生物软组织力学测试及相关理论研究
2022-10-11 01:31:32康巍徐鹏卜伟平岳艳鲜王丽珍樊瑜波
兵工学报 2022年9期
康巍, 徐鹏, 卜伟平, 岳艳鲜, 王丽珍, 樊瑜波
1. 北京航空航天大学 生物与医学工程学院, 北京 100083; 2. 北京航空航天大学 北京市生物医学工程高精尖创新中心,北京 100083;3. 北京航空航天大学 生物力学与力生物学教育部重点实验室, 北京 100083;4.中国人民解放军空军特色医学中心, 北京 100142; 5.北京航空航天大学 医学科学与工程学院, 北京 100083)
0 引言
根据人体不同组织、器官其弹性和黏性程度的差异可分为硬组织和软组织,硬组织包括典型的骨骼系统,软组织包括皮肤、肌肉、脑组织及各种器官等。随着轻型、非致命性等武器的快速发展,针对其打击毁伤以及单兵防护技术的研究也在同步进行。此类型武器主要作用于人体软组织结构,而生物软组织致伤机理和评估的方法包括人体志愿者实验、实体实验、动物实验、假人实验、数值仿真等。其中志愿者实验由于高速撞击实验易引起不可逆损伤而不宜采用,尸体实验存在供体数量不足及组织力学特征改变等问题,动物实验存在由于其与人体解剖结构、重要器官构成等方面存在较大差异,以及动物科系和个体间差异较大、同时多样本实验涉及伦理学限制等问题。高仿真度假人靶标和数值仿真模型具有可重复性好、无伦理学限制等优势,已成为研究高速撞击对生物组织损伤效应评测最重要的方法。对生物软组织在高应变率下的动态力学特性开展研究,构建高拟合度的本构模型及获得精准的材料参数是假人靶标技术升级的瓶颈,也是实现有效的数值计算和仿真的基础。
软组织的力学性能表征通常通过黏弹性或超弹性模型对组织的应力- 应变响应进行理论表征,以预测软组织在动态力学刺激下的力学响应。一般常规准静态实验中的应变率为10~10s量级,而轻型武器射速通常为300~1 000 m/s, 对于子弹等高速冲击载荷条件下的可变形固体, 具有短暂时间尺度上发生载荷显著变化的特点,这就意味着高加载率或高应变率下,涉及应力波传播的动态冲击实验中的应变率可以达到10~10s,比静态实验中高多个量级,故其在高应变率(高速撞击作用)下的力学响应测量及黏弹性、各向异性等力学性能分析也不能只依靠常规的准静态测试方法。
先前工作者提出的本构参数大多是用单一加载模式的实验数据进行校准的,但在实战中子弹等高速物体往往不是单一冲击模式,因此对于任意模态的力学冲击情况不一定成立,并且在目前的研究中,鲜有从基础理论进行探讨。本文旨在从基本的变形开始到具体的本构理论研究描述样品各加载方式下的变形张量及应力主面,得到生物软组织及其对应仿生靶标的最大受力面及破坏程度等,为能制备真实反映实战环境下的人体仿生靶标提供理论指导。
1 连续介质力学基本理论
1.1 变形梯度张量
根据笛卡尔直角坐标系下的有限变形理论,参考构型中点和当前构型中的点通过变形函数(,)相联系,即
=(,)
(1)
在参考构型中,相邻两点可以取为和+d,则在当前构型中相邻两点为(,)和(+d,)。对(1)式进行泰勒展开并略去高阶小量,有
d=(+d,)-(,)=d
(2)
式中:的几何意义是变形函数的梯度,称之为变形梯度张量,

(3)
式中:(=1,2,3)为当前构型的基矢量;(=Ⅰ,Ⅱ,Ⅲ)为参考构型的基矢量。变形梯度的行列式是一个雅可比矩阵,定义当前构型和参考构型的体积比=det。
1.2 应变与应力度量
动态力学下发生大变形,引入右Cauchy-Green变形张量和左Cauchy-Green变形张量,

(4)

