新工科背景下基于专业创新能力培养的采摘机器人控制系统设计*
2022-10-03 04:56:24王升升
南方农机 2022年19期
王升升
(吉林工业职业技术学院,吉林 吉林 132013)
0 引言
近年来,国家新一轮供给侧结构性改革的战略提出,其主要目的是以创新驱动发展,在此背景下,2017年2月,教育部提出“新工科”的概念,此举是为了提高高等教育中工科的创新能力。新工科专业的内核是以新兴的产业为核心,将智能制造、人工智能等用于传统的工科专业改革。同时,对于高职的工科专业来说,需要专业教育与双创教育融合培养,这样才能培养出实践能力更强、创新能力更强、具有国际竞争力的高端技能人才。
在此背景下,培养学生的创新实践能力迫在眉睫,以学生导师现有的研究方向为指引,提高学生自主创新的工程能力,在理论上设计一款基于集散控制系统(DCS)的采摘机器人,通过此项目的设计培养学生的专业创新工程能力。
1 设计思路
集散控制系统(DCS)在现代自动化控制系统中有着重要的地位,对于多控制对象有着良好的控制精度和效果。此次控制的对象为果蔬采摘机器人,解决采摘机器人只能单体控制不能进行多个采摘机器人综合控制的问题。多个采摘机器人在同时运作过程中易出现相互干扰的现象,导致多个采摘机器人协同作业效率低、对目标识别不精确等。针对此种现象,采用集散控制系统(DCS)作为多个采摘机器人的控制核心,同时在外部加入PLC技术、传感器技术,对多个采摘机器人进行控制和运动参数监测,并保证控制系统与外部设备数据的传输,最终达到多个采摘机器人按控制要求同时动作的目的[1]。
2 DCS控制系统结构
集散控制系统(DCS)由现场检测仪表、执行器、传感器、现场控制站、控制系统网络、现场操作员站、数据采集站、工程师站等组成,如图1所示[1]。
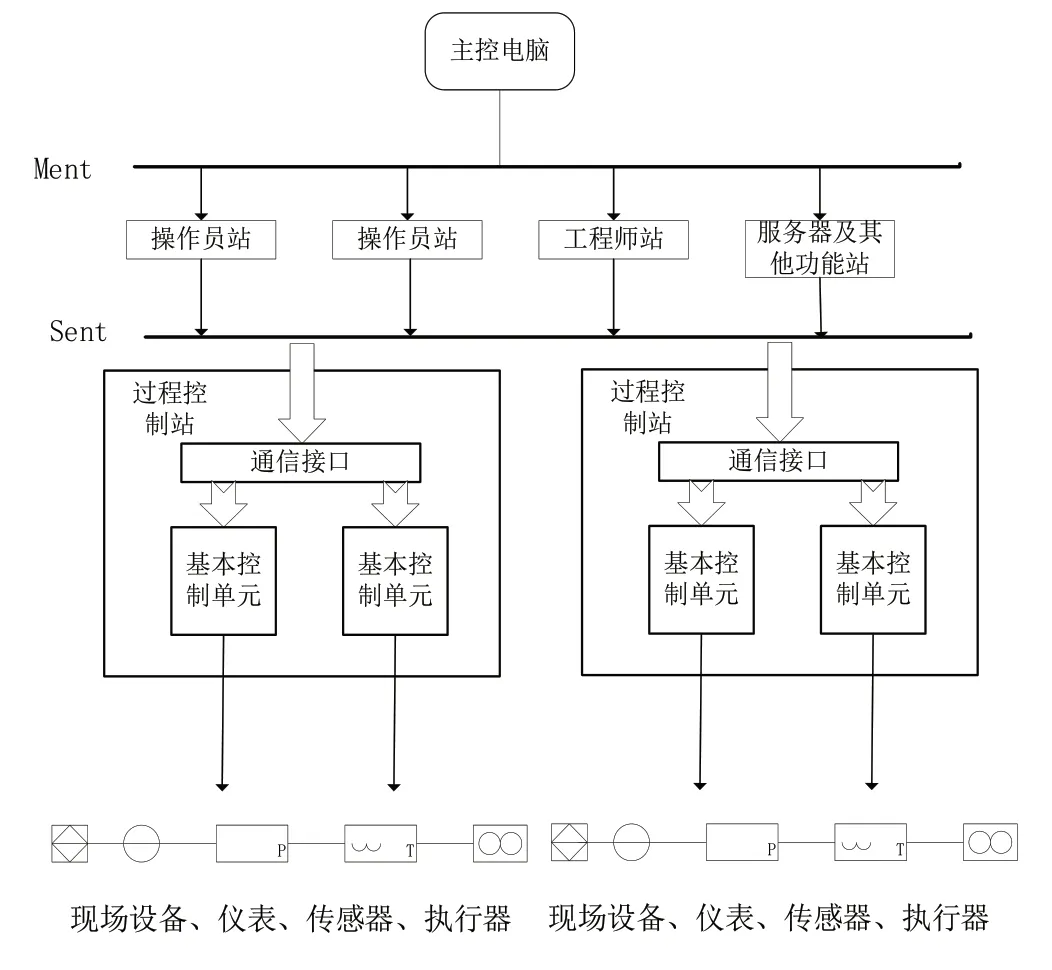
图1 DCS控制系统组成
其中,现场仪表、传感器等是组成控制系统的末端,是控制系统的“四肢”;现场控制站是集散控制系统(DCS)的核心,是控制系统的“大脑”[2];控制系统网络(MentSent)是数据传输的路径,是控制系统的“神经”;服务器和功能站主要功能是存储、监视等。正常情况下一个完整的集散控制系统(DCS)包括现场控制站、现场仪表、传感器、操作员站、工程师站及控制网络等[3]。
3 控制系统设计
本次多台采摘机器人控制系统是基于集散控制系统(DCS)建成的,在DCS典型控制结构上进行升级与优化,在控制体系中加入了西门子PLC S7-1500控制器、控制通信模块RS-485、现场传感器、现场执行器、多台采摘机器人,具体组成如图2所示[1]。控制系统设备的具体功能如下:主控制站是系统的“大脑”,主要功能是对传感器采集的数据进行分析、处理与计算,同时实时显示运动参数,后利用控制通信模块RS-485将接收的PLC数据通过计算和优化后再传回到PLC控制器中,通过PLC将控制数据下载到现场的执行器中。控制系统网络组成为控制通信模块RS-485[4],通信方式为半双工式串口,主要功能为实现现场主控制站、现场执行器、采摘机器人、PLC之间的数据通信。控制系统的控制逻辑为现场中控站与PLC通信,并通过PLC对采摘机器人发出控制指令,PLC可以在线编辑并在线实时通信,对采摘机器人的运动参数进行监测,同时实时优化参数并把数据传回采摘机器人执行端,完成相应动作。

