多普勒测风激光雷达与L波段探空对比分析
2022-10-13 11:37:36李林张治国杜传耀韦涛于丽萍范雪波
大气与环境光学学报 2022年5期
李林,张治国,杜传耀,韦涛,于丽萍,范雪波*
(1北京城市气象研究院,北京 100089;2北京市气象探测中心,北京 100176)
0 引言
大气风场是气候学和天气学研究的重要内容,是大气中水循环、海气交换、气溶胶输运以及天气变化的主要动力,精确可靠的风场数据可以提升数值天气预报的准确性。大气垂直风场观测最主要的方式是通过探空气球进行观测,为了提高垂直探测的时间分辨率,20世纪70年代,一些国家开始相继研制风廓线仪。1989年,中国气象科学研究院研制了风廓线雷达探测系统[1,2],2000年以后在台站进行应用,有研究人员对风廓线雷达的测量精度、定标方法和处理算法进行了分析和研究[3,4]。同时期,多普勒测风激光雷达的相关研究也在开展,从20世纪70年代开始,美国国家航空航天局(NASA)等机构开展了相干多普勒测风激光雷达的研究[5]。NASA与美国国家海洋和大气管理局(NOAA)等组织于1998年联合推出了CO2相干测风激光雷达系统,可探测从地面到30 km高度的风场[6]。2002年我国的非相干多普勒测风激光雷达研制成功[7,8]。后得益于光纤通信技术的发展,相干多普勒测风激光雷达成为主流产品,在风力发电的功率预报和尾流监测等方面得到了较好的应用[9-11];同时因其体积小、便携性好、可扫描等特点,在机场跑道风场的低空风切变的细致结构分析和形成机理研究方面[12,13]得到特别应用。
大气边界层风廓线数据通常通过气象梯度塔、无线电探空仪、系留气艇、L波段风廓线雷达观测获得,但此类观测方法通常存在探测高度、探测频率和垂直分辨率较低等不足,测风激光雷达则可实现边界层内风廓线的高时空分辨率观测。国内诸多研究人员对测风激光雷达的准确性进行过一些评估,夏俊荣等[14]于2007年12月11至14日在中国科学院大气物理研究所325 m的气象塔试验场开展了测风激光雷达与铁塔测风对比试验,二者的相关系数达到或超过0.98;王乔乔等[15]在张家口市张北县国家风光储输试验场,采用Windcube激光雷达测风系统与测风塔测风设备同步观测试验数据,测量数据有效率在140m以下达到97%以上,100m高度风速偏差为-0.197m·s-1,平均风向偏差为-6.2°;陈雯超等[16]分析了不同天气条件下测风激光雷达的性能,测风激光雷达的阵风风速偏大约0.3m·s-1;史文浩等[17]分析了“利奇马”台风期间测风激光雷达与70m测风塔超声风温仪误差,激光雷达水平风速、垂直风速和风向均方根误差分别为1.06m·s-1、0.46m·s-1和17.10°。