(5)
式中:为描述Seth应变度量的无量纲数;为基矢量方向的主伸长;为基矢量;为单位应变张量。保证2为整数时,若=1,则=12(-)= 12(-)表示为Green应变,若=12,则(12)=12(-)=12-,表示物质Biot应变,若=0,则=ln=12ln,表示物质Hencky应变,若=-1,则=-12(-)=-12(-),表示物质Piola应变。
Cauchy应力张量定义为当前构型上的2阶对称应力,作用在单位参考构型面积上的力为第一类Piola-Kirchhoff应力,称为名义应力,根据参考构型与当前构型转化关系可得,
=J
(6)
作用在参考构型上且具有对称作用的第二类Piola-Kirchhoff应力,与和关系为
==J
(7)

(8)
的5个应变不变量为
(9)
表示横观各向同性轴的单位矢量。
2 率型本构模型
生物软组织以及仿生靶标等软材料具有非常明显的应变率效应,在动态冲击下不仅具有明显的超弹性性质,还表现出黏弹性特性。为了完整描述软组织从准静态到高应变率条件下的力学性能,并联两部分组装成新本构模型,即

(10)

2.1 准静态模型
生物软组织一般认为是体积近似不可压缩、泊松比在049左右的超弹性材料,超弹性定义为一个物体典型点在任意时刻的内能密度完全由该时刻点的应变状态确定。常见的超弹性本构模型主要包括基于连续介质力学的唯象型、基于材料微结构以及唯象结合基于微结构的杂交模型。下面每种各举一个典型本构模型,并在下文中推导至通过实验数据确定材料参数的拟合公式。
唯象型本构模型中分为两类,在各向同性、等容性等假设下,基于应变不变量,Mooney得到了适用于橡胶材料的应变能函数,表达式如下:
=(-3)+(-3)
(11)
式中:和为材料常数;和分别为应变的第一和第二不变量。基于主伸长率,Ogden得到了适用于不可压缩橡胶类材料大变形情形下的本构关系,

(12)
式中:为材料常数(剪切模量);为无量纲的待定系数(应变硬化指数);(=1,2,3)为3个主方向上的主伸长比;为正整数。Treloar基于材料微结构从橡胶类材料中无定形结构中的分子链网状结构的统计力学出发,得到

(13)
Gent结合唯象和基于微结构通过考虑分子链的极限伸长率,将应变能函数表示成第一应变不变量的对数函数形式,

(14)
式中:为剪切模量;是一个常数为-3的最大值。
综上应变能密度函数都表达了各向同性基质的应变能,对于肌肉等横观各向同性软组织基于Spencer的理论,
=(,)+()+(,,)
(15)
式中:表达了各向同性基质的应变能;表达了纤维或者轴突自身的应变能;表达了纤维与基质之间的相互作用。Weiss等认为引起的应变能可由、、表示。对于部分,主要表现为纤维的拉伸或压缩引起基质内部产生应力。这种相互作用类似于剪力偶的形式,通过实验获取相关数据较为困难。
Criscione等提出两个新的不变量,、如下:
(16)
Ito等引用、得到
(,,)=
[(,)]+[(,,)]
(17)
式中:、分别为沿着纤维方向和垂直于纤维方向的剪切模量;为纤维和基质组织相互剪切作用产生的应变能,肌肉中的肌纤维在压缩时会发生屈曲、不予考虑,但是白质中的轴突需要考虑应变能,选用公式如下:

(18)
式中:、为材料参数。对于脑组织中的灰质以及肝脏、肾脏、皮肤等采用各向同性本构模型(11)式~(14)式,对于肌肉以及白质采用横观各向同性本构模型(15)式~(18)式,其考虑了各向同性基质的应变能,以及白质的轴突与肌肉的肌纤维压缩应变能且与各向同性基质间的相互作用。
2.2 动态模型
生物软组织在高应变率条件下表现出黏弹性,其力学行为与之前的变形历史有关。本文主要讨论两种,一是用两个Maxwell单元(分别表示动态应变下的高低应变率)构建的黏弹性模型直接通过应变和应变率表示应力,
(19)

另一种是通过变形张量进行描述,黏弹性部分在连续介质力学中,基于各向同性且不可压缩假设得到PK2应力张量为
(20)
式中:为一个描述应变历史对应力影响的张量泛函;为时间项;()为时刻右Cauch-Green变形张量。由可得三维形式的非线性黏弹性模型表达式:

