
基于卡尔曼滤波的高压断路器机械特性监测系统设计
2022-09-26 02:37何莉鹏张一茗张文涛李少华
自动化与仪表 2022年9期
何莉鹏,张一茗,张文涛,李少华
(平高集团有限公司,平顶山 467001)
目前,在人类社会的工业、农业、交通运输、文教卫生以及人民生活等领域,都离不开电网提供的电能, 而高压断路器作为电网中重要的开关设备,起着重要的保护及控制作用,它的安全可靠直接关系到整个电网的稳定性。 国际大电网会议和国内的中国电力科学研究院对高压断路器故障情况进行过大量统计分析,其中高压断路器故障的80%是机械原因,而其中大多数故障是操动机构的问题[1-2]。近些年来, 高压断路器在电网中数量逐渐增大,发展高压断路器机械特性在线监测技术,准确了解高压断路器机械动作状态,及时对高压断路器进行检修,避免因为故障造成的严重事故,这对于整个电力系统的安全稳定运行具有十分重要的意义[3]。
众所周知, 高压断路器所处环境极其复杂,干扰源非常多,实际采集的数据会受到各种各样噪声的污染,如何从包含误差的数据中获得设备真实的运行状态,是当前研究的热点[4-5]。 传统机械特性监测系统主要采用阈值滤波、中值滤波、滑动滤波等方法,其方法实现简单,但效果较差,去除噪音效果不理想,本文在传统滤波算法的基础上设计了一款基于卡尔曼滤波的高压断路器机械特性监测系统。该系统可以实现分合闸线圈电流、 储能电机电流、行程、分合状态的在线监测,满足高压断路器日常运行监测要求。
1 系统总体设计
高压断路器的机械特性主要指高压断路器的操动机构在分合操作过程中的运动特性[6],其主要采集的信号包括操动机构的行程、分合闸线圈电流、储能电机电流、分合状态等信号,根据上述信号计算高压断路器的行程、分(合)闸时间、分(合)闸速度、超程、弹跳次数、弹跳时间、平均速度、工作电流等结果。
高压断路器机械特性监测系统主要由机械特性监测装置、分合闸线圈电流传感器、储能电机传感器、模拟行程传感器、数字行程传感器组成,其系统结构如图1 所示。
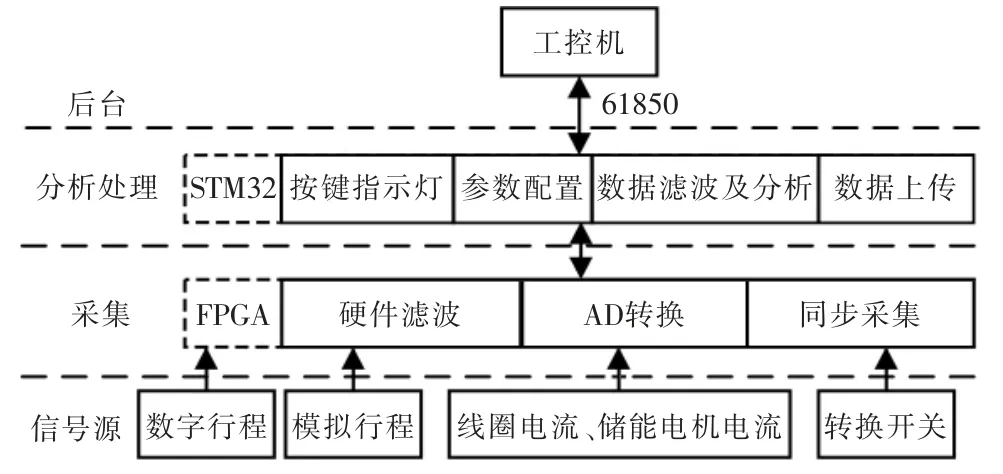
图1 机械特性监测系统结构图Fig.1 Structure diagram of mechanical characteristic monitoring system
