双源型纯电动汽车能量管理优化策略
2022-09-26 12:26曾云龙
电力科学与技术学报 2022年4期
唐 强,汤 赐,曾云龙,王 勇
(长沙理工大学电气与信息工程学院,湖南 长沙 410114)
电动汽车具有节能环保的优势,这使得电动汽车发展成为一种必然趋势,但单一动力源蓄电池驱动存在缺陷,动力电池比能量大续航能力强,但功率密度低、大电流充放电能力差、循环寿命短。超级电容功率密度大可以承受大电流频繁充放电且循环寿命长,但比能量极低续航能力差,因此复合电源系统的使用可使得超级电容和蓄电池优势互补,由于复合电源的使用,能量管理策略(energy management strategy, EMS)的制定是复合电源系统功率分配的核心,决定了车辆动力性和经济性[1]。
目前,能量管理策略可分为基于规则类、基于滤波类和基于优化类。众多学者对能量管理策略进行了应用与改进,文献[2]基于确定规则设计了车辆在启动加速、巡航和制动减速各阶段的逻辑门限控制策略,改善了控制效果且丰富了确定规则的设计;文献[3]采用基于模糊规则的模糊控制,通过遗传算法优化模糊控制隶属度函数,提高了制动能量回收效率;文献[4]基于滤波控制,结合考虑超级电容的荷电状态(state of charge,SOC)设计实现能量动态分配控制,有效地降低了高频分量对于蓄电池的冲击;基于优化的管理方法分为全局优化和实时优化,文献[5]等基于全局优化算法DP算法优化电动汽车的能量分配,有效地提高了能量利用率,但是存在“维数灾难”现象即随着状态变量和控制变量的增加算法求解时间呈指数型增长,因此求解效率低、实时性不佳;文献[6]采用实时优化方法提出了实时非线性模型预测控制器优化能量分配,在降低能耗的同时减少了计算量;文献[7]采用实时优化方法应用于自适应巡航控制,在模型预测控制框架下设计了增量式自适应模型预测(model predictive control, MPC) 控制器,有效地提高了自适应巡航控制性能。
综上可知,目前能量管理研究主要围绕车辆动力性能开展能量分配,基于规则和滤波的方法易于车载实现,且不需要行驶信息的储备和庞大计算,能量分配响应快;缺点是无法保证能量损耗最优。基于全局优化能获得优化控制效果,但是需要行驶工况的先验知识且存在“维数灾难”,工作在离线状态。实时优化由于模型预测、神经网络等预测可减少行驶信息的储备和庞大计算,但较依赖于预测模型精度,目前处于快速发展阶段。近些年来,汽车愈发从功能型向智能型升级转变[8],智能汽车通过车载传感器系统和信息终端实现与人、车、路等信息交换,使车辆更加智能化。驾驶意图识别是未来智能汽车的重要发展方向之一,本文基于规则、滤波控制,综合规则、滤波控制的优点,增加考虑驾驶员意图的因素,通过驾驶意图的识别自适应调整能量分配,使得在传统控制策略中只考虑“车”因素基础上,增加考虑“人”的因素。将工况分类为高速公路、城市快速公路、郊区路况、拥堵路况,几乎涵盖实际驾驶中的所有工况类型,在不同类型工况下仿真,更加全面地分析所提策略的工作情况。
1 融合驾驶意图识别的功率分配控制策略工作原理
1.1 复合储能系统拓扑结构
复合储能系统拓扑结构一般可以分为被动并联、全主动和半主动结构[9]。本文采用超级电容及电池的半主动构型,其结构特征为DC/DC变换器与超级电容的输出端相连后与蓄电池并联在母线两端。相比于其他构型,该构型超级电容能够在宽电压范围内工作且总线的电压能维持相对稳定,采用一个DC/DC变换器可降低成本[10-11]。在电机的驱动和发电的不同状态下,工作在不同模式的双向DC/DC参与控制蓄电池和超级电容充放电,复合储能系统依据制定的EMS实现协调工作,复合储能系统半主动构型拓扑结构如图1所示。