(21)
式中:表示黏弹性材料的静水压力。关于张量泛函的表达式,应用最多的就是BKZ模型,采用单积分形式的张量泛函。
第1种黏弹性本构模型的优势在于应力- 应变关系通过高低应变率两种分别表述,具有很强的针对性,但是局限于一维加载;第2种黏弹性本构模型从连续介质力学的基本原理进行推导,构建得到完整的应力张量,适合宽应变率范围生物软组织的率型本构模型,并且适应多方向的加载。
可以摒弃分别求解再由叠加原理组装的本构方程(10)式,根据超弹性模型的应变能函数决定材料黏弹性的应力响应,运用卷积积分引入生物软组织的黏性特性方法来替换(20)式,除了21节中的准静态模型,还包括考虑无条件稳定性、只有一个材料常数的Neo-Hookean模型,以指数形式表达的Fung-Demiray应变- 能量函数,Gent提出的表征快速应变硬化的本构模型,与常剪切模量不同能描述随变形而变化表征典型S形的应力- 应变关系的Yeoh模型(3阶)。合理的本构模型就是能用拟合出来的生物软组织参数解释在各种实验状态下的应力- 应变数据,针对各种加载情况下得到的稳定结果,能够描述软组织较大的变形范围。
3 力学测试的实验方法与数据分析
从生物软组织中取样时尽量避开大的脉管、取均质体部分,使用打磨锋利的方形钻具获得的标本形状为立方体,设定样本边长为,主伸长用(=Ⅰ,Ⅱ,Ⅲ)表示,生物软组织试样获取与制备的核心是保证其活性,针对几种典型的生物软组织皮肤、肌肉、脑组织及各种器官等,皮肤与脏器可以近似假设为各向同性,但是肌肉因为肌肉纤维的存在以及脑组织中白质由束状髓鞘化的神经细胞突起(或轴突)组成,具有高度方向性,在提取表现出显著各项异性软组织时要保证沿着肌纤维或轴突取样。
3.1 静动态实验方法
生物软组织的准静态实验依托三轴测试装置,如图1(a)所示,在单轴压缩实验过程中与样本接触的两个金属加载圆盘表面均匀涂抹少量润滑剂以便于自由伸展,上部平台沿3轴向下移动;双轴压缩实验相当于纯剪,在不限制样品3轴位移下沿着1轴、2轴压缩;简单剪切实验中需要使用少量胶粘剂将样品底面粘在应力测试装置(,)面,称为下部平台,(,)面整体相对于固定的上部平台移动,(,)面施加的简单剪切需要将测角仪与三轴应力测试装置下部的平台置于同一平面;混合加载需要简单剪切实验叠加压缩载荷实验,恒定压缩下剪切需要在样品底面添加少量胶粘剂以保证底面与下部平台整体移动,恒定剪切下压缩需要使用磷酸盐缓冲溶液湿润样本以确保无粘连、便于自由伸展,三轴传感器同时记录3个方向上的数据并由电脑终端显示。
