作战飞机突防航迹规划方法研究综述
2022-10-11 11:55唐鑫磊余付平张仁猛
航空兵器 2022年4期
张 哲,沈 堤,唐鑫磊,余付平,张仁猛
(空军工程大学 空管领航学院,西安 710051)
0 引 言
作战飞机在执行打击敌纵深重要目标任务时,通常需要突破由预警探测雷达、 地空导弹武器系统和高射炮等力量构成的多层防御体系。随着预警雷达和地面防空武器技战术水平的不断提升,作战飞机在执行突防任务时将面临极大的风险挑战。作为能有效提高突防成功率的措施之一,突防航迹规划的好与坏极大影响着突防的成功与否。然而,多层次防御体系中威胁数目多、 成员间存在科学的配置关系且有动态的防御部署,使得突防航迹在规划过程中面临着准确模型建立难、 求解速度要求高的现实问题。
现有的突防航迹规划相关综述类文献中,韩志刚和叶文等都对低空突防航迹规划方法进行了综述,对常用航迹规划算法进行了介绍,并指出多种算法结合使用将是后期的发展方向。但存在以下不足: 一是未对突防航迹在预先和实时规划上的不同特点和目标要求进行区分; 二是只将突防航迹规划算法作为综述重点,忽略了规划模型的重要作用; 三是仅对常用算法的原理及应用进行介绍,未进行横向和纵向比较,即不同算法间比较和相同算法的不同改进型间比较。
鉴于此,本文综合考虑规划模型和规划算法对最优突防航迹生成的影响,通过分析对比前人在规划模型和优化算法方面所做的工作,对当前有人和无人作战飞机突防航迹规划方法进行综述; 同时,总结存在的不足并对未来发展趋势与研究方向进行展望。
1 作战飞机突防航迹规划概述
作战飞机突防航迹规划是指根据作战飞机突防任务要求,依据规划的基本原则和流程,在突防起始点到终止点间规划出能有效规避威胁源并满足飞机性能要求的最优或可行航迹。
1.1 作战飞机突防航迹规划基本原则
作战飞机突防航迹规划的基本原则主要是依据突防任务性质制订的。突防是指作战飞机抵近和突击敌方预定目标时穿越或突破其防空体系的作战活动。因此,突防航迹规划活动通常围绕作战飞机的突防成功率展开,其基本原则可分为以下几点:
(1) 隐蔽性原则。为最大限度降低作战飞机被敌方雷达发现的概率,在航迹规划的过程中需要考虑其隐蔽飞行的要求,即在雷达探测的低空盲区或者地面障碍物遮蔽下的盲区内飞行,以隐蔽接敌的方式来缩短其响应和处置时间。
(2) 安全性原则。作战飞机所处的突防环境复杂,对情报信息的掌握和飞行操作人员的技术水平都有很高的要求。因此,其任务难度大、 危险系数高,在突防航迹规划过程中需充分考虑雷达、 地面火力威胁的规避和地物避撞,确保作战飞机安全抵达目标空域。
(3) 高效性原则。突防任务对于作战飞机在威胁区域的飞行时间要求较高,规划的航迹应当尽可能短,以确保作战飞机能用最少的飞行时间穿越威胁区域。
1.2 作战飞机突防航迹规划的分类
围绕作战飞机突防航迹规划的主要内容和基本流程,国内外专家学者开展了大量的理论方法研究,通过文献整理和分析得出,现有研究成果的创新在各个方面都有涉及。因此,其类别因研究切入点不同可以有不同的分类方式。常见的分类方式如图1所示。
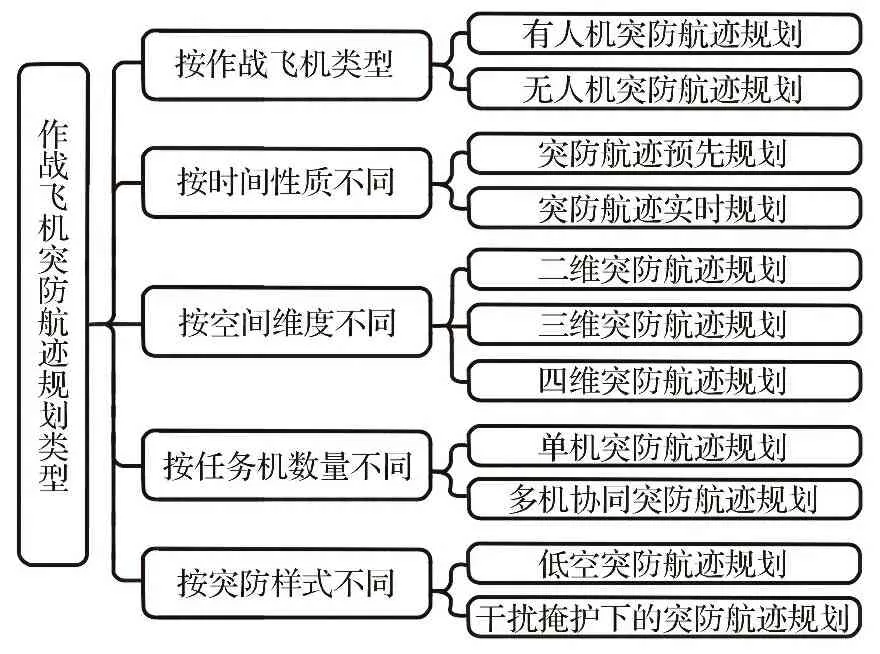
图1 作战飞机突防航迹规划分类
1.3 作战飞机突防航迹规划内容及流程
作战飞机突防航迹规划的主要目标是通过适当方法规划出满足任务、 环境约束条件和飞机性能指标的飞行航迹。围绕这一目标开展的主要工作有航迹规划的空间建模、 约束条件分析、 航迹代价评估与优化建模和航迹规划算法选取。
