
无人机测绘在市政交通建设配套工程建设规划中的应用研究
2022-09-28 12:08黄东青黄丹余依娜
智能建筑与智慧城市 2022年9期
黄东青,黄丹,余依娜
(1.广州市中心区交通项目管理中心;2.广州市港航工程研究所)
1 引言
随着我国城镇化进程不断加速,各大城市相继发展城市便捷交通,以推进城市群、联合各区域资源优势形成区域经济纽带,实现绿色、生态、环保的城市建设。城市交通建设实施过程中也面临不少难题,其工程范围呈带状分布、站点密度大,与周边交通、商圈、教育等配套设施联系紧密,涉及配套设施路线选址、征地拆迁、过程监管、规划统一等,需要大量调研人员,采用传统手段对各个站点数据进行反复测量计算。
2 无人机测绘技术
无人机具有监控范围大、机动灵活、视角灵活等特点。利用倾斜摄影技术,对采集的数据进行处理,包括几何矫正、空三加密、影像匹配,进而提取高精度点云数据,生成3D数据(DSM、DOM、DEM,见图1),用于土方、边坡、桥梁等实体量测。无人机测绘得到了大力发展,也弥补卫星遥感在精细度上的不足,目前已经广泛应用国土测绘、环境检测、应急救援、土方测量等领域,取得了较好的社会效益。

图1 软件生成的点云数据
本文以广州市某隧道项目为例,结合无人机技术特点,阐述无人机在市政交通配套工程规划设计中的应用。
3 无人机作业流程及参数
3.1 无人机数据采集
无人机数据采集完成后需对采集数据进行处理(见图2)。数据处理主要包括预处理、空三加密、3D产品制作、质量检查等。DEM、DOM、DLG(3D产品)是后期工作的核心数据,利用空三加密生成的高精度点云数据生成DEM数据;根据DEM纠正相片,进行匀色和镶嵌处理后获得DOM数据。根据DEM生成等高线,根据DOM分要素描绘范围线,最终根据现场调绘成果修饰完成DLG数据的制作[1]。
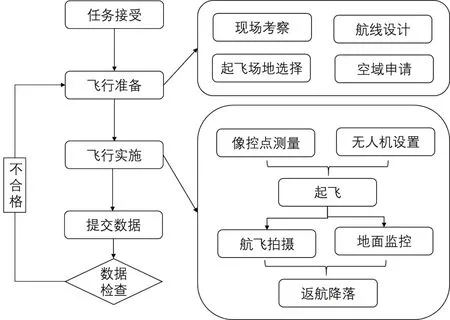
图2 无人机数据采集流程
为保证精度,本次设置的行高为85m,航片数量1850张,GCD 2.33cm/像素,总共航飞了4个架次,速度设置为6m/s,重叠率旁向80%,航向80%,镜头角度90度,带宽延伸20m。
3.2 数据处理流程
在无人机采集的图像中包含的GPS坐标位置数据以及IMU提供的姿态角数据可以辅助建立影像间的拓扑结构,数据处理流程如图3所示。采用最邻近方法,寻找图像间特征点的对应关系,建立满足几何约束的匹配特征点集,大量的坐标点在空间中构成了目标物的三维点云。在得到的三维点云数据中采用基于最小二乘法的多点拟合方法可以得到结构面的平面参数,与传统的测量方法相比更加省时省力,避免了攀爬高陡边坡的风险,与地面三维激光扫描等方法相比避免了盲区的产生。

图3 数据处理流程
3.3 飞行参数
采用大疆Phantom 4 PRO2.0四旋翼无人机,相机参数见表1,无人机参数见表2。

表1 相机参数

表2 无人机参数
4 数据成果及精度评定
采用Pix4D软件进行全自动化的数据处理,通过设置的控制点,生成测量坐标系统下的真实坐标三维模型,并以该高程精度实景三维模型为基础,获取DSM、DOM、DLG等测量成果,见图4。

图4 无人机测绘成果
导入正拍的和倾斜的航片,软件会自动从影像读入pos值和精度,精度水平设置为0.01m,精度垂直0.02m。
4.1 评定指标
精度评定通过采集的检查点坐标与对应GPSRTK实测点坐标进行比较,从成果中采集的地物标识,包括:道路线、斑马线、建筑等,差值称为残差,再利用中误差公式进行计算。
中误差计算公式:

式中:m为点位中误差;vi代表残差;n代表检查点个数。
4.2 正射影像空中三角测量结果精度
垂直方向拍摄的影像称为正射影像,成果一般用于平面计算校核。Context Capture软件空三加密平差处理时,空中三角测量过程会直接解算并输出其坐标值,统计坐标并于RTK采集的实测点进行较差,结果见表3。

