草莓快速采摘机设计
2022-09-26 10:26乐海文陈水泉刘文谦
科学技术创新 2022年26期
乐海文,刘 对,陈水泉,刘文谦
(九江学院,江西 九江 332005)
引言
草莓作为一种重要的经济作物,营养价值丰富,在中国属于比较广泛栽培的浆果类水果。中国是世界上最大的草莓生产国,但大部分的草莓种植规模不大。由于大型的草莓采摘机械手昂贵,因此大都还是采用人工的方式采摘,机械化、自动化程度低。草莓作为一种季节性经济作物,这就导致人工采摘工作强度大,人手不足,采摘效率低等问题。并随着人工成本的上升,给种植草莓的果农带来了巨大的困扰。通过认真分析研究发现手工采摘草莓有以下不足:
(1) 草莓作为一种季节性经济作物,成熟期短,因此到了成熟的时候需要雇佣大量临时工人来专门采摘,并且由于成熟期集中在几个固定时间段,工人供不应求,成为稀缺资源。
(2) 采摘环境较差,大棚环境温度较高,人很难长时间在大棚内采摘。
(3) 人工采摘效率差异化很大,采摘效率无法保证。
针对以上问题,我们应该考虑设计产品功能包含以下几个方面[1]:
(1) 草莓的采摘与收集实现自动化,高效率完成采摘。
(2) 巧妙设计采摘机构及收集机构,灵活好用。
(3) 价格便宜,操作简单
1 设计方案
1.1 总体设计构想
要实现草莓采摘的高效率、易操作、体积小、成本低等特点,首先采摘机构的效率要优于人工采摘,为此采用三爪旋转刀具来作为采摘机构,其效率可以达到人工的三四倍,基本实现了目的。其移动定位机构参考机床的x y z 轴移动方式,采用了两轴联动,能比较精准的实现对草莓的定位。收集机构采用皮带传输。总体设计见图1。

图1 草莓采摘机总体设计三维图
1.2 采摘机构的选用
经过前期调研,发现大多采用机械臂和传感器实现采摘功能,这种方法缺点在于成本高、操作繁琐而且不适用于我国小型农户的草莓垄设计。因此在采摘机构的选择上提出方案构想:采用三爪旋转刀具利用旋转和刀片给草莓的扭矩和切割力达到采摘的目的。此方案源自多次的实地考察,观察草莓的特性以及向农户的咨询中了解到草莓茎脆且只需很小的力就可以完成采摘。因此制作了三爪旋转刀具,当草莓卡在刀片缝里时,刀片同时在绕中间轴做旋转运动,旋转过一定角度时,草莓茎在扭矩和刀片的切割力下就会断裂,完成采摘过程。此方案优点在于易控制,而且可以通过控制机构实现不同高度的草莓采摘,效率也远胜于人工采摘,经过各个机构之间协调的工作可以实现采摘功能[2]。