鉴于目前已有的对于测风激光雷达探测性能研究分析中存在探测高度比对高度低、比对时间短等不足,本文利用2020年1–5月开展的测风激光雷达(DWL)与L波段探空系统(LRS)对比试验,分析了某型扫描式相干多普勒测风激光雷达在地面至3000m垂直高度范围内的测风性能。
1 对比观测试验介绍
对比试验场地设在北京国家基本气象站(台站号:54511),采用法国Leosphere公司生产的WINDCUBE 100S相干多普勒测风激光雷达(以下简称激光雷达)和南京大桥机器有限公司生产的GFE(L)1型L波段探空系统(以下简称L波段探空)。
所用激光雷达可以实现距设备安装高度50~3000m垂直上空大气水平风速(WS)、水平风向(WD)、垂直风速、信噪比等信息的探测,具有较高的时空分辨率,其主要性能参数如表1所示。激光雷达的波束扫描方式主要有多普勒波束扫描(DBS)、距离高度显示扫描(RHI)、平面位置显示扫描(PPI)和单一径向扫描(LOS)等,本次试验中采用DBS五波束模式,扫描圆锥角为30°,该方法需要的波束少,可以在较短时间内完成扫描,在气流不稳定的情况下也适用。DBS通过获取东南西北4个方位角上的径向风速数据反演风廓线。假设基本风场为均匀风场,并忽略垂直分量,结合扫描圆锥角,利用三角函数关系计算获得不同高度层上的水平风向、风速值,其垂直方向风速则是直接利用垂直波束测量获得。
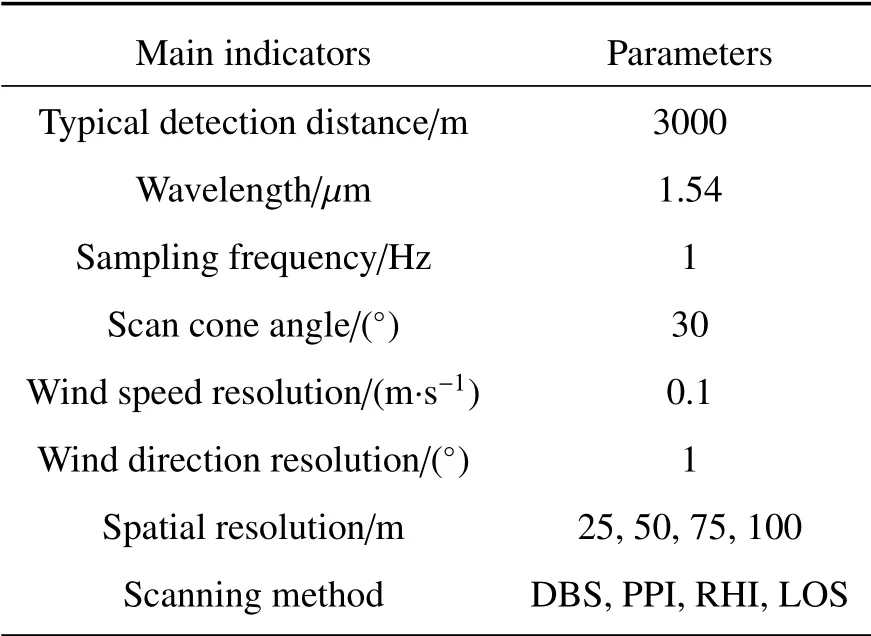
表1 WINDCUBE 100S型激光雷达性能参数Table 1 Specifications of WINDCUBE 100S Doppler wind lidar
L波段探空通过GFE(L)1型测风雷达跟踪探空气球上搭载的电子探空仪,计算获得其自释放点至向上3000m各高度层的水平风速、风向等数据,其测距、测角精度的均方根(RMS)分别≤20m、≤0.08°,主要性能参数如表2所示。本研究将L波段探空获取的风廓线数据作为激光雷达探测数据质量对比的参考标准。测量时,GFE(L)1型雷达在地面向探空仪发射脉冲作为询问信号,探空仪随即产生应答信号,按照原路返回并被雷达天线接收,通过计算信号从雷达至探空仪之间的往返时间可获取直线距离信息,结合方位角、仰角等数据,可推算出高空的风向、风速。
