
多无人机对组网雷达的协同干扰建模研究
2022-09-26 10:26:24朱军伟顾丽娜
科学技术创新 2022年26期
朱军伟,顾丽娜,李 蕊
(杨凌职业技术学院,陕西 杨凌 712100)
概述
由组网雷达所形成的监测系统已应用于各行各业,诸如跟踪识别、实时搜索等皆已成为其具体表现[1-4]。该系统经完善其干扰防护措施之后,兼具极强的抗干扰应用能力,故而在军事演习及实战中得到广泛应用[5-8]。
当前,对于多种欺骗干扰方式重点关注的是距离欺骗。为简化系统,文章旨在考虑距离前提下的目标欺骗,见图1。众所周知,一旦探测到对方雷达所发出的电磁波噪声(或信号)时,待命的干扰机立即对该噪声(或信号)进行精准处理,在可控时间段内将其导出发射,迫使雷达短时间内能够迅速接收到有效的反馈信号。

图1 欺骗干扰图
应对干扰是该系统的具体表现,故目前情况下最多且能够有效应用的即为多架无人机经过协助同步干扰雷达系统,见图2。接收到的信号经反复传输后,最终会将无人机上的干扰设备信号落在自身所对应的雷达之上,而目标航迹点的详细信息,最终有效传输至组网雷达的信息融合中心之上[9-12]。正因为多无人机的协助飞行与同步跟踪,故而即时的目标噪声信号在所建立的前提(统一的坐标系下)实时呈现,目标航迹的信息点据此形成,而诸多的航迹点若是连续的,则1 条虚假航迹的信息路径自然形成。依据本质,若能将飞行航迹进行实施控制,且为协同控制,这样督促对方必须形成飞行航迹(欺骗干扰所形成),为此促使对方在一定时间段内紧急处置突发情况,从而实现欺骗目的。
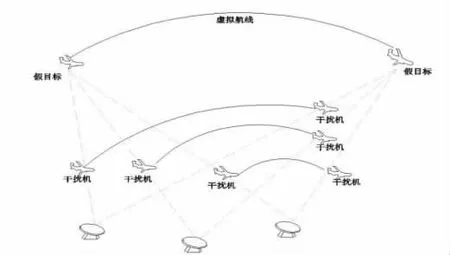
图2 协同干扰组网雷达示意图