(1) 航迹规划空间建模。包括地形空间建模和威胁空间建模两个方面: 地形空间建模又包括了地理信息的获取与处理; 威胁空间建模主要涉及预警雷达探测、 地面防空武器威胁等的建模。
(2) 航迹规划约束条件分析。作战飞机突防过程中的约束条件主要分为自身物理约束、 作战环境约束和作战任务约束三个方面: 自身物理约束主要指由于飞机性能指标的影响,在航程、 航速、 飞行高度、 爬升/下降角和转弯角等都存在最大/最小值; 作战环境约束是指地形、 气象等环境因素对飞行安全产生的限制; 作战任务约束是指根据任务需要所明确的飞行要求。
(3) 航迹代价评估与优化建模。航迹代价评估是指通过选择重要的变量作为航迹代价指标,结合权重分配建立代价函数,以此作为评价航迹优劣的标准,常用的航迹代价指标有航程、 飞行高度、 与敌方雷达距离以及时间和空间协同代价等。航迹优化是指考虑各类影响因素,对生成的航迹进行平滑处理或者航迹点调整优化。
(4) 航迹规划算法选取。航迹规划算法是航迹规划问题求解的核心。选取合适的算法并结合具体模型特点对算法进行改进,结合代价函数规划出满足约束条件和威胁规避要求的可行或者最优航迹。常用规划算法可分为传统算法和智能优化算法两大类。
突防航迹规划的方法复杂多样,但是主要内容和规划流程相对较为固定,其流程描述如图2所示。

图2 突防航迹规划流程
2 突防航迹规划空间建模方法
作战飞机突防航迹规划空间建模包括地形空间建模和威胁空间建模两部分: 地形空间建模是指通过对突防区域地理信息的获取和数据处理,将其转化为突防飞行底图的过程; 威胁空间建模是指对敌方雷达、 地空导弹和高射炮等火力威胁范围进行建模的过程。
2.1 地形空间建模
地理信息获取和处理是突防航迹规划的基础和首先要解决的问题。地理信息处理的好坏直接影响到搭建的规划环境是否与实际飞行环境吻合一致,如果相差较大则航迹将不可飞,易造成飞行安全问题或暴露于敌雷达探测范围内。地形空间的建模通常以数字高程(DEM)数据为基础,数字高程数据是一组用有序数值阵列描述地球表面高程或海拔高程信息及其空间分布的数据集,是一种离散的表示方式。
2.1.1 基于数据插值的地形空间建模
地形的数字高程数据在生成过程中仅采集网格点上的高程信息,网格内的高程数据无法体现,因此,在使用时可能与实际存在较大偏差。为得到部分不在网格点上的特殊位置高程信息,需要通过数据插值的方式对地形空间进行处理。常见的插值方法有双线性插值、 双立方Hermite插值和二维三次卷积插值等。樊旭东等通过二维三次卷积插值法对数字高程地图进行了处理。
2.1.2 基于平滑处理的地形空间建模
考虑到作战飞机的机动性能和飞行安全,尤其是在低空突防时地形起伏较大的情况下,很难在满足飞行姿态调整次数少的同时实现完全的地形跟随飞行。因此,需要在地形空间建模时对实际地形进行平滑处理。
白晓利等将垂直方向上的离地间隙作为指标对地形进行平滑处理,方法较为简单且便于工程化实现。彭建亮等基于无人机在最大爬升/下降角和法向过载方面的机动性能要求,以坡度和曲率两个指标对地形进行平滑处理,生成可飞的平滑曲面。张志伟等将地形通过升限处理、 洼地填平和禁区剔除的方式生成平滑的安全曲面。刘希等对多无人机低空突防问题进行研究时在可飞曲面生成中提供了高度分配方案。翁兴伟等针对使用平滑算法对地形高程预处理时出现的点位拉高而不收敛情况,将最大过载、 爬升角和速度约束作为地形平滑的指标,设计多步判断逻辑防止相互拔高和削平,达到更好的平滑效果。
