无人机自组网路由协议研究综述
2022-10-13 08:40冯斯梦吴启晖QUEK
数据采集与处理 2022年5期
张 珉,董 超,杨 朋,冯斯梦,吴启晖,QUEK Q S T
(1.南京航空航天大学电磁频谱空间认知动态系统工业和信息化部重点实验室,南京 211106;2.南京邮电大学物联网学院,南京 210023;3.北京航空航天大学电子信息工程学院,北京 100191;4.新加坡科技设计大学信息系统技术与设计学院,樟宜 487372)
引 言
近年来,得益于电子技术、传感器和通信技术的快速发展,无人机(Unmanned aerial vehicle,UAV)已经在军民领域都获得了大量应用。单个无人机集群自组织形成的无人机自组网(Flying Ad-Hoc networks,FANETs)能够灵活高效且低成本地完成诸多任务,例如灾后救援、军事通信和农业生产等[1-2]。然而,由于无人机自组网高度的动态性和移动性,导致无人机之间的连接多变且脆弱,因此无人机之间的通信时常丢失,这为无人机自组网的数据包传输带来了极大的挑战。路由协议是一种指定封包转发和路径选择的网络协定,通过一定的算法计算出一条适合传输的路径连接源节点和目的节点,使得数据包可以成功传输。路由协议是无人机自组织网络的服务质量(Quality of service,QoS)最直接的体现之一[3],近年来吸引了诸多学者的研究和注意。无人机自组网的是一种特殊的移动自组织网络(Mobile Ad-Hoc networks,MANETs),也和车辆自组织网络(Vehicular Ad-Hoc networks,VANTEs)[4]有诸多相似之处,例如移动性、分布式、动态性和自组织性。然而,无人机自组织网有着明显区别于MANETs和VANTEs的自身特点[5],具体表现在:
(1)移动性高。无人机自组网的节点是在空中自由飞行无人机,有最高460 km/h的飞行速度[5],而MANETs和VANTEs的节点一般是在地面移动的行人或者汽车,速度较慢。
(2)动态性高。由于具有较高的移动性,无人机自组网的拓扑变化通常十分剧烈,具有很强的动态性,静态的通信协议通常难以高效发挥作用。
(3)连接需求高。无人机自组网优于部署在空中,通常缺乏被良好覆盖的基站或者路边单元,因此无人机之间的连接需求高,否则会有失联的风险。
(4)链路长。无人机之间的距离通常要大于MANETs和VANTEs,为了建立无人机之间的通信链路,通信距离也必须大。这种现象会影响无线链路、硬件电路和物理层的行为。
(5)节点差别大。无人机自组网通常会部署不一样的传感器,执行不同的任务,例如摄像、采集和农业生产等。不同于MANETs和VANTEs单一的节点功能,因此无人机自组网可能会有多层次的网络需求。
因此无人机自组网由于其高度的移动性和动态性,给执行任务带来了灵活性和多样性,但也造成了链路的脆弱和不稳定[6-7],这为路由协议的设计带来了困难和挑战。和传统网络一样,无人机自组网中的节点都会有一个唯一地址,路由的目的就是产生数据包的时候确定到达目的地址的路径,无线网络中通常是逐跳的路径[8-9]。例如主动式路由会对每一个目的地,按照最短路径算法动态生成一个路由条目,放入到一个表中称为路由表,当有数据包需要传输时查表便可获得路径[10]。除此之外还有被动式[11]、混合式[12]等基于拓扑式的路由协议;以及基于地理的路由协议,包括基于位置的路由协议[13]和基于存储-携带-转发(Store-carry-forwarding,SCF)[14]等;基于分层的路由协议包括基于软件定义网络(Software defined network,SDN)的路由协议[15]和基于分簇(Clustering)[16]的路由协议等。不同的路由协议被开发者研究出来适用不同的场景以实现最大的实际效用。