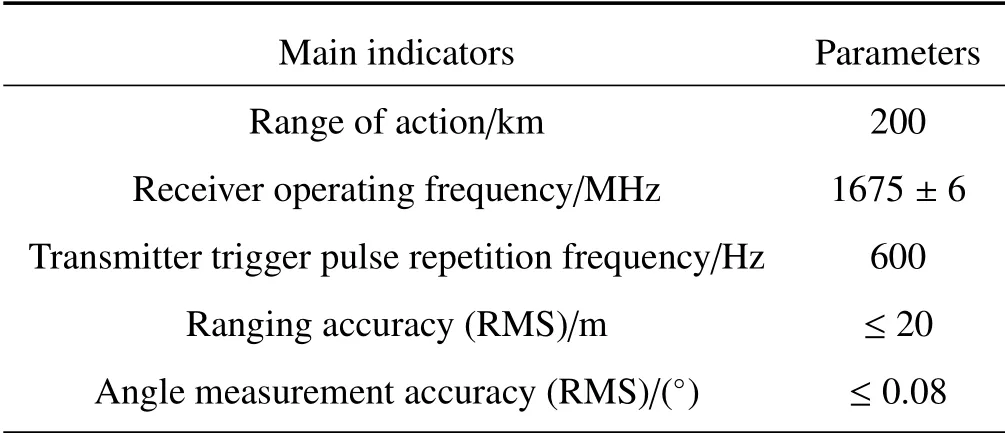
表2 GFE(L)1型L波段探空系统性能参数Table 2 Specifications of GFE(L)1 L-band radiosonde
2 观测数据
2.1 数据选取和匹配方法
采用北京国家基本气象站2020年1月1日–5月31日每天08:00和20:00(文中均为北京时间)的激光雷达和L波段探空的垂直风廓线数据,排除试验期间设备维护和供电故障等时段,二者共同观测138天,获取263条有效对比廓线。
激光雷达和L波段探空因测风原理不同,故二者在取样时间和空间上存在一定差异。文中激光雷达探测获取测站垂直上方的风廓线数据,但L波段探空气球以平均约400m·min-1的速度上升的同时,会随着大气风场发生水平方向的移动,获取的是探空气球实际位移路径上的风廓线数据。文中选取试验期间探空气球在3000m高度、距释放点水平距离小于5000m的风廓线数据。另外,因激光雷达的测风垂直空间分辨率为50m,L波段探空的测风垂直空间分辨率约为6 m,本研究在计入设备所在的本地海拔高度后,结合各设备测风垂直空间分辨率,选取每层高度差不大于5 m的最邻近测风数据进行匹配,最终形成垂直分辨率为50m的测风数据用于对比分析。通过实际数据分析,匹配后的两种测风数据同层高度差小于3 m。
文中比对的风廓线垂直高度不大于3000m,L波段探空在此高度内获取的数据为1 min时长的平均数据。激光雷达约20 s获取一组观测数据,对每分钟内的观测数据进行矢量平均以减少瞬时风的影响。同时,为最大程度上保证数据的完整性,匹配时保留了风向、风速偏差较大的数据。经过上述时空匹配,共获得8491组观测数据。匹配得到的8491组观测数据在距地面垂直高度50~3000m范围内,以50m垂直高度分层。二者在各高度层匹配的数据对数目分布如图1所示,1300m高度内的各层基本匹配了200对数据,其中在200m高度层因探空数据缺失导致匹配数据少于200对;在2000m以上高度,由于激光雷达的观测数据信噪比偏弱,获得的可信数据量少,各高度层匹配的数据均少于100对。
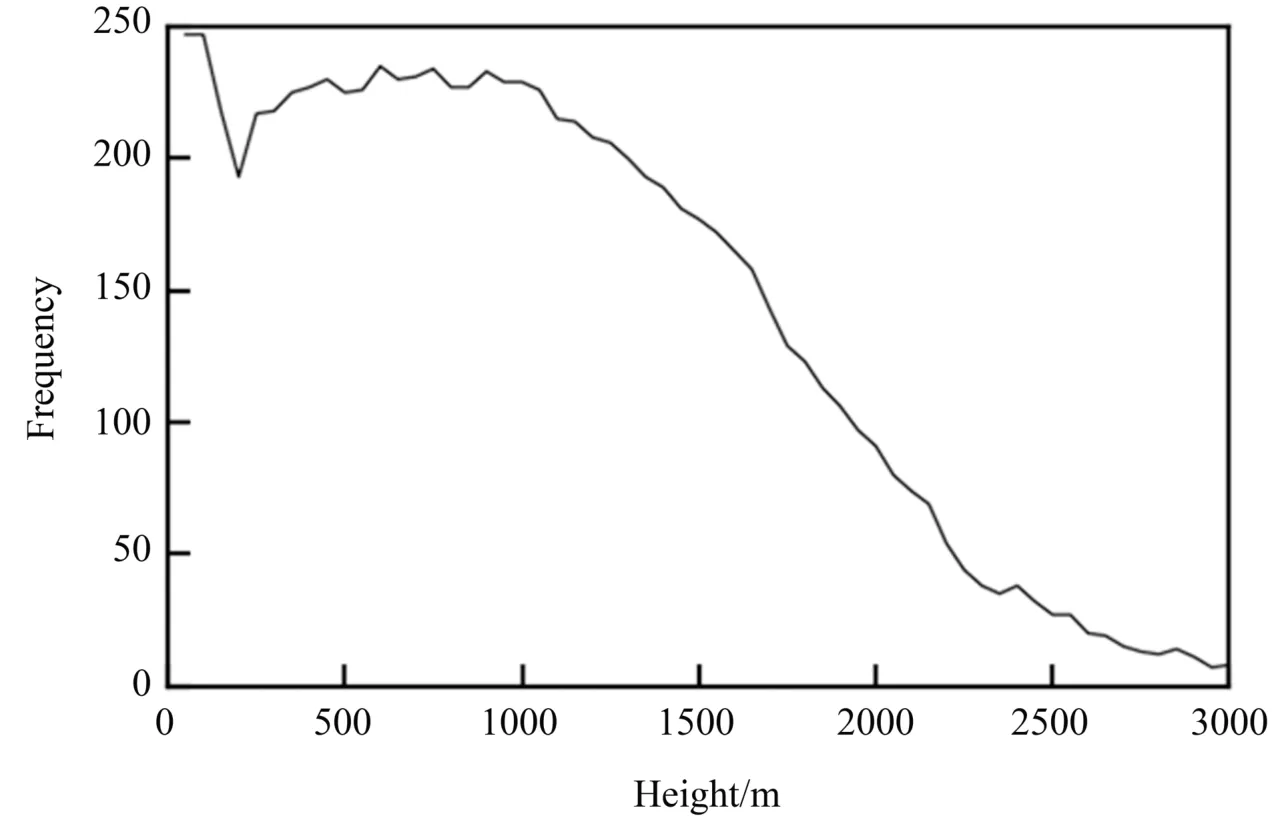
图1 各高度层的匹配数据对的数量分布图Fig.1 Distribution of the number of matching data contained in each level
2.2 比对方法