地形空间的平滑处理不仅要满足作战飞机性能的需要,还需抬高安全飞行曲面,为突防飞行预留合适的安全裕度,在此基础上开展突防航迹规划。
2.1.3 基于灰度图像转化的地形空间建模
基于灰度图像转化的地形空间建模是在地形高程数据的栅格式数字地图的基础上,将其转化为灰度值范围在0~1之间的灰度图像的过程。
穆中林等通过将地形数字高程转化为灰度值建立灰度图像并叠加威胁区等效威胁,形成供规划使用的灰度图像。在规划过程中基于分水岭分割方法,引入控制标记符对灰度图像进行分割形成无向网络图。Jaishankar等提出一种图像处理中的距离变换方法,该方法将三维环境用灰度图像的方式进行表示,并以此作为航迹规划的底图。其用类似于地理信息系统的技术以地理位置分层数据的形式对三维环境进行建模,将空间多准则决策分析技术与距离变换技术相结合,生成最优的突防航迹。
这种地形空间建模方法主要借助高程数据的简单处理和转化来实现,对于复杂规划问题的求解影响较小,实际应用较少。
2.2 威胁空间建模
威胁空间建模主要解决如何对威胁信息进行准确处理和量化的问题。建立合理的威胁空间模型,才能清楚地区分可飞区域和不可飞区域,判断敌雷达探测和火力打击范围,对提高作战飞机突防成功率具有重要意义,对突防航迹规划的速度也将产生直接的影响。
2.2.1 基于通视性分析的威胁空间建模
雷达探测和低空火力因受到地形和地球曲率的影响而产生作用盲区,因此,为取得更好的突防航迹规划效果,需要通过通视性分析来建立更为真实的威胁空间。通视性分析主要依赖地形高程数据,结合雷达和地面防空武器性能指标,对敌方地面实际威胁范围进行建模。
郝震等考虑现实环境下地形对雷达探测产生遮蔽的情况,采用地形可视性算法对雷达真实探测范围进行计算,该方法考虑了雷达的真实探测范围,使条件假设更符合实际。唐隆等对低空突防过程中出现雷达探测威胁不可规避的情况,对雷达进行通视性分析并建立其探测模型。汪先超等通过对预警机雷达在地物杂波背景下的目标探测体制进行分析,得出其所用的PD体制雷达存在多普勒盲区,在对多普勒盲区形成机理进行分析的基础上,对预警机的空中探测威胁进行建模。胡艺铭等在考虑地形遮蔽的条件下,用混合采样的方法生成雷达三维探测范围并进行修正。潘明等将作战区域以正六边形做剖分,基于多雷达探测概率融合和地形遮蔽对威胁空间进行建模。
2.2.2 基于等效模型的威胁空间建模
由于威胁空间较为复杂多样,使得在威胁空间建模的过程中很难进行精确描述,因此,通常将其等效为规则的半球体和圆柱体等几何体进行研究,有时也将其等效为地形,并将其进行叠加。
胡志忠等将威胁源的最大作用范围形成的曲面包络等效为地形,并用击落概率数值作为系数进行修正。马云红等通过对地形栅格高程数据进行图形化处理来缩小搜索空间,将威胁在地形图上进行叠加来构成威胁场,将其转化成有向图来克服算法在求解时产生的维数爆炸问题。夏丛亮等对直升机低空突防航迹规划问题进行研究,将威胁区域等效为地形,用具有一定半径的圆柱体进行表示。熊自明等将地面火力和干扰威胁等效为近似山峰的地形威胁处理。
2.3 规划空间建模方法评述
综上可知,在突防航迹规划空间建模方面,当前研究延用传统方法较多,改进和创新较少。具体表现如下:
(1) 在地形空间建模方面,使用数据插值和平滑处理两种方法较多,对于将地形转化为灰度图像的方法使用较少。存在的不足: 虽在地形建模过程中考虑了地形对突防飞行安全的影响,尤其是在平滑处理时考虑满足作战飞机的机动性能要求,但就地形对威胁空间的影响考虑较少。
