
基于机器视觉系统的机械手设计*
2022-10-03 04:56黄志辉彭辰晨曹丽芳
南方农机 2022年19期
张 元 , 黄志辉 , 彭辰晨 , 曹丽芳 , 邹 杰 , 焦 祥
(无锡职业技术学院,江苏 无锡 214121)
1 研究背景
零件分拣系统因运作平稳性、高效性以及安全性等突出性能,已经成为现代工业生产中不可或缺的一部分,被广泛应用于各种物料分拣的场合,甚至逐渐被应用于一些工作环境危险的行业,如军工、火电等行业,从而保障工作人员的安全[1-2]。手爪作为零件分拣系统中最后的执行部件,是一个功能和系统高度集成部件,整个手爪的设计涉及多个学科知识内容。手爪的种类有很多,从工作原理以及机械结构的角度对手爪的类型进行分类,如图1所示[3-5]。

图1 手爪的分类
目前广泛使用的手爪都是基于各种机器人的,其工作原理也比较简单,一般是由计算机发出指令,由机器人的手臂带动机械手达到示教位置,即零件所在位置,然后再控制机械手手爪去夹持零件,接下来就是从A点到B点的搬运工作,周而复始[6-7]。这种模式夹持分拣零件存在的缺点:每个手爪夹持的零件都是固定的大小或者形状,抓取不同特征的零件时需要不同的手爪来完成,当在搬运或者其他工作过程中需要更换其他种类零件时,就需要通过机器人的行程控制,使机器人再到指定的位置更换手爪,正如数控机床作业中的换刀一样,这样会浪费不少时间,不利于提高生产效率。为了满足手爪对不同形状特征零件的抓取,同时可以快速地更换手爪,节约时间,课题组基于机器视觉系统,从概念结构上简单地设计一款多功能机械手,根据分拣零件的特征,该机械手可以方便快捷地自动切换手爪。
2 建模设计
课题组设计的机械手的主要载体部分也是普通的机器人,机器人的主体部分由底座、大臂、小臂和手腕等组成[8-9],在机器人的手臂末端设计并安装多功能夹爪,其主要组成结构图如图2所示。
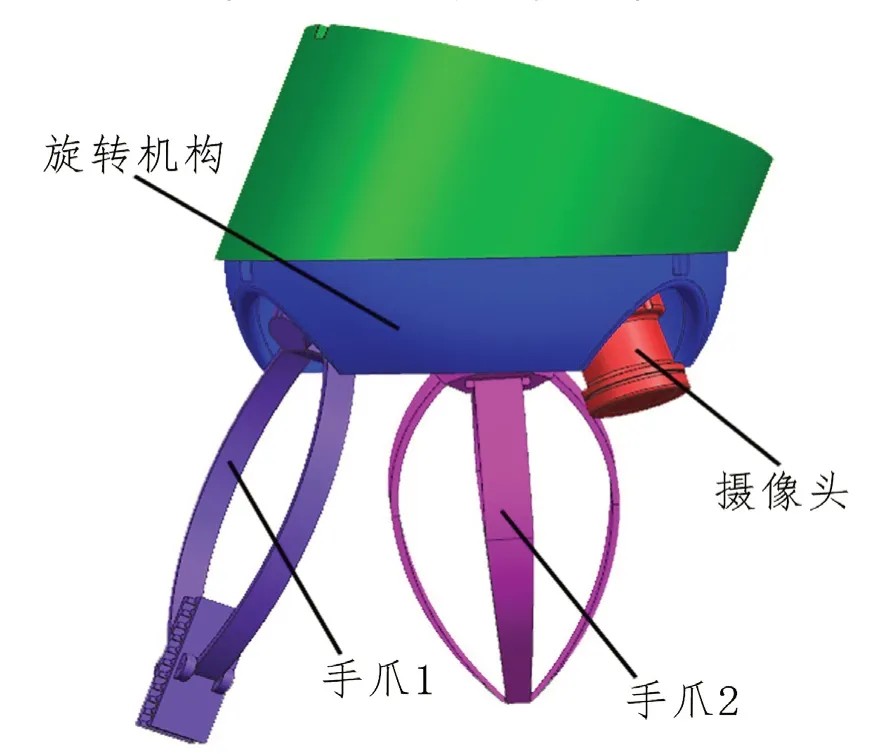
图2 硬件组成框架结构图