图2 控制系统设计方案
如图2所示的控制系统中的现场设备包含各类传感器、控制模块。其中,位置传感器用于感知采摘机器人的空间位置,压力传感器用于感知采摘机器人机械手的夹持力,视觉传感器用于识别周围环境,碰撞传感器用于感知机械手碰撞压力,通过多种传感器保证采摘机器人的动作精度和采摘效果[5]。
4 控制系统硬件设计
4.1 现场主控制站设计
现场主控制站是控制系统的核心部件,需要对多台采摘机器人进行控制,对PLC控制器传输的数据进行分析与处理,其控制核心处理器要求数据处理速度快、功能可靠、功耗低等。本文现场控制站选择的处理器芯片型号为LPC2106,其功能为32位程序下可以保持操作频率范围最大为25 MHz,其外接I/O口多达32个,Flash程序存储器为128 kB[6]。
在实际应用过程中容易出现现场控制主站电压过低的现象,从而导致控制芯片LPC2106执行程序错误,在这种情况下需要对主机控制器进行复位。因此需要外加以IMP812监控器为核心的硬件复位电路,具体电路图如图3所示[1]。
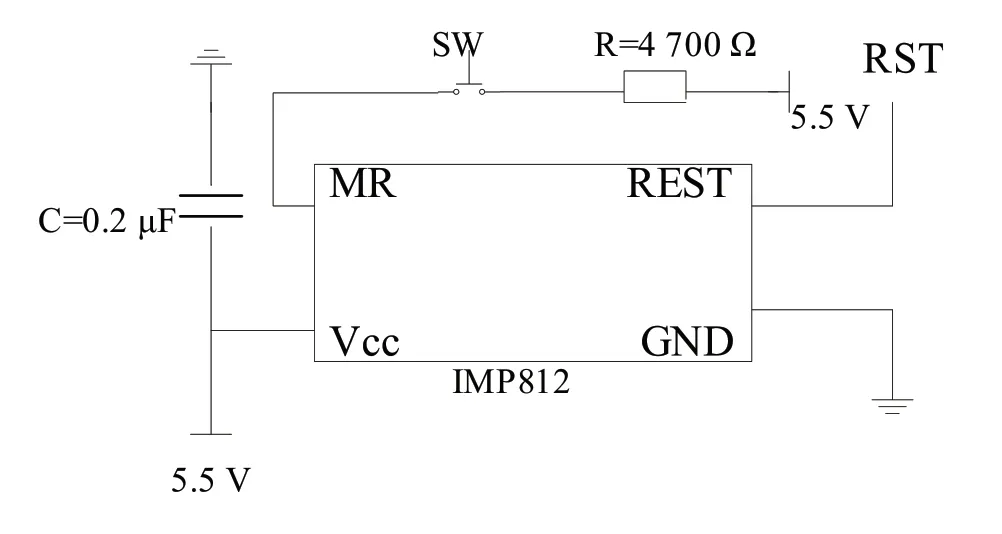
图3 复位电路图
4.2 通信模块RS-485设计
通信模块RS-485是控制系统中的“神经”节点,其功能是现场的传感器、PLC控制器数据都要向现场主控制站传输数据并进行通信,其过程为将现场的模拟信号转换成通信模块RS-485总线上的数字信号,再控制芯片LPC2106进行识别。通信模块RS-485采用无源转换器,对总线上模拟、数字信号进行隔离处理,提高数据的处理效率和准确性[7]。通信模块RS-485转换器的工作原理为通过光电耦合技术对输入输出信号进行物理隔离,屏蔽外界干扰信号,提高通信模块RS-485电路抗干扰能力[8]。
4.3 PLC控制器输入输出端口(I/O)分配
多台采摘机器人的控制系统是在集散控制系统(DCS)上搭建而成的,通过PLC对多台采摘机器人进行运动控制和实时监控。PLC控制器对应不同的信号模块可以检测不同类型输入输出信号,可以同时对多路信号进行采集[9]。本文中PLC控制器选择西门子S7-1500,具有6通道400 kHz高速计数,最大输入输出为32DI/32DO。多台采摘机器人的控制标准相同,运动参数与控制方式相同,西门子S7-1500输入输出信号进行输入输出端口(I/O)分配,输入端分别对应起始开关、四个方向限位开关、四个方向动作键、机械手动作按钮;输出端对应四方向电磁阀移动、电磁阀动作按钮等,通过西门子S7-1500可以使运动参数数据得到分析与处理。采摘机器人的运动参数主要集中在机械手的空间极限位置、机械手动作、现场设备的运行状态。