(2) 在威胁空间建模方面,常用方法大都理想地将威胁源视为规则的几何图形或者等效为地形进行叠加,存在的不足: 对威胁源在地形影响下存在遮蔽而形成盲区,但在威胁空间建模时对其通视性分析较少。同时,威胁源部署位置是通过假设确定的,在合理性方面缺乏检验和说明。
总的来说,突防航迹规划空间建模方面的创新难度较大,可创新的空间相对较小,但是在地形数据处理和威胁空间精确化表征方面,仍然有值得研究的内容。
3 突防航迹代价函数构造及航迹优化处理
突防航迹规划过程中,对生成航迹的评价常由航迹代价函数来表征。代价函数的构造也是规划中的重要一环,同时所得结果并非都能满足可飞要求,此时便需对其进行优化处理。因此,突防航迹代价函数构造以及航迹优化处理是突防航迹规划中不可或缺的组成部分。
3.1 突防航迹代价函数构造
突防航迹代价是对影响航迹性能的各项要素的量化和计算,其作为航迹规划质量的评价指标,在规划过程中通常被转化成代价函数并与规划算法紧密结合。突防航迹代价函数的构造主要考虑碰撞风险、 被发现和击落风险、 机动性能和航程等因素,遵循统一规则将其转化为无量纲指标,赋予对应的权重,以加权和的形式产生。常见的航迹代价函数可分为基于概率的代价函数和基于距离的代价函数两大类。
3.1.1 基于概率的航迹代价函数
基于概率的航迹代价函数通常是指将与地面碰撞的概率、 被探测概率和被击落概率作为代价指标所建立的航迹代价函数。
Asseo等建立了与敌地空导弹杀伤概率相关的代价函数,将其表示为已知地面防御场地俯角的函数。唐上钦等基于目标RCS对雷达实际探测距离的影响,建立了威胁代价函数。唐隆等选择突防时间和雷达探测概率两项指标,通过赋予权重值建立突防方向函数,从突防方向的角度出发,为关键节点确定提供了参考。Li等提出一种新的概率密度模型,将初始路径规划问题转化为数值问题,与传统的威胁圆几何模型相比,该模型更适用于计算处理。周一叶等依据势场理论构建基于势函数的威胁分布概率模型。李涵等对突防飞机被预警雷达发现概率和被敌火力击落概率进行计算,将概率模型作为航迹代价函数,对突防航迹进行求解。
3.1.2 基于距离的航迹代价函数
基于距离的航迹代价函数是指将航程、 与威胁源距离和与地面距离等作为代价指标所建立的航迹代价函数,其在突防航迹规划过程中应用较多,多以距离指标无量纲化后的加权和来表示。
Zardashti等基于数字地形高程数据(DTED)建立网络流模型,得到分层网络并将每条弧的代价函数定义为弧的长度。郝震等以航路距离、 平均威胁强度和飞行高度建立代价函数。Zardashti等结合航迹长度、 油耗和时间约束下的代价函数,获得从起点到终点的四维轨迹。
3.2 突防航迹平滑优化处理
通常情况下,借助算法寻优所得的突防航迹是以点按序相连形成的,其往往存在较为明显的拐点,这便使航迹的可飞性较差,因此,需对航迹进行平滑优化处理,使其可飞、 好飞。具体表现为航迹满足作战飞机的机动性能和任务要求,具有较高安全性且航迹代价较小。
Nikolos等将控制点坐标作为进化算法中的染色体基因,生成由较小B样条曲线相互平滑连接而成的三维航迹。Volkan等使用贝塞尔曲线来表示所得航迹,使其更为平滑。Wang和Yi等将生成的最优节点相连接得到航迹,采用B样条曲线对航迹进行平滑处理,使其更适合无人战斗机的飞行。贾正荣等在研究多机协同突防航迹规划问题时,基于分段保形二次插值方法生成航迹,并使用粒子群优化算法对控制点位置进行优化。吴文海等使用非均匀有理B样条平滑策略对静态和动态威胁环境下的三维突防航迹进行处理。