采摘机构由:铝制刀片,圆柱棒料(长:100 mm直径:30 mm),小型减速电机(额定转速为120 r/min)和联轴器组成。铝制刀片镶嵌在开槽的圆柱棒料上,棒料通过联轴器和电机相连。整体运作:当采摘机构通过控制机构定位后,通过控制按钮启动电机,电机旋转,电机的旋转动力通过联轴器传递给圆柱棒料,圆柱棒料的旋转带动镶嵌在棒料上的刀片旋转,刀片转过一定角度后,草莓卡在V 型的刀片底部,刀片继续旋转,草莓受到扭矩和刀片底部一定的切割力,从而和草莓茎脱离,实现采摘。
1.3 控制机构的选用
根据设计要求对处于不同垂直度和水平方向上草莓的需精准定位,选择滚珠丝杆和电动推杆来实现纵横向运动。
(1) 滚珠丝杆由螺杆、螺母、钢球、预压片、反向器、防尘器组成。它的功能是将旋转运动转化成直线运动,用电机驱动,把电机的旋转运动转化为垂直方向的上下运动,来控制垂直方向上的定位而且它具有摩擦损失小、传动效率高、精度高、轴向刚度高、不能自锁、具有传动的可逆性等能满足我们在作业过程中的一切运动要求[3]。
(2) 电动推杆是一种新型的电动执行机构,电动推杆主要由电机、推杆和控制装置等机构组成的一种新型直线执行机构,电动推杆在一定范围行程内作往返运动,电动机经齿轮减速后,带动一对丝杆螺母,把电机的旋转运动变成直线运动,利用电动机正反转完成推杆伸出和收缩运动,推杆的这些特性能很好的满足水平方向的定位要求。
滚珠丝杆和电动推杆均采用点动控制,能高精度的达到要采摘的草莓位置。在丝杆的一侧采用光杆和丝杆,光杆在这里是代替丝杆所承受的机械部件的压力,增加了丝杆的刚性。
1.4 传送机构的设计
皮带传动:具有恒定的传动比,工作时无滑动,传动准确。传动效率高,一般可达98%,节能效果显著。结构简单,制造成本低,安装维护方便。皮带富于弹性,可以缓和冲击和振动,因此运转平稳,工作时噪声较低。制造和安装精度不像啮合传动要求那样严格。结合要实现传送草莓,以及减少成本,安装精度等要求选用皮带传动。采用张紧的环形的皮带,套在两根传动轴的皮带轮上,它依靠皮带和皮带轮张紧时产生的摩擦力,将一轴的动力传给另一轴。
整体运作:草莓在滑道的引导下掉落在传送带较低的一端,通过皮带轮的传送,运输到带皮轮的另一侧然后掉落在篮子里实现收集功能。
2 草莓采摘机重要零部件的有限元分析
2.1 采摘机构的设计
为了保证草莓的顺利采摘制作了三爪旋转刀具,草莓采摘机构的结构示意图见图2。
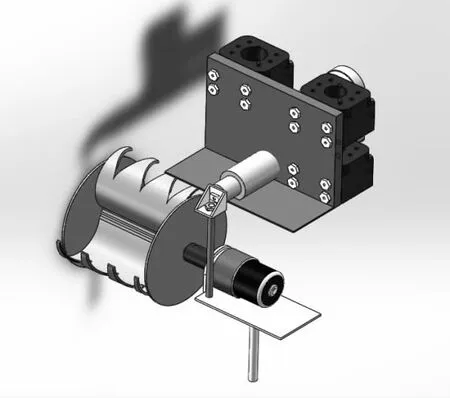
图2 草莓采摘机构三维图
2.2 三爪旋转刀具的受力
三爪旋转刀具的主要受力来自其旋转状态下与草莓的撞击,但由于这个工作状态下受力比较复杂,我们要对其受力作以下简化[4]。见图3。