高压断路器的机械特性信号主要分为线圈电流、储能电机电流、触头行程和分合状态4 种。 模拟行程传感器和数字行程传感器采集高压断路器的触头行程信息,其中数字行程传感器信号经硬件滤波电路后直接传输到FPGA,模拟行程传感器信号经硬件滤波后通过AD 采集模块传输到FPGA;线圈电流和储能电机电流均由一个霍尔电流模块采集,经硬件滤波后通过AD 采集模块传输到FPGA;辅助开关可反应高压断路器的分合状态,该信号可直接接入FPGA。
FPGA 接收到信号后,将信号整理并存储起来,STM32 读取数据后首先把数据进行对齐,然后对数据进行滤波,滤波后的数据将用于分析计算高压断路器的机械特性参数,并发出预警、报警等信号,同时还将原始数据和分析结果以MMS(IEC61850 通信协议中的一种报文形式)的方式发送至上层网络。
2 系统硬件设计
系统硬件结构如图2 所示。
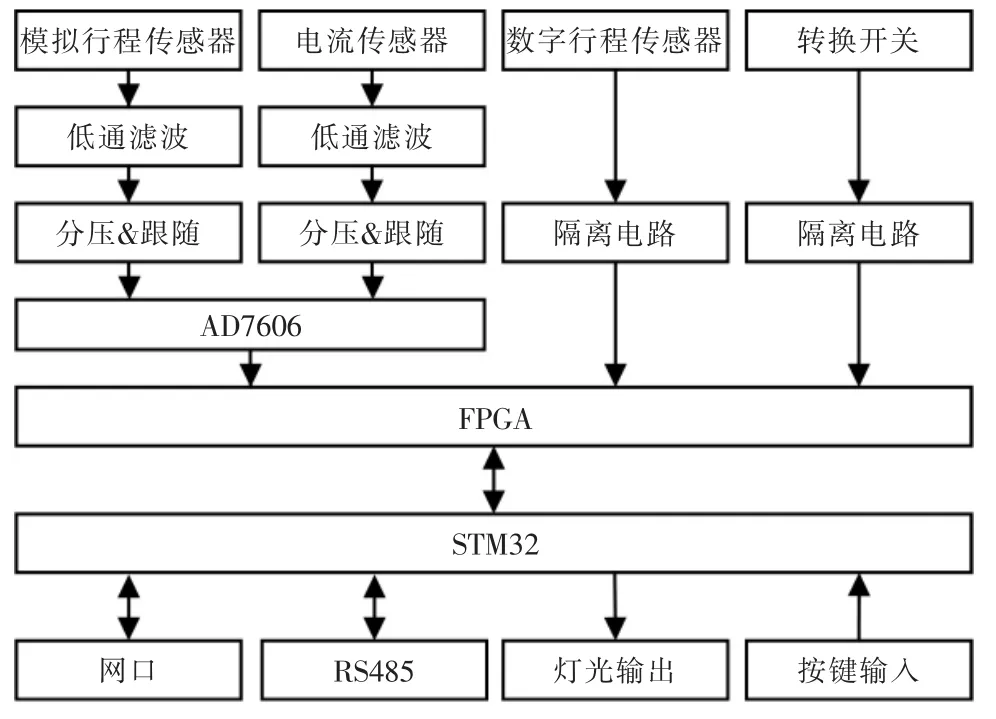
图2 机械特性监测系统硬件结构图Fig.2 Hardware structure diagram of mechanical characteristic monitoring system
本系统模拟行程传感器可将高压断路器动作时的角度变化转化为电压值变化,该信号经低通滤波电路和分压& 跟随电路后接入AD7606; 数字行程传感器采用旋转编码器,编码器为5 V TTL 电平,经隔离电路后直接接入FPGA; 电流传感器采用霍尔电流传感器,可测试分闸电流、合闸电流、副分电流、储能电机电流,利用霍尔效应闭环原理,能快速测取电路的电流信号,测量精度高,该传感器将电流信号转换为电压信号输出并经低通滤波电路和分压& 跟随电路后接入AD7606,然后输入FPGA;辅助开关一般安装在机构箱内,上面装有反应断路器分合状态的触点,该触点信号经隔离回路后直接接入FPGA。
本系统AD7606 共采用一片共8 路输入通道,其中器件采用单5 V 供电,数据端口的电平为3.3 V。AD7606 需要根据外围电路配置一些工作参数,本系统在设计时考虑了变更各项参数的可能性,使用电阻焊接与否的通断路状态来配置AD7606。
3 系统软件设计
3.1 FPGA 软件设计