1 无人机自组网的结构分析
常见的无人机大致可分为固定翼和旋翼的两大类[17]。固定翼无人机具有高速和重载荷,但必须保持连续前进运动以保持高空,因此不适合静止应用,如巡航监视工作。旋翼无人机的移动性和有效载荷有限,能够移动在任何方向以及保持静止在空中。因此,无人机的类型选择主要取决于具体应用需求。无人机还可以根据它们可以旅行的范围(近程、近程和中程)、它们在空中的耐力大小(小和大),以及用途(竞赛无人机、特技无人机、直升机无人机、投递无人机、摄影无人机、GPS无人机和垂直起降无人机)进行分类[18]。
然而小型无人机的质量和动力通常非常小,这严重地限制了它们扩展和协作的能力。得益于近年来无人机制造成本的降低、执行任务的高效率、高可扩展性和高生存性,大多数民用和军事的应用都可以高效地使用多小型无人机系统来执行任务,越来越多的研究者开始研究无人机自组网通信方法。FANET是由一组无人机组成的自组织网络结构,多无人机合作组成网络,至少由一架无人机与地面站或卫星相连,可以合作执行救灾、农业生产和紧急通信等任务[18-19]。无人机自组网通信体系结构指定了决定信息如何在基站和多架无人机之间或无人机之间流动的规则和机制。常见的无人机网络的4种基本通信架构,即无人机直连通信、无人机卫星网络通信、无人机蜂窝网络通信和无人机自组网通信[18]。无人机可通过中继转发和基站的通信、传输命令和上传数据等操作[20]。如图1中,一个典型的无人机自组网执行震后救灾的示意图,左侧是一个基站,右侧的无人机上传灾区的通信数据给基站的时候会通过中继转发来实现,灾区的无人机由于地震受损有大量的数据需要转发给基站,数据需求很大,而左侧的无人机由于靠近完好的基站,通信便利,数据需求不高。因此本无人机自组网路由可能会选择一条数据需求不高的路径实现较好的中继转发[8]。
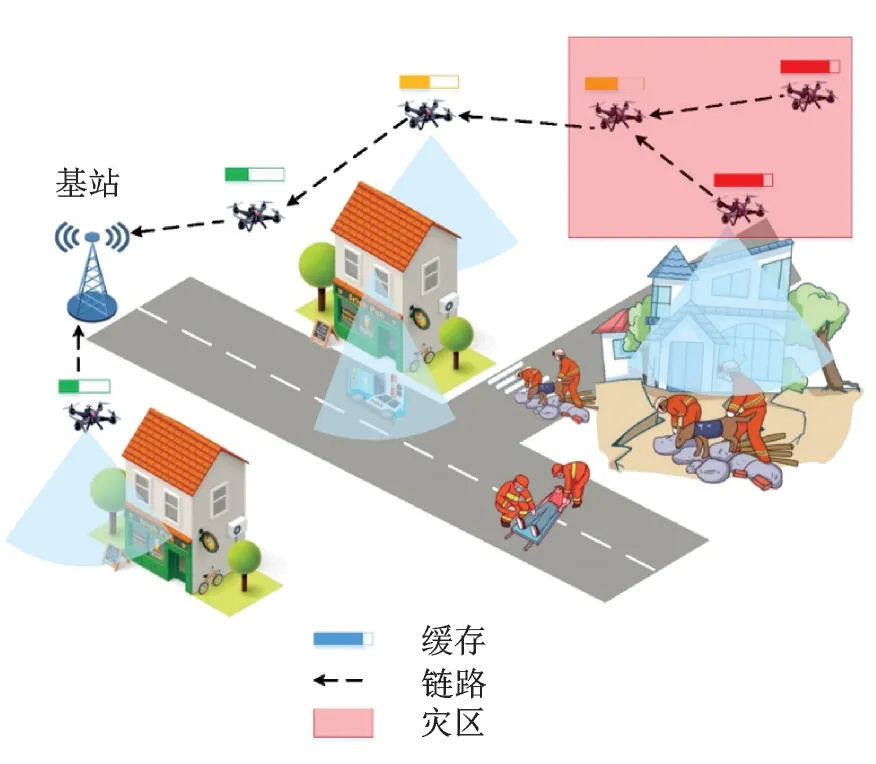
图1 无人机自组网典型应用场景图Fig.1 Typical application scenario of FANETs
在无人机自组网体系结构中,无人机以不同于传统MANETs的方式实现实时通信,可以降低对基础设施的需求和解决通信距离的限制。典型的无人机自组网的通信结构如图2所示。在无人机自组网架构中,所有无人机相互之间和基站都是自主连接的,而不需要预先设置通信,并且每个无人机都可能执行数据的转发任务。簇头无人机(Cluster head UAVs,CHUs)常常扮演骨干无人机的角色,是簇成员无人机(Cluster member UAVs,CMUs)和簇头无人机之间的网关。这样只有CHUs和基站链接的结构,可以节省成本并且大大扩展网络的通信范围。一个簇头的形成一般需要簇内无人机离得较近且具有类似的移动方向和速度,反之则需要形成另一个簇。例如图2中,相近的无人机组成了一个簇,通过CHUs和位于基站的中央控制器(Centralized controller,CC)[15]进行通信。高耗能和高运算能力的模块会部署在CC或者CHUs中,执行大运算的决策并减小CMUs的运算压力。常见的无人机自组织网络常常需要部署在基站或者卫星的中央控制器,负责控制和分配资源以及执行大规模计算任务等。簇头无人机常常被诸多研究者部署移动边缘计算(Mobile edge computing,MEC)[21]节点,用于辅助簇成员无人机进行计算任务,簇成员无人机可以选择在本地计算,也可以卸载到MEC节点进行计算。簇成员无人机可以覆盖地面移动用户、车辆或物联网节点等,能够互相发送指令、交流交通和流量等态势、分享情报等。中央控制器也可与通信卫星相连接,组成空天地一体的通信网络,可以扩展网络维度和提高网路韧性。