3.3 代价函数构造及航迹优化评述
综上,对于突防航迹代价函数构造及航迹优化处理问题,当前研究主要是将撞地、 被探测和被击落风险转化为航迹代价函数,或是综合考虑航程、 与威胁源距离和与地面距离等生成航迹代价函数,求解出突防航迹点序列,然后基于序列点进行平滑优化,生成最终突防航迹。
考虑到实际作战运用过程中,对于航迹规划科学性要求较高,基于距离的代价函数构造方法,其代价权重的确定缺乏物理意义,很难证明其合理性。因此,未来基于概率的突防代价函数构造是比较贴合实战的方法。同时,对飞行诸元进行过多调整会增加有人机飞行员操作负荷,影响其后续任务操作,而对无人机来说过多调整会增大实际航迹的偏离程度,存在误入威胁区域的风险。因此,在航迹优化处理方面,生成一条控制点少而航迹风险低的航迹,即在可飞的前提下又好飞,是一个重要的研究方向。
4 突防航迹规划优化算法
目前,已有的突防航迹规划算法较多,根据规划决策进行分类,可分为传统优化算法和现代智能算法两大类。现代智能算法又可分为进化算法和群智能算法。
4.1 基于传统优化算法的规划方法
传统的优化算法有A算法、 Voronoi图法、 人工势场法、 快速扩展随机树法(RRT)、 最优控制法、 动态规划法和梯度下降法等。
4.1.1 A算法
A算法最初由Hart提出,作为一种经典的航迹规划算法,以其稳定、 简单、 易实现的特点受到广泛应用。该算法以栅格化的规划空间为基础,将栅格线交点视作待选航迹节点。从规划起始点出发,通过建立代价函数和启发函数,在待选航迹节点集合中,逐步搜索最小代价节点并作为下一步扩展节点,直至到达目标点,其搜索是一种被选节点扩展的过程。
穆中林等针对威胁包络圆个数增加时产生的规划空间维数爆炸问题,提出基于分水岭分割的改进A算法。郝震等基于扩展节点缩减的A算法分别对单部雷达和两部雷达探测的情况进行三维突防航迹规划。胡晓赟基于改进A算法在雷达干扰资源分配的基础上对二维突防航迹进行规划。De Filippis等对传统A算法进行改进,提出可用于三维航迹规划的Theta算法。该算法减少了航迹的长度,避免了过多节点的生成,且其生成的路径平滑,避免了无用的高度变化。当遇到地形阻碍航迹延伸时,Theta能够利用更有效的节点扩展策略缩短搜索时间。郝秦芝等通过拓展搜索空间、 剔除无用节点和自适应步长搜索的方式,对传统A算法进行改进。周一叶等采用自适应步长的稀疏A算法对突防航迹规划空间进行高效搜索。刘大卫等也使用稀疏A算法对小型集群无人机三维突防航迹规划进行研究,在算法扩展节点中引入支配检测方法,使搜索效率得到提高。张哲等将无人机姿态角信息融入A算法的搜索节点中,采用多层变步长策略进行搜索并对航迹节点进行可行性判断。
4.1.2 Voronoi图法
Voronoi图作为计算几何中重要的图形之一,在地形区域划分方面得到广泛应用。在用Voronoi图进行突防航迹规划时,通常将障碍区或威胁区看作一个质点,则若干区域便可形成系列点集。在此基础上,通过增量构造法和Delaunay三角法等方法生成Voronoi多边形,其满足多边形每条边上的点到相应质点距离相等的性质。在规划时,借助图搜索算法获得从起始点到目标点的最短航迹。陈长林等针对航空兵突防作战航迹规划问题,基于作战想定概图,利用Delaunay三角剖分间接形成Voronoi图,结合突防航迹规划的一般步骤和方法,生成初始航迹; 同时,进一步分析了突发雷达威胁、 雷达威胁消除和威胁转移三种动态规划背景,并利用Voronoi图的特性对航线进行动态规划,生成新的最优航线。但是该方法缺少对于航迹的平滑处理,使得可飞性不足。
