
灌木幼苗移栽机的抓送苗机构设计*
2022-10-03 04:56赵美卿
南方农机 2022年19期
李 瑾 , 赵美卿 , 张 燕
(1.山西工程技术学院机械工程系,山西 阳泉 045000;2.东关小学,山西 吕梁 033000)
很多植物的栽培过程中都用到了移栽机[1-2],在种植灌木的过程中,需要将已经培育好的幼苗移栽到大田里以提高生产率[3-4]。针对移栽作业费工、费事的问题[5],已有研究设计出了专用灌木幼苗移栽样机,该机器可取代大部分人工作业,但其人机工效需进一步提升。基于此,课题组在灌木幼苗移栽机现有结构的基础上,设计了抓送苗机构以提升人机效率。
1 抓送苗机构的设计
目前,已有的灌木幼苗移栽机主要由开沟机构、种苗机构、覆土机构组成。随着移栽机的发展,开沟机构能够在移栽机底部的田地上开出适宜深度与间距的种苗沟。滚动式种苗机构主要由滚筒上若干圈可开闭的链夹构成,滚筒随移栽机移动而转动,滚筒上的链夹运动到滚筒顶部时张开,接收幼苗后夹紧,设计链夹运动到滚筒最底部时,在滚筒切线方向上链夹与地面相对等速,此时链夹将幼苗无损送入种苗沟中,同时覆土机构进行覆土将幼苗固定,完成移栽过程。由于灌木幼苗长度小,滚筒上的链夹在种苗时需贴近地表,受其质量及动力限制,滚筒直径不能过大,导致滚筒顶部链夹张开接收幼苗的位置不高。若使用人工送苗,为达到幼苗移栽小行距、高密度及无漏栽的要求,需要人工长时间弯腰持续将幼苗放入链夹内以保证夹紧幼苗,导致人工劳动强度大。基于此,课题组在种苗机构上方设计了自动抓送苗机构以提升送苗效率、减轻人员的身体劳损。
常用的取苗方式主要有顶出夹取式、插入夹取式、气吹式等[3],本自动抓送苗机构属于插入夹取式,其结构如图1所示。该机构包含若干个共轴的抓苗架,与下方的种苗机构链夹圈一一对应。每个抓苗架上等间距安装有4个幼苗握爪,幼苗握爪接近前上方的放苗筒时张开,放苗筒中人工已插入分拣好的幼苗,握爪通过放苗筒后闭合以抓取幼苗根部,握爪的内侧设计成张拉有弹性支撑层的凹槽以避免伤害幼苗根部,握爪在运动到下方种苗机构滚筒上的链夹时再次张开,将幼苗上部投递给链夹后夹紧,完成一次抓送苗动作。在抓苗架的中心安装凸轮以精确控制握爪开合,抓苗架的结构简图如图2所示。

图1 移栽机抓送苗机构结构图
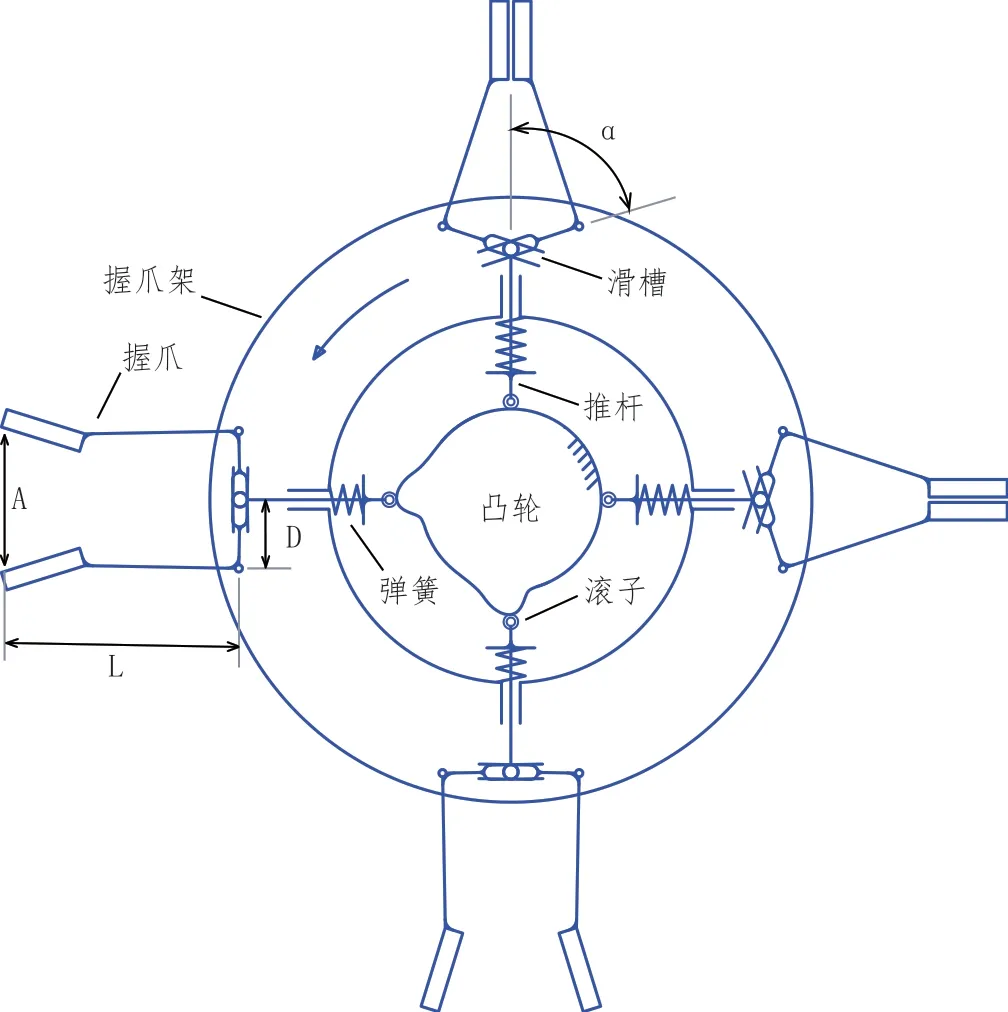
图2 抓苗架结构简图
图2中位于中心的凸轮为固定件,握爪架绕凸轮轴心顺时针转动,凸轮推动握爪后部的滚子推杆运动,利用弹簧构成力封闭机构使推杆滚子与凸轮保持接触,推杆另一端驱动滑槽使握爪开合。如图1所示,凸轮转动一个周期,握爪需要开合两次,分别为从放苗筒取苗及将幼苗放入链夹中,两个开合位置对应的凸轮行程具有约90°相位差。设凸轮的推程为S,握爪的张开尺寸为A,握爪手指转动的转轴与凸轮推杆间的偏距为D,握爪手指长度为L。当握爪闭合时,S与A都为0,设此时握爪滑槽与推杆之间夹角为α,则A与S之间的关系如式(1)所示。