图1 超级电容及电池的半丰动构型Figure 1 Semi active configuration of supercapacitor and battery
本文多维量化分析复合电源工作情况,融合多维度输出功率、输出功率标准差、输出功率标准差相对值、整车能耗等构建量化指标,建模如下。
1)功率波动剧烈程度量化分析。蓄电池/超级电容输出功率标准差为S,横向比较不同工况下蓄电池/超级电容输出功率波动情况的标准差相对值为RS,即
(1)
(2)
(3)
其中,T为循环工况时长。
2)整车系统能量耗损量化分析。车辆在行驶过程中的整车系统能量耗损主要为超级电容、蓄电池内阻损耗以及DC-DC变换器的能量损耗,归集为
Pbl(k)+Pdl(k))·Δt)
(4)
其中
(5)
(6)

(7)
式(4)~(7)中N为切分的块数;仿真步长Dt为1 s;Rsc为超级电容内阻;Rbat为超级电容蓄电池内阻;Isc(t)、Ibat(t)分别为超级电容、蓄电池在t时刻的电流;ηDC(t)为DC/DC转换器效率;PDC(t)为DC/DC转换器在t时刻的输出功率。
1.2 自适应调整能量分配机理
驾驶意图——模糊逻辑自适应控制策略结构如图2所示。融合驾驶意图识别自适应调整能量分配的物理机理:激进型驾驶意图下可将能量适当多分配给超级电容,从而保护蓄电池;平和型能量需求下可将更多的能量分配给蓄电池,从而维持超级电容剩留一定能量,以备在启动或上坡时使用。该策略的控制过程可分为驾驶员驾驶意图识别、低通滤波器滤波和能量分配三部分,其中,驾驶意图识别由驾驶风格识别、加速意图识别构成的多模糊识别控制器实现,通过设置合理的模糊规则,输出模糊控制结果。由于低通滤波器的截至频率由时间常数决定,故通过驾驶意图识别结果自适应调整时间常数调整能量分配。该策略结合超级电容和蓄电池SOC的实际情况且融合驾驶意图充分发挥蓄电池高比能量和超级电容高比功率动力特性,可有效地延长蓄电池寿命。

图2 驾驶意图——模糊逻辑自适应控制策略结构Figure 2 Driving intention-fuzzy logic adaptive control strategy structure
2 融合驾驶意图识别的功率分配控制策略实现过程
2.1 驾驶意图识别
驾驶意图无法用精确模型描述,模糊控制对解决无法用数学描述的模型特别适用,控制结果符合人的思维以及经验,而且具有鲁棒性高的特点[12],故采用模糊控制识别驾驶员驾驶意图。
运用混合式学习模式的整本书阅读不只在课堂上进行阅读和讨论,而是将阅读延展到家庭、社区等任意空间,且灵活采用线上、线下的学习方式,至少一部分是在线讨论、探究,至少一部分是在实体课堂上由教师介人指导的阅读学习,还有至少一部分是学生的自由自主阅读。课堂学习、在线互动、非课堂非在线自主阅读,至少这三个模块整合在一起,形成完整的整本书阅读体验课程。
2.1.1 驾驶风格识别
驾驶风格分为动力性(Power)和经济性(Ecomic)需求。车辆加速度均值E(a(t))表示某时间片段内对加速度取平均,表征该时间片段内速度的变化率。E(a(t))越大表征速度变化快,驾驶员变换速度频繁,驾驶风格偏向动力性;E(a(t))越小,驾驶员速度变化较平稳,其驾驶分格偏向平和的经济型。由于所获得参数中若出现极端值情况,均值将失去代表性,所以引入汽车加速度标准差σ(a(t)),共同识别驾驶员偏向于动力型驾驶需求或经济型驾驶需求,从而准确地识别不同的驾驶风格。
(8)
(9)
式中a(t)为当前加速度采样值;n为加速度取样个数,考虑实时性,本文取t时刻过去3 s的加速度,采样间隔为1 s,故n取3。
获得识别参数后进行驾驶风格识别的模糊控制器设计。模糊输入、输出论域:E(a(t)) =[-1,1],σ(a(t)) =[0,1]、Ds=[-1,1];所对应的模糊子集:E(a(t))={ NB(负小)、NM(负中)、S(一般)、PM(正中)、PB (正大)},σ(a(t)) ={S(加速度标准小)、M(加速度标准中)、B(加速度标准大)},Ds={Economic(动力型)、Power(经济型)}。加速意图识别规则如表1所示,模糊规则的输出界面如图3所示。

