对转螺旋桨空化过程的噪声解调谱特性研究
2022-09-23 09:19:28洪煜宸
电声技术 2022年7期
洪煜宸
(杭州应用声学研究所声呐技术重点实验室,浙江 杭州 310012)
0 引言
对转螺旋桨(Counter-Rotating Propeller,CRP)将两个普通的螺旋桨嵌套在同心的轴上,前后桨叶转向相反,属于组合式推进器,具有效率高、扭矩平衡、节能等优点,是水下航行器实现高速运行的常用推进方式之一。为研究对转螺旋桨的解调谱特性,本文对对转螺旋桨的噪声仿真模型进行理论特征分析,通过螺旋桨辐射噪声测量实验系统,获取对转螺旋桨在不同空化程度下的辐射噪声数据,对对转螺旋桨噪声数据的解调谱特性进行分析;通过与辐射噪声数值仿真计算结果的对比,完成对对转螺旋桨空化过程噪声的解调谱特性研究。
1 对转桨噪声解调谱特性预报
1.1 对转螺旋桨噪声模型
目标在航行过程中,其辐射噪声特征与航行工况密切相关。通常,水动力噪声较小,常被机械噪声和螺旋桨噪声掩盖[1]。当目标航速较低或航深较深时,目标螺旋桨不易发生空化,目标舰船航行于非空化状态,螺旋桨噪声较小,此时水下对转螺旋桨桨叶壁面的湍流边界层脉动压力呈现偶极子属性,辐射效率最高,是主要辐射声源;而螺旋桨发生空化,其辐射噪声将急剧增加,覆盖部分机械噪声,此时单极子螺旋桨空化噪声占主要地位。
对转桨的辐射噪声一般由前后桨互相干涉形成的噪声和非均匀谐波流场作用下的辐射噪声两部分组成。空化噪声来源于空化泡的生成与溃灭,引起桨叶表面的流体体积变化,属于单极子属性。从单个螺旋桨桨叶出发分析,有Goldstein 的声相似方程[2-3]为

式中:dS(y)=dγ0dr0,r0为螺旋桨径向,γ0表示桨叶在螺旋方向上离开0 时刻螺旋桨母线位置的距离,方向与声源运动方向相反,ξ0垂直于r0和γ0;G表示格林函数,ρ0表示水中密度,vn表示螺旋桨表面流体速度的法向分量,Tij表示lighthill应力张量,P(x,t)为场点x处在t时刻的声压。