FPGA 的外部时钟为CLKIN=24 MHz 经过内部的锁相环(PLL)将输入时钟倍频、分频,其中24 MHz用于波形存储、触发判断、总线切换、与STM32 接口,6 MHz 用于AD 采样。 机械波形采样率与储能波形采样率可以通过STM32 与FPGA 接口进行设置。FPGA 的软件逻辑框架图如图3 所示。

图3 FPGA 软件逻辑框架图Fig.3 FPGA software logic framework diagram
信号采集到FPGA 后,FPGA 对主分电流、副分电流、合电流、模拟行程、数字行程信号以及开关分合状态信号进行触发逻辑判断,触发条件主要包含比较值和点数2 个参数,当达到触发条件后,产生数据记录开始信号, 记录数据达到规定数量后,产生数据记录结束信号并停止记录数据。
数据存储主要是FPGAWRMRam 和FPGAWRERam 2 个模块,FPGAWRMRam 按照采样频率将每个采样的数据存储到SRAM 中,由于存储机械波形的SRAM 有2 片,具体存储哪一片,由总线切换进行控制。 总线切换可以控制FPGA 和STM32 对SRAM 存储空间的读取和写入, 总线切换的前提条件是FPGA 写数据结束和STM32 读数据结束,只有在这2 个条件任何一个条件结束的时候,才会进行总线切换,其他时刻读写使能保持不变。 机械波形存储空间为2 片SRAM,一片定义为MRamA,另一片定义为MRamB,储能波形存储空间为ERam。
3.2 STM32 系统软件设计
STM32 系统上电后, 首先进行初始化操作,主要包括看门狗启动、参数配置、系统自检等。 随后等待总线切换使STM32 可以读取FPGA 的数据,读取数据后会进行判定, 当数据是新数据时, 则读取FPGA 的波形数据和配置参数, 对波形数据进行滤波处理,并对滤波后的数据进行分析计算,计算结果重新写入FPGA 进行保存。 当数据是已经分析处理过的数据时, 会进行判断是否需要发送到上位机,若需要发送到上位机,则波形数据文件、分析结果等数据从FPGA 读取出并通过IEC61850 协议发往上位机。 软件流程如图4 所示。
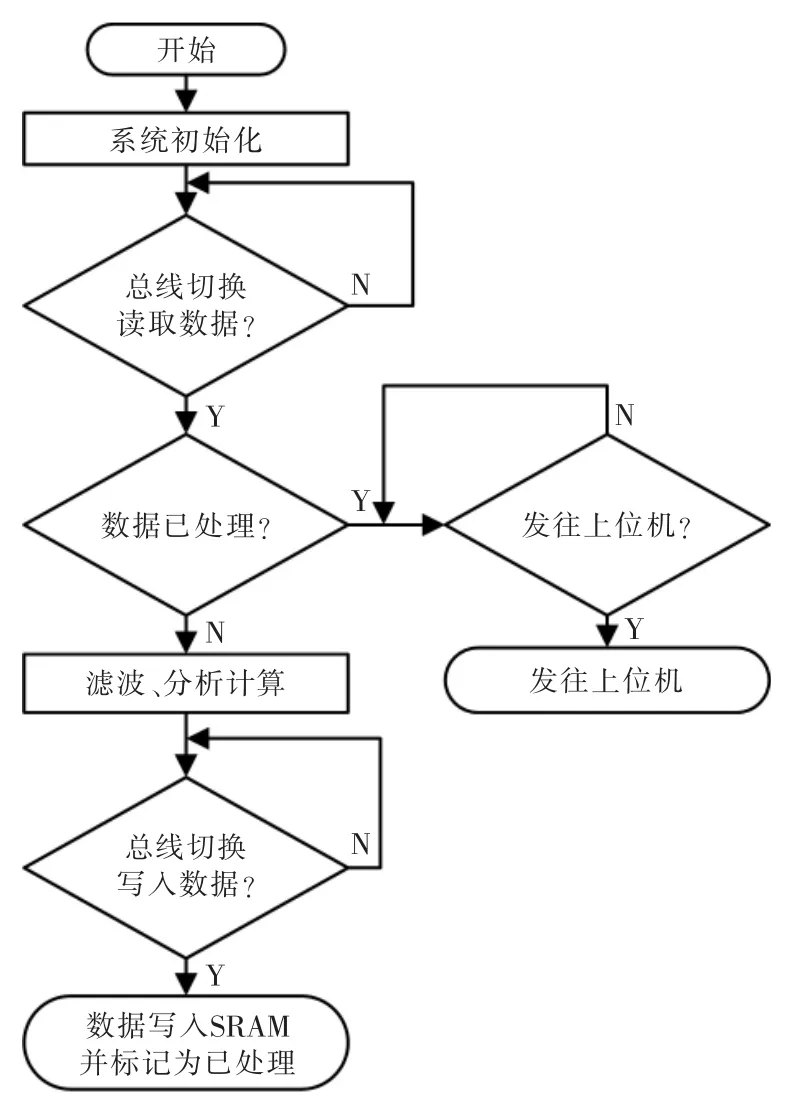
图4 STM32 软件流程Fig.4 STM32 software flow chart
3.3 STM32 与FPGA 通信设计
STM32 与FPGA 接口采用总线的形式,将FPGA 中的寄存器看做STM32 的外部存储空间, 进行统一编址, 对于STM32 而言,FPGA 中有三部分地址空间,具体如下:
