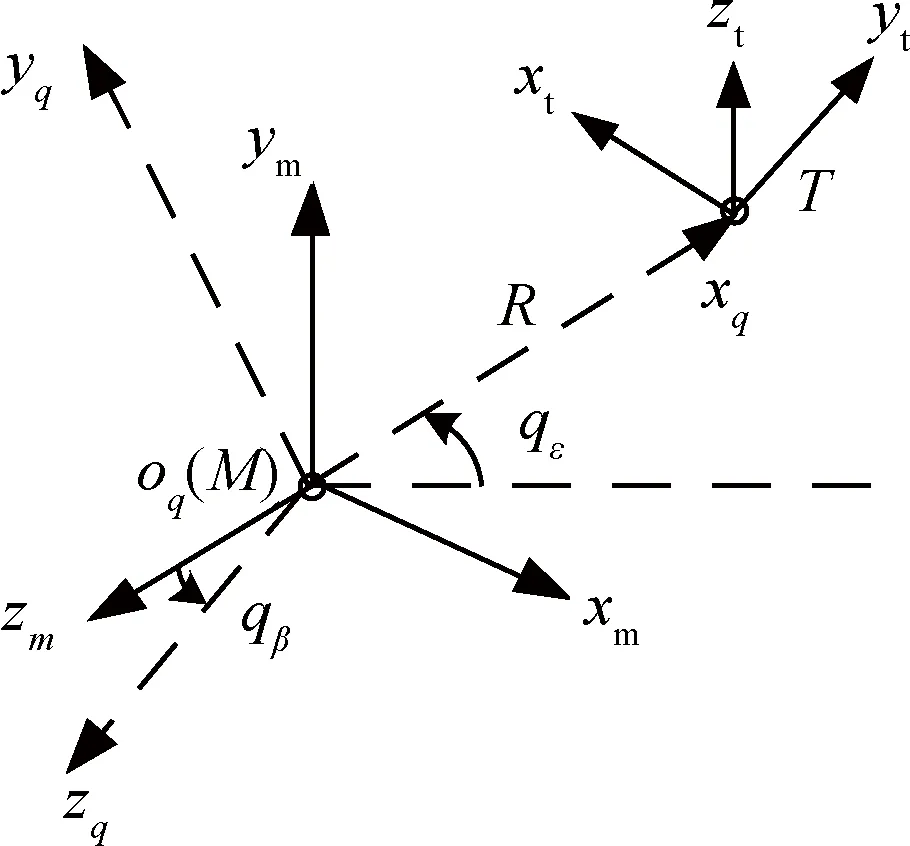
图4 弹目相对运动模型Fig.4 Missile-target relative motion model
定义视线法向速度制导模型

(36)

依据文献[15]对三维制导律的广义设计方法,视法向速度模型下的广义制导律设计为
(37)

考虑如下李雅普诺夫方程
(38)
将制导律式(37)代入模型式(36),并对式(38) 求导得到






(39)

3.2 拦截弹II末制导设计
拦截弹和目标实际对抗环境较为复杂且具有模糊特性,应用基于精确物理模型设计的制导策略可能会导致较差的制导性能。为了使拦截弹II在具有机动优势的基础上提高对目标的拦截精度,针对拦截弹II和目标的攻防对抗,采用基于直觉模糊的动态博弈模型,结合多属性评估方法以及支付矩阵直觉模糊表示,有效求解博弈双方动态策略,确保拦截方获得最大收益。
3.2.1 策略评估属性
拦截弹制导策略通过制导精度、能量消耗以及弹道特征3个属性来进行评价。基于直觉模糊理论将各评价因素用模糊语言划分成7个等级,采用分档模糊集法对信息进行模糊化。
依据专家经验获得属性(=1,2,3)相对于属性(=1,2,3)的重要标度,且与互为倒数,计算各项属性的权重为
(40)
式中:(=1,2,3)为属性的权重。
3.2.2 直觉模糊矩阵博弈模型
拦截弹-目标末制导过程是典型的二人有限非合作零和博弈模型,基于直觉模糊理论的博弈模型可以由五元组={,,,,}表示:
1)={,,…,}和={,,…,}分别为拦截弹和目标的策略集,由直觉模糊数=(,)对策略进行定量评价,其中∈[0,1],∈[0,1], 0≤+≤1。