实际情况中,因为技术手段的不断进步,无人机可达到隐身状态,导致远距离无法及时监测到,而只有当其达到一定距离事,才可检测到有限信号。大多干扰设备所产生欺骗干扰的信号经逐步扩大及增强环节,能够被雷达有效检测。综上,文章据此通过寻求最小数量的无人机从而实现实际要求的航迹信息,具体的运动规律和其对应的处理策略。
1 模型建立
针对雷达网的虚假航迹, 首先应对组网雷达进行全面侦查,以获取地理位置、工作参数等信息[13];其次是需要对无人机的飞行路线进行精密的规划[14-16];最后要求无人机之间密切协同,对飞机的飞行状态、干扰机的工作状态进行精确的控制。无人机和假目标做定向飞行的运动关系见图3。
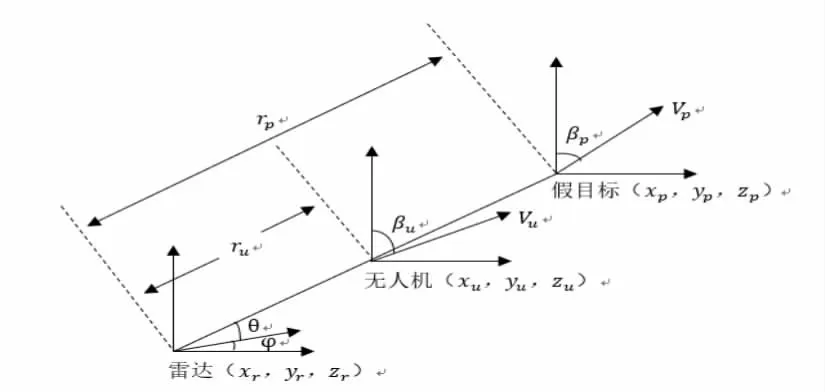
图3 无人机及假目标做定向飞行运动关系图
2 模型求解
将无人机和假目标做定向飞行的运动模型转换到球坐标下可得
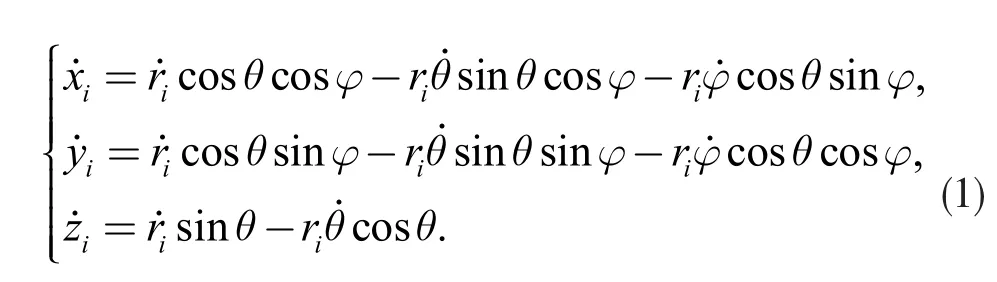
结合球坐标的运动模型,有如下参数
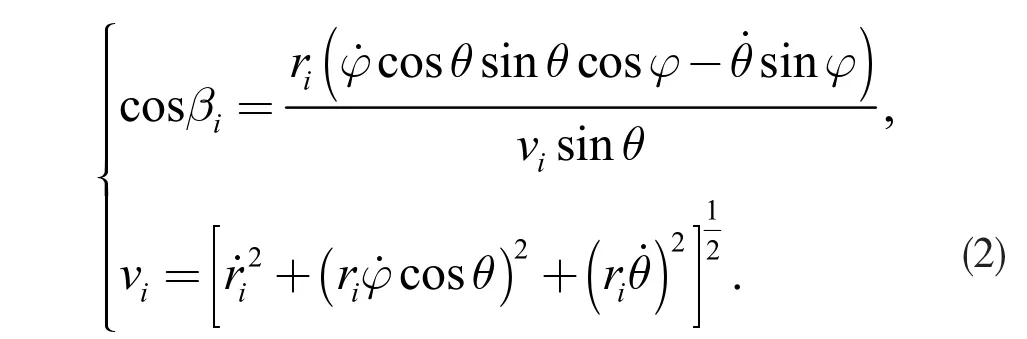
由上式可知,假目标及其无人机的实际运动状态 θ, φ,,耦合在一起。接下来研究假目标的速度值与无人机的实际情况:令具体关系经仔细计算为

通过几何关系计算得
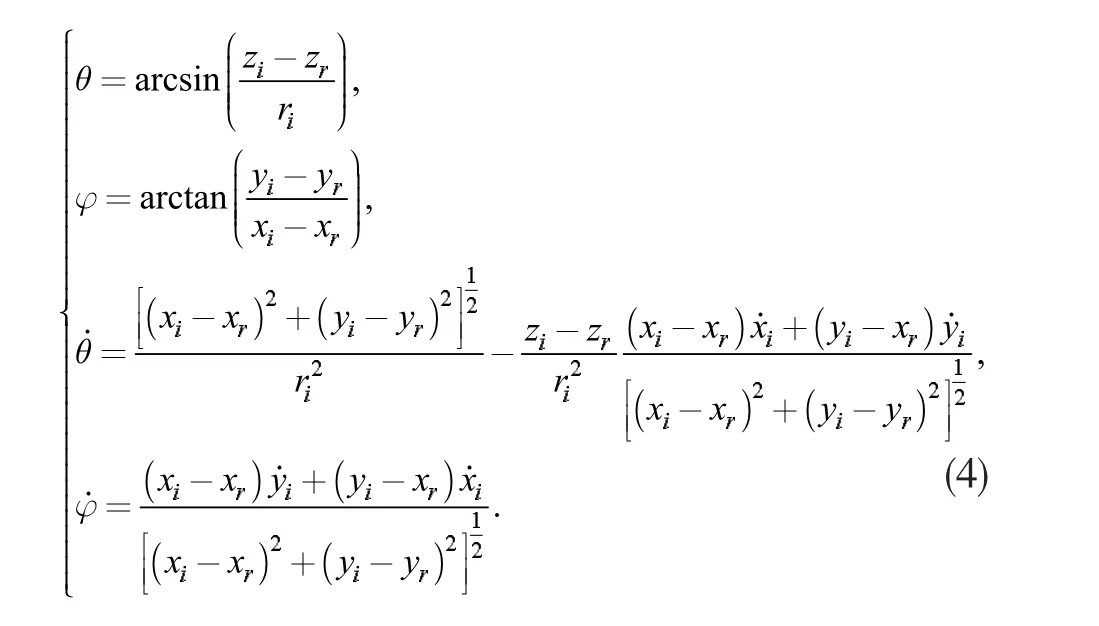
令式(4)中的i=p,即可根据目标的航向求出θ, φ,四个耦合量。故以此类推可设计出无人机架数为M 时的模型。具体如下:
(2) 依据题中所给虚假航迹数据;
(3) 设置i=1 求解第一架无人机的运动状态;
(4) 解算式(1)得出运动模型;
(5) 解算式(2)得出球坐标系下的运动参数;
(7) 令i=i+ 1返回到步骤(4)直到i>n时干扰结束。