(1)0x2C0000~0x2C001F:STM32 只读空间,存储FPGA 的读取所有变量的实时值、 波形存储的起始和结束地址等信息。
(2)0x000000~0x00003F:STM32 只写空间,设置FPGA 中通道触发条件、读取点数等所有设置参数。
(3)0x200000~0x27FFFF:STM32 只读空间,FPGA 存储的波形空间,包括机械波形和储能波形,共享同一块地址空间。
3.4 滤波算法设计
本系统中, 为了除去干扰和噪声对信号的影响,除了对采集的信号进行了低通滤波等硬件滤波外,还对采集信号进行了软件滤波。
软件滤波主要对采集的分合闸线圈电流信号、模拟行程信号、储能电机电流信号进行滤波处理,其流程如图5 所示。
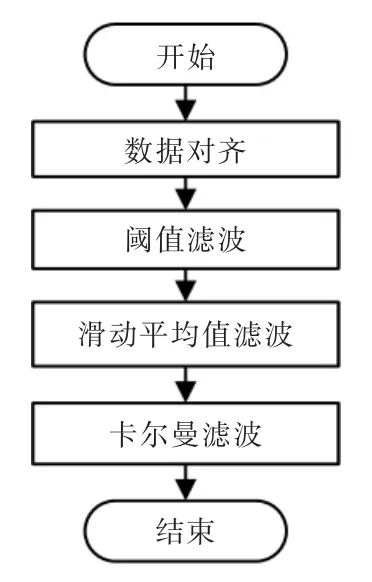
图5 滤波算法流程Fig.5 Flow chart of filtering algorithm
滤波开始前,将所有采集的信号按照时间顺序依次排列对齐,所有数据一定在时间上同步,每种采集信号点数最大值为M 个。 本滤波算法中,3 种信号滤波过程一样, 因此不再分别描述, 只选择1种通用方式进行介绍。 滤波时先采用阈值滤波方式滤除采集信号中的尖刺干扰信号,防止尖刺干扰信号对后续滤波算法的影响。设最大偏差值为A,A 为固定值,由实验测得,本次待滤波数据Di减去上次滤波结果值Di-1,若其结果小于或等于最大偏差值A,则本次采样值有效,若其结果值大于最大偏差值A,则本次采样值无效,放弃本次采样值Di,本次采样值用Di-1替代,则每次采样数据值Di如下:

式中:Di为本次采样数据值;Di-1为上一次采样数据值。
将经阈值滤波处理后的数据进行滑动平均值滤波,将待测数据5 个为一队,当M-i>i>3 时,队伍分为Xi-2,Xi-1,Xi,Xi+1,Xi+2,对5 个数据取平均值,并将该值赋予最中间那个数据Xi,Xi赋值完成后,则把队伍整体左移,新的数据放入队尾,并剔除队首的数据。
当i<3 时,队伍分为Xi,Xi+1,Xi+2,Xi+3,Xi+4,对5个数据取平均值并将平均值赋值给Xi,Xi赋值完成后,则把队伍整体左移,新的数据放入队尾,并剔除队首的数据。