图2 典型无人机自组网通信架构Fig.2 Typical communication architecture of FANETs
2 面向无人机自组网的路由协议
无人机在FANETs中的高度动态特性使得网络拓扑剧烈变化,使得无人机之间的路由变得关键。这使得高效端到端的传输和低开销的路由成为最近无人机自组网研究的热点。然而如何设计符合无人机自组网场景和特点的路由协议仍然是一个主要挑战,而最初的研究中往往首选移动自组网和车辆自组网中的协议,由于无人机自组网的三维空间内的特点使得普通的移动自组网和车辆自组网中的路由协议不能直接部署,这些协议们必须要重新设计以适应特点[22]。
2.1 常见评价指标
无人机自组网路由研究常用评价QoS包括有效吞吐量(Goodput)、时延(Delay)和分组递交率(Packet delivery ratio,PDR)等,分别从总量、效率和可靠性角度对路由协议进行评价[23]。其中,由于无人机自组网因为通信造成的耗能远远小于飞行耗能,所以无人机自组网可以增加无人机之间的控制信号交流,来提高路由协议的性能。同时,重复传输的服务信号数据包也要排除在有效吞吐量之外。所以采用有效吞吐量可以排除控制信号的数据包对服务信号的数据包的评估影响,表达如下

式中:pa为所有的数据包;pc为所有的控制数据包;pr为重传数据包;T为网络运行的总时间。递交率可以表示为

式中:na为数据包的总数量;nl为丢失的数据包的数量。时延一般为每个数据包的平均时延,写作

式中di为每个数据包的时延。横坐标参考变量可以从另一个方面反应各个评价指标的性能。常用的横坐标变量包括无人机节点个数、覆盖面积、无人机平均速度和无人机节点流量等[24]。
2.2 无人机自组网路由协议分类研究
按照移动自组网传统的路由协议的研究,常见的路由协议分为主动式,又称先应式[10,25]、被动式,又称反应式[11,26]和混合式[12,27]路由协议。其中主动式路由协议的节点一般要维持到各个节点的路由表,被动式则按需计算路径,不需要维持路由表,混合式则兼顾两者的决策方法。但无论主动式还是被动式路由,决策的依据一般基于网络拓扑结构,例如连接性和跳数等。
由于无人机自组网高度的动态性以及快速变化的拓扑的影响,尤其是在多规模节点的网络中,无论主动式、被动式还是混合式的基于拓扑的路由协议都难以满足高服务质量的路由需求。基于地理的路由协议通过使用额外的信息消除了基于拓扑的路由的一些限制,通常要求有关中继节点的物理位置的信息是可获得的。一般情况下,每个节点通过使用卫星导航系统(Global navigation satellite system,GNSS)或其他类型的定位服务来确定自己的位置[28]。基于地理的路由协议中能较好克服移动性带来的影响的是基于SCF[14,29-30]的路由协议,设置专门的摆渡无人机负责收集和传输信息并传输给目的节点。同时,平面式的路由架构越来越难以满足数据传输和组织编队的需求,越来越多的研究者关注分层(Hierarchical)路由协议,在分层路由协议中,选择主动路由和被动路由的能力依赖于无人机所在网络的分层级别。这种特定的路由主要由一些主动的计划路由决定,然后通过底层的响应协议帮助触发节点的请求。因此,按照路由的决策过程,将现有的面向无人机自组网的路由协议分为基于拓扑、基于地理信息和基于分层的路由协议,具体如表1~3所示。
表1将常见的基于拓扑的路由协议分为:

表1 常见的基于拓扑的路由协议特征Table 1 Typical communication architecture of FANETs
(1)主动式。主动式会主动构建路由表,主要包括优化链路状态路由协议(Optimized link state routing,OLSR)[10,24,31-32]和序列目的节点距离矢量路由协议(Destination-sequenced distance vector,DSDV)[25,33]等,以及各种优化版本,例如EE-hello(Energy efficient-hello)[34]致力于能量效用的路由决策和M-OLSR(Modified OLSR)[35]致力于多维度的Hello和TC设计。
(2)被动式。被动式会根据需求探测路由路线,主要包括动态源路由(Dynamic source routing,DSR)[26,33]和按需平面距离向量路由协议(Ad-Hoc on-demand distance vector routing,AODV)[11,33]等,以及各种优化版本,例如:CHNN-DSR(Continuous hopfield neural network DSR,CHNN-DSR)[36-37]采用连续Hopfield神经网络对路径进行优化以适应FANET节点的高速运动;M-AODV(Modified-AODV)[38]考虑了QoS参数和不同的约束条件以及移动性;EM-AODV[39]的决策考虑更多稳定性、可用带宽和电量等。
(3)混合式。混合式会兼具主动与被动的方法,主要包括临时序列路由算法(Temporally ordered routing algorithm,TORA)[12,40]和区域路由协议(Zone routing protocol,ZRP)[27,41]等。其他的版本例如灵敏混合自适应路由协议(Sharp hybrid adaptive routing protocol,SHARP)[42]通过调整路由信息的主动传播程度和需要被动发现的程度,自动找到主动路由和被动路由之间的平衡点等。
因此,基于拓扑的路由协议常常不能克服动态的拓扑结构带来的路由失败,包括丢包、路径失效和没有前向节点等。因此在固定编队的无人机自组网中采用基于拓扑的路由协议常常能取得较好的效果和较少的资源消耗。
由于现在的无人机常常配备了卫星导航系统(Global navigation satellite system,GNSS)[5],甚至陀螺仪和加速计等装备,可以具有较好的定位性能。并且,随着电池技术的发展和进步,电池容量逐渐提高,这就凸显着由于路由开销带来的能量消耗远远小于飞行消耗,因此可以增加无人机之间互相通信的频率和广度[8]。因此研究者提出了诸多基于地理的路由协议(Geography-based routing)[28],表2中将常见的基于地理的路由协议分为:
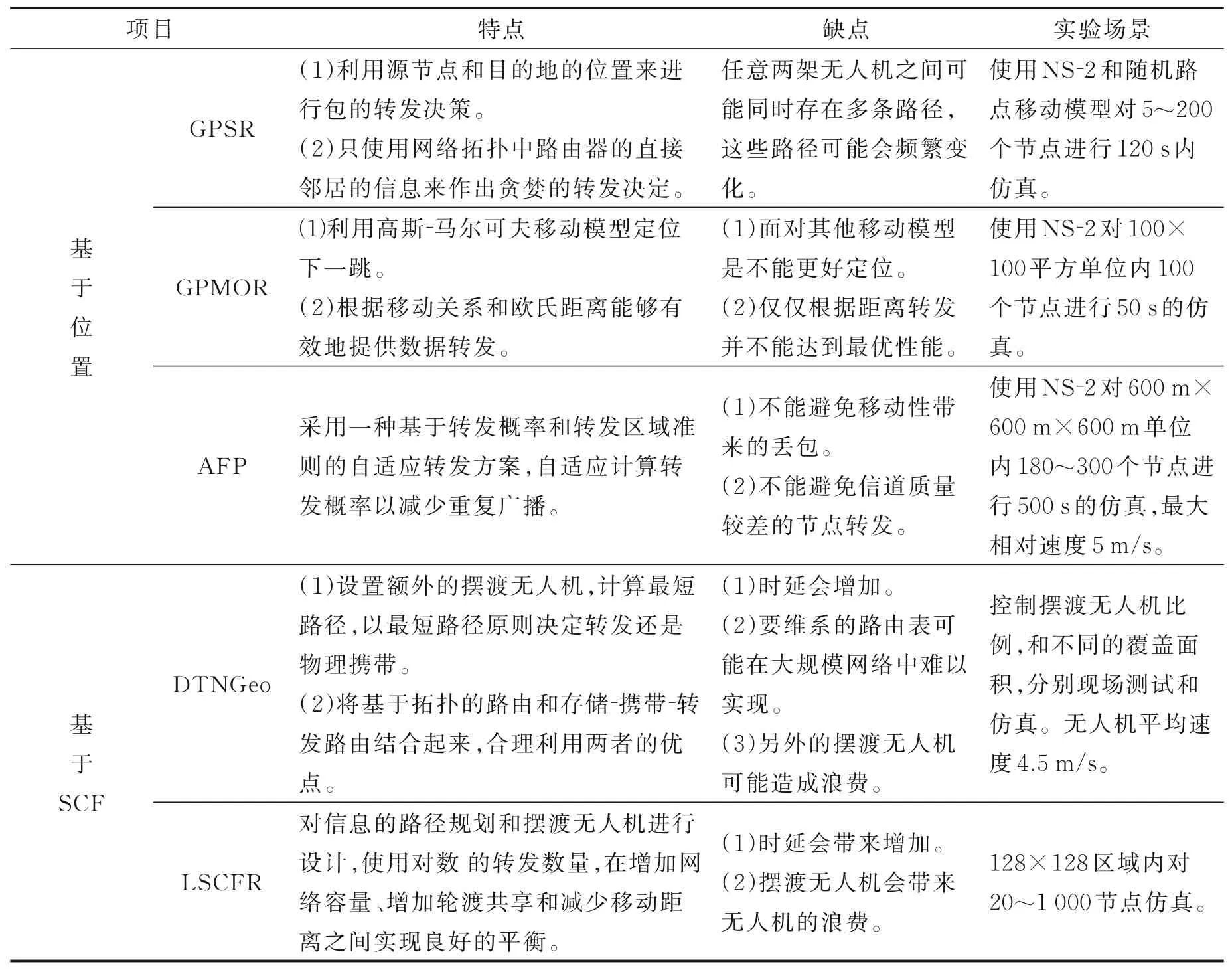
表2 常见的基于地理的路由协议特征Table 2 Typical geographic-based routing protocol features
(1)基于定位的路由协议,主要包括贪婪周边无状态路由(Greedy perimeter stateless routing,GPSR)[43]、地理位置移动性导向路由(Geographical position mobility-oriented routing,GPMOR)[13]和自适应转发协议(Adaptive forwarding protocol,AFP)[44]等,以及各种类似协议例如基于地理路线的移动预测(Mobility prediction based geographic routing,MPGR)[45]推导了无人机运动概率密度函数的高斯分布,以减小高移动性的影响,提出了两跳边界转发,以减少路由空洞的影响。地理负载共享路由(Geographic load share routing,GLSR)[46]提出了一种地理负载分担路由来缓解网络中的拥塞。
(2)基于SCF的路由协议。由于无人机的自主移动性机制,研究者提出的很多基于SCF的路由协议可以自主地移动完成数据包的发送[47],例如延迟容忍网络地理协议(Delay tolerant network geographic,DTNGeo)[14]和对数存储携带转发路由(Logarithmic store carry forwarding routing,LSCFR)[29]等,以及各种类似协议例如位置辅助的时延容忍路由(Location-aided delay toler ant routing,LADTR)[48]预测目标无人机节点的位置然后决定向何处转发和机会时延容忍网络的位置感知路由协议(Location aware routing for opportunistic delay-tolerant networks,LAROD)[49]优先执行贪婪转发,没有进展的情况下会临时存储数据包等。

