互联电力系统滑模控制器设计与参量识别*
2022-09-29 00:55:40赵丽娜李慧秀
自动化技术与应用 2022年9期
赵丽娜,李慧秀
(大连科技学院 电气工程学院,辽宁 大连 116052)
1 引言
近年来,我国各行业对电力供电的需求不断增加,其原因在于工农业生产规模在不断扩大,这势必导致电力系统规模的不断扩大,其结构也越来越复杂。为了缓解电力供电需求的压力,电网的互联技术孕育而生。虽然大规模电网极大地缓解了用电压力,但其负面效应也随之而来。其中主要的负面效应是大规模电网会导致系统发生随机振荡现象,从而造成大面积停电等事故。因此,迄今诸多研究领域亟待解决的热点问题便是如何设计有效的控制技术来抑制电力系统中的随机振荡。
目前,针对诸如电力系统这样的非线性系统中出现的随机振荡现象,人们已经设计了许多控制技术,如状态反馈控制法[1]、滑模控制法[2-3]、模糊控制法[4]、Backstepping控制法[5]以及线性反馈控制法[6]等等。其中典型的工作如:张志伟等人利用模糊自适应PI算法有效控制了直流电机系统的随机振荡[7]。高丽宇等人基于滑模控制技术对电光时空网络信号的传输进行了控制研究[8]。倪骏康等人采用等效快速终端模糊滑模技术有效地抑制了电力系统的振荡行为[9]。许燕青等人基于稳定性理论对电力系统进行了滑模变结构控制[10]。王江彬和刘崇新针对滑模控制中出现的抖振问题提出了一种协同控制技术,有效抑制了四阶电力系统的随机振荡,控制效果稳定[11]。这些有益的工作为人们进一步研究电力系统的控制问题奠定了良好的基础。
虽然针对电力系统目前人们已经设计了许多控制技术,但是某些控制技术对于实际的大规模互联电力系统而言存在一定的弊端甚至失效。原因在于对于实际的大规模互联电力系统由于结构的复杂和外部扰动的存在,系统内部实际上存在着若干未知或不确定参量。这些不确定因素常常使得受控的大规模互联电力系统难以稳定,出现抖振现象,甚至导致控制技术完全失效。为此,本文在分析互联电力系统特性的基础上,提出了一种改进的滑模控制方法,快速平滑地使互联电力系统达到控制目标。同时,设计了不确定参量的识别律,使互联电力系统内部的未知或不确定参量得到了有效识别。仿真结果表明,本文提出的滑模控制方法不仅可以使系统有较快的收敛速度,而且对抖振现象也有很好的抑制作用,具有很强的鲁棒性。这种控制技术对保障大规模互联电力系统运行的稳定性具有良好的实用价值。
2 互联电力系统特性
我们以二阶互联电力系统为例来分析系统的动力学特性。二阶互联电力系统的连接如图1 所示。其中1、2 为系统的等值发电机; 3、4 为系统的主变压器; 5、6 为断路器;7为负荷。

图1 二阶互联电力系统的连接
对应图1的二阶互联电力系统的动力学方程为[12]:

式中δ 为励磁电势和端电压的相角差,单位为rad。ω为发电机角速度,单位为rad/s。Ps、Pm、Pk以及Pe分别为电磁功率、机械功率、电磁扰动以及负荷扰动的幅值,单位为W。α和β分别表示电磁功率扰动频率和负荷扰动频率,单位Hz。H为等值转动惯量,单位kg.m2。D为等值阻尼系数,单位为N.m.s/rad。
为了便于分析上述互联电力系统的动力学特性,坐标度变换x1=δ,x2=,ρ=Pm/Ps,v=Pk/Ps,μ=Pe/Ps,η=则动力学系统(1)可以写为:

采用实际系统参量,我们仿真模拟状态方程(2)输出状态变量随时间的演化来说明系统的输出特性,仿真结果如图2所示。我们发现在各时间段内,输出状态变量随时间的演化均不相同,并且带有一定的随机性。仿真模拟还发现,模拟初值选取的不同,演化曲线随时间的演化存在很大差异。我们通过模拟状态方程(2)的相图来进一步说明系统的输出特性,仿真结果如图3 所示。可以发现,虽然演化曲线对模拟初值表现出极大的敏感性,但无论系统随时间演化多长时间,曲线始终是在一个有界的范围内。这些特性表明,互联电力系统呈现稳定的随机振荡行为。
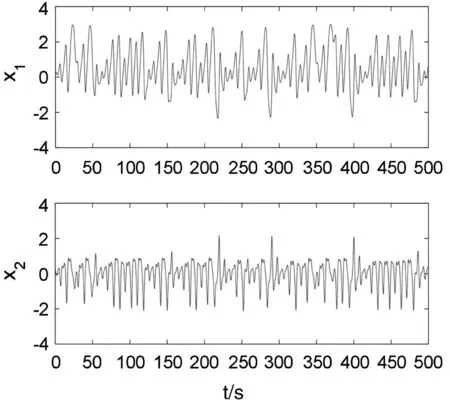
图2 状态变量随时间的演化