生物软组织高应变状态下的动态压缩实验在SHPB上进行,整个实验装置如图1(b)所示,整个实验装置系统由气枪、撞击杆、入射杆、透射杆、吸收装置、数据采集系统等组成,入射杆和透射杆中间放置生物软组织样本,两端涂抹润滑剂以减少摩擦。实验时,撞击杆在气枪中高压氮气的作用下沿着枪筒加速,与入射杆碰撞,从而产生一个压力脉冲,即入射波。然后入射波通过入射杆到达与试样的交界面,对试样产生一个矩形压力脉冲,使得生物软组织样本产生高速变形。另外在入射杆中会产生反射波,而试样中的应力波最终到达透射杆,在透射杆中同样会产生一个压力脉冲,被称之为透射波。入射波和反射波可以通过粘贴在入射杆上的箔式电阻应变片测得,同样,透射波可以通过粘贴在透射杆上的半导体应变片测得。两个应变片接到超动态应变仪,信号经过超动态应变仪放大输送,最终由计算机系统计算并显示结果。
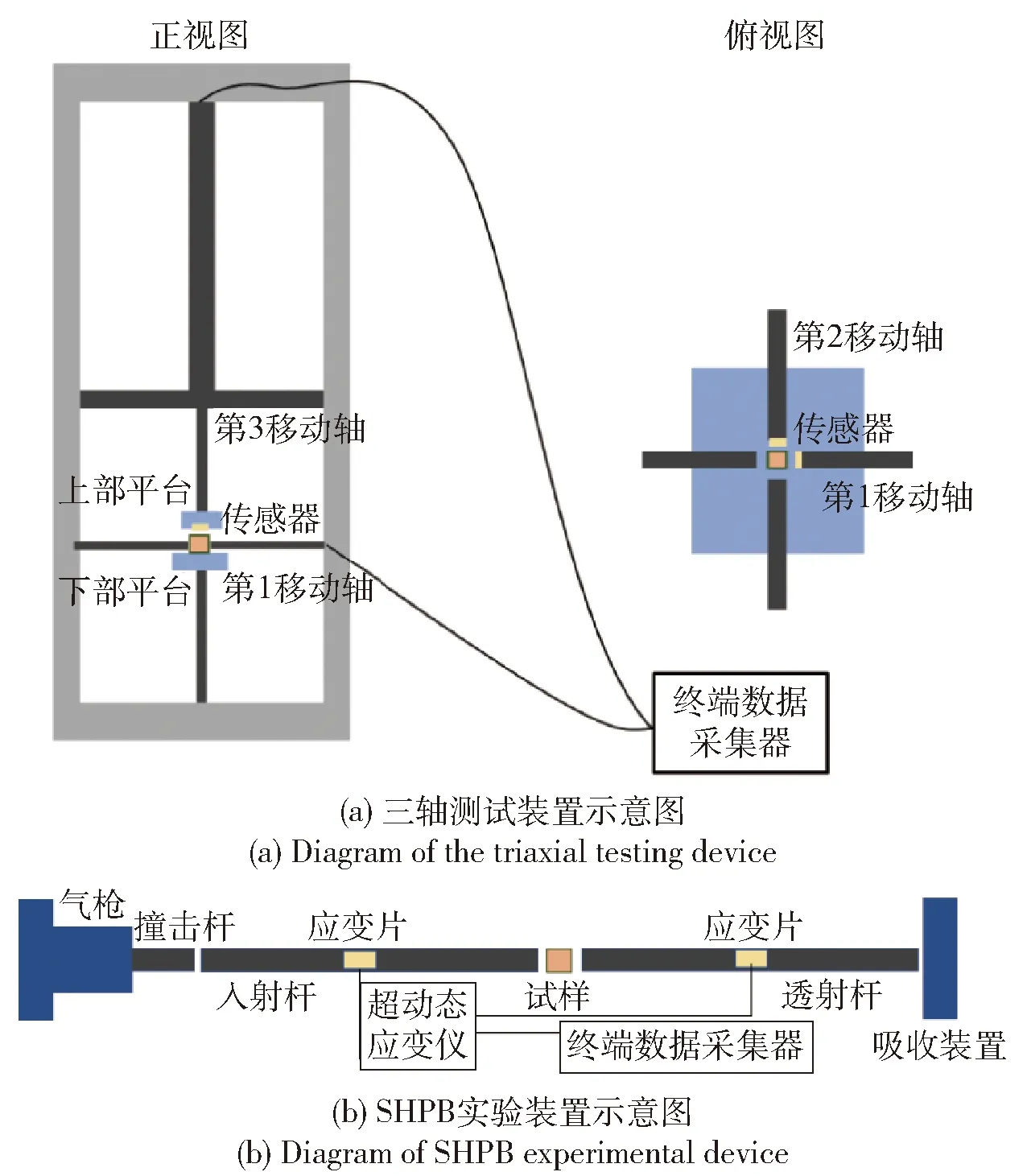
图1 动静态实验装置示意图Fig.1 Diagram of dynamic and static experimental devices
力学加载实验可以得到受测样本所受的载荷力以及位移,通过对数据处理得到应力=和应变=。生物软组织静动态实验的区别在于加载率的不同,静态实验下样本的加载依靠低速运动的移动轴,因此也被称为准静态;动态实验下样本的加载依靠被撞击杆碰撞而高速运动的入射杆。受SHPB装置的场地等方面限制,未能开展多轴加载实验,而准静态实验三轴测试较为成熟,全面表征软组织力学性能需要静态与动态实验结合。随着应变率的提高,试样的强度也明显提高,呈现出很明显的应变率效应,实验仅记录达到屈服极限前的应力- 应变关系,即当位移足够大时,生物软组织已经被破坏,用表征力学性能的靶标制备来反映武器效能是无意义的。
3.2 单轴压缩
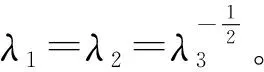
在单轴压缩实验中,如图2(a)所示,样本压缩应变为,则=1-。设软组织样本立方体在无侧限压缩下均匀变形,因此变形梯度和右Cauch-Green变形张量的矩阵形式为
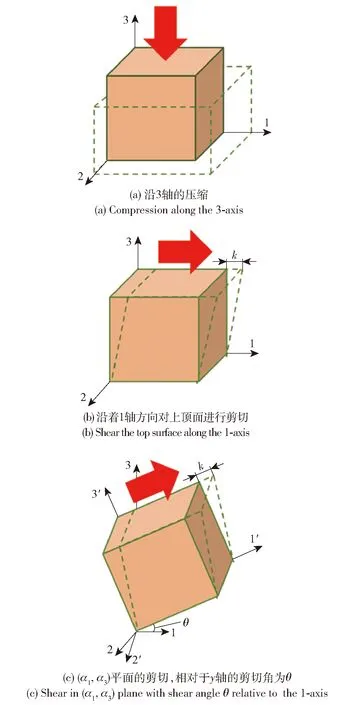
图2 软组织样本单方向变形示意图Fig.2 Diagram of soft tissue specimen deformation in a single direction
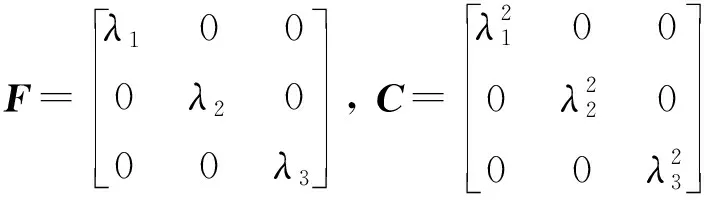
(22)
3.3 简单剪切
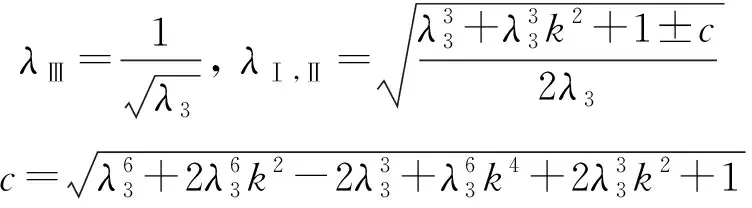
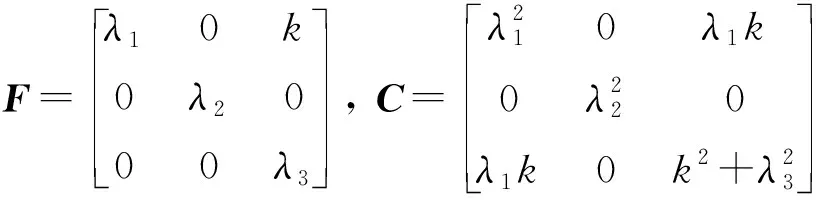
为量化生物软组织的剪切响应,计算了样本在1轴方向剪切量为,如图2(b)所示,简单剪切变形梯度和右Cauch-Green变形张量为