表1 加速意图识别模糊控制器规则Table 1 Fuzzy controller rules for accelerating intention recognition
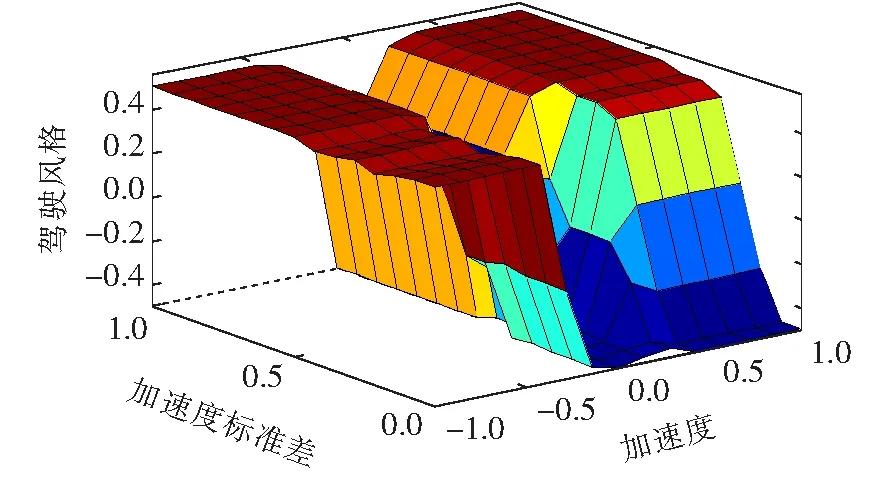
图3 驾驶风格Figure 3 Driving style
2.1.2 加速意图识别
在行驶过程中,根据实际的路况、事态等多维因素,驾驶员有不同的加速意图。加速意图表征了对转矩需求和加速的紧急程度。通过对加速踏板开度的表征参数和加速踏板变化率的表征参数,经由模糊推理识别出加速意图。本文加速踏板的开度以加速时的加速度Aacc表征,加速踏板的变化率以加速度冲击影响因子Jf表征,Aacc、Jf越大则表示加速意图越强。
(10)


表2 不同工况下平均冲击系数Table 2 Average impact coefficient under different working conditions

表3 加速意图识别模糊控制器规则Table 3 Fuzzy controller rules for accelerating intention recognition

图4 加速意图Figure 4 Acceleration intention
2.2 滤波常数自适应调整
驾驶风格识别和加速意图的识别结果作为输入,经由滤波器时间常数模糊控制器控制时间常数,完成驾驶意图识别模块。在低通滤波器时间常数模糊控制器的设计中,输入、输出变量的论域:Ds=[-1,1],Macc=[0,1],时间常数τ=[5,10];所对应的模糊子集Ds={Economic(动力型)、Power(经济型)}、Macc={YS(加速意图弱)、YM(加速意图中)、YB(加速意图强)},τ={S(小)、M(中)、B(大)}。所用模糊规则的输出界面如图5所示。

