
考虑主客观因素的自动紧急制动系统综述
2022-10-08 11:41马宽旺
汽车文摘 2022年10期
马宽旺
(重庆交通大学 机电与车辆工程学院,重庆 400074)
主题词:自动紧急制动(AEB)控制策略智能底盘驾驶风格车辆属性道路附着系数中图分类号:U461.3 文献标识码:A
缩略语
ADAS Advanced Driver Assistance System
Euro NCAP The European New Car Assessment Program
AEB Autonomous Emergency Breaking
HMI Human Machine Interface
NHTSA National Highway Traffic Safety Administration
TTC Time To Collision
EMB Electrical Mechanical Brake
EHB Electrical Hydraulic Brake
V2V Vehicle to Vehicle
ESC Electronic Stability Control
1 引言
近年来随着国民经济和汽车产业的蓬勃发展,中国汽车市场保有量正在稳步上升,截止到2021年底,中国汽车保有量已经达到3.95亿。由于汽车保有量的不断提升,交通中车辆追尾事故造成的人员伤亡量也在逐年增加,据世界卫生组织的报道,道路安全事故已经成为人类第三大杀手。为了保护驾驶员和乘员安全,减少追尾事故的发生,作为高级辅助驾驶系统(Advanced Driver Aissitance System,ADAS)主动安全功能之一的自动紧急制动系统(Autonomous Emergency Breaking,AEB)日益受到各国政府和汽车安全评价机构的高度重视。Euro NCAP的样本研究表明,搭载AEB系统的车辆能够避免约38%的碰撞事故,最大程度上减少事故的发生并保护驾驶员、乘员全和行人安全。
AEB系统由3部分组成:外部感知、决策控制和执行单元。AEB通过外部雷达或者摄像头传感器来对前方目标车和行人进行检测,当系统识别出目标车和行人处于程序设定的碰撞等级临界点时,人机交互界面(Human Machine Interface,HMI)会发出声音和图像信号预警信号,然后紧急制动来避免追尾。
本文将从影响AEB的4个主要因素:驾驶风格、车辆属性、道路条件和行驶环境,分析AEB控制策略技术发展历程和目前技术应用现状。为更好地推动AEB在汽车新产品上应用,提出未来AEB系统控制策略应增加主、客观因素协同,结合高精地图、V2X和智能底盘先进技术,提升整个AEB系统的适用性,来应对日益复杂的交通环境,进一步提升驾乘人员和行人安全性。
2 AEB控制策略发展
2.1 典型控制策略
AEB功能能够在实际交通条件下发挥最大的作用主要取决于AEB系统所采用的控制策略。在AEB发展和应用初期,零部件供应商和主机厂主要应用安全车间距控制策略和碰撞时间控制策略,这2种控制方式主要从“距离”和“时间”2个维度对车辆行驶时所面对的碰撞工况进行判断。
马自达(Mazda)、本田(Honda)和美国高速公路管理局(NHTSA)都提出了自己的AEB控制策略,这些公司和机构都是以“距离”一个维度来判断车辆的安全状态,建立简单的运动学模型进行分析得出理想化的AEB控制策略和碰撞状态。在建立运动学模型时忽略了主要的主、客观影响因素,如驾驶员的驾驶风格、车辆属性、道路条件和行驶环境这4个主要影响因素。针对4个影响因素的诸多参数,车企和汽车评测机构通过大量的反复试验得了出大量的经验数据。一般驾驶员从发现要发生碰撞到踩制动踏板的反应时间通常在0.2 s到2.0 s,制动管路的增压延迟时间为0.2 s。尽管各评测机构都做出了大量的参数量化标准,但未考虑到驾驶风格、车辆属性、道路附着系数和行驶环境之间的协同关系,导致AEB功能在实际的行驶工况中表现不佳。