(23)
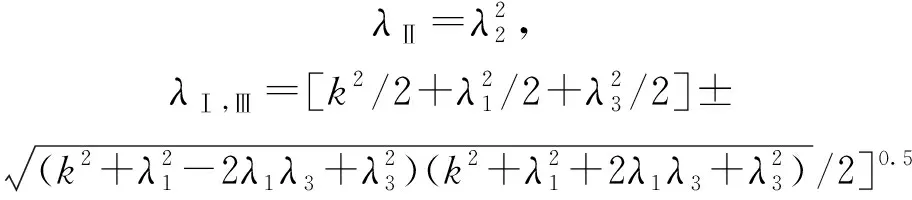
此时主伸长为

(24)
如果在(,)平面施加简单剪切,剪切方向与1轴呈角(见图1(c)),则建立新坐标系(1′,2′,3′),进行坐标变化,则新旧坐标系之间的关系为
=cos+sin
=
=-sin+cos
(25)
代表坐标轴,下角标表示轴向。则和为
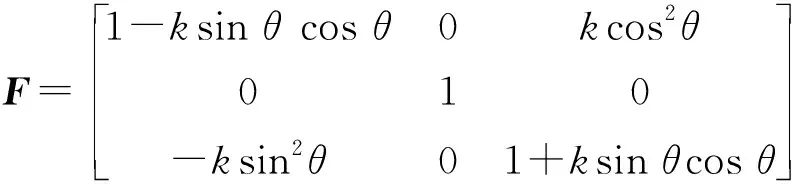
(26)
3个主伸长为
(27)
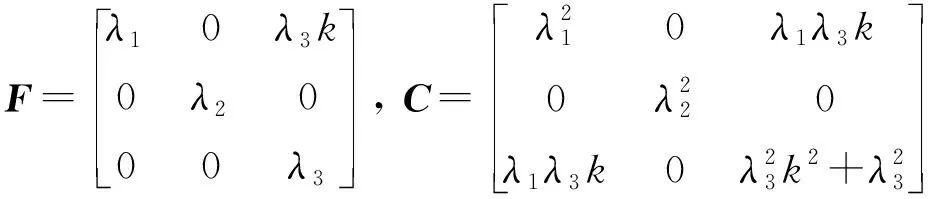
3.4 双轴压缩
在双轴压缩实验中,如图3(a)所示,样本在1轴、3轴的压缩应变为和,=1-,=1-,双轴压缩相当于纯剪,并未发生旋转,因此变形梯度和右Cauch-Green变形张量的矩阵形式与(22)式一致。