表3 正射影像空三解算检查点精度统计
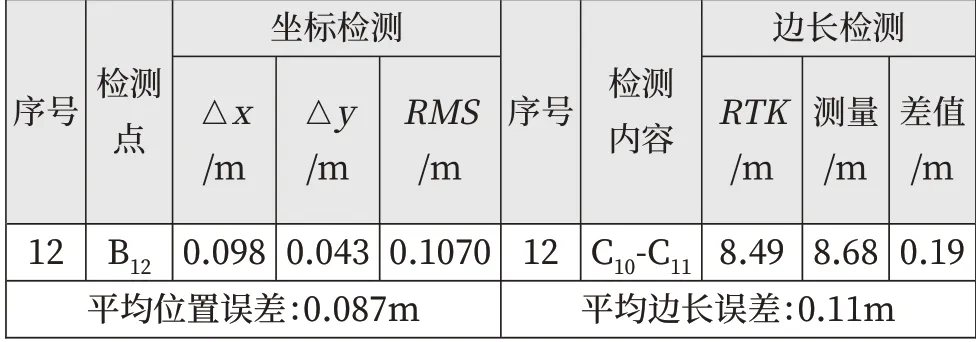
续表
统计得到正视影像空三解算成果的平面位置中误差为0.072m,高程中误差为0.094m,平面测量最大差值0.19m。根据CH/T 3006-2011《数字航空摄影测量控制测量规范》对空三加密成果的规范,正视影像空三加密检查点的平面、高程精度满足1:500比例尺的精度要求。
4.3 数字正射影像(DOM)结果精度
为评定DOM成果精度,在DOM上采集10个检查点,与GPS-RTK外业实测平面坐标对比,结果见表4。

表4 DOM结果精度
通过统计计算结果可知,DOM的平面位置精度为0.056m,最大残值为0.076m,实验结果满足1:500正射影像平面位置中误差平地、丘陵不大于0.6m的规定。
5 无人机测绘在市政交通建设配套工程规划中的应用
5.1 基础数据服务,辅助配套工程选址
无人机采集的数据经过处理后,得到高分辨率的数字地图,能够清晰的反映交通道路的地形、地貌、周边建筑、商圈的特征,图5为项目周边局部修正的正射影像,该项目建设在林西河周边,整合交通实施流量信息、公交站点信息及标注线,无人机及时采集的信息为项目临时道路的合理布局、施工用地选择发挥了重要作用。

图5 项目现场建模
5.2 点云三维测量,复核征地拆迁范围
交通建设项目配套工程常常涉及大量的征地拆迁工作,征地拆迁管理过程中因为拆迁信息统计不及时,造成征拆矛盾,主要是“抢建、抢种、抢围”传统的测图工期长,不能及时反馈问题,基于无人机的快速航测、建模能力,通过生成高分辨率点云数据,可以对不同时期的拆建房屋进行量测,量测精度见表,对违章认定、证据保全等争议问题提供全面的技术支持。同时,基于信息化管理平台,对航测成果存档留存,作为处理拆迁安置问题的重要依据。
5.3 土方计算,评估规划方案
土方平衡用于配套工程施工范围内挖土方和回填土方的平衡,关键在于无人机对现状原始地形数据采集,通过获取的实际地形的数字高程DEM进行曲面建模,利用计算软件采用方格网法,对原始地形进行插值处理,并计算获得挖填方量,土方工程统计见表5,误差主要来源于方格网采用的插值细度。通过该技术使工程建设管理人员在工程建设中快速判定现场临时堆土数量,及时合理地安排相关土方工程施工时序,精准确定需要被运送至弃土场的废弃土方数量和时间,解决有限土方中转临时用地条件下的土方施工组织管理问题[3]。
5.4 边坡分析,复核
基于多视立体视觉算法(PMVS)和运动结构恢复算法(SfM)对目标物进行三维重建,通过现场试验和数据后处理,获得地形表观数据。在三维点云中处理使用基于最小二乘法的平面拟合算法,可以提取出准确的结构面参数,进一步将这些结构面绘制在赤平极射投影图中,能实现高陡边坡的数字化测量,结果如表5所示,能满足实际生产过程中对土方量计算的精度要求。

表5 土方工程量统计表
6 结语
无人机航测作为一种成本低廉、方便快速的新型技术,在传统航空摄影测量技术的基础上,集成现代遥感技术,通过获取高分辨率影像资料,生成空间信息,结合GIS+BIM在空间数据库的建设,在市政交通配套工程乃至主体工程建设中,能够提供辅助决策,增强管理者决策能力和服务水平,有效弥补传统测绘手段在信息化测绘时代难以满足生成需求的不足,提高配套工程选线、选址效率,应用前景广阔。
猜你喜欢
建材发展导向(2022年10期)2022-07-28
计算机系统应用(2022年4期)2022-05-10
建材发展导向(2022年4期)2022-03-16
天津医科大学学报(2021年4期)2021-08-21
宁波大学学报(人文科学版)(2021年4期)2021-07-07
建材发展导向(2019年5期)2019-09-09
建材发展导向(2019年5期)2019-09-09
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
中学数学杂志(高中版)(2016年4期)2016-07-27
癌症进展(2015年3期)2015-12-18