课题组设计的机械手主要由旋转机构、摄像头以及手爪三部分组成。旋转机构的作用是方便快捷地切换手爪1、手爪2和摄像头,机械手上设计了两种不同形状的手爪,便于根据需求进行切换,满足不同形状特征零件的抓取。其工作原理如下:机械手通过机器人手臂移动到工件待抓取的位置,摄像头对抓取工件进行图像识别,从而选择合适的手爪进行抓取,如果待抓取工件上有两个可夹持的平面的特征,则由旋转机构将手爪1旋转到抓取位置;如果待抓取工件是球体特征,则由旋转机构将手爪2旋转到抓取位置。该机械手整体设计简单,所有结构的建模都是在NX12.0软件中进行,如图3所示。
手爪1夹持不同零件的示意图如图4所示,手爪2夹持不同直径球体的示意图如图5所示。
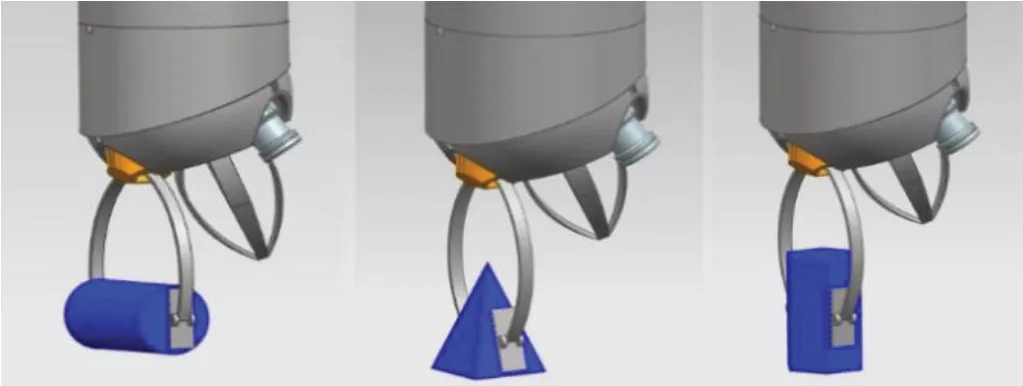
图4 手爪1工作示意图

图5 手爪2工作示意图
3 机构的运动仿真
机构的运动仿真是在NX12.0软件中完成的,机器人的运动和机械手的运动有先后顺序,而且每个杆件的运动都存在间歇性,所以在这里的驱动体定义,基本采用step函数来完成。杆件之间的运动比较多,这就涉及了很多step函数[10],具体设置又需要完全配合分拣搬运的流程,整个分拣搬运轨迹流程、时间以及step函数驱动的设置如下。
1)初始位置:初始位置为机器人处于停止非工作状态时所处的位置,由机器人本身决定。
2)机械手移动到零件正上方(3 s):机器人将机械手移动到零件正上方,同时摄像头处于工作位置,从而进行视觉识别。底座与大臂的运动函数STEP(x,0, 0, 3, 60),大臂与小臂的运动函数STEP(x, 0, 0, 3,40),小臂与手腕的运动函数STEP(x, 0, 0, 3, -30),手腕与机械手的运动函数STEP(x, 0, 0, 3, -20)。
3)旋转机构转动(1 s):经过识别,旋转机构转动,选择合适的手爪,旋转机构运动函数STEP(x, 0,0, 3, -120)。
4)抓取零件(1 s):机械手向下运动,同时手爪闭合夹紧零件,大臂与小臂的运动函数STEP(x, 4,0, 4.5, 5),小臂与手腕的运动函数STEP(x, 4, 0, 4.5,-5),手腕与机械手的运动函数STEP(x, 4, 0, 4.5, 15),两个夹爪闭合的运动函数STEP(x, 4.5, 0, 5, -25)。
5)机械手移动到收纳盒正上方(3 s):底座与大臂的运动函数STEP(x, 5, 0, 8, -180),大臂与小臂的运动函数STEP(x, 5, 0, 8, -60),小臂与手腕的运动函数STEP(x, 5, 0, 8, 45),手腕与机械手的运动函数