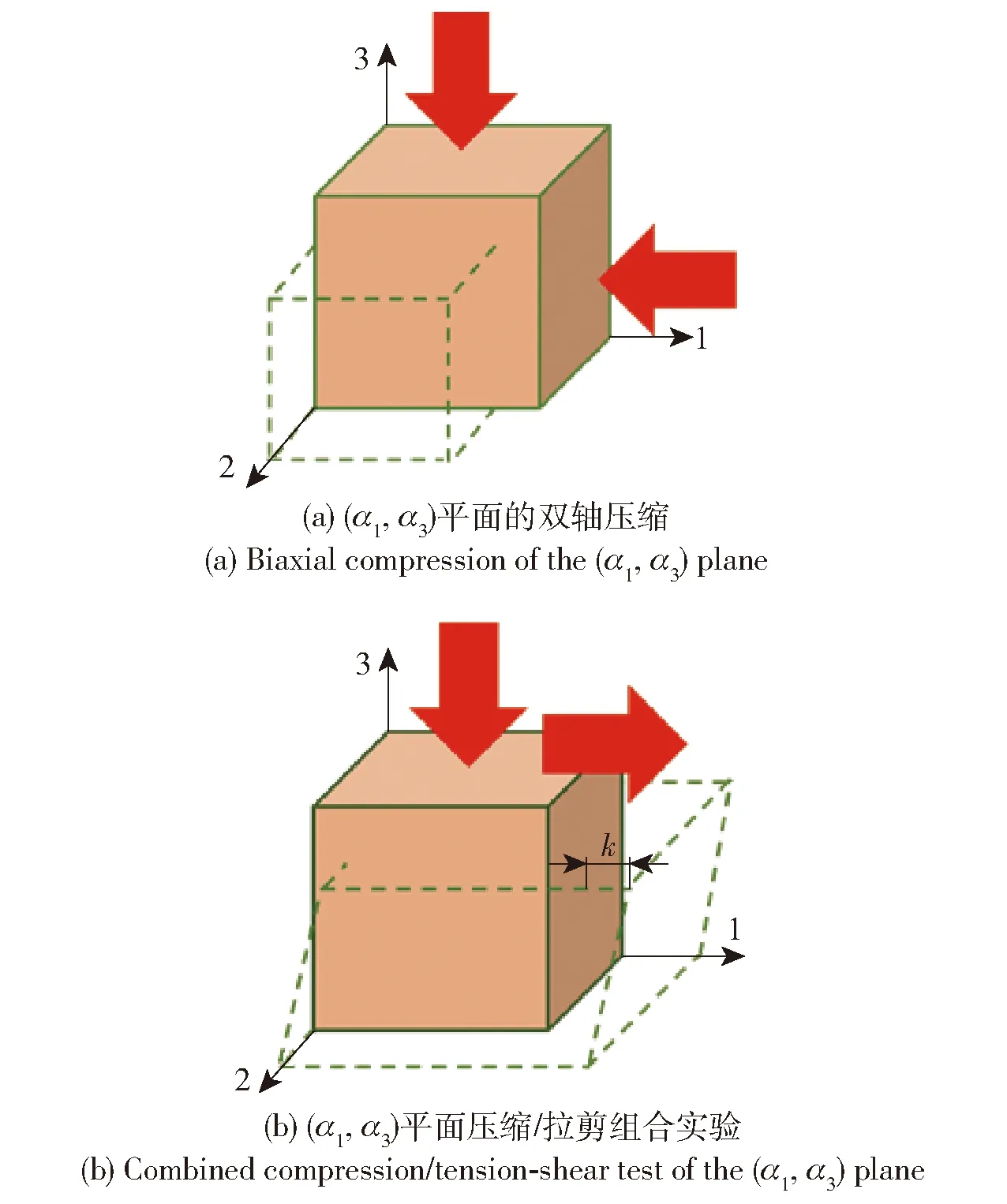
图3 软组织样本多方向变形示意图Fig.3 Diagram of multi-directional deformation of soft tissue specimen
3.5 混合加载
在压缩剪切组合实验中,将简单剪切与轴向压缩叠加(见图2(b))。分为在恒定压缩下变化剪切量,或恒定剪切情况下变化压缩应变,观察1轴方向和2轴方向上的位移。混合加载实验中,恒定压缩下变化剪切量,则和为
(28)
式中:3个方向主伸长为
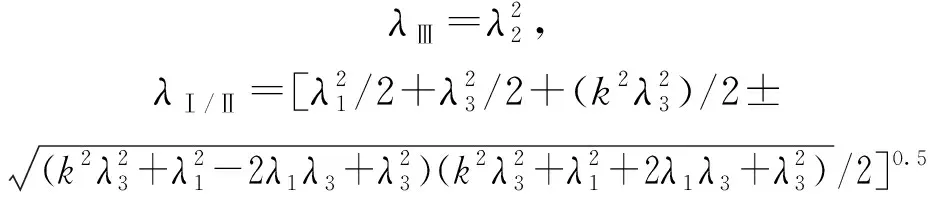
(29)