当螺旋桨叶表面未出现空化时,作用在桨叶表面的非定常力源为主要发声源,性质为偶极子源。考虑前后桨相互作用效应引起的远场辐射噪声,采用数学物理方法,经过一系列的近似和推导[3],可以得到前桨声压在后桨干涉下的表达式:

考虑周向谐波流场效应对后桨的影响,前桨在谐波流场作用下的远场声压为

同理可得后桨声压在前桨干涉下的表达式及后桨在谐波流场作用下的远场声压。
式(2)中前后桨相互干涉作用的参数表示有:
式(3)中谐波流场作用的参数表示有:

式(2)~式(5)中:i=1 表示前桨,i=2 表示后桨;Ci表示桨叶片的弦长,Di表示螺旋桨的直径,ni表示谐波数,Bi表示前后桨的叶片数,MCA,FA分别表示叶片的侧斜和纵倾量,Φ,Φ(1),Φ(2)表示初始相位角,CLi,CLiωi分别代表前后桨相互干扰及流场干扰所引起的非定常升力系数,Mx表示前进马赫数,Mt表示桨叶梢旋转马赫数,ψ表示螺旋桨桨叶切面的形状函数。
得到对转螺旋桨总的线谱噪声应为式(2)、式(3)及后桨噪声的叠加,即为

由于非空化与空化状态下占主导地位的噪声不同,单级子声源中的tb·K2·Ψ(K)与螺旋桨的厚度和形状相关,偶极子声源kCLψ(k)/2 与声源的负荷(升力)和形状相关,据此可得空化状态下对转螺旋桨的噪声模型,此处不再赘述。
1.2 对转螺旋桨调制谱特性
相关研究表明[5],螺旋桨空化前辐射噪声较低且主要集中在低频段,螺旋桨未发生空化时,其轴叶频调制线谱不明显,随转速提高,轴叶频调制变清晰且谐波较多;螺旋桨完全空化后,空化后辐射噪声增加,高频成分增加明显,部分调制线谱谐波被连续谱覆盖。随着螺旋桨由非空化状态发展到空化状态,根据辐射噪声声源级变化趋势,同时结合目标航速、距离等信息,可以在一定程度上判断螺旋桨空化程度。