以L波段探空获取的风廓线数据为对照标准,从设备探测风廓线的高度、风速和风向三个方面分析激光雷达的测风数据质量。其中,对激光雷达与L波段探空各高度层匹配的数据对风速、风向间平均偏差(ME,EM)、平均绝对误差(MAE,EMA)、均方根误差(RMSE,ERMS)以及线性拟合的相关系数R进行计算分析。EM、EMA、ERMS和R的表达式分别为
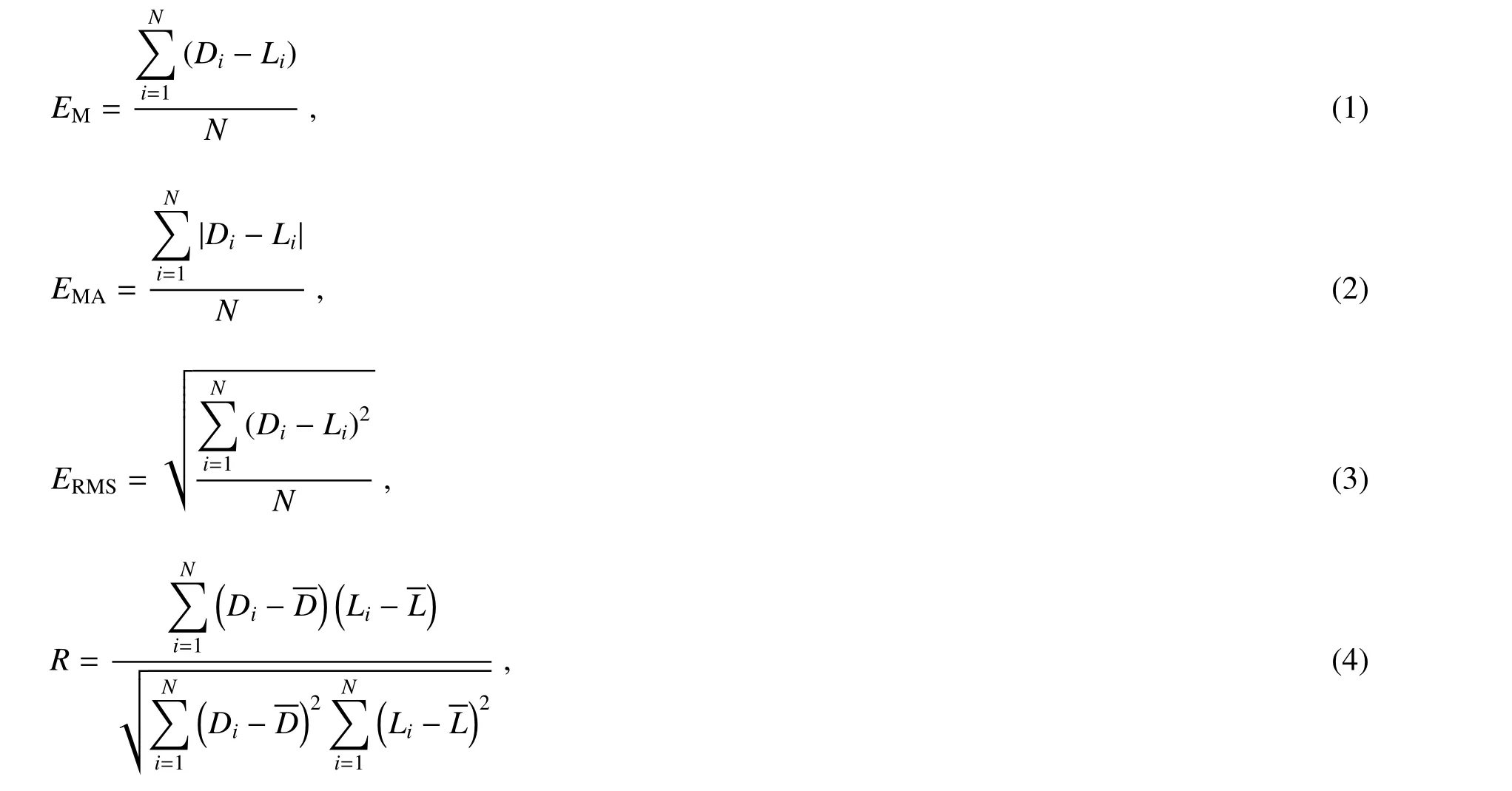
式中Di和Li分别是激光雷达和L波段探空的第i组对比数据,和分别是激光雷达和L波段探空的总体平均值。
由于气象业务上大气水平风向的取值范围为0°~360°,为避免匹配的数据在风向处于接近0°或360°附近时产生虚假的风向差值,在计算位于0°或360°附近的风向差异时进行加或减360°的处理,确保获取二者合理的风向差异。例如,当时空匹配后的激光雷达和L波段探空观测的风向分别是358°和3°,则将L波段探空观测风向处理为363°,以确保二者风向实际差值是|363°-358°|=5°,而不是|358°-3°|=355°。
3 结果分析
3.1 探测高度分析
文中的激光雷达是以气溶胶为探测示踪物的相干多普勒测风激光雷达,在雷达探测区域的大气存在气溶胶的情况下,激光雷达能够获得较好的信噪比,获取高可信度的观测数据。对比试验期间,激光雷达在08:00和20:00最大探测高度平均值分别为1558 m和1967 m,风廓线探测高度在大气边界层高度以下,且20:00最大探测高度平均值大于08:00。文中138天对比观测试验中,激光雷达逐日最高探测高度有8天达到3000m,占全部观测时间的5.8%;78天不低于2000m,占全部观测时间的56.5%;在2月13日、2月29日、3月8日和5月8日出现降雨的4天探测最大高度不足1000m,占比为2.9%。具体结果如图2所示。
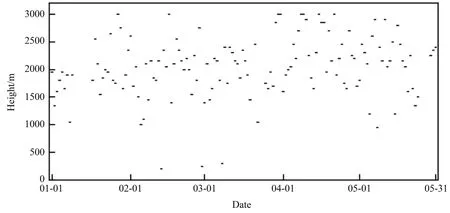
图2 激光雷达逐日探测风廓线的最大高度分布Fig.2 Distribution of daily highest height of the wind profile obtained by DWL
3.2 风速与风向对比
将激光雷达与L波段探空匹配的8491对水平风向、风速数据进行线性拟合,结果如图3所示。风向拟合的相关系数、平均偏差和均方根误差分别为0.965、-1.3°和16.1°,风速拟合的相关系数、平均偏差和均方根误差分别为0.986、0.21m·s-1和1.06m·s-1。各高度层风向线性拟合相关系数均大于0.93,100m高度以上各层风速线性拟合相关系数均大于0.9,具体结果如图4所示。