图5 低通滤波器时间常数模糊规则三维Figure 5 Three-dimentional diagram of time constant fuzzy rule of low pass filter
2.3 主能量控制器规则设计
主能量分配控制器采用经典Mamdani结构的三输入一输出模糊控制器,其输入分别为Pr=[-0.2,1]、Sb=[0.2,1]、Sc=[0.2,1];输出变量为Kb=[0,1]。对于Pr,由于实际域与论域不对应,所以实际域要转换为论域[13];Sb、Sc、Kb论域与实际域一致,不用转换。输入量与输出量之间的关系如图6所示。
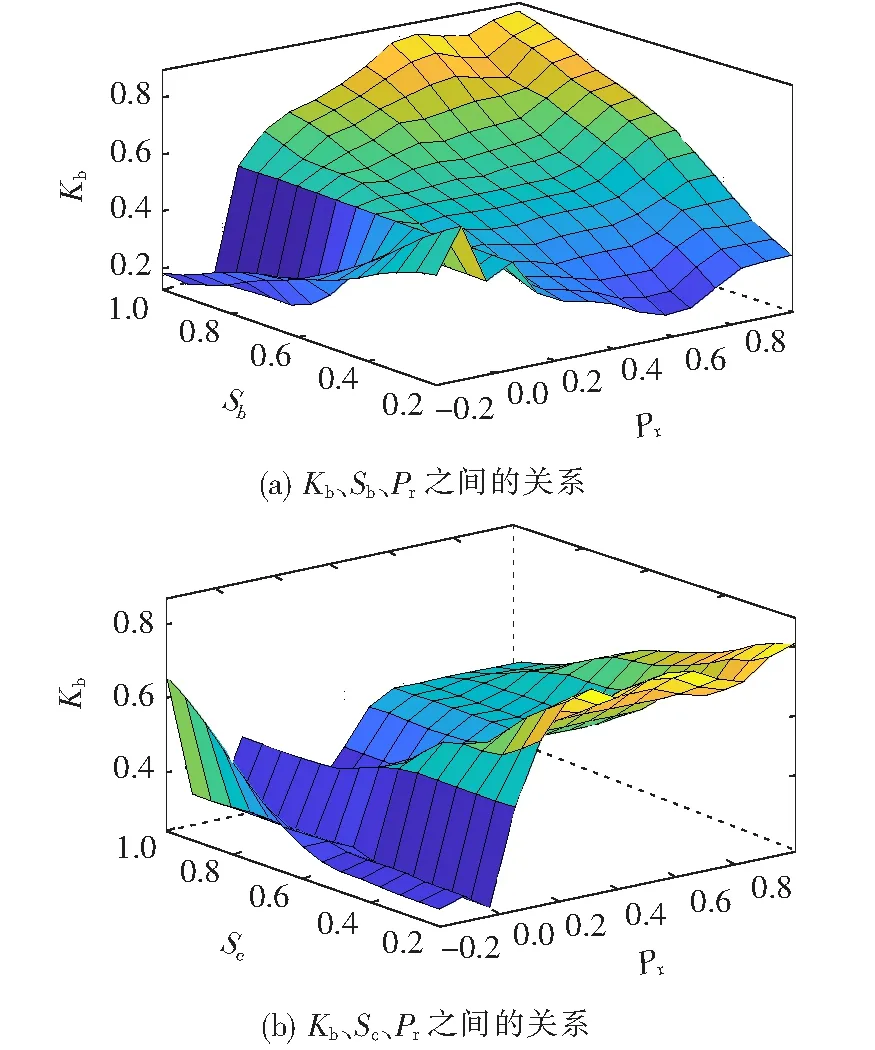
图6 输入量与输出量之间的关系Figure 6 Relationship between input and output
3 建模与仿真
3.1 复合电源功率分配控制策略建模
参考《新建纯电动乘用车企业管理规定》纯电动汽车技术要求,选择小型车辆进行研究,根据规定中的技术要求进行参数匹配,仿真车辆所用的主要参数如表4所示。

表4 仿真车辆主要参数Table 4 Main parameters of simulation vehicle
基于驾驶意图识别结果、滤波常数自适应调整和主能量控制器,搭建控制策略Simulink模型并嵌入到Advisor复合电源车辆顶层模型完成仿真,控制策略Simulink模型如图7所示。

图7 融合驾驶意图识别的纯电动汽车功率分配控制方法的Simulik模型Figure 7 Simulik model of hybrid electric vehicle power distribution control method based on driving intention recognition
3.2 仿真结果分析
不同工况下驾驶员的驾驶意图具有不同特点,为更全面地分析所提策略的工作情况,在不同类型工况下进行仿真(策略1、2分别为传统、本文所提策略)。以极端拥堵工况NYCC为例,图像化仿真结果,其他类型工况的控制结果以表格形式归集。
3.2.1 驾驶意图识别控制结果
基于搭建的驾驶工况、驾驶意图识别模型,得到驾驶意图识别结果,该结果控制低通滤波器时间常数,时间常数分布情况如图8所示,可知驾驶意图识别控制器能识别驾驶意图,并能自适应调整低通滤波器滤波常数,从而调整能量分配。

图8 NYCC工况(类比拥堵工况)下驾驶意图控制结果Figure 8 Control results of driving intention under NYCC condition (similar to congestion condition)
3.2.2 蓄电池输出功率
NYCC工况下蓄电池输出功率变化情况如图9所示,在整体趋势方面,采用策略2蓄电池输出功率较策略1更加平滑。4种类型工况的蓄电池输出功率指标如表5所示,其他工况下的蓄电池表现与NYCC工况类同。
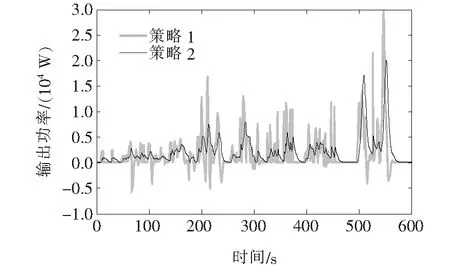
图9 NYCC工况下蓄电池输出功率Figure 9 Battery output power under NYCC condition