3) 混合策略空间:
(41)
式中:、为策略∈、∈的选择概率。依据直觉模糊运算求得期望收益函数:


(42)
4) 求解均衡策略。基于得分函数法对直觉模糊数进行排序。基于上述全序关系的纳什均衡条件:若存在(,),对于∀∈, ∀∈有
(,)<(,)<(,)
(43)
则混合策略(,)为满足博弈模型的均衡策略。依据矩阵博弈的最大最小法则,通过得分函数展开,博弈问题可以转换为非线性规划模型进行求解,并将对偶非线性规划模型合并,


(44)
(45)
将最优化问题式(44)转化为无约束模型,进而可以通过差分进化算法得到其最优解式(45),即均衡策略解。
3.2.3 博弈双方策略集设计
1) 拦截弹策略集
拦截弹II动态策略由基础制导律和参数调节组成。基础制导律和拦截弹I形式一致,该制导律涉及3个关键参数、1、2,=1,2,严重影响拦截弹II制导性能。可以通过优化制导参数作为拦截弹博弈策略。从李雅普诺夫稳定性的角度而言,制导参数需满足>0;1,2>0;=1,2。通过分布特征求取参数的概率均匀离散水平,根据文献[23]介绍的数论方法,生成拦截弹II的均匀策略集。
2) 目标策略集
所研究AHV类型目标具有以下特征:① 乘波体结构;② 具有超燃冲压发动机;③ 采用倾斜转弯方式(BTT)实现横向机动。由1.1节建立的AHV动力学模型可知,目标机动方式与飞行器在弹道坐标系各轴的加速度有关。定义为目标在弹道系中的净加速度,可通过升力、阻力以及推力经过坐标转换获得,表示为

(46)
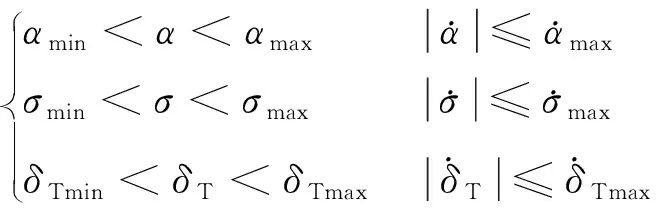
由式(46)分析可知,目标机动形式与攻角、滚转角以及燃油当量比直接相关。在没有先验信息的情况下,为了使超燃冲压发动机正常工作,取服从[-3°,10°]上的均匀分布;取服从[-30°,30°]上的均匀分布;取服从[0.2,1]上的均匀分布。依据参数分布特征求取参数,和的概率均匀离散水平,根据文献[23]介绍的数论方法,生成AHV目标均匀模型集。
4 仿真验证
本节对提出的分阶段拦截方案进行全过程仿真,验证该方案的有效性。
4.1 拦截弹I中制导过程
首先对拦截弹I的虚拟交班点进行预测。假设AHV在巡航段存在以下约束:
1) 初始状态约束:

(47)
式中:为平均地球半径。
2) 终端状态约束

(48)
3) 过程约束
≤50 kPa,≤4,≤600 kW/m
(49)
4) 控制约束
-3°≤≤10°,-30°≤≤30°,02≤≤1
(50)
假设通过速度拟合预测交汇时间=450 s,预测交汇面=30°。通过多阶段优化可以得到AHV在交汇平面的可达边界及虚拟拦截点。
使用Gpops-II软件实现hp自适应伪谱法的优化计算。通过hp自适应伪谱法对目标轨迹进行分阶段优化,求得目标在预测交汇平面的可达边界(见表1),虚拟拦截点位置为(=30°,=0.021°,=+30.897 km)。表1中结果均为时间和飞行器运动状态的函数,因此随攻防对抗过程表1动态变化。