5 控制系统程序设计
多台机器人的控制系统的软件程序由两部分组成,分别是现场控制站的控制程序和现场设备的控制程序。现场控制站的控制程序是控制系统的主程序,主要用于下级传输信号的分析与处理,如对采摘对象的图像处理、现场设备信息处理和机械臂动作运动轨迹分析等;现场设备的控制程序主要作用是对现场设备进行参数控制,具体控制某台设备。现场控制站的控制程序和现场设备的控制程序主要使用通信模块RS-485,从而保证两部分的数据在传输过程中互不干扰[10]。
控制系统的工作程序如下:主控制程序启动后开始初始化,完成后激活各个传感器,其中视觉传感器开始工作采集目标图像数据,分析目标是否在图像中心;若采摘目标在图像中心,则通过通信模块RS-485向现场设备控制器发送控制指令[11];现场执行机构启动机械臂、旋转关节、电动推杆等,使机械手向采摘目标运动;同时,在执行机构上的各个传感器不断采集机器人的运动参数,通过通信模块RS-485回传至主控制站进行反馈,不断修正机器人的运动轨迹;采摘机器人机械手到达目标附近后,采摘机械手的位置传感器、避障传感器启动,通过前期的程序规划和数据分析完成路径动作,并控制机械手对目标进行切刀,完成对目标的采摘[12-13]。
6 结论
通过本文的设计可以实现多台采摘机器人的精确控制,也可解决多台采摘机器人在同时动作时相互干扰、作业效率低的问题。课题组深入研究了多台采摘机器人以集散控制系统(DCS)作为控制核心的工作原理与控制结构,实现了一台现场控制站对多台采摘机器人的整体控制,对多台采摘机器人的传感器、图像处理、执行机构参数的分析与处理[14]。
这种基于实践项目的工程设计的专业教育,对于高职工科专业来说能够较好地融入创新创业教育中。通过工程项目化方法与创新创业教育有机融合,既能培养学生的工程实践能力,又能解决学生创新意识不足的问题,同时在实践中与教师的科研项目相结合,不仅能在很大程度上提升学生的理论知识水平,而且能培养学生在专业方面的前瞻性,对于目前的创新创业教育具有较大的借鉴作用。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
装备制造技术(2020年4期)2020-12-25 05:26:02
重庆与世界(2019年10期)2019-11-25 07:46:16
中国电气工程学报(2019年3期)2019-09-10 02:59:51
无人机(2017年10期)2017-07-06 03:04:40
水利科技与经济(2016年6期)2016-04-22 05:07:42
通信电源技术(2016年1期)2016-04-16 04:57:29
机电信息(2015年3期)2015-02-27 15:54:53
武夷学院学报(2014年5期)2014-07-19 10:08:30
中国造纸(2014年1期)2014-03-01 02:10:04