2 B样条曲线运动规律
常用的凸轮运动规律主要有三角函数运动规律[6]和多项式运动规律[7]。三角函数运动规律不易实现一个周期内任意多行程控制点,多项式运动规律中,单段多项式运动规律曲线的次数随着凸轮行程控制点的个数而变化。为适应握爪运动对凸轮行程多控制点的需求,不采用计算复杂、难以加工的高次多项式曲线,而采用由低次多项式顺滑连接而成的B样条曲线[8]。由于凸轮推动握爪开合运动为低速轻载工况,因此采用三次B样条曲线即可满足设计需求,可利用数控编程加工以保证曲线轨迹的准确性[9]。
三次B样条曲线方程的基本表达式如式(2)所示。

式中,Pi是控制点,Ni,k(t)是第i个三次基函数。用于凸轮设计的B样条曲线应当具有二阶连续性,因此对于任意两段连续曲线的五个控制点Pj、Pj+1、Pj+2、Pj+3、Pj+4,需满足式(3)。

由式(3)可得曲线参数需满足式(4)。
由于样条曲线并不一定经过控制点,为使凸轮行程规律满足关键控制点要求,设第i段三次B样条曲线4个控制点Pi、Pi+1、Pi+2、Pi+3中,控制点Pi、Pi+1、Pi+2三点共线且Pi+1为线段中点时,曲线经过点Pi+1,可得式(5)。

求解式(4)和式(5),可得曲线参数,得到第i段3次B样条曲线方程如式(6)所示。

3 凸轮运动规律
用B样条曲线求得的是以直角坐标系表示的凸轮行程,凸轮行程与凸轮基圆半径相加后用极坐标形式表达即可得到凸轮理论廓线,可求解得凸轮理论廓线的曲率半径如式(7)所示[10]。为避免凸轮实际廓线出现尖点现象及失真现象,凸轮理论廓线的曲率半径应该大于滚子半径,即满足式(8)。


要求凸轮轮廓控制握爪抓苗时到达放苗筒下方合适位置后迅速夹紧幼苗,送苗时到达张开的链夹上方合适位置后迅速打开放苗。因此采用实验的方法确定在抓放苗过程中握爪开合时机的关键位置及幅度D,代入式(1)计算得到对应的凸轮行程运动规律的关键控制点。由式(5)可知,需要重复关键控制点或在关键控制点前后增加辅助控制点以约束样条曲线。将所有控制点代入式(6)并通过式(7)和式(8)进行验证,若验证不通过则合理修改辅助控制点,最终得到合适的凸轮行程运动规律,如图3(a)所示。将理论廓线导入制图软件,向内偏置滚子半径值得到凸轮的实际廓线,如图3(b)所示,可见凸轮并未出现尖点和失真现象,达到了柔顺性要求。

图3 凸轮运动规律
4 结论
灌木幼苗移栽机的抓送苗机构可以显著减少用工人数、提升灌木幼苗移栽效率。抓送苗机构设计的核心在于握爪及凸轮设计,握爪指内侧使用柔性覆盖物以避免伤苗,在凸轮的设计过程中,采用3次B样条曲线运动规律,通过实验确定关键控制点以实现精确控制握爪开合时机,达到设计目的。
猜你喜欢
幼儿教育(2022年10期)2022-10-28
幼儿教育·父母孩子版(2021年6期)2021-08-05
幼儿教育·教育教学版(2019年9期)2019-02-02
数码世界(2018年11期)2018-12-13
科技视界(2018年21期)2018-12-10
船海工程(2018年1期)2018-03-01
软件(2017年6期)2017-09-23
计算机技术与发展(2017年2期)2017-02-22
建筑工程技术与设计(2015年26期)2015-10-21
国外科技新书评介(2014年11期)2014-12-08