表1 目标可达边界离散点Table 1 Discrete points of target’s accessible boundary
获得虚拟拦截点的坐标位置后,经过坐标变换,虚拟拦截点在发射点惯性系中的位置为:(120,24,-3.4) km。通过最优控制算法为拦截弹I设计最优轨迹,使得在中末交班时刻速度最大,且满足交班条件。
如图5所示,拦截弹I从发射平台经过两次助推,最终无动力导引到预测交班位置。且保证在交班位置满足弹道倾角和弹道偏角约束。最优中制导律保证拦截弹在交班位置处的速度最大,如图6所示。

图5 拦截弹I最优轨迹Fig.5 Optimal trajectory of Interceptor I
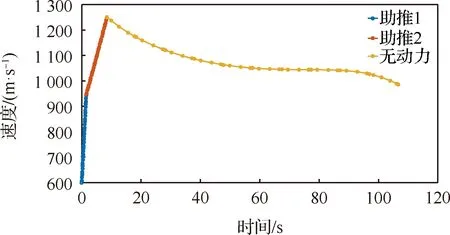
图6 拦截弹I速度Fig.6 Speed of Interceptor I
4.2 拦截弹II中制导

图7 拦截弹II-目标相对距离Fig.7 Interceptor II-Target relative distance
图8 拦截弹II-目标视线俯仰角Fig.8 Interceptor II-Target line of sight pitch angle

图9 拦截弹II-目标视线偏航角Fig.9 Interceptor II-Target line of sight yaw angle
4.3 拦截弹I和拦截弹II末制导
拦截弹I的末制导过程对制导精度不高,主要完成对目标的态势压制,不需要对制导参数进行动态调整。拦截弹II在顺利完成交接班的基础上,为了提高对目标的拦截概率,需要在拦截过程中动态调整制导参数。假设博弈周期为500 ms。博弈策略采用多属性评评估方式,制导精度、能量消耗和弹道特征的属性权重分别为:0.5,0.25,0.25。
通过计算得到各博弈周期内弹目双方的均衡策略以及策略收益得分。计算得到第一个博弈周期内的策略收益分值为0.659 7。拦截弹和目标随机生成30组混合策略,并分别计算策略收益。如图10所示,可以看出任意一方取随机策略使得己方收益减少对方收益增加。

图10 均衡策略验证Fig.10 Equilibrium strategy verification
为了验证动态博弈策略的有效性,需要对拦截弹II在动态策略和固定策略下的仿真结果进行对比分析。假设目标也选择动态博弈策略,即为目标综合收益最优的策略。依据多属性评估原则,从制导精度、能量消耗及轨迹特征3个方面对制导策略进行分析。图11和图12分别为动态策略和固定策略下“拦截弹II-目标”的视线法向速度。固定策略不能适应所有态势,通过对比发现固定策略下视线法向速度变化大且存在无法收敛到零的情况,表明固定策略制导精度收益低。图13 和图14分别为动态策略和固定策略下拦截弹道坐标系各轴加速度的变化情况。对比可以看出固定策略在制导过程中需要消耗更多能量来修正弹道。因此动态策略能量消耗收益更高。图15 和图16分别为动态策略和固定策略下拦截弹道倾角/偏角的变化情况,在动态策略下拦截弹道更加平缓。因此动态策略轨迹特征收益更高。综合仿真结果,拦截弹II在动态策略下的综合收益高于固定策略。上述结果验证了当博弈双方中的一方采取除均衡策略以外的随机策略时,其综合收益会减小。图17是动态策略和固定策略下进行多次仿真的脱靶量结果,动态策略制导精度更高。

图11 动态策略视线法向速度Fig.11 Dynamic strategy line of sight normal velocity
图12 固定策略视线法向速度Fig.12 Fixed strategy line of sight normal velocity