当M-i<3 时,队伍分为Xi-4,Xi-3,Xi-2,Xi-1,Xi,对5 个数据取平均值并将平均值赋值给Xi,Xi赋值完成后,则把队伍整体左移,新的数据放入队尾,并剔除队首的数据。
因此可得滑动平均值滤波取值公式如下:

将进行完滑动平均值滤波的数据进行卡尔曼滤波。 卡尔曼滤波是以线性化方程的状态方程为基础前提的,主要是通过上一时刻系统的状态求出系统当前的最有状态[7-10]。 经滤波后,信号预估值和测量值用线性随机微分方程描述如下:

式中:X(n)为n 时刻的预估值;Y(n)为n 时刻的测量值;W(n)为过程噪声;V(n)为测量噪声;A,B 为系统参数,由于本系统测量的信号是连续单独变化的,没有其他控制系统干扰,因此本系统中取1。
模型函数构建完成后, 下面开始迭代估算,具体分为先验值部分和后验值部分。 在先验值部分对n 时刻的先验状态估计值X()和先验估计误差协方差P()估算如下:

式中:P(n-1)为n-1 时刻后验估计误差协方差;Q为过程噪音W(n)的协方差。
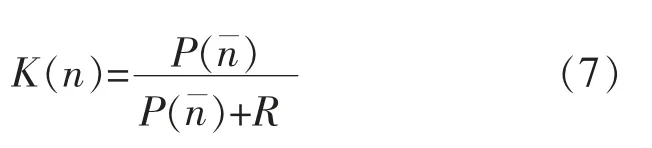
式中:R 为测量噪声V(n)的协方差。
用上式的卡尔曼增益来计算状态n 时刻的状态估计值为

然后在测量过程中不断更新误差协方差P(n),即对P(n)不断修正:

4 实验结果及分析
本系统中由于信号比较多,以合闸线圈电流为例,分别比较了采用阈值滤波、滑动平均值滤波、本系统设计的滤波3 种滤波方法的效果。 合闸线圈电流3 种滤波方法的效果如图6~图8 所示。

图6 阈值滤波效果图Fig.6 Raw data curve
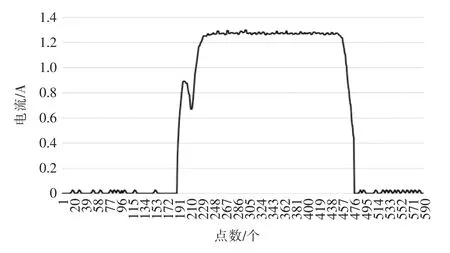
图7 滑动平均值滤波效果图Fig.7 Sliding average filtering effect
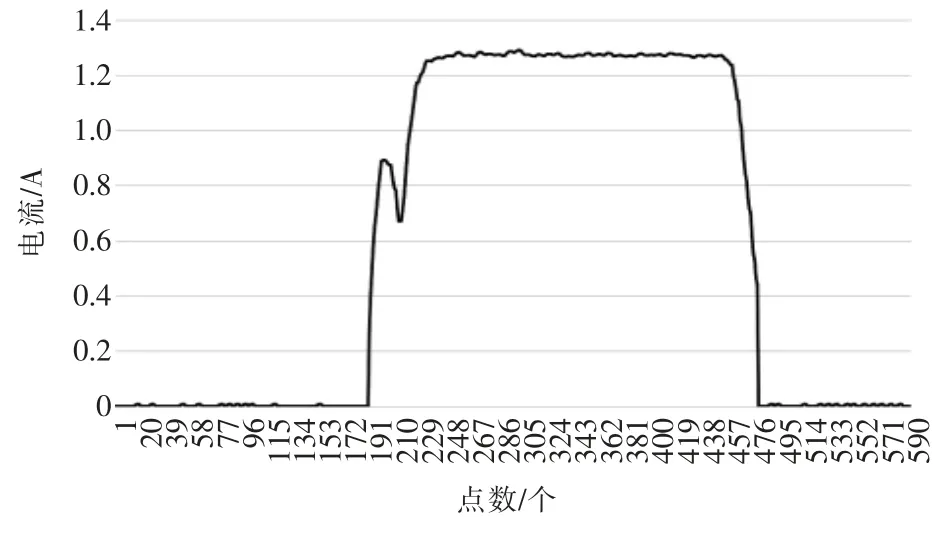
图8 本系统滤波方法效果图Fig.8 Effect drawing of filtering method of the system
由3 种滤波效果对比可以看出,经阈值滤波处理后,信号没有比较大的毛刺,但仍存在较多小的毛刺;经滑动平均值滤波处理后,毛刺幅值和数量进一步变小;本系统设计的滤波算法抑制噪声的效果最好,其效果曲线更顺滑,毛刺的幅值和数量最少。