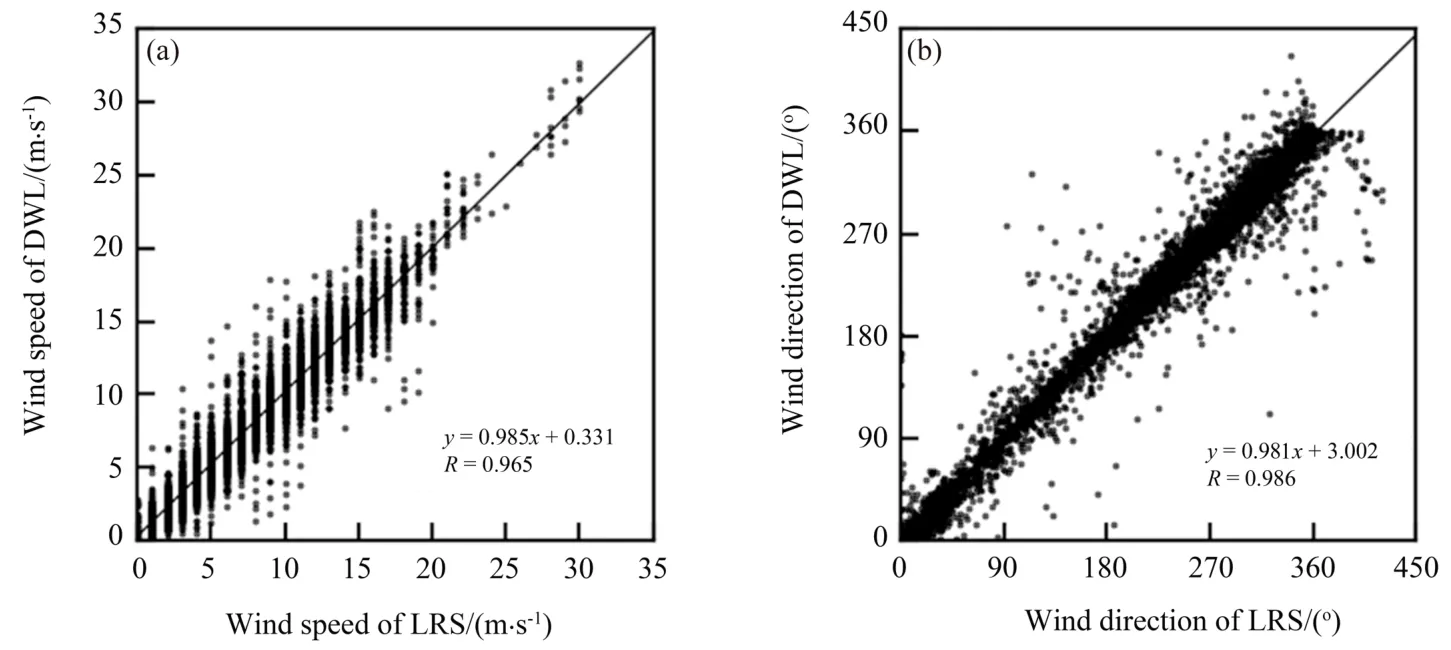
图3 风速(a)、风向(b)散点及线性拟合图Fig.3 Scattered points and linear fitting graph of wind speed(a)and wind direction(b)
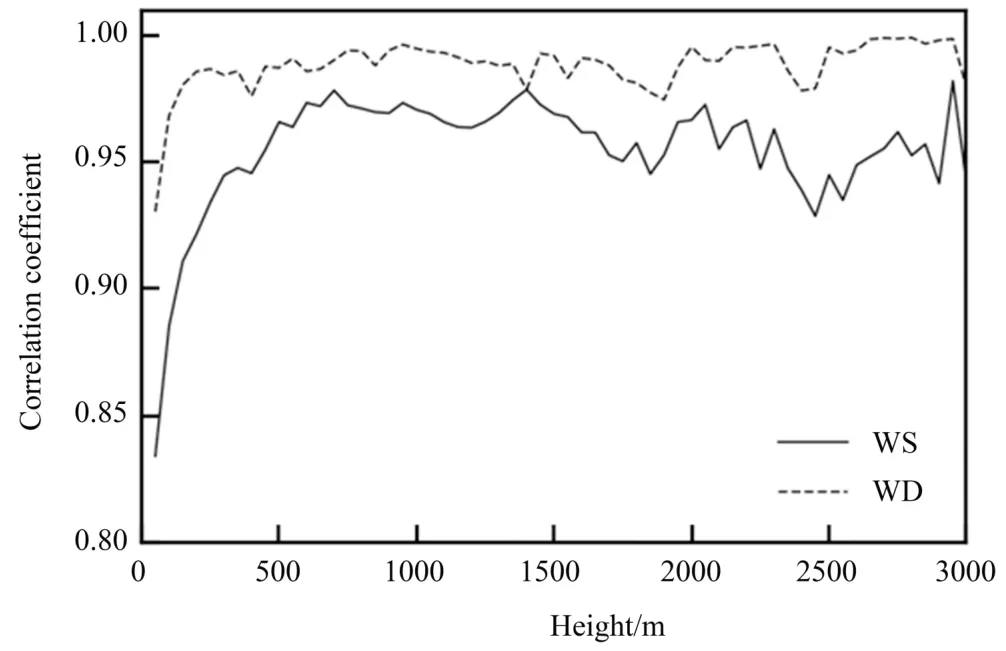
图4 各层高度上风向及风速线性拟合相关系数Fig.4 Linear fitting correlation coefficient of WD and WS at each layer height
二者在50m和100m高度层的风速线性拟合相关系数低于0.9,分别为0.834和0.885。随着高度增加,二者风向、风速线性拟合相关系数较低层有所增大。二者在低层相关系数较小的主要原因可能源于二者探测原理和观测地点因周边建筑和地形产生低层局部环流和湍流等影响。
3.2.1 风速对比分析
计算试验期间激光雷达和L波段探空在各高度层获取的平均风速,以及二者之间的均方根偏差和平均偏差,具体结果如图5所示。在各高度层上的激光雷达平均风速均大于或等于L波段探空平均风速。其中,50m高度层的激光雷达平均风速比L波段探空偏大0.60m·s-1;100~1000m各高度层平均风速差值约为0.1m·s-1;在1000~3000m的各高度层平均风速差值基本呈现随高度递增的趋势,在3000m高度层平均风速达到2.2m·s-1的最大差值。激光雷达和L波段探空探测获取的各高度层平均风速之间的均方根误差和平均偏差也基本呈现出随高度递增的趋势,并且在2350m以上高度层有明显的增大,可能由于该高度区间内的匹配数据样本量较少造成。图6(a)给出的各高度层两者风速差值箱线图也反映出上述变化趋势。
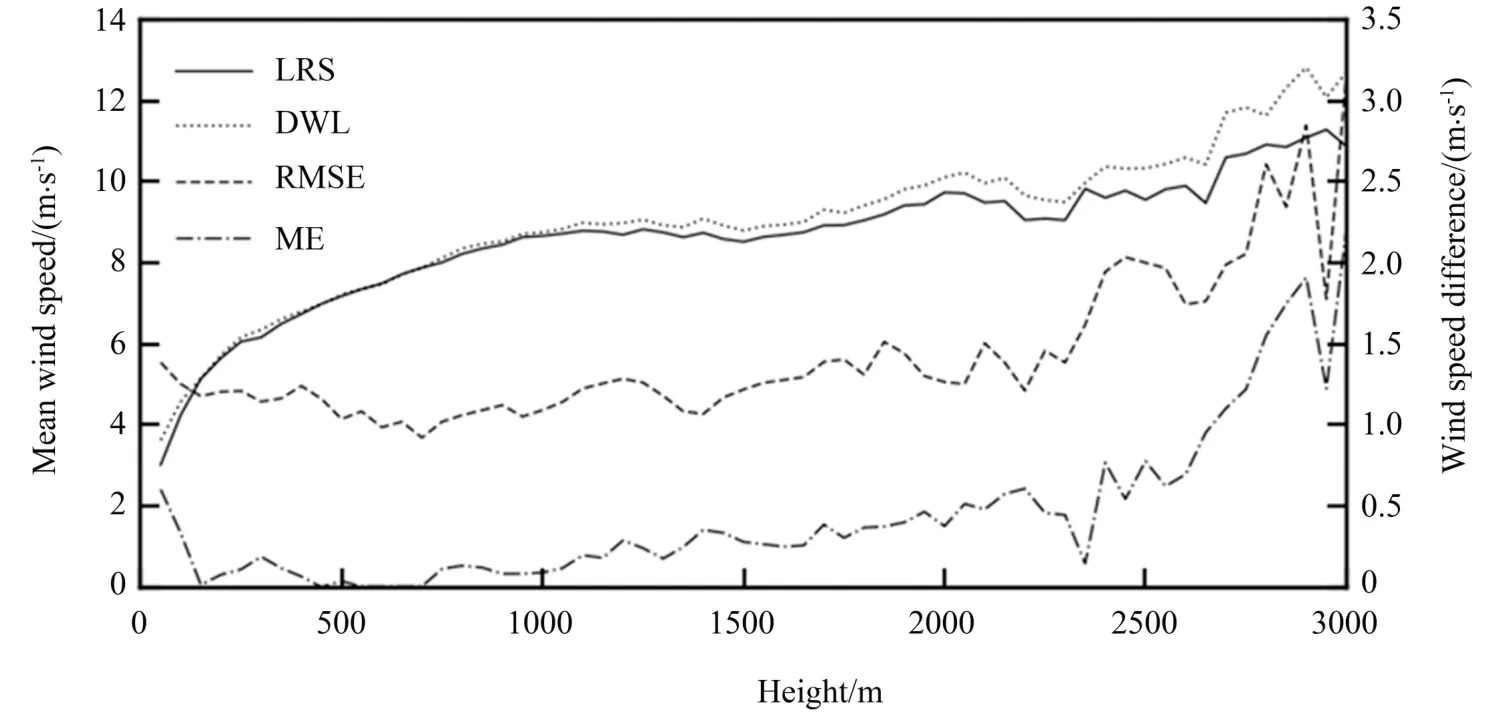
图5 风速及其平均偏差和均方根误差随高度分布Fig.5 Distribution of wind speed and its ME and RMSE with height