大量驾驶试验表明驾驶员对碰撞时间最为敏感,于是将碰撞时间作为AEB的评价指标。美国宾夕法尼亚运输与交通安全中心的Hayward首次提出了碰撞发生时间(Time To Collision,TTC)的概念,将碰撞时间(相对距离除以相对车速)作为AEB评价指标。当本车和目标车的距离较小,相对车速为0时,则碰撞时间趋近无穷大,此时本车的AEB则不会起作用。Goelingh对原有的碰撞策略进行了修正,提出了二阶控制策略。Fancher提出了碰撞时间倒数策略,采用了渐近效应算法。
Lee基于真实驾驶员经验数据对Mazda、Honda和NHTSA提出的安全距离避撞策略和碰撞行车安全性2个方面进行评价,从数据分析得出的安全距离模型在行车安全性方面具有优良表现。典型控制策略特点如表1所示。

表1 典型控制策略
2.2 融合算法控制策略
为了改善AEB典型控制策略,克服AEB典型控制策略不足,幸佳庚提出了考虑道路附着系数的安全距离算法和时间碰撞算法的融合,并进行了融合算法优化,使本车与目标车辆保持在安全范围之内,同时能够对驾驶员进行分级预警,在预警时段采用典型控制策略的算法,当车辆进行制动阶段时,则用安全距离算法和进行融合,融合过程如图1所示。在安全距离结合的算法中二者进行先后判断,当2车的相对距离大于2车的最小安全距离时,启用时间碰撞算法,在感知信息处理之后,通过值来进行判断是本车继续行车,还是进行分级预警再进行紧急制动。

图1 融合算法制动过程
AEB控制策略和融合算法控制策略应用较为广泛,但是也未考虑驾驶风格、车辆属性、道路条件和行驶环境因素对AEB功能的影响,所以AEB控制策略仍然有待改进和优化。
3 驾驶风格的个性化
由于驾驶员的驾驶风格各异,使驾驶风格在人、车、路环境中处于最主观和最复杂的地位,因此驾驶风格对于改善AEB控制策略具有至关重要的意义。张永刚认为未考虑驾驶员个体差异,控制策略为理想状态模型,可能会导致AEB系统的误预警和误制动。何仁提出目前的AEB控制策略较为保守,着重于安全性,却牺牲了纵向平顺性。权衡二者之间的关系,需要更加灵活的主动制动方式来提高驾驶时的行车安全性和车辆的纵向平顺性。刘永涛提出了驾驶员特性,包括驾驶员的生理特性、经验属性相对稳定的静态特性和相对不稳定的动态特性。其中静态特性是指驾驶员长期的车辆操纵习惯,动态特性是指驾驶员的驾驶意图与不规范操作,驾驶员特性会对驾驶员采取制动反应时间造成极大的影响,同时也会影响AEB在紧急情况的介入时机。通常驾驶员自身的静态特性会对驾驶风格起着决定性作用,不同驾驶员的静态特性也不同,这会对AEB控制策略的可靠性和安全性提出了极大的挑战。WANG等提出一种基于不同的驾驶员反应时间和操纵习惯的碰撞预警算法,能够满足了大部分驾驶员的驾驶风格。姜顺明提出了驾驶状态识别系数,并对驾驶员进行了分类,分别是激进型、标准型和保守型,并且将驾驶状态识别系数用于修正AEB控制策略的最小安全距离。通常驾驶员的驾驶状态也会随着时间发生变化,AEB的控制策略也要做出相应的自适应调整,这样有利于改善AEB控制策略自适应性和可靠性。
驾驶员的动态特性通常表现为驾驶员本身的制动反应与判断能力。驾驶员的操纵熟练程度不同,制动反应时间也会不同。驾驶员的驾驶经验会影响驾驶员本身对复杂道路交通状况的判断和决策。Khashbat提出了驾驶员制动反应时间与驾驶经验和年龄相关,通过数据的统计与分析完成了相应的模型建立,提出了驾驶员的反应时间与驾驶经验和年龄之间的相关关系,即若驾驶员年轻且经验丰富,则制动反应时间越短(表2),驾驶员的驾驶风格个性化影响AEB控制策略的制定,同济大学的李霖等对驾驶员进行紧急制动的行为进行了分析,并采用相应的拟合方法提出了时间倒数碰撞法的行车危险估计等级算法。