续表
基于地理的路由协议可以较好地克服移动性带来的路由失效,甚至可以获得较高的可靠性,但可能会造成大的时延[28]。因此近年来也有借助深度神经网络(Deep nural networks,DNN)在历史飞行数据的基础上规划路由的方法,例如帕累托优化多目标路由(Pareto-optimal multiobjective routing,POMOR)[50],设计了一个DNN,将转发节点观察到的本地地理信息映射为确定最优下一跳所需的信息,其中DNN是通过从历史飞行数据中挖掘商业客机的定期移动模式来训练的。训练后的DNN存储在每架飞机上,仅依靠当地的地理信息来帮助它们在飞行过程中做出路线决策。此外,POMOR将路由算法扩展到多目标场景,其目标是同时最小化延迟,最大化路径容量和最大化路径寿命,避免了单一目标优化的不足。由多目标路由距离来说,使用如图3所示的DNN架构,输入为
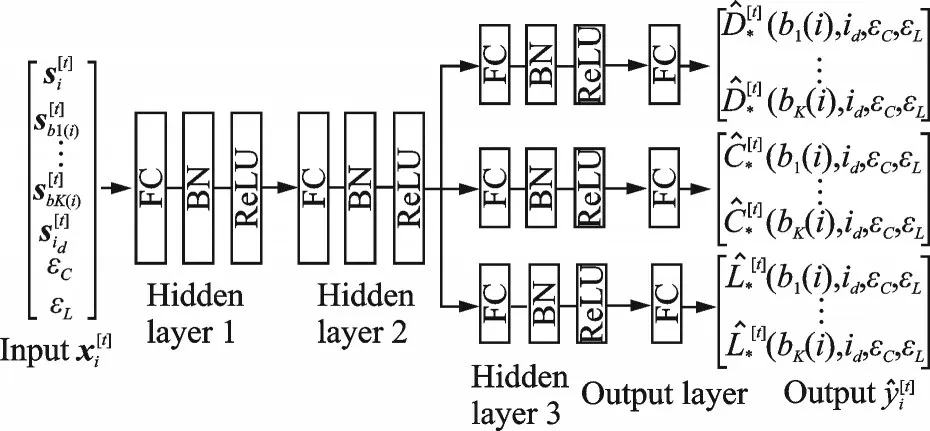
图3 POMOR的DNN架构Fig.3 DNN architecture of POMOR


式中:D、C和L分别代表时延、路径容量和持续时间。之后基于输出使用Pareto优化作出决策,仿真表面其输出的路由决策很接近最优决策。使用DNN和多目标决策的方法在理论和实际上都验证了有效性,这可以为研究者未来提供更多的思路,例如强化学习、循环神经网络等预测数据,为决策提供基础,之后使用多目标优化决策,例如ϵ-约束方法、多目标粒子群等。随着网络分簇方法和移动边缘计算的发展,基于分层的路由协议(Hierarchy-based routing)逐渐吸引了研究者的注意[9]。表3中,常见的基于分层的路由协议可以分为:

表3 常见的基于分层的路由协议特征Table 3 Typical hierarchal routing protocol features
(1)基于软件定义网络的(Software defined network,SDN)路由协议可以借助很多机器学习的方法实现最优化或次优化的路由决策,包括强化学习(Reinforcement learning,RL)路由[51],方向粒子群优化(Directional particle swarming optimization,DPSO)路由[52],时延最小化(Delay minimized,DM)路由[15]。除此之外还有诸如基于SDN改进的仿真退火(Modified simulated annealing,MSA)[53];无人机自组网软件定义网络路由框架(Adaptive SDN routing framework for FANET,ASR-FANET)[54]周期性地收集网络拓扑信息,采集无线网络连接状态和飞行统计信息,基于链路代价计算最优路径等。
(2)基于分簇的路由协议(Clustering-based routing),常见的包括移动预测分簇路由(Mobility prediction clustering routing,MPCR)[55]和优化最短路径路由(Optimal shortest path,OSP)[16]。除此之外还有诸如基于分簇的位置辅助的动态源路由(Cluster-based location-aided dynamic source routing,CBLADSR)[56]采用节点权重启发式算法选出簇头并形成簇,路由过程采用簇内路由和簇间路由相结合的方法,分别采用短程传输和远程传输;基于能量感知链的协议(Energy aware link-based clustering,EALC)[57]使用基于K-means密度分簇算法来选择簇头,可以提高簇的生存期并且降低路由开销等。
基于分层的路由协议可以较好地克服无人机自组网的拓扑和移动的不确定性,但可能会使得SDN中心控制器或者簇头节点非常重要,他们的失效可能造成整个网络的瘫痪或者效率低下[58]。
在决策方法上,有的是基于指标,有的是基于多目标优化,有的是基于强化学习的动作,有的是基于最短路径。文献[59]中则提出了一种归一化熵决策的方法,首先将各个决策因子归一化