Voronoi图法得到的突防航迹通常只是可行航迹,而非最优航迹,且适用范围多为二维空间。当前,对于三维Voronoi图的研究也有一定的成果。刘雪娜针对三维点集Voronoi图的算法实现进行研究,为后续实际应用提供参考。虽然已有关于三维Voronoi图的研究,但其成果还未应用于航迹规划。其原因可能是在涉及三维航迹规划时,图的形式将更为复杂,很难获得较好的规划效果。
4.1.3 人工势场法
人工势场法最初是由Khatib提出,其将目标点和威胁源视作势力场,目标点产生牵引力,威胁源产生排斥力。目标点提供牵引速度,威胁场提供规避速度和与规避速度方向垂直的导引速度,规划出绕过威胁区域的最优航迹。该方法规划速度较快,且在动态航迹规划方面的适用性较好。
4.2 基于进化算法的规划方法
进化算法来源于达尔文“适者生存”的进化论原理,包含四个典型范式: 遗传算法、 进化规划、 进化策略和遗传程序设计。其通常以差分进化算法和遗传算法两种形式应用于突防航迹规划过程中。
4.2.1 差分进化算法(Differential Evolution,DE)
差分进化算法的基本原理与遗传算法类似,其主要通过个体向量间的差分、 求和生成新的个体,并通过交叉和选择保留符合要求的个体,以此实现寻优。
Peng等使用多智能体协同进化算法对多无人机低空突防的离线三维航迹进行规划。次年,其又对动态环境下的在线规划问题进行深入研究,在传统差分进化算法的基础上引入拓展后的冯·诺伊曼拓扑结构,编码时将绝对和相对坐标进行结合,在变异算子中加入最优解的差分项和基向量。吴文海等基于广义反向学习、 自适应排序变异和自适应权衡模型,提出改进的差分进化算法,对静态和动态威胁环境下的三维突防航迹进行规划。
4.2.2 遗传算法(Genetic Algorithm,GA)
遗传算法是模拟自然界遗传机理以及生物进化过程,通过基因的选择、 交叉、 变异等操作,实现对最优值的搜索。在突防航迹规划过程中,其可将作战飞机的性能指标,如最小飞行速度、 最大转弯角、 最大爬升率等信息以及航迹点集合信息编码到染色体中,通过染色体间的各类操作,使规划的航迹初始解逐渐向最优解靠近。
叶文等提出一种基于自适应伪并行遗传算法的优化方法,其将排序选择和最优保存引入选择环节,在交叉时采用两点交叉和单点交叉相结合的方式,并增加高斯算子变异方式,使算法在取得全局最优时保持较好收敛性。彭建亮等使用引入惩罚机制的遗传算法,对最优航迹方位偏转角序列进行求解。夏丛亮等在对直升机低空突防航迹规划问题进行研究时,将自适应变异和交叉概率引入遗传算法,对航迹进行求解。刘希等提出基于K-均值聚类遗传算法的规划方法,用极坐标下的航迹点序列表示航迹,并引入罚函数对不满足约束要求的个体进行惩罚,最终解算得到协同下的三维突防航迹。饶卫平等提出采用自适应交叉变异方式的多智能体遗传算法,获得较好的全局规划效果。李涵等基于最优保存策略和可变算术交叉,对遗传算法交叉和变异环节进行改进,并将个体与解空间的距离作为罚函数,求解被击落概率最低的突防航迹。
4.3 基于群智能算法的规划方法
群智能算法是根据具有自组织行为的智能群体在群体内部和与环境之间的相互作用关系和准则,总结提炼形成的算法。在突防航迹规划中应用较为广泛的群智能算法有蚁群算法、 粒子群算法和人工蜂群算法等。