在不同风速下,激光雷达与L波段探空观测的风速差异呈现不同特征,具体如图7所示。以L波段探空获取的风速值为参考,风速在6~20m·s-1区间时,二者风速偏差小于或等于0.2m·s-1。特别地,风速在6~10m·s-1范围内的箱体区间较小,表明二者风速偏差更小;风速小于6m·s-1时,激光雷达测风值偏高0.3m·s-1;风速在16~20m·s-1区间时,激光雷达测风值偏低0.2m·s-1;风速大于20m·s-1时,箱体区间大且中值位于零轴以上较多,说明该风速区间内的激光雷达的观测值大于L波段探空的观测值。
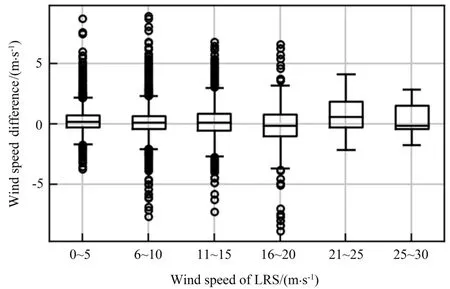
图7 不同风速条件下的风速差异箱线图Fig.7 Box plot of wind speed difference under different wind speed conditions
3.2.2 风向对比分析
由图6(b)给出的各高度层二者风向差值箱线图可知,除2900、2950、3000m三个高度层外,二者在各高度层的平均风向差异均小于5°。从各层箱体分布来看,在50m高度层,差值箱体明显要宽于其他高度层,同时该层的异常值也较多,还存在风向接近反向的观测;随着高度上升,差值箱体更为集中,异常值也较少,同时可以看出较多异常值和风速差值异常值存在较好的对应关系。
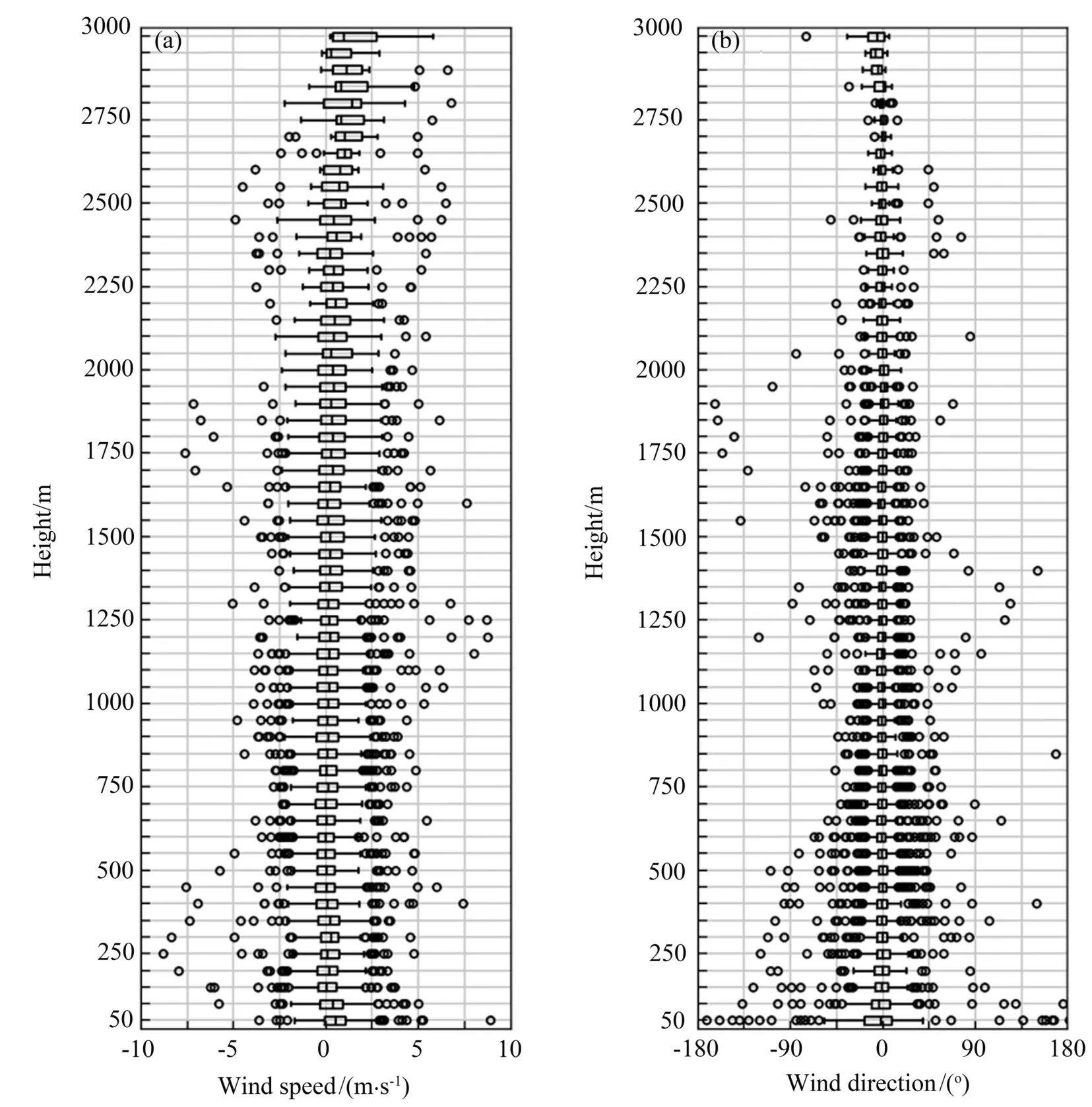
图6 各高度差值箱线图。(a)风速;(b)风向Fig.6 Box plot of difference at each height.(a)Wind speed;(b)wind direction
按照地面气象观测规范中水平风向的16方位划分方法,统计8491对匹配数据的水平风向分布,结果如图8所示。由图可知,二者风向总体分布具有较好的一致性,其中南南西(SSW)风向分布频次差值最大,为0.7%。由各高度层的风向分布频率计算结果(图9)可知,二者在50~100m高度范围内的风向分布频率差异相对明显,其中在50m高度层上L波段探空观测的主要风向为N和SW,占风向总频次的12.1%;激光雷达观测的主要风向为SW,占风向总频次的11.3%,次主要风向为SSW,占风向总频次的10.1%。二者在2000m以上各高度层匹配的数据对较少,导致二者探测的风向分布差异随机误差偏大,使得二者风向差异增大。图10为激光雷达与L波段探空在1000m以下各高度层风向频次差值,低层差值较大。
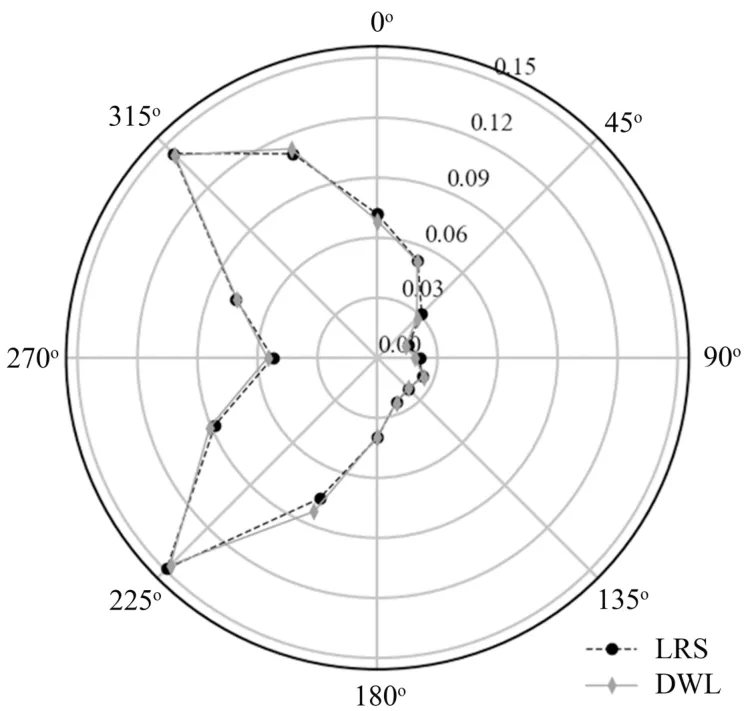
图8 各风向出现的频次占比分布玫瑰图Fig.8 Rose chart of frequency proportion distribution of each wind direction