式中X为网络指标的值,然后发送节点计算第j个网络度量的熵,即

式中Fij是与转发候选节点ni相关联的第j个网络度量的比例,表示为

基于熵[59]的概念,可以将第j个网络矩阵Υj的熵权定义为

因此,可以根据网络指标的归一化值和网络指标的熵权,计算出转发候选节点ni的转发可用性表示为

最后,可得转发候选节点ni的转发概率为

最终,数据包发送方根据计算出的每个转发候选节点的转发概率,选择转发节点,然后发送数据包。该方法可以为未来的多维路由决策提供全新思路。无人机自组网路由协议的分类研究有其他的不同角度,但基本都有些区别和交叉[60]。例如,可以分为基于网络架构的路由协议以及基于数据转发的路由协议。基于网络架构的路由分为3个不同的子类,即基于拓扑、基于位置和分层路由协议。基于拓扑的路由包含基于网状、基于树和混合3种类型的路由。基于树的路由可以进一步分为基于源根的路由和基于核根的路由。源根树路由是组播路由协议,源节点是组播树的根,维护树的构建和分发。而核根树路由中,核心是具有特殊功能的节点,如组播数据分发和成员管理等。
3 典型路由协议性能对比
基于以上的未来研究方向,本文着重介绍了DPSO[52],较好地结合了基于扩展卡尔曼滤波的位置预测和基于粒子群优化的快速决策方法,并与基于地理和基于分层的两大类典型的路由协议进行了性能对比,希望能对读者有更多的启发。本文对DPSO加入了等待时间限制,即10 s内发送节点如果没收到确认发送成功(ACK)的包,即认为发送失败,启动重传,这样避免了发送节点的无限制等待,能较好地反映出协议性能,本文称之为实用集群优化路由(Practical swarming optimization routing,PSOR)。同样,其他的对比协议也加入这样的10 s机制。
3.1 PSOR
PSOR是一个克服动态性和移动性的较好路由,为无人机自组网路由协议提供了一个新的思路,借用了SDN平台对无人机的移动进行了扩展卡尔曼滤波器(Extended Kalman filter,EKF)估计和预测,可以为后面的研究提供一些思路。
3.1.1 位置预测
高移动性是无人机自组网拓扑不断变化的关键原因,这使得无人机的端到端连接的维持非常具有挑战性。然而,无人机的移动性估计和预测可以解决上述挑战,并且在此基础上提供更好的路由规划。本节提出一种基于移动预测的无人机自组网中可靠路由。此架构应用EKF来准确估计和预测无人机的移动性。然后将基于SDN的异构无人机自组网的路由问题表述为图决策问题,进一步提出了一种粒子群优化(Particle swarm optimization,PSO)方法来解决该问题。整个路由过程称为PSOR路由,PSOR借助了无人机自组网的前沿SDN、EKF和粒子群决策等方法,取得了较好的路由效果。
当前,由于电子科技的发展,设备倾向于高密度和轻量化,无人机一般会部署三维加速度计、陀螺仪和全球卫星导航系统等设备,这就为部署扩展卡尔曼滤波提供了条件,同时也让无人机具备了估计实时位置和预测未来位置的能力,为基于精准位置的路由决策提供了基础。如果无人机部署[52,61]在3-D坐标中可以将无人机定义为一个状态为nx的空间点[62],时间变化量为时隙k,测量值为ny,则移动模型的更新过程为

式中测量向量yˉk=yk-hk(xk|(k-1))+Hk xk|(k-1)。令Γ=Fk(xk|k)使得描述更简洁,并且xk代表无人机k时隙位置状态,表示为


式(15,16)分别为当前无人机的位置状态估计和无人机位置状态的一步预测,其中,Kk为增益矩阵,Pk为误差变量矩阵,Qk为处理噪声协方差,Rk为观察噪声协方差,更多细节可查阅文献[62]。显然经过本卡尔曼系统可以获得无人机的位置估计xk|k和预计x(k+1)|k。
3.1.2 路由决策
将路由决策问题建模为图G(V,E),其中V为无人机节点,E为无人机直接的连接,则明显基于图G(V,E)的路由决策问题是NP难问题(Non-deterministic Polynomial-time hardness,NP-hard)[64]。路由决策时逐个无人机连接的检索尤其是在大规模无人机自组网中十分耗时,因此必须引用一个快捷的路由决策方式。PSO是一种基于种群的优化技术,已经成功应用到很多领域。SDN的网络架构可以为PSO的部署提供网络基础。接下来将从粒子的产生、更新来阐述如何从粒子的移动过程中获得路由决策的过程。
3.1.3粒子产生
将粒子建模为一个可以选择的路径[m1,m2,…,mnd],其中mi(i=1,2,…,nd)为每一跳的无人机,mnd代表目的无人机。则可以利用广度搜索算法生成一定数量的初始路径,当作初始的粒子。而粒子的生成过程要设置一定的范围,例如局限于某一区域、链接质量的范围、无人机移动的相向度等,可以较好地避免较差的路由路径被纳入到粒子中。同样,初始粒子的个数要限制在一定的数量,并且随时可以补充新的粒子。
3.1.4 粒子更新
粒子的效用函数可以设置为传输成功概率,一般和每一跳的质量和条数有关,而每一跳的质量一般和无人机的相对移动速度、相向性和信道质量等相关[65]。而粒子的更新可以设置为局部更新,比如两两粒子比较的时候,截取两粒子(路径)相同的开始和结束点,比较这两段的效用函数,并且用好的效用函数的片段接替差的那一段,粒子就得到了更新,意味着粒子向最优解移动了一步。当前粒子和历史最优和局部最优的粒子分别比较和更新,直至到达了系统设置的阈值,则停止更新,获得了次优解。次优解的路径就是本次路由决策的输出结果。
3.2 仿真对比
将PSOR和GPMOR[13]、AFP[44]、OLSR[10]和AODV[11]进行仿真对比。GPMOR利用高斯-马尔可夫机动模型来预测无人机的运动,以消除高度动态运动的影响,然后根据移动关系和欧氏距离选择下一跳,从而做出更准确的决策。AFP应用了一种基于转发概率和转发区域准则的自适应转发方案,通过自适应计算转发概率,减少冗余重播。重传等待时间设置为10 ms,重传视作新一次的发送,不计入上一次的时延。将无人机的移动设置为相同的高斯-马尔可夫过程,将无人机的数量变化设置为10~200[66],请求路由无人机是随机的,而源节点是固定的,平均包的大小为1 500,无人机的活动范围在1 500 m×1 500 m×600 m范围内,无人机移动速度均值为60 km/h。PSOR代表了典型的分层路由、AFP和GPMOR代表了典型的地理路由、AODV和OLSR代表了典型的基于拓扑路由,这样仿真就涵盖了面向无人机自组网的路由协议的主要类别。
图4中,随着无人机数量从10~200的增加,3个协议的分组递交率(Packet arrival rate,PDR)都是逐渐下降的,这是因为随着无人机数量的增加,路径的扩张性和长度会增加,导致了PDR的降低。但PSOR性能始终都明显优于其他协议,这得益于PSOR对位置较好的预测,克服了移动性带来的问题,并且综合地考虑了信道质量等因素联合路由决策。从图4中可以看到GPMOR也取得很好的PDR表现,这是因为本仿真是基于高斯马尔可夫移动模型,所以基于此模型的预测移动的GPMOR也可以较好地克服移动带来的影响。而基于决策空间的AFP、基于主动链接质量的OLSR和基于被动决策的AODV则都并不能较好地克服移动问题。