4.3.1 蚁群算法(Ant Colony Optimization,ACO)
蚁群算法是受蚂蚁觅食行为而启发得到的一种智能算法,最初由Colorni提出。其采用正反馈机制,具有并行分布式计算能力,但容易陷入局部最优甚至是停滞不前,搜索时间过长,不适用于实时规划。
熊自明等针对使用传统蚁群算法进行航迹规划时易出现停滞的不足,把飞行的偏航角引入算法的启发信息并建立优先搜索集,提高了搜索质量和速度。欧阳志宏等使用引入目标诱惑机制的改进蚁群算法对突防航迹进行规划,并将理论成果进行了工程化的应用。张志伟等使用基于自适应信息素挥发的改进蚁群算法对航迹进行求解,工程可实现性较强。
4.3.2 粒子群算法(Particle Swarm Optimization,PSO)
粒子群算法于1995年由Kennedy等首次提出,与其他智能算法相比,具有操作容易、 参数少、 概念简单等优点。王鸿睿通过构建函数表达式的方式对地形和山峰的威胁进行模拟和等效融合,在粒子群算法中加入领域粒子选择策略来提高搜索效率,生成全局规划下的三维航迹。随后,黄国荣等采用自适应粒子群算法进行三维突防航迹的规划,得到较好的规划效果。
4.3.3 人工蜂群算法(Artificial Bee Colony,ABC)
人工蜂群算法是模拟蜜蜂行为而提出的一种优化算法。Xu等提出一种基于混沌理论的人工蜂群算法,利用混沌变量的遍历性和不规则性使传统人工蜂群算法能够跳出局部最优,同时加快了寻找最优参数的进程。该算法也可用于应对动态环境和突发威胁时的无人机作战飞机突防航迹规划。Li等采用人工蜂群算法对航迹进行求解,在二维规划空间的适用性较好。
4.3.4 灰狼优化算法(Grey Wolf Optimization, GWO)
灰狼优化算法是由Mirjalili等于2014年提出的一种新的群智能算法,其对灰狼群的捕食行为进行模拟,并通过群体间的协作机制来实现最优化。
Zhang等提出将灰狼优化算法应用于无人作战飞机二维突防航迹规划问题。以安全和消耗最少燃料为目标,使用灰狼优化算法对最优节点进行选择,连接选定的二维坐标节点来获得航迹。在与其他6种常用算法进行对比后得出该方法的求解效果更优。
除上述几种常用群智能算法被用在作战飞机突防航迹规划上外,还有诸如蝙蝠算法、 飞蛾扑火算法和帝王蝴蝶优化算法等,都展现出较好的规划效果。
4.4 算法对比总结
在前人研究的基础上,对突防航迹规划算法进行梳理和总结。为直观、 清晰地表现不同优化算法的优劣差异及适用条件,将其典型算法进行对比分析,如表1所示。
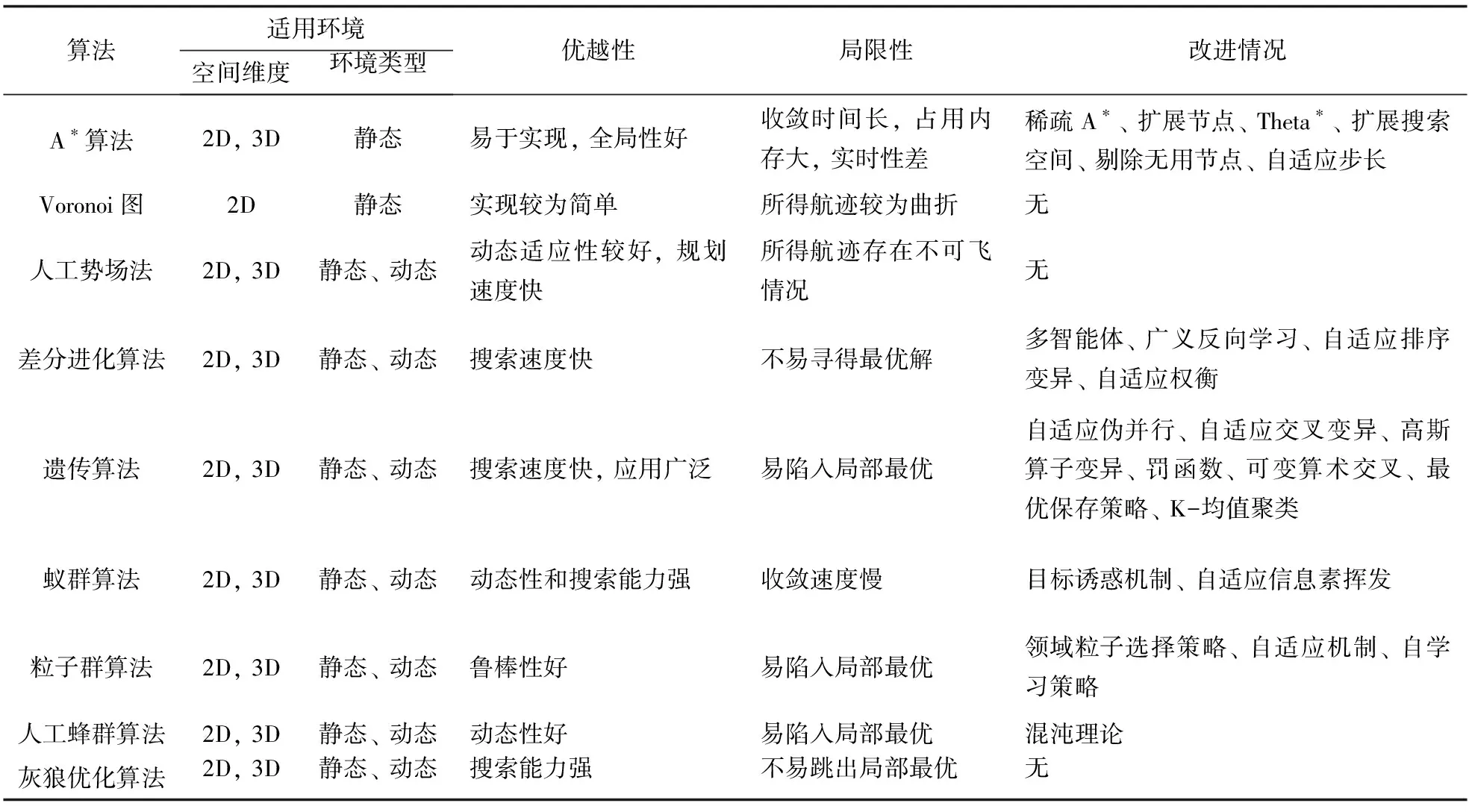
表1 典型优化算法对比分析
由表1可知,在算法的使用范围和性能方面,进化算法和群智能算法较传统优化算法有更大的优势。而传统算法,诸如A算法和Voronoi图法等大多在二维航迹规划问题上有较好的效果。然而,在对突防航迹规划问题不断深入的研究中,其逐渐呈现出高维、 非线性、 离散连续变量混合和多目标等特性,传统算法很难有效应对。而进化算法和智能算法在三维和动态航迹规划中有着较快的求解速度,但不同于传统优化算法在模型上的普适性,其往往受限于特定的模型,当模型发生改变时便需要重新调整相应的参数。
5 面临的挑战与未来发展方向
随着雷达技术和地面防空武器性能的不断提升,战场环境日趋复杂和不确定,作战飞机突防面临着严峻的挑战,这也使得未来对突防航迹规划的要求越来越高。