图3 状态方程(2)的相图
3 改进滑模控制器设计
滑模控制(Sliding mode control,SMC)技术是根据系统所期望的动态特性来设计有效的滑模面,通过滑模控制器使系统状态从滑模面之外向滑模面运动从而达到控制目标。滑模控制技术因具有响应快速、对系统参量变化及扰动不敏感以及物理实现简单等优势而备受人们的广泛青睐。为此,我们针对互联电力系统(2)设计改进的滑模控制器。加入控制器后,互联电力系统(2)具有下列形式:

这里u1和u2是设计的滑模控制器。
设受控系统(3)的控制目标为Q,定义系统误差为e1=x1-Q,e2=x2-Q,则误差的演化方程为:

设计滑模面s1=c1e1,s2=c2e2,c1和c2是正的配置参量,并假设受控系统(3)中的参量是不确定的,它的识别量是。
构造Lyapunov函数

其中k为正的调节参量。
由(5)式容易看出,下列关系成立:

考虑滑模面的定义以及误差演化方程,(6)式可以进一步写成:
设计不确定参量的识别律为:

则有

当设计滑模控制器为下列形式:

可以得到:

显然,Lyapunov 函数正定,其导数半负定,满足Lyapunov稳定性定理,互联电力系统得到稳定控制。
对施加滑模控制器后的电力系统进行数值仿真,系统参量取μ=0.02,ρ=0.2,η=γ=0.8,v=1.3。在施加滑模控制器之前,互联电力系统表现为如图2 所示的随机振荡行为。取控制目标为Q=Asint,取幅值A=0.5,配置参量c1=c2=0.2,调节参量k=0.05,仿真施加滑模控制器后互联电力系统状态变量随时间的演化如图4所示,不确定参量的识别过程如图5所示。

图4 受控系统状态变量随时间的演化
比较图2 和图4 可以发现,由于互联电力系统和目标信号的动力学行为不同,所以两个系统状态变量随时间的演化在初始阶段差异很大。但经过短暂的时间演化后,互联电力系统状态变量随时间的演化由原来的随机振荡行为转变为和控制目标一致的正弦振荡信号,说明我们设计的滑模控制器是有效的。同时,我们发现振荡曲线随时间的演化非常稳定,没有抖振等不稳定现象发生。图5显示,任取识别初值,不确定参量的识别曲线将从给定的初值快速演化至不确定参量的给定值0.4,并保持良好的稳定性,说明我们设计的不确定参量的识别律能够准确地识别出互联电力系统中的不确定参量。

图5 不确定参量的识别过程
4 结束语
本文提出了一种改进的滑模控制方法,快速平滑地使互联电力系统达到控制目标。同时,设计了不确定参量的识别率,使互联电力系统内部的不确定参量得到了有效识别。研究结果表明,在滑模控制器的作用下,互联电力系统状态变量随时间的演化由原来的随机振荡行为转变为和控制目标一致的正弦振荡信号。同时,采用本文设计的参量识别律,可以使参量识别曲线从给定的初值快速演化至不确定参量的给定值,并保持良好的稳定性。值得注意的是,本文提出的滑模控制方法的受控对象是二阶互联电力系统。随着实际电力供电需求的不断增加,势必导致电力系统规模的不断扩大,形成高阶互联电力系统。因此,如何设计有效的控制方法来抑制高阶互联电力系统中的随机振荡是一项十分有实际意义的课题,这也将是我们下一步的工作。
猜你喜欢
电气电子教学学报(2023年5期)2023-11-13 08:43:16
电子产品世界(2023年12期)2023-03-20 10:16:37
湖南大学学报·自然科学版(2021年1期)2021-02-21 08:39:40
山东冶金(2019年2期)2019-05-11 09:12:18
家庭科学·新健康(2018年10期)2018-12-15 11:26:16
安徽师范大学学报(自然科学版)(2015年3期)2015-04-25 02:40:12
物理实验(2015年9期)2015-02-28 17:36:51
数学年刊A辑(中文版)(2014年4期)2014-10-30 01:50:32
声学技术(2014年2期)2014-06-21 06:59:14
车辆与动力技术(2012年1期)2012-08-21 07:22:08