STEP(x, 5, 0, 8, 20)。
6)放置零件(1 s):手爪张开,放下零件,两片夹爪张开的运动函数STEP(x, 8, 0, 9, 25)。
7)回到初始位置(1 s):底座与大臂的运动函数STEP(x, 9, 0, 10, 120),大臂与小臂的运动函数STEP(x, 9, 0, 10, -45),小臂与手腕的运动函数STEP(x, 9, 0, 10, -15),手腕与机械手的运动函数STEP(x, 9, 0, 10, -15),旋转机构的运动函数STEP(x,9, 0, 10, 120)。
抓取一个零件的时间周期约为10 s,因此可以定义求解时间为11 s,其运动轨迹流程如图6所示。中间的为初始位置,每分拣抓取一个零件就循环执行一次这样的流程。
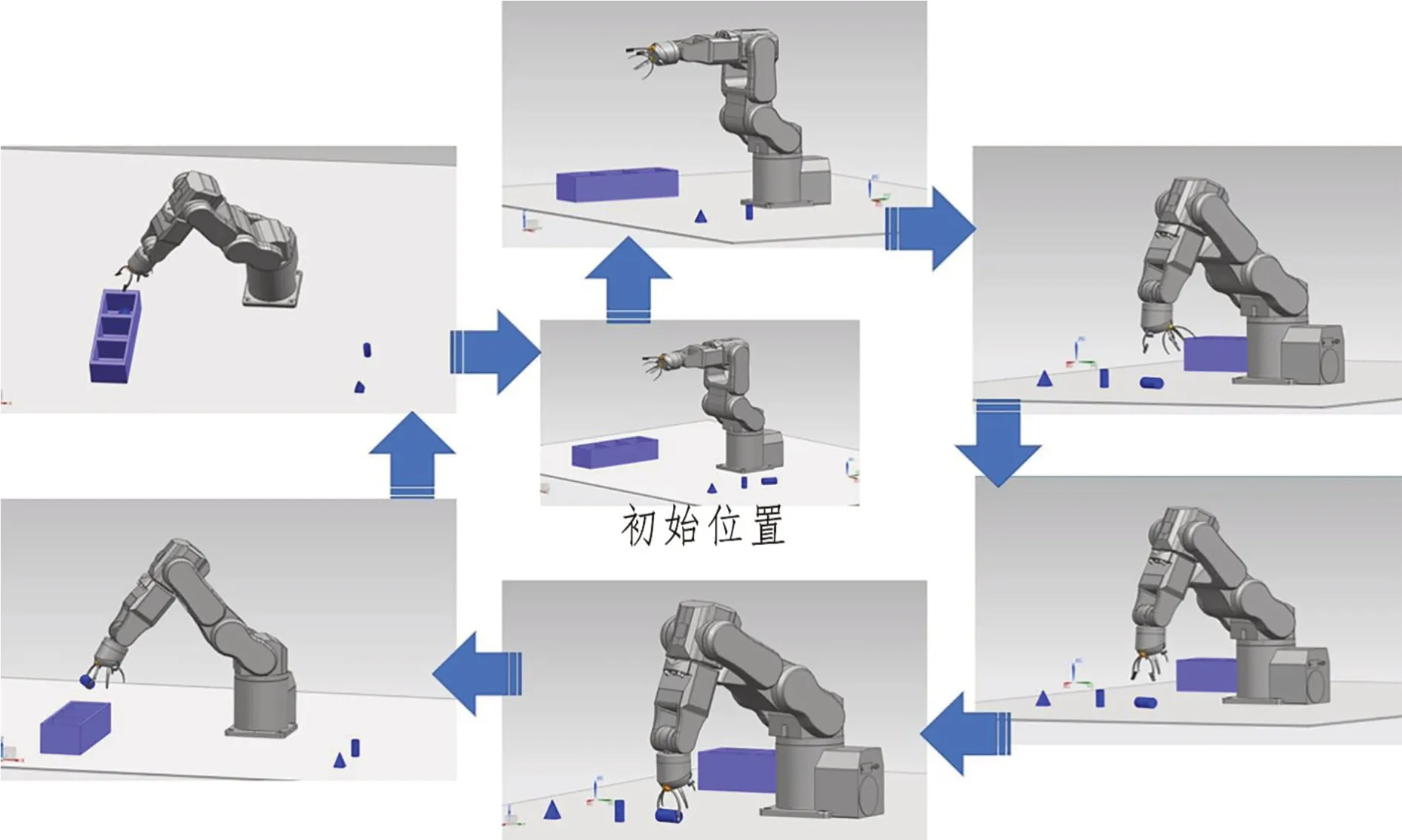
图6 运动仿真轨迹图
4 结论
课题组通过NX12.0软件设计并建模了机器视觉系统中分拣机械手,并以此为研究对象,以典型零件为夹持案例,对机器人识别零件、切换机械手爪、夹持过程以及搬运过程进行了运动仿真。仿真结果表明:结合了视觉识别零件特征,机械手可以自动选择合适的手爪进行抓取,无需再到指定位置旋转手爪,节省了时间,运动仿真结果从理论上验证了该方案的可行性。不过课题组只是设计了视觉与机械手分拣抓取零件的三维模型,还未对所有控制元器件都进行详细的规划与控制,因此最终要完成实物的生产,还需要做很多的工作。
猜你喜欢
包装与食品机械(2021年5期)2021-11-06
机电工程技术(2021年3期)2021-09-10
家庭百事通·健康一点通(2020年11期)2020-11-30
商品与质量(2020年35期)2020-11-06
电子制作(2019年13期)2020-01-14
环球时报(2019-07-18)2019-07-18
现代职业教育·中职中专(2018年7期)2018-05-14
载人航天(2016年4期)2016-12-01
科学时代·上半月(2013年6期)2013-08-22
少林与太极(2011年8期)2011-11-17