5.1 面临的挑战
通过对前人成果进行分析,可得出当前对突防航迹规划方法研究具有侧重算法研究多、 规划模型研究少和侧重预先规划研究多、 实时规划研究少的特点。突防航迹规划方法研究在规划空间建模、 代价函数构造和优化算法选择三个方面依然面临着挑战,其具体表现如下:
(1) 规划空间建模问题。突防环境复杂化使得在预先规划过程中,需要考虑的要素更多,计算量更大,各要素间的相互权衡难度增大; 同时,不确定因素对突防任务影响也越来越大。如何在规划空间建模时将不确定因素的影响进行表征,是当前面临的难题之一。
(2) 代价函数构造问题。当前通过选择代价指标并将其加权和作为航迹代价函数的方法缺少实际的物理意义,难以进行合理性的说明,存在较大主观影响。因此,如何科学构造航迹代价函数并增强其准度是又一难题。
(3) 优化算法应用问题。传统算法的求解准度和在二维规划空间求解的普适性较好,但是在三维规划空间的速度较慢且大都不适用; 而现代智能优化算法的种类多样,求解速度快,在三维规划空间的适用性也较好,但其结果存在随机性,准度不确定。设计和改进出同时具备较优求解准度和速度的算法也是当前面临的挑战。
5.2 未来发展方向
随着组网雷达的运用和低空补盲雷达的使用,体系化、 立体化的对空探测能力将大大提升。各类地面机动防空作战力量的使用,使得突防环境更加具有动态性和不确定性。在这些因素的影响下,单一作战飞机突防的难度将越来越大,同时使得航迹规划的难度也越来越大。从突防作战样式角度出发,未来突防样式将以协同突防为主,协同突防可包括有人机-无人机的协同突防和多无人机的协同突防等。因而,突防航迹规划将向协同突防航迹规划方向发展。鉴于此,结合当前面临的主要挑战,对未来突防航迹规划方法研究大致聚焦在以下方面:
(1) 不确定和复杂突防规划空间建模。对于不确定因素的影响进行表征,并将其融入到规划空间建模中; 考虑地形遮蔽、 目标RCS值和信息融合方式对雷达实际探测能力的综合影响; 同时,对雷达位置部署规则和方法进行分析,建立贴合实际战场环境的规划空间模型。
(2) 协同突防样式下的航迹规划。对多机协同突防时在时间、 空间和任务方面的协同要求进行建模; 同时,区分不同的机型编组,如同构多无人机编组协同、 异构多无人机编组以及有人机和无人机编组协同突防时不同特点和任务分工。将任务分配和航迹规划相结合,考虑预先和临机两阶段的规划,制订航迹规划流程,并设计满足协同要求的代价函数和规划算法。
(3) 兼顾求解准度和速度的算法设计和改进。当前的突防航迹规划算法种类繁多,各有其优缺点,如何综合多种算法的优势,对其进行融合改进而得到既能满足航迹规划速度要求,又不以降低准度为代价的新算法,这也是下一步研究的重点。例如引入目前较热门的机器学习算法,对经典算法进行改进和提升。
猜你喜欢
航空学报(2022年9期)2022-10-14
火力与指挥控制(2022年8期)2022-09-16
现代计算机(2022年3期)2022-04-22
数理化解题研究·综合版(2021年11期)2021-12-22
小学教学研究(2021年5期)2021-09-29
课程教育研究(2021年27期)2021-04-13
初中生世界·九年级(2020年2期)2020-04-10
语文世界(初中版)(2018年10期)2018-11-06
语文世界(初中版)(2017年5期)2017-06-22
作文与考试·初中版(2017年12期)2017-04-19