对于驾驶员的动态特性,大多数的研究者都是从制动反应时间来入手,对于驾驶员的驾驶状态研究较少。驾驶员行为若存在酒驾和疲劳驾驶以及其它一些不规范操作的话,不仅会影响驾驶员本身的制动反应时间,还会对AEB控制策略的介入造成一定的干预。因此,未来可以使用机器学习的方法对驾驶员的制动时间和制动力,进行大量的数据统计和机器自学习和修正,计算出相对合理的AEB介入时刻。全面分析驾驶员的驾驶风格,选择合适AEB控制策略对降低道路安全事故有着重要的意义。

表2 不同驾驶经验和年龄的制动反应时间 ms
4 车辆属性的差异化
4.1 外部感知特性
车辆属性是指车辆的外部感知特性和结构特性,感知特性和结构特性为车辆AEB系统中的软件和硬件部分。感知特性与雷达、摄像头的种类及传感器相互间的感知融合算法有着极大的关联性,同时也和雷达或摄像头的布置位置和设置的检测角度息息相关,这些都会对AEB控制策略产生一定的影响。当前的摄像头与雷达融合的感知仍然面对着许多的难题,为了进一步突破感知融合的限制,使用高精度地图结合雷达与摄像头进行高度融合来达到精准识别目标物体,更好发挥AEB的作用。随着智能网联技术与车辆AEB控制系统交互,本车可以获得前方目标车的位置信息,大幅度提高了车辆的感知水平,并突破了传感器自身的局限性,同时也增进了AEB功能的可靠性和安全性。
4.2 结构特性
车辆的结构特性由自身的机械结构所决定,包括车身的总尺寸、整备质量、轴距、前悬、后悬、离地间隙、质心位置结构参数。通常商用车设计上总体尺寸大、整备质量大、质心高度高,车辆在紧急制动时容易发生侧滑和侧翻的危险状况。因此对于商用车而言,应用AEB功能的意义远大于乘用车。影响车辆结构特性的结构参数对车辆的制动特性也有着非常重要的影响,一般情况商用车和乘用车会采用不同的制动器形式和制动方式,乘用车的质量较小,则采用液压制动,而商用车的质量较大,需要采用气压制动的方式。商用车和乘用车的结构特性不同,制动时的延迟性也会有差异,商用车和乘用车采用AEB控制策略也会有所区别。随着线控制动技术的发展,有效地解决了制动延迟性的问题,线控制动系统使用电信号来替代液压或者气动制动管路系统,对控制器进行信号输入,来操纵电控元件,改变制动力。线控制动的实现方式主要有2种,分别是电子机械制动系统(Electrical Mechanical Brake,EMB)与电子液压制动系统(Electrical Hydraulic Brake,EHB),如图2所示。随着线控制动技术逐渐成熟,会大幅度提高AEB的响应速度与策略的控制精度,更加能够提高商用车与乘用车的主动安全性。朱恩利等提出线控制动系统在车辆上的应用方案,验证了基于线控制动系统AEB系统比传统ESC系统的制动压力控制与响应能力更强。未来随着更加先进的制动系统出现,基于先进制动系统的AEB能达到低延时、快响应,最大程度提高AEB的整体性能。
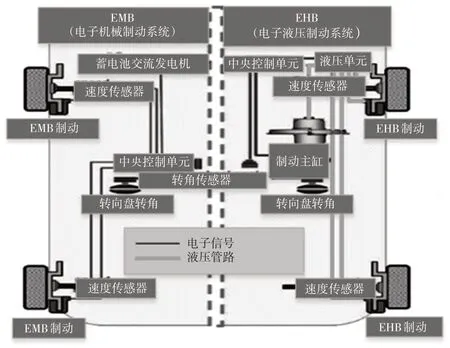
图2 EMB与EHB的结构
5 道路条件及行驶环境的时变性
5.1 道路条件时变性
道路附着系数和制动减速度都会随着路面条件的变化而产生相应变化,车辆在行驶的过程中所接触的路面类型不同,车辆在路面最大附着力也会随之改变,图3是不同路面的路面附着系数。在AEB控制策略中,通过雷达和摄像头的感知融合算法,计算出两车的相对车距与相对车速,但系统无法计算出本车和目标车辆的最大制动减速度。在当前的AEB控制策略中,没有将道路附着系数考虑到整个控制策略之中,在AEB的算法中将路面附着系数一般设置为常数值,未考虑道路条件的时变性,这就造成AEB在某些道路上会发生失效,如车辆在低附着路面上会发生滑转,加大制动距离,在高附着路面上制动次数频繁,影响了车辆的纵向行驶平顺性。