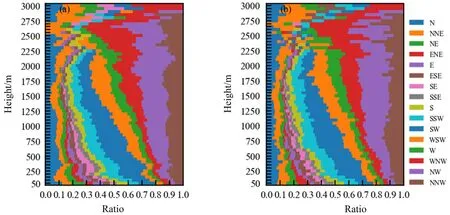
图9 各高度层风向比例分布图.(a)激光雷达;(b)L波段探空Fig.9 Ratio of wind direction at each level.(a)DWL;(b)LRS
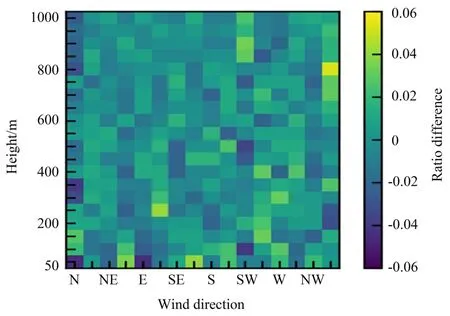
图10 各高度层风向频次占比差值Fig.10 Wind direction frequency proportion difference at each level
3.3 典型个例差异分析
试验期间,激光雷达和L波段探空观测的风向、风速整体呈现出较好的一致性,但在500m以下高度层上存在较大差异,其中4月8日和5月11日两天的差异尤为明显,二者在50m高度层风向最大差值分别为154°和147°。随着高度增大,二者风向逐渐趋于一致,在1000m以上的各高度层风向差值基本小于15°,个别高度层风向差值小于1°。
4月8日20:00比对结果如图11(a)所示,400m以下各高度层的激光雷达观测风速值均小于L波段探空;400m及以上各高度层的激光雷达观测风速值总体均大于或等于L波段探空。400~1650m各高度层风速具有较好一致性,各高度层风速差值基本小于1.0m·s-1;1700~1950m、2400~3000m各高度层二者风速值及其差值均呈增大趋势,且激光雷达观测风速值的增幅大于L波段探空。
5月11日20:00比对结果如图11(b)所示,700m以下各高度层的激光雷达观测风速值均小于L波段探空;700m及以上各高度层(除1950m高度层)的激光雷达观测风速值均大于L波段探空风,且L波段探空风速观测值波动较激光雷达更为显著。
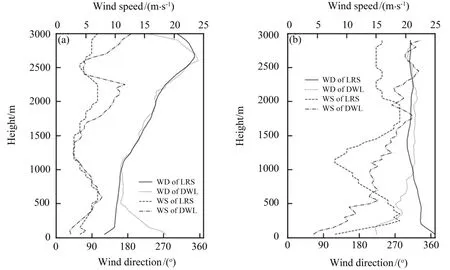
图11 L波段探空和激光雷达观测风廓线图。(a)4月8日;(b)5月11日Fig.11 Wind profile observed by LRS and DWL.(a)April 8th;(b)May 11th
总体而言,500m以下各高度层的风向偏差较大,该结果与风廓线和L波段探空相关研究指出的1000m以下低空大气风的不均匀性增强造成风向误差较大[3]一致;另外,二者的测量位置和原理差异也有可能导致500m以下各高度层的风向出现较大偏差。激光雷达与测风塔的风速计对比相关研究指出二者在低层的风向具有较好一致性[14-16];另外,较激光雷达探测脉冲具有稳定的指向性而言,L波段探空在近地面高度存在强风的情况下,探空球下方悬挂的探空仪会在探空球释放初始阶段存在显著的摆动,并不是完全跟随探空气球的方向移动,这也可能是导致二者在低层的风向存在较大偏差的原因之一。