此外,对采集的信号进行滤波后,不应影响分合闸时间、分合闸速度、行程、分合闸同期性等分析计算结果,为了比较分析,在ZF12D-126KV 高压断路器上同时接入本系统和德国Kocos 公司的ACTAS P6 开关特性测试仪进行比较, 两者接入同一个行程传感器和断口线,其中断口线选择该断路器的A 相。 测试场景如图9、图10 所示。
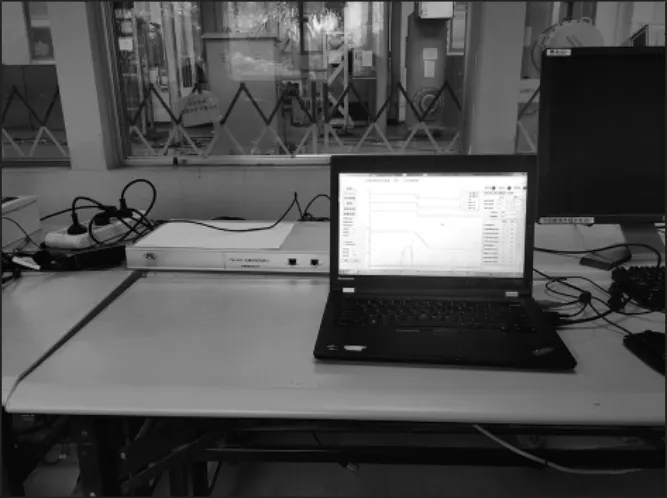
图9 机械特性装置及测试界面Fig.9 Mechanical characteristic device and test interface

图10 行程传感器安装图Fig.10 Installation drawing of travel sensor
分合闸测试结果如表1、表2 所示。

表1 分闸测试结果表Tab.1 Opening test results
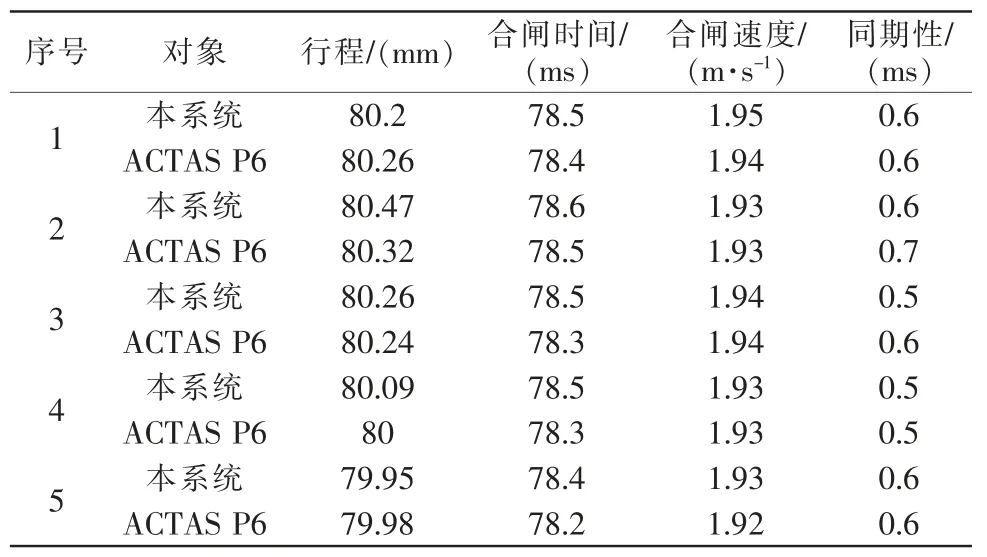
表2 合闸测试结果表Tab.2 Closing test results
由本系统与ACTAS P6 得对比结果可以看出,本系统采用得滤波算法减少采集信号得干扰后,可有效提升测量精度, 其测试结果精度在±1%内,与ACTAS P6 相差不大,可以满足现场使用需求。
5 结语
本文采用阈值滤波、滑动平均值滤波、卡尔曼滤波相结合的方式对采集的信号进行处理,融合了各个算法的优点,同时又避免了单个算法使用时的缺点, 对于机械特性监测装置的研制具有借鉴意义。 对于后续的研究主要考虑尝试对卡尔曼滤波算法进行升级, 更好的去除采集信号中的干扰成分,进一步提升测试精度。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
青海电力(2021年2期)2021-07-21
农村电气化(2021年7期)2021-07-19
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年9期)2019-05-30
电子制作(2018年16期)2018-09-26
电子制作(2018年14期)2018-08-21
电子制作(2018年10期)2018-08-04
电子制作(2017年8期)2017-06-05
电子制作(2017年20期)2017-04-26