考虑后桨在前桨的干涉作用下辐射声压谱的调制特征,有调制函数[4]:

对转桨噪声调制线谱的调制深度为
式(8)调制函数表明,水下对转桨的不同模式空间在特征值为k2ω2-n2B2时,调制频率为n2B2Ω2+n1B1Ω1/2π,1/1-Mx2cosθ2为表征多普勒频移的特征量。可得调制线谱为

式中:BPF1,BPF2为前、后桨的叶频,Pmod,hmod为谐波系数。
式(8)表示了后桨在前桨干涉作用下的调制深度。后桨对前桨的干涉以及流场对双桨作用后的调制深度也可以同理推导得到。调制深度与对转桨桨叶数、桨叶毂径比、转速等因素有关。由于式(8)形式为贝塞尔函数,值随其阶数的增加而变小,意味着随着叶频及其谐波倍数的增加,调制深度会相应逐渐减小。故由以上推导可知,对转桨辐射噪声的调制线谱主要集中在中低频段,轴频、桨叶频、叶频谐波及组合是构成调制线谱的主要形式。
本文对分析得到的对转桨噪声模型进行仿真。图1 为对转螺旋桨的仿真信号的调制谱,线谱包含轴频、前桨叶频、后桨叶频、前后桨叶频及以上特征频率的谐波组合。APF,BPF 分别表示轴频及前后桨叶频。

图1 对转螺旋桨仿真调频谱
2 对转桨噪声解调谱特性实验
2.1 对转螺旋桨噪声模型
为了比较研究对转桨在空化过程中的辐射噪声特征,在空泡水筒中进行对转螺旋桨噪声测试。空泡水筒环境可以进行较大范围内的压力和流速调节,容易达到螺旋桨在实际环境中的工作状态。本实验定制的新型螺旋桨模型,具有噪声较小、空化条件较苛刻的特点。试验对转桨空化发展过程测试采用等空泡数方法,试验空泡数代表实际航行的空化状态,并按照设定的流速和对转桨设计进速系数确定试验转速,用单水听器测量测点辐射噪声,另外采用假毂测量同工况背景噪声。