图4 不同无人机数量下的PDR表现对比Fig.4 Comparison of PDR with different UAV numbers
图5展示了时延性能相对无人机数量的相对变化情况。其中PSOR始终拥有较好的时延性能,这是因为PSOR对位置能有较好的估计和预测,并在此基础上做出综合的路由决策。图5中,5个协议随着无人机数量的增加都缓慢增加,最后到达了10 s的阈值,因为无人机不可能无限地等待,所以设置10 s的阈值,超过这个时间如果还未收到发送成功的确认信息,无人机将启动重传过程。GPMOR因为能预测基于高斯马尔可夫的移动过程,所以也能做出相对优越的路由决策和取得较好的时延效果,然而其他协议则不能取得较好的时延效果,主要原因是不能对位置做出较好的估计和对未来移动性做出较好的预测。

图5 不同无人机数量情况下的时延表现对比Fig.5 Comparison of time delay with different UAV numbers
除此之外,从仿真结果中不难看出,动态的网络环境需要强大的预测和决策能力才能克服动态性的负面影响,SDN、EKF和PSO的技术是典型的集中运算、实施预测和快速决策技术,这为PSOR提供了强大的技术支撑,可能是未来路由研究的一个重要方向。
3.3 分析与总结
基于拓扑的主动式路由协议在无人机自组网中已经显示出了QoS上的性能改善,可以有效地传递数据[9]。但节点密度的变化影响着网络内的数据传输效率,节点移动性的增加导致了数据包传输率的降低,高节点密度会带来较大的路由开销和次优路由选择,从而导致数据传递延迟。所以表4中所总结的主动式路由的性能中,时延、PDR、和有效吞吐量(Goodput)表现中等,但路由开销和移动自适应性表现较差。因此,主动式路由仍然需要制定最优的路由策略,既能处理不同的节点密度,又能保持网络内数据包的顺利递交。降低路由开销和识别最优路由是另一个需要克服的挑战,因为路由机制需要自适应地制定策略来适应移动性,从而以较小的延迟识别最优路由。
基于拓扑的被动式路由协议利用各种按需优化机制来实现协议的反应式性质,以便在网络中成功有效地传输数据[9]。但增加的节点移动性在路由重建过程中会带来延迟,位置变化得非常频繁会导致路由失效,在路由建立和维护过程中产生了大量的路由开销。所以按需路由的时延、PDR、路由开销和移动自适应性较差,如表4中所示。因此,开发能够应对节点密度变化和节点位置频繁变化的路由机制,以提高包分发率、减少路由故障、提高平均路径生存期就显得尤为迫切。
基于拓扑的混合式路由协议虽然可以综合主动式和被动式的特点,但主动式和被动式各自的不足也不能从根本上避免,比如节点密度的变化还是影响着网络内的数据传输效率,节点移动性的增加导致了数据包传输率的降低和时延的增加,高节点密度也会带来较大的路由开销。所以在表4中,混合式路由在各方面的性能具有中等的表现,实际应用中簇的大小或主动式被动式的路由选择等方面都影响着性能表现。因此,混合式路由仍然需要制定最优的路由策略,在主动和被动模式之间自适应地决策。
基于地理的位置路由协议已经成为研究人员的热门方向,因为这些路由协议使用飞行节点的瞬时位置,帮助他们在高度动态的环境中识别和判断数据传输的持续路径。这种类型的协议成功地实现了最优的数据交付,通常具有较高的可靠性。但节点密度的增加会带来位置获得的难度和路由的计算难度,降低网络的包分发率,而且位置的突然变化非常频繁会导致路由失效。同时在路由建立和维护过程中也产生了大量的路由开销。因此在表4中,位置路由协议的时延表现中等,其他表现与各自的决策方法相关,但路由开销较大。所以需要研究更精确的位置计算和预测方法,更自适应的决策方法。