为改进AEB功能的可靠性,常群等提出了使用无迹卡尔曼方法,对路面附着系数进行估算,模仿多类型道路安全距离模型。朱冰等提出基于最小二乘法与斜率法对路面附着系数进行估算,制定出基于路面附着系数估计的自适应汽车纵向碰撞预警策略。Kyongsu等提出轮胎路面模型估算道路附着系数,能够适应车辆在不同路面的最大制动减速度。Sevil等在考虑不同坡度道路条件,提出了轮胎-路面附着系数来适应碰撞预警和紧急制动适应算法。Pyun等提出道路特征、道路状况和天气状况控制参数子集,并用神经网络识别道路条件来确定路面附着系数。路面附着系数估计的精确程度影响AEB系统的安全距离评价指标,通过车辆动力学建模的间接计算、神经网络识别、修正算法获得的道路附着系数都具有局限性,AEB系统的实时性和精准性亟待提高。

图3 常见路面附着系数分布
5.2 行驶环境时变性
行驶环境对AEB系统的检验是AEB评价标准的重要组成部分。典型AEB系统主要针对车辆在水平道路行驶时的追尾状况进行响应,而在真正的行驶环境中会面对很多交通状况,包括十字路口、坡道、弯道、直线巡航跟车的交通工况。此外,目前AEB系统对于目标车辆突然换道行驶和有非机动车和行人突然插入车辆前方这种行驶环境,进行紧急制动的效果欠佳。Kim等通过搭建车辆模型和轮胎模型来对坡度进行预测,并提出根据不同坡度来制定AEB控制策略,进行自适应调整。当车辆行驶至弯道或者环岛时会出现目标识别错误,从而导致AEB的误报警和误启动。马玉喆等为了解决弯道行驶时AEB系统的非正常响应,提出对目标车辆进行位置补偿,判断目标车辆是否与本车处于同一弯道,并基于制动过程与危险系数来设计多级预警,实现了弯道行驶环境下有效避撞。胡延平针对十字路口这种行驶工况,分析了本车与目标车的位置关系,进行碰撞域等级划分,通过分析本车自动紧急制动后的停车位置与碰撞域的位置关系,来检测避撞效果。在实际水平道路的跟车巡航的行驶环境下,制动系统具有延迟性,本车与目标车很容易发生追尾。Shin等在常规驾驶员模型下,通过对前、后方目标车辆进行预测,提出了一种兼顾前、后方目标车辆的AEB碰撞策略。在整个AEB系统中,感知信息一般只能靠雷达或者摄像头获取,目标信息捕捉不完整,未来随着5G通信技术结合车联网和高精度地图发展,能够获得更多目标信息,使车辆在复杂的行驶环境中能够识别目标更加精准,进一步提高AEB系统的有效性。
6 结论
本文分别分析了AEB系统的典型控制策略在实际驾驶环境中的优缺点,提出未来AEB系统的控制策略应考虑多项主客观因素协同。在以上基础上,得出如下结论:
(1)驾驶风格、车辆属性、道路条件和行驶环境的时变性对AEB控制策略产生明显影响,只考虑单个因素不能适应当前AEB系统多样性的场景需求。
(2)考虑多项主客观因素协同的AEB控制策略,更能适应不同的交通场景变化,大大地提高了AEB系统的行车安全性和纵向舒适性。
(3)结合V2V、智能底盘、高精度地图技术,提升整个AEB系统的适用性,来应对日益复杂的驾驶环境,并保护驾驶员和乘客具有重要的作用。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
茶道(2022年3期)2022-04-27
汽车实用技术(2022年4期)2022-03-07
内燃机与配件(2022年2期)2022-01-17
中学生数理化·高一版(2021年11期)2021-09-05
电机与控制学报(2018年9期)2018-05-14
娃娃乐园·3-7岁综合智能(2017年9期)2018-02-01
娃娃乐园·3-7岁综合智能(2017年8期)2018-02-01
娃娃乐园·3-7岁综合智能(2017年7期)2018-02-01
CHIP新电脑(2017年6期)2017-06-19