2.2 对转螺旋桨试验线谱特征分析
试验首先测量了5 种不同空泡数下的工况。空泡数可以体现螺旋桨的空化状态。不同工况空泡数与空化状态及1 kHz 下的归一化噪声级如表1所示。

表1 不同工况空泡数与空化状态
对转桨噪声不同工况的功率谱处理结果如图2所示。
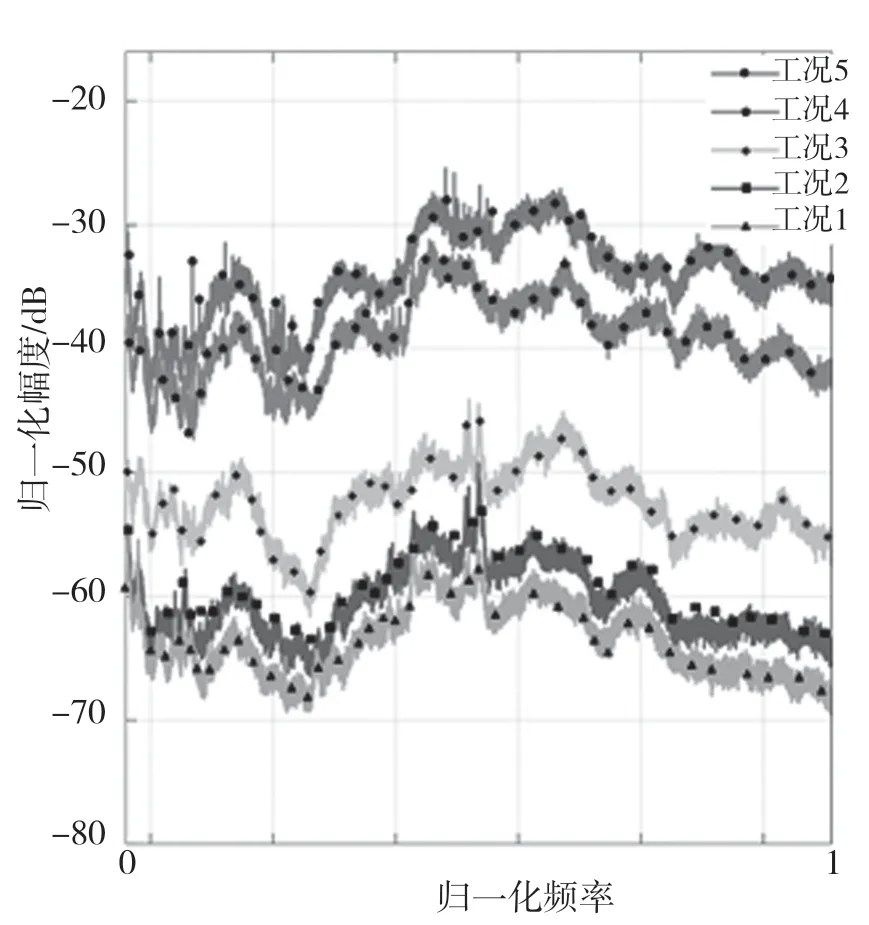
图2 工况1~5 的功率谱
随着空化程度上升,空化噪声有着显著提高。工况5 具有最强烈的空化工况,此工况下的功率谱具有显著的线谱特征。工况4 在某些线谱簇也具有谐波特征。其余未发生空化的工况下,功率谱中包含螺旋桨噪声的特征较少,空泡水筒中的背景噪声较强,未空化的工况下掩盖了螺旋桨噪声及其特征。
从对功率谱的分析中可以得到结论:空化状态下的对转桨噪声级较大,具有明显的功率谱线谱特征,线谱频率与轴叶频密切相关;本实验条件下功率谱难以体现对转桨噪声的特征,需要进一步对噪声进行研究。
2.3 对转螺旋桨试验解调谱特征分析
许多文献研究[6-8]表明,水下航行器的螺旋桨噪声中存在大量调制至高频连续谱的低频特征线谱,这些特征往往包含了水下航行器的机械状态信息和运动信息,对于水下航行器的识别具有重要意义。在研究过程中通常使用解调方法处理噪声,解调出调制线谱,以期通过解调谱的结构获得目标的特征信息。
由于工况4 为空化初生状态,本节将工况3 与工况4 进行横向对比,分析结果以归一化频率表示,如图3~图6 所示。
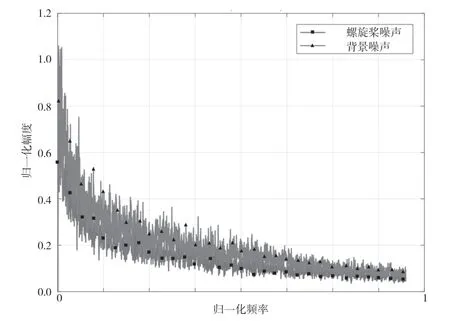
图3 工况3 的频段1 解调谱
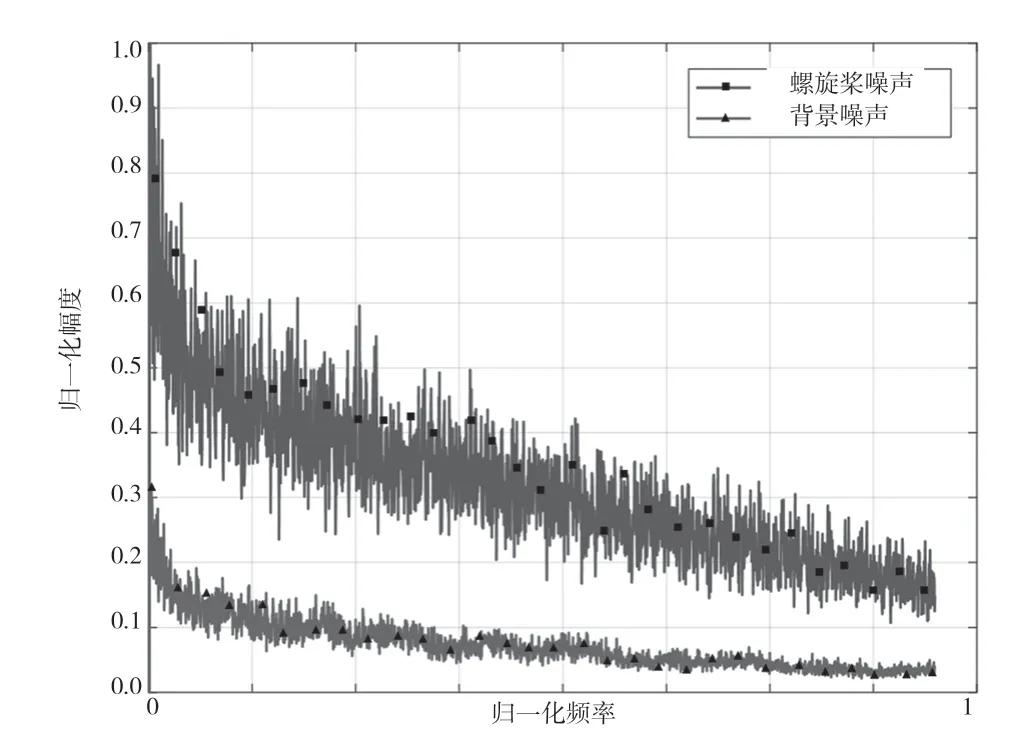
图4 工况3 的频段2 解调谱
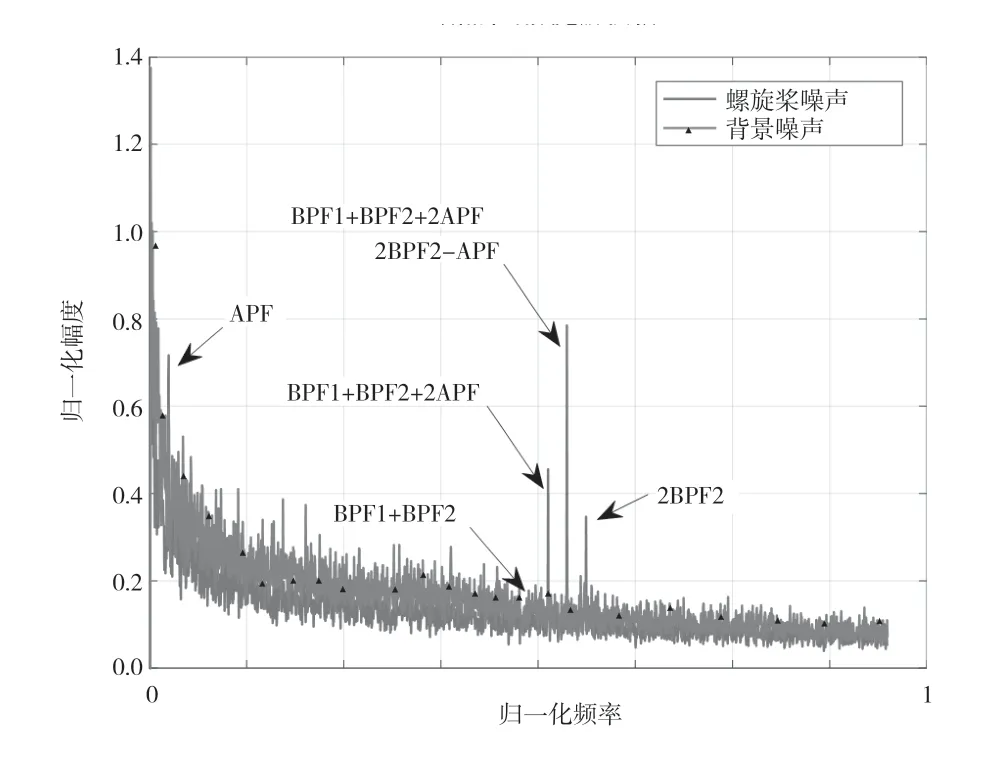