表5 蓄电池输出功率评价指标Table 5 Evaluation index of battery output power kW
结合表5可知,采用策略1、2时输出功率标准差分别为 3.818、2.846 kW,采用策略2较策略1蓄电池整体波动减小25.46%。在输出功率波动范围方面,策略1输出功率(kW)波动范围为[-5.742,29.731],峰谷差为35.473 kW;策略2输出功率(kW)波动范围为[0,20.047],峰谷差为20.047 kW,较策略1降低了43.49%。在NYCC工况下,控制策略2将制动回收能量全分配给超级电容,蓄电池吸收为零,这是由于走走停停,制动回收能量较小,超级电容的能量储备有利于在该工况下的车辆频繁启动。综上表明,无论是蓄电池输出功率的整体波动剧烈程度还是波动的范围均降低,有利于延长蓄电池的使用寿命。
由表5可得,横向对比各工况下的蓄电池输出功率波动情况,在US06-HWY(高速公路,0.716)和HWFET(城市快速公路,0.519)工况下,蓄电池输出功率标准差相对值小,而在UDDS(郊区路况,1.125)和NYCC(拥堵路况,1.348)工况下,蓄电池输出功率标准差相对值大。原因是蓄电池在高速和城市快速公路工况下车速高且相对平稳,所以蓄电池输出功率较平滑。采用策略2时蓄电池输出功率标准差相对值的均值为0.927。
3.2.3 超级电容输出功率
NYCC工况下超级电容输出功率变化情况如图10所示,在整体趋势方面,采用策略2时超级电容输出功率较策略1时波动更加剧烈。4种类型工况的超级电容输出功率评价指标如表6所示,可知采用策略1、2时超级电容输出功率标准差分别为3.624、5.849 kW,整体波动提高了61.40%。在输出功率波动范围方面,可知采用策略1时输出功率(kW)波动范围为[-4.124 1,22.88],峰谷差为27.003 kW,策略2的输出功率(kW)范围波动为[-15.373,32.562],峰谷差为47.935 kW,提高了77.52%。策略2更加充分发挥超级电容承受大功率波动的作用。

图10 NYCC工况下超级电容输出功率Figure 10 Output power of supercapacitor under NYCC condition

表6 超级电容输出功率评价指标Table 6 Evaluation index of supercapacitor output power kW
3.2.4 整车系统能量耗损
整车能量耗损可作为评价车辆经济性重要指标之一,根据式(4)~(7),可得整车能量耗损如表7所示,不同工况下整车能耗呈现差异化分布,采用所提策略的整车系统单位里程能量耗损均值为32.61 Wh/km。

表7 策略2下整车能量耗损Table 7 Vehicle energy loss under strategy 2
4 结语
在确定半主动式复合电源系统拓扑后,建立整车顶层模型,通过识别驾驶意图自适应调整滤波常数,搭建能量管理模型,完成仿真。
1)在当下汽车从功能型向智能型升级转变的发展趋势背景下,研究融合驾驶意图识别的能量控制策略具有重要意义。本文通过驾驶意图识别自适应调整低通滤波器滤波常数,从而自适应调整模糊控制能量分配。
2)在整车能量耗损能耗方面,复合型电源纯电动汽车在US06-HWY(43.807 Wh/km)和NYCC工况(36.952 Wh/km)时能量耗损最大,而在HWFET(25.113 Wh/km)和UDDS(24.547 Wh/km)工况时能量耗损较小。采用所提策略控制的整车系统单位里程能量耗损均值为32.61 Wh/km。
3)在复合电源状态监测方面,采用所提策略(蓄电池输出功率标准差相对值均值为0.927)与策略1(1.215)相比较,蓄电池输出功率波动降低了23.72%,超级电容输出功率波动增强,所提策略更有利于发挥超级电容削峰的积极作用,延长蓄电池寿命。
猜你喜欢
法律方法(2022年2期)2022-10-20
福建基础教育研究(2022年4期)2022-05-16
太阳能(2022年2期)2022-03-07
法律方法(2021年3期)2021-03-16
重型机械(2019年3期)2019-08-27
电机与控制学报(2018年8期)2018-05-14
西部资源(2017年5期)2018-02-23
海峡科技与产业(2017年12期)2018-01-18
军民两用技术与产品(2016年3期)2016-01-05
延河(下半月)(2014年3期)2014-02-28