4 结论
以GFE(L)1型L波段探空系统观测获取的50~3000m高度内各高度层风速、风向廓线数据为参考标准,利用138天有效观测试验期间匹配的8491对观测数据,从设备测风高度、风向和风速差异三个方面比对分析了WINDCUBE 100S扫描式相干多普勒测风激光雷达的探测性能,结论如下:
1)对比试验期间,激光雷达08:00和20:00最高探测高度平值分别为1558 m和1967 m。逐日最高探测高度有8天达到3000m,占全部观测时间的5.8%;78天达到2000m,占全部观测时间的56.5%;有4天不足1000m,占全部观测时间的2.9%。
2)对比试验期间,激光雷达在匹配的各高度层的平均风速均大于或等于L波段探空观测值。二者在1000~3000m各高度层的平均风速差值、均方根误差和平均偏差基本呈现随高度递增的趋势,平均风速差值在3000m高度层达到2.2m·s-1的最大值。另外,在不同风速情况下,激光雷达与L波段探空观测的风速差异呈现不同特征。风速在6~20m·s-1时,二者风速偏差不大于0.2m·s-1;风速大于20m·s-1时,激光雷达测风值较L波段探空观测值偏高。
3)按照十六方位风向分布频率统计,对比试验期间激光雷达与L波段探空观测的整体风向具有较好的一致性,但50~100m低层和2000m以上各高度层的风向分布频率差异较中间高度层有所增大。
猜你喜欢
学苑创造·C版(2023年5期)2023-06-04 09:40:56
农业灾害研究(2022年8期)2022-10-01 08:26:02
成都信息工程大学学报(2021年5期)2021-12-30 06:25:08
成都信息工程大学学报(2021年3期)2021-11-22 07:17:40
成都信息工程大学学报(2018年4期)2019-01-23 06:57:12
重庆交通大学学报(自然科学版)(2018年8期)2018-07-30 10:12:22
高原山地气象研究(2016年1期)2016-11-10 06:06:06
中国民航大学学报(2014年5期)2014-03-14 03:36:30
河南科技(2014年14期)2014-02-27 14:12:08
河南科技(2014年4期)2014-02-27 14:06:59