图5 工况4 的频段1 解调谱
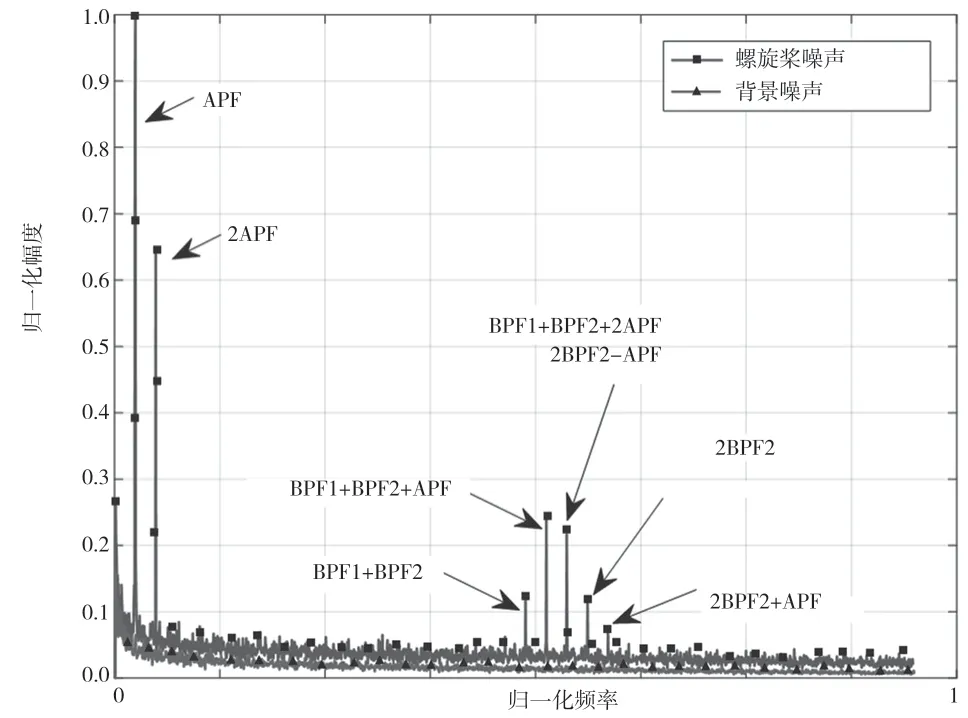
图6 工况4 的频段2 解调谱
从工况3、工况4 的解调谱特征中可以得到以下结论。
(1)对转螺旋桨的解调谱频率满足式(9)中的表述,即,调制线谱的主要形式为轴频、双桨桨叶频以及三者谐波的组合;这些组合并非均能出现,受试验环境、测量条件等影响,实际线谱仅在有代表性的几个位置出现。
(2)非空化情形下,对转桨的调制谱特征并不明显;在空泡水筒的实验条件下,整体的螺旋桨噪声较弱,信噪比低,调制深度浅。通过常规分析仅能得到轴频特征,叶频等其他特征难以分辨。
(3)工况4 代表空化初生时的工作状态。当对转桨进入空泡初生阶段时,螺旋桨噪声的整体噪声级迅速提升,调制作用明显,容易得到调制线谱特征。
工况5 下,支架和导管空化严重,伴随前后桨梢涡空化。将工况4 与工况5 进行横向对比,工况5 解调谱如图7、图8 所示。

图7 工况5 频段1 解调谱
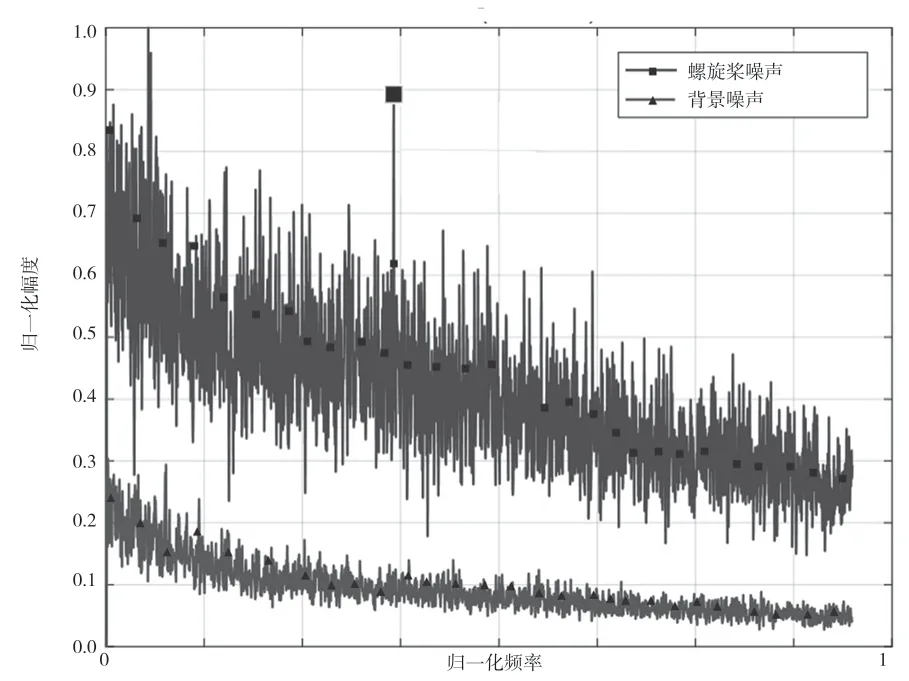
图8 工况5 频段2 解调谱
将图7、图8 中的工况5 与图5、图6 中的工况4 的解调谱特征进行对比,可以得到以下结论。
(1)完全空化状态下的对转螺旋桨噪声占主导地位。相比工况2,螺旋桨噪声与背景噪声的对比要更为显著。
(2)完全空化状态下,解调谱仍存在大量的离散线谱,难以提取到目标特征;或者可以认为完全空化状态下的对转螺旋桨噪声出现了大量的连续谱,螺旋桨幅度调制被空化噪声所掩盖。
综上所述,可以认为,声压总能量级、调制谱的频率及其调制深度可以作为判断水下对转桨目标运动状态的重要依据:
(1)对转桨未发生空化时,整体噪声较弱,调制线谱较弱;
(2)当目标逐渐来到空化初生状态时,噪声级显著提高,此时调制谱的调制深度最深;