表4 常见无人机自组网路由协议特征对比Table 4 Characteristics comparison of typical FANETs routing protocols
基于分层的分簇路由协议主要利用利用节点的能量信息或位置估计来优化簇的形成。但随着网络生存时间的增加和节点的不均衡负载,会导致簇头分配趋于不合理、能量消耗不合理、节点的能耗也会增加和不均衡。所以表4中分簇路由的各方面的性能表现都是中等,但路由开销较大。
4 研究和展望
常见的路由较差的自适应性、没有适应无人机自组网场景的决策方法造成了路由性能的显著下降。近年来随着决策方法、优化方法和无人机性能的发展和提升,借助快速发展的新型网络架构,路由协议的发展将十分蓬勃。
4.1 基于拓扑协议的深入研究
现有的路由策略会不同程度地面临路由开销大、包传递率低、网络延迟大、路由故障频繁、网络生存期短等较差的性能表现[67]。造成这些问题的因素是节点的高流动性、节点位置的频繁变化、节点密度的变化和不成比例的能源消耗。主动路由协议在数据路由方面表现出了合理的性能,但无法处理飞行节点的动态问题。表驱动的路由识别机制无法应对频繁变化的链路来更新路由表。此外,这些类型的协议使用大量的控制消息来更新网络的路由信息,造成了巨大的路由开销,从而降低了路由性能。因此,设计能够迅速感知路由变化并将其反映到路由过程中而不给网络带来重大路由开销的机制,可以帮助这些协议克服这些挑战。被动式路由协议由于节点的动态特性,性能下降。设计有效的路由恢复机制,使网络路由开销最小,可以更快地重建路由。因此,制定一种有效的、减少控制包传输的路由发现机制,能够预测节点未来的位置,可以显著提高网络的数据传输能力。
4.2 基于移动性的深入研究
基于移动性的深入研究要克服移动性带来的负面影响和合理地利用移动性达到最优转发的目的[15]。因此借助强大的机器学习,部署计算量较低的预测模块在无人机上,或部署较大计算量的移动预测模块在移动边缘计算节点或者簇头和SDN节点,较好地克服移动性带来的负面影响[68]。同时在未来的工作中,协议设计应考虑无人机大流量应用的负载均衡问题[69]。研究更具有自适应性的、移动预测能力或者机会转发能力的路由协议,可以利用移动性达到性能提升的目的。具有摆渡无人机的网络要可以自适应地根据网络状态调整数量和覆盖范围,才可以减少成本和提高服务质量。
4.3 基于新型网络架构的深入研究
无人机自组网已经实现了多种应用,新兴技术的发展也为更多应用的支持提供了可能[21]。已有文献研究了无人机自组网与移动边缘计算系统、移动边缘云计算和物联网系统的集成,研究人员试图使用无人机作为边缘路由器,承接部分其他节点处理任务的卸载[21]。此时,无人机自组网与移动边缘网之间通信的可靠性是非常必要的,完成处理任务所需的飞行无人机资源的可用性也是需要考虑的重要因素。无人机的移动性因素也可能成为无人机自组网和移动边缘计算系统之间正在进行的通信障碍。此外,这些移动边缘系统还可以辅助无人机自组网路由协议,收集飞行节点的信息以实现有效路由。这些系统可以向路由协议提供节点位置、移动方向和移动速度等信息,以便它们进行操作。这些信息还可以帮助预测节点的未来位置。这些领域的研究范围很广,因为与之相关的文献很少。网络切片技术[70]赋能的高可靠高性能路由决策方法也是未来有效的解决方案之一。高可靠低时延(Ultra reliable and low latency communication,URLLC)[71]是即将到来的下一代网络继增强移动宽带(enhanced Mobile broadband,eMBB)和大规模机器通信(massive Machine-type communication,mMTC)之后提供的3个不同特性之一。URLLC对于支持关键任务应用的重要用例是不可或缺的,包括无人机控制信息交付、车对车(V2V)通信、自动驾驶无人机、智能无人机等。因此开发URLLC场景下支持智能请求或混合式自动重送请求(Hybrid automatic repeat request,HARQ)的通信方法是非常急需和具有挑战性的。
4.4 基于路由安全的深入研究
无人机自组网中容易忽略的一个方面是安全性。数据被盗可能会导致灾难性的后果,尤其是军事领域到工业和农业的各个领域,因此需要为无人机自组网开发安全的路由协议。在通信通道上留下开放的数据将会诱使恶意的人或个体来窃取、操纵和提取敏感信息,从而剥夺用户获取实际信息的权利。因此,安全路由协议的开发可以防止这种异常情况,干扰偷窃者破坏网络安全。
综上所述,自主移动无人机之间的数据路由是一项相当复杂的任务,为此人们设计了许多路由协议,使用各种寻径策略和路径恢复机制来提供持续的数据传输路径。但是,路由协议在处理网络的动态性时仍然面临着挑战,因此在实际应用中性能显著下降。为了克服性能下降的问题,迫切需要改进无人机自组网的路由策略,使路由操作能够与网络的动态特性同步优化。
5 结束语
本文综述了无人机自组网中路由领域的最新进展,研究了最近开发的无人机自组网路由协议,并分析了它们的优缺点,讨论强调了路由策略的许多优劣,有助于在飞行节点之间实现数据的最优路由,以便研究者能根据场景和任务选择合适的路由协议。由于节点的高流动性、节点位置的频繁变化、节点密度的变化和不成比例的能源消耗,在某些情况下,路由策略的开销大、包传递率低、网络延迟大、路由故障频繁和网络生存期短等问题较为突出。本文重点介绍了最新的PSOR,并且将该协议和其他大类的典型路由协议共同对比,分析了性能表现,为未来研究提供思路。未来研究应着眼于提高路由协议的自适应性、借助新型移动预测方法、借助新型网络架构和决策架构,在6G异构网路蓬勃发展的今天,无人机自组网路由协议的研究一定可以蓬勃发展。
猜你喜欢
计算机与数字工程(2022年3期)2022-04-07
国际太空(2021年11期)2022-01-19
民用飞机设计与研究(2020年4期)2021-01-21
计算机与网络(2020年9期)2020-07-29
网络安全和信息化(2019年11期)2019-11-25
科技传播(2019年24期)2019-06-15
科技与创新(2018年1期)2018-12-23
物联网技术(2018年8期)2018-12-06
移动通信(2017年19期)2017-11-14
电子制作(2017年24期)2017-02-02