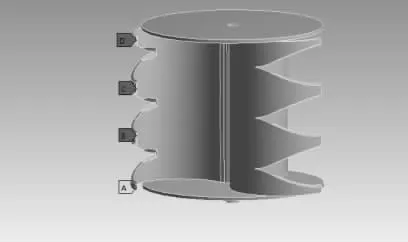
图3 三爪旋转刀具受力简化图
(1) 刀具以一个较低的角速度旋转,同时在半径较小的情况下线速度同样较小,将其简化为静态模型。
(2) 由于刀具的结构可知刀具的危险截面在根部和两齿之间的中间截面。将草莓的落点简化集中在刀尖处,并简化其作用力的大小为草莓的重力,大小为1 N,方向垂直刀片平面。
2.3 模型建立与网格划分
在Solidworks 中绘制三维图另存为x_t 后缀文件,再导入ANSYS Workbench 中,划分网格见图4。网格划分采用自动方式划分,单元格尺寸设置为5 mm,网格划分产生了个17 463 单元网格和34 914个节点。
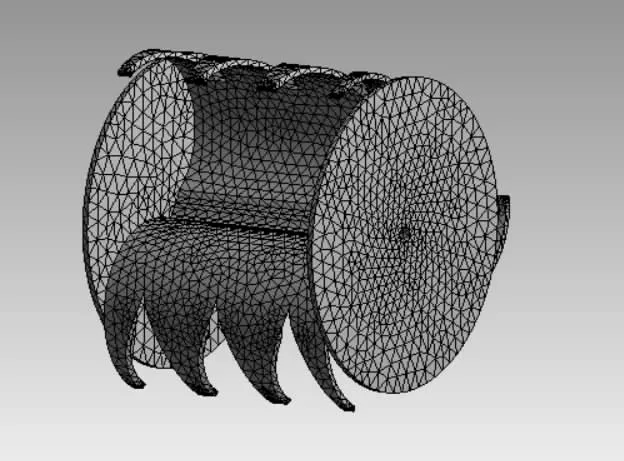
图4 5 mm 网格
2.4 计算结果分析
通过有限元仿真分析,三爪旋转刀具的等效应力和在形变分布,见图5。

图5 三爪旋转刀具应力分析结果
从等效应力分析的结果最大应力为3.126 4 Mpa,小于该材料的许用应力,因此三爪旋转刀具在工作状态下是安全的。
形变分析结果见图6,由图6 得出最大形变量为0.015 mm,最大变形远小于三爪旋转刀具的失效形变量,所以不影响其正常工作。
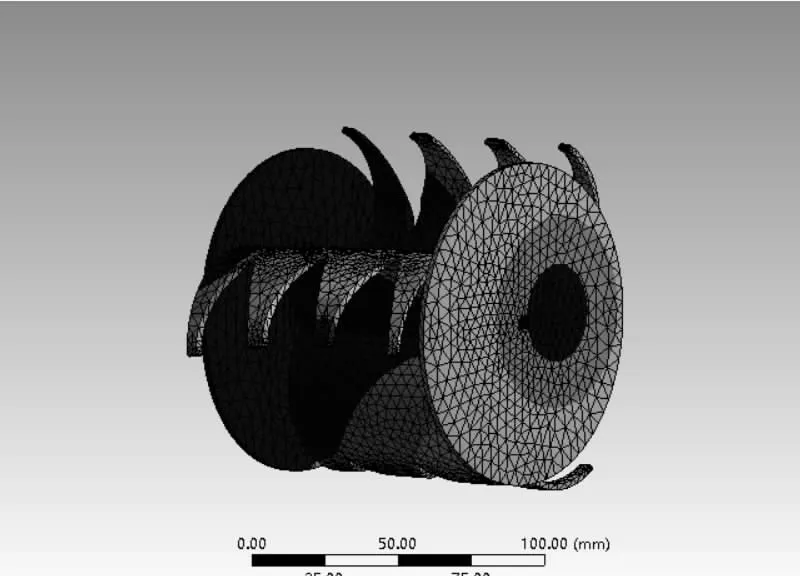
图6 形变分析结果
3 实物验证
根据solidworks 绘制的三维结构图尺寸采用合适的材料制作出实物,采用plc 控制草莓采摘机的自动运行。前期对零部件实物装配性和干涉进行了试验,后期在实地进行模拟采摘,采摘效果良好,实物试验见图7。

图7 实物试验演示
4 结论
传统的草莓采摘方式效率低劳动强度大,采摘时间长, 影响草莓的新鲜度及口感, 既然草莓的生长周期不能缩短, 需求又大, 高效快速的采摘草莓就显得尤为重要。草莓采摘机在商业上有着极大的需求。
猜你喜欢
汽车工艺师(2022年9期)2022-10-09
科学与财富(2022年3期)2022-06-01
汽车电器(2022年2期)2022-03-01
装备维修技术(2020年10期)2020-11-19
科技创新导报(2016年4期)2016-11-19
演艺科技(2016年9期)2016-05-14
科学种养(2015年11期)2015-11-10
短篇小说(原创版)(2010年7期)2010-06-28
小小说月刊(2010年9期)2010-05-14
祝您健康(1985年6期)1985-12-30