经仿真分析,得出欺骗干扰形成的假目标航迹见图4 和图5。
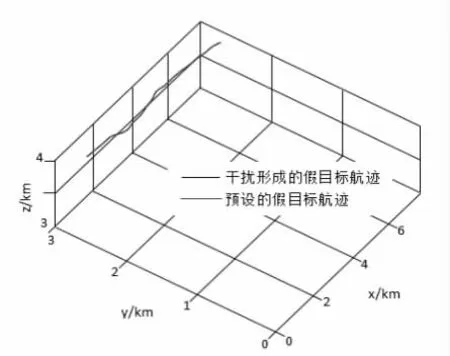
图4 虚假目标航迹
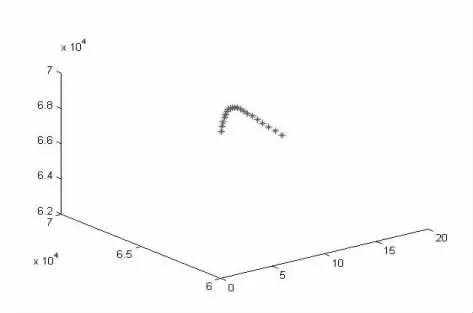
图5 欺骗干扰引发的实时航迹
若5 台无人机能够分别对其实施航迹的欺骗干扰,可得

虚假目标航迹和无人机飞行高度一旦确定,即可确定无人机的运动轨迹,继而得出无人机的运行速度和航向角见图6 和图7。
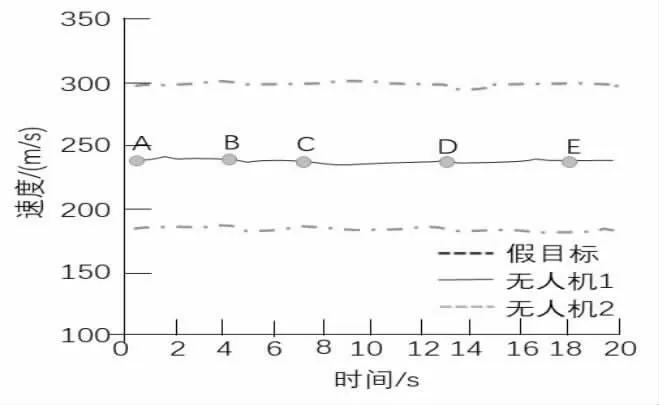
图6 因欺骗干扰引发的假目标航迹
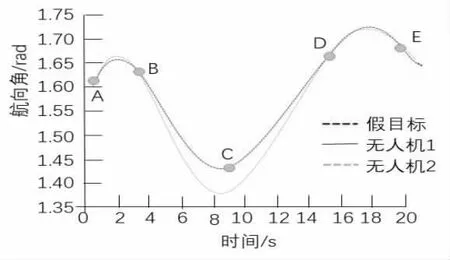
图7 欺骗干扰形成的虚拟航迹
3 结论
采用仿真实验分析理论,获得新的航迹点、无人机运动参数、运行速度、航向角等相关参数,根据这些参数判断虚拟航迹存在的运动规律和合理性。这对仿真模拟虚假目标航迹及分析预判无人机的运动规律及其合理性、时效性具有一定的理论指导意义。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
青年歌声(2019年12期)2019-12-17 06:32:32
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
电子制作(2017年24期)2017-02-02 07:14:16
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
火控雷达技术(2016年3期)2016-02-06 02:30:26
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34