图13 动态策略拦截弹道各轴加速度Fig.13 Dynamic strategy acceleration of intercept missile in trajectory coordinates
图14 固定策略拦截弹道各轴加速度Fig.14 Fixed strategy acceleration of intercept missile in trajectory coordinates
图15 动态策略拦截弹道倾角/偏角Fig.15 Dynamic strategy inclination and deflection angle of interception trajectory

图16 固定策略拦截弹道倾角/偏角Fig.16 Fixed strategy inclination and deflection angle of interception trajectory
图17 脱靶量统计Fig.17 Miss distance statistics
目标采用最优机动的策略,拦截弹II也需要采用动态均衡策略进行博弈对抗。图18为拦截弹I与拦截弹II对目标进行协同拦截的弹目轨迹图。由于机动能力约束和存在交班误差等原因,拦截弹I对目标不直接进行碰撞拦截。但是拦截弹I可以通过干扰对抗对目标形成态势压制。假设拦截弹II和目标中末交班时刻在交汇平面上的可达域分别为Are和Are,定义拦截弹II的拦截态势系数为(Are∩Are)/Are,通过拦截态势系数可以评价拦截弹II-目标的攻防态势,拦截态势系数越高说明拦截弹相对于目标在攻防态势上越具有优势。为了验证拦截弹I和拦截弹II分阶段协同的有效性,分别进行了协同和非协同情况下的弹目博弈仿真。这里非协同指使用单枚拦截弹II与目标直接进行动态博弈。图19为协同和非协同条件下拦截弹II的拦截态势系数,可以得出协同条件下拦截弹I的对抗使得目标态势受到压制,进而导致拦截弹II的拦截态势系数的均值高于非协同拦截情况,使得对目标的拦截概率增大。图20为协同和非协同条件下的最终脱靶量和平均综合收益的仿真结果。综合分析,由于非协同条件下在弹目动态博弈之前防御方没有拦截器对目标机动施加约束,目标的可执行策略空间相较于协同情况下要大,导致整个博弈过程拦截弹II综合收益降低。仿真结果表明两弹协同条件下拦截弹II可以更好发挥动态博弈的优势,最大化博弈综合收益,提高拦截弹II对目标的拦截概率。
图18 弹目运动轨迹Fig.18 Trajectory of missile and target

图19 拦截态势系数Fig.19 Coefficient of intercept situation
图20 协同与非协同对比仿真Fig.20 Comparative simulation of cooperative and non-cooperative
5 结 论
1) 本文基于AHV动力学模型对该类型目标在巡航阶段的典型轨迹特征进行分析,在此基础上提出对目标进行多阶段协同拦截的策略。基于策略的完整性为各阶段设计了任务目标和方案。
2) 拦截弹I的目标是通过第一阶段对抗减小AHV的可行域及减弱其机动能力。进行目标速度预测以及交汇平面的可达范围和虚拟拦截点的计算,本文为拦截弹I设计了基于虚拟交班点的最优中制导律以及广义三维末制导律。
3) 拦截弹II需要对目标进行精确拦截,要适应可能出现的复杂态势。为了顺利完成中末交班,拦截弹II中制导过程采用基于弹目相对运动模型的最优中制导律。在末制导阶段需要为拦截弹设计可行的动态策略。基于直觉模糊理论、多属性评估方法以及博弈理论对弹目对抗进行建模,通过模型转化获得拦截弹动态均衡策略。结果显示该方案最终拦截效果符合设计要求。上述方案为在复杂和不确定性环境下拦截高速机动目标提供新的解决思路。
猜你喜欢
弹道学报(2022年3期)2022-10-08
考试与评价·高二版(2021年1期)2021-09-10
兵器知识(2020年8期)2020-08-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
兵器知识(2018年6期)2018-06-15
兵器知识(2018年3期)2018-03-07
兵器知识(2018年2期)2018-02-08
兵器知识(2018年1期)2018-01-05
兵器知识(2017年8期)2017-10-16