(30)
恒定剪切情况下变化压缩应变,则和为
(31)
则3个主伸长为
(32)
除获取不同加载模式下的主伸长量,本构模型以及参数标定方法对于理论与实验相结合是至关重要的,以应变能密度表达式(11)式进行推导为例,Mooney-Rivlin超弹性材料体内处某点处的PK2表示如下:

(33)
式中:为静水压力。结合正文中应变不变量公式(9)式,得到
=(2+2)-2-p
(34)
结合(7)式推导PK1和PK2以及Cauchy应力的关系,得

(35)
根据Cayley-Hamilton定理,可以将Cauchy应力进一步表示如下:
=2-2-(-2)
(36)

=2((1+)-(1+))(+(1+))
(37)
将测试数据代入(37)式,便可以拟合实验曲线得到材料参数和。
4 结论
为全面了解软组织在高速压缩载荷下的力学行为,本文从物体受力的形变出发,归纳总结了基于不同模型建立的超弹性及黏弹性本构模型,有以下贡献:
1) 区别于单纯通过已有公式拟合应力- 应变数据,本文基于连续介质力学基本理论详尽的推导并建立了各种加载方式下的变形模型;
2) 当前大多数生物软组织的力学实验仅为单轴加载,不足以全面表征软组织力学性能,本文从单轴加载拓展到多轴乃至混合加载进行了阐述;
3) 本文推导出了各种加载方式下的3个主伸长量,使得剪切加载方式下能找到生物软组织的应力主面,便于确定人造仿生靶标的最大损伤面。
本文工作为探索能够准确表征人体软组织力学性能的仿生人体靶标构成材料提供了理论与方法支撑。受限于当前条件,目前只是进行了理论推导,下一步将开展具体实验,探索基于人体软组织力学准确表征的仿生靶标材料。
猜你喜欢
数学物理学报(2021年1期)2021-03-29 03:13:38
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08 00:48:08
五邑大学学报(自然科学版)(2020年4期)2020-12-09 06:28:48
工程与建设(2019年3期)2019-10-10 01:40:44
西南交通大学学报(2018年5期)2018-11-08 10:58:58
北京航空航天大学学报(2017年10期)2017-04-20 08:51:23
潍坊学院学报(2017年2期)2017-04-20 08:44:24
山西大同大学学报(自然科学版)(2016年2期)2016-12-12 03:19:27
航天返回与遥感(2014年4期)2014-07-31 17:47:47
无机化学学报(2014年4期)2014-02-28 17:31:08