(3)当目标达到完全空化的状态时,螺旋桨幅度调制被空化噪声所掩盖,难以从解调谱中得到目标信息。此时功率谱的线谱及连续谱特征更能代表目标特性。
3 结语
本文依据高速螺旋桨辐射噪声仿真模型,对对转螺旋桨的声场预报结果进行特征分析,结论为:水下对转桨辐射噪声具有丰富的目标线谱,主要由非均匀流作用于桨叶及双桨的相互作用所致;调制线谱主要集中在中低频段,调制线谱的形式主要由轴频、双桨叶频以及三者谐波的组合所构成。
本文通过螺旋桨辐射噪声测量实验,获取对转螺旋桨在空化过程中的辐射噪声数据,同时利用多频段解调的方法,对对转螺旋桨噪声数据进行特性分析,对在空化过程中的对转螺旋桨特征进行研究,认为声压总能量级、调制谱的频率及其调制深度可以作为判断水下对转桨目标运动状态的重要依据;对转桨在未空化时,调制作用不明显;在空化初生状态时,噪声级显著提高,调制深度最深,而完全空化的状态下连续谱噪声占了主导地位,调制深度降低。
猜你喜欢
钢铁钒钛(2023年5期)2023-11-17 08:48:34
火控雷达技术(2023年2期)2023-07-15 14:00:06
舰船科学技术(2022年10期)2022-06-17 06:27:00
固体火箭技术(2018年6期)2019-01-18 10:56:26
厦门理工学院学报(2016年1期)2016-12-01 04:50:53
水利科技与经济(2016年7期)2016-04-25 13:03:00
振动工程学报(2015年2期)2015-03-01 01:16:07
舰船科学技术(2015年8期)2015-02-27 15:38:52
固体火箭技术(2014年3期)2014-03-15 06:47:06
舰船科学技术(2014年5期)2014